(L2): When, is a credible deviation if
advertisement
: When, is a credible deviation if")
Imperfect Signaling
and the Local Credibility Test
Hongbin Cai, John Riley and Lixin Ye*
November, 2004
Abstract
In this paper we study equilibrium refinement in signaling models. We propose a
Local Credibility Test (LCT) that is somewhat stronger than the Cho and Kreps Intuitive
Criterion but weaker than the “strong Intuitive Criterion” of Grossman and Perry.
Allowing deviations by a pool of “nearby” types, the LCT gives consistent solutions for
any positive, though not necessarily perfect, correlation between the signal sender’s true
types (e.g., signaling cost) and the value to the signal receiver (e.g., marginal product). It
also avoids ruling out reasonable pooling equilibria when separating equilibria do not
make sense. We identify conditions for the LCT to be satisfied in equilibrium for both the
finite type case and the continuous type case, and demonstrate that the results are
identical as we take the limit of the finite type case. We then apply the characterization
results to the Spence education signaling model and the Milgrom and Roberts advertising
signaling model. Intuitively, the conditions for a separating equilibrium to survive our
LCT test require that a measure of signaling “effectiveness” is sufficiently high for every
type and that the type distribution is not tilted upwards too much.
*UCLA, UCLA, and Ohio State University. We would like to thank In-Koo Cho, David
Cooper, Massimo Morelli, James Peck, and seminar participants at Arizona University,
Illinois Workshop on Economic Theory, Ohio State University, Penn State University,
Rutgers University, UC Riverside, UC Santa Barbara, and Case Western Reserve
University, for helpful comments and suggestions. All remaining errors are our own.
1.
Introduction
Since the seminal work of Cho and Kreps (1987), various refinement concepts
have been proposed to rank different equilibria in signaling games in terms of their
“reasonableness”. However, the mission is still far from being completed. In many
applications, signals are “imperfect” in the sense that there is a positive yet imperfect
correlation between the signal sender’s true type (e.g., signaling cost) and the signal
receiver’s expected value (which then determines her response), see Riley (2001, 2002).
Consider a situation in which two of the sender types have a same signaling cost but quite
different values to the receiver. If these two types do not observe their values to the
receiver, they are effectively the same type, so the existing refinement concepts, such as
the Cho and Kreps Intuitive Criterion, apply in the usual way. However, if these two
types do observe their different values to the receiver, then the Intuitive Criterion is
unable to rank equilibria. The reason is that if one of the two types likes a deviation, the
other also likes it, hence no deviation is credible by a single type. This is highly
unsatisfactory because the two cases are observationally equivalent.
The reason for the inconsistent solutions in the above example is that the existing
refinement concepts focus on deviations by a single type only and do not consider
deviations by a pool of types. Grossman and Perry (1986a,b), in a bargaining context,
propose an equilibrium refinement concept strengthening the Cho-Kreps Intuitive
criterion to allow pooling deviations. In this paper, in a general signaling model, we
weaken slightly the Grossman-Perry Strong Intuitive Criterion, and propose a “Local
Credibility Test” (LCT) in which a possible deviation is interpreted as coming from one
or more types whose equilibrium actions are nearby. We consider only local pooling
deviations, first because they seem to us more natural, second because they have much of
the power of global pooling deviations, and third because they are more easily analyzed.
Moreover, the Local Credibility Test does not always rule out pooling equilibria
in favor of separating equilibria. We will argue that in some situations separating
equilibria seem unreasonable while pooling equilibria can be rather appealing. By
allowing pooling deviations, the LCT avoids ruling out pooling equilibria in such
situations. Consider a simple two type education-signaling model, in which the high type
must take a quite costly signal (e.g., several years of unproductive education) to separate
1
from the low type. Now suppose there is only one low type agent in every 5 million high
type agents. In such a situation separation seems highly unreasonable, because without
taking the costly signaling action an agent should not be perceived much differently from
being the high type. By the LCT, it is easy to see that in any separating equilibrium a
pooling deviation to some sufficiently low cost level of the signal is profitable to both
types, so no separating equilibrium satisfies the LCT.
The thrust of our analysis is to derive conditions under which there exist
equilibria satisfying the LCT. We study a family of continuous type models of which the
Spence education signaling and the Milgrom and Roberts advertising signaling are both
members. We begin by formulating the concept of the LCT for the finite type models
first, since the intuition is easier to present. Then we consider a discretization of the
continuous type model, and take the limit as the discretization becomes finer. We
characterize conditions under which the Pareto dominant separating equilibrium of the
model satisfies the LCT. The required conditions are intuitive. As long as a measure of
signaling “effectiveness” is sufficiently high for every type and the type distribution is
not tilted upwards too much, the separating equilibrium can survive our LCT test.
In the continuous type case, the set of equilibrium signals is dense so that out-ofequilibrium signals can be only found outside the set of equilibrium signals. However,
thinking of the continuous type case as the limiting case of the finite type case with many
close types, it is natural to generalize the concept of the LCT to the continuous type. An
equilibrium survives the LCT if no deviation-perception pair is credible in the following
sense: for any possible deviation signal (on- or off-equilibrium), if it is interpreted as
from types of a small neighborhood of the immediate equilibrium type, it is profitable for
the types in this neighborhood to deviate to this signal, but unprofitable for types out of
this neighborhood to do so. Another way of thinking about this credibility test in the
continuous type case is the following. If, for an on-equilibrium signal, there is such a
deviation-perception pair, then those nearby types can credibly deviate to the particular
on-equilibrium signal by throwing away
amount of money.
We derive conditions under which the LCT is satisfied in equilibrium in the
continuous type case. The conditions are exactly the same as in the limiting finite type
case. This is satisfactory, because models with continuous types and models with finitely
2
many types are theoretical tools for analyzing the same kind of real world problems. Put
differently, it would be highly unsatisfactory if an equilibrium refinement concept applies
to one case but not the other, or gives different answers for the two cases.
The paper is structured as follows. The next section uses simple examples to
illustrate the basic idea of the LCT. Then Section 3 presents the general signaling model.
In Section 4, we formulate the concept of the LCT for the finite type case. Then we
derive conditions under which the LCT is satisfied by the Pareto dominant separating
equilibrium in a discretized continuous type model as the discretization becomes finer.
Section 5 generalizes the formulation of the LCT to the continuous type case, and shows
that the conditions for the LCT are exactly the same as in the discrete type case. We
discuss an issue of robustness in Section 6. Concluding remarks are in Section 7.
2.
Examples
A consultant ( si , v j ) has a signaling cost type si and a marginal product of v j ,
where s1 s2 ... sn and v1 v2 ... vm . She can signal at level z at a cost of C ( z, si ) .
We suppose that
C
( z , s ) 0 so that a higher type has a lower signaling cost. If paid a
s
wage w her payoff is U ( z, w, si ) w C ( z, si ) . In a competitive labor market for
consultants, her wage will be her marginal product perceived by the market. Activity z is
a potential signal because the marginal cost of signaling,
C
( z , si ) , is a decreasing
z
function of si . The set of signaling cost types is S {s1 ,..., sn } , and the set of possible
productivity levels is V {v1 ,..., vm } . The probability of each type, ( si , v j ) , is common
knowledge.1
1
If ( si , v j ) 0 for all i j , the model reduces to the usual Spence model in which the negative
correlation between signaling cost and value to receivers is perfect. While we assume ( si , v j ) 0 for all
i and j , the analysis applies generally.
3
Initially we assume that each consultant observes her own signaling cost type but
not her productivity. We define v(si ) E{v | si } , and assume that types with lower
signaling costs have higher expected productivity , that is, v( s1 ) v(s2 ) ... v(sn ) .
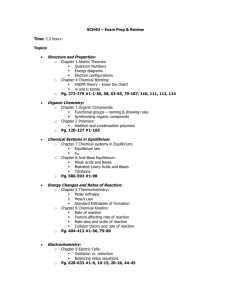
There is a continuum of separating Nash equilibria in this game. A Nash
separating equilibrium with three signaling cost types is depicted below. Each curve is
an indifference curve for some signaling cost type. A less heavy curve indicates a lower
signaling cost type. Note that the equilibrium choice for each type si (indicated by a
shaded dot) is strictly preferred over the choices of the other types. Such an equilibrium
fails the Intuitive Criterion first proposed by Cho and Kreps (1987).2
I1
I2
I3
v( s3 )
v( s2 )
v( s1 )
z
ẑ
z1 0
z2
z3
Fig: 2-1: Separating Nash Equilibria
To see this, suppose an individual chooses the signal ẑ and argues that she is type
s2 . Is this credible? If the individual is believed, her wage will be bid up to v( s2 ) so she
earns the same wage as in the Nash equilibrium but incurs a lower signaling cost.
2
As noted by Cho and Kreps (1987), with more than two types, it is necessary to modify their original
Intuitive Criterion or it loses much of its power. For the modified Intuitive Criterion the question is whether
any particular type is uniquely able to benefit from some out-of-equilibrium signal if the signal receivers
correctly infer the signaler’s type.
4
However ( zˆ, v(s2 )) is strictly worse than ( z1 , v( s1 )) for type s1 and strictly worse than
( z3 , v( s3 )) for type s3 . Thus the claim is indeed credible.
Similar arguments rule out any Nash equilibrium where different signaling cost
types are pooled. Thus the only equilibrium that satisfies the Intuitive Criterion is the
Pareto dominant separating equilibrium (i.e., the Riley outcome) in which each “local
upward constraint” is binding.
Next suppose that each consultant knows both her signaling cost type and her
marginal product. Again consider the Nash Equilibrium depicted above. Suppose in this
equilibrium three different types are pooled at each signal level. Consider the three types
( s2 , v1 ), ( s2 , v2 ), ( s2 , v3 ) pooled at z2 . Suppose a consultant chooses ẑ and claims to be
type ( s2 , v3 ) . Is this credible? If the claim is believed, the consultant’s wage will rise
from v( s2 ) to v3 thus the consultant is indeed better off. But any offer that makes type
( s2 , v3 ) better off also make types ( s2 , v1 ) and ( s2 , v2 ) better off, since they have the
same signaling cost. Thus there is no credible claim that type ( s2 , v3 ) alone can make. A
similar argument holds for each of the other types. Thus any Nash separating equilibrium
satisfies the Intuitive Criterion. An almost identical argument establishes that any Nash
Equilibrium with (partial) pooling satisfies the Intuitive Criterion as well.3
Since all the types with the same signaling cost are observationally equivalent, it
seems to us that any argument for ranking the equilibria in the first model (productivity
unknown) should also be applicable to the second model as well. There is a simple
modification to the Intuitive Criterion that achieves this goal. A consultant takes an outof-equilibrium action ẑ and argues that she is one of the types who, in the Nash
Equilibrium would have chosen z2 . This being the case, applying the Bayes Rule, her
3
It can be verified that the Cho and Sobel (1990)’s refinement concept of “divinity”, which is built on the
idea of stability of Kohlberg and Mertens (1986) and can be considered as a logic offspring of the Intuitive
Criterion, does not have power either in the above example. Ramey (1996) extends the Cho and Sobel’s
divinity concept to the case of a continuum of types. Like the Intuitive Criterion, divinity faces the same
problem of distinguishing types ( s2 , v1 ), ( s2 , v2 ), ( s2 , v3 ) to interpret a possible deviation, while these
types have the same incentives to deviate. Riley (2001) discusses in greater details these and other
refinement concepts.
5
expected marginal product is v( s2 ) . Then once again, the unique Nash Equilibriums
satisfying the modified Intuitive Criterion is the Pareto Dominant separating equilibrium.
We now argue that for some parameter values, the Pareto Dominant separating
equilibrium defies common sense. Consider the following example. Suppose there are
two signaling cost types. For those with a high signaling cost ( s s1 ), the cost of
signaling is c1 ( z ) with c1 (0) 0 and c1 0 , and the mean marginal product is 100. For
those with a low signaling cost ( s s2 ) , the signaling cost is c2 ( z ) (1
100
)c1 ( z ) and
the mean marginal product is 200. The Pareto dominant separating equilibrium is
depicted below.
w
200
100
U 2 ( z, w) U 2 ( z2 , 200)
100
U1 ( z, w) U1 (0,100)
z
Fig. 2.2: Separating equilibrium with a gain of
The low type must be indifferent between (0, v( s1 )) and the choice of type s2 , that is
( z2 , v( s2 )) . Therefore,
U1 100 200 c1 ( z2 ) and so c1 ( z2 ) 100
The payoff for type s2 is therefore
6
U 2 v( s2 ) c2 ( z2 ) 200 (1
100
)c1 ( z2 ) 100 .
Suppose that only 1 in 100 consultants is of type s1 . Then the unconditional mean
marginal product is 199. Thus essentially all the social surplus generated by the high
types is dissipated by signaling and both types have an income which is approximately
half the income that would have in the Nash pooling equilibrium! We believe a better
criterion for ranking equilibria should not rule out pooling equilibria in such
circumstances. We now introduce a further simple modification of the Intuitive Criterion
that achieves this outcome.
Local Credibility Test:
Suppose that an out-of-equilibrium signal ẑ is observed and that z is the largest Nash
Equilibrium signal less than ẑ and z is the smallest Nash Equilibrium signal greater
than ẑ , if they exist. Let Ŝ be the subset of signaling cost types choosing z or z with
positive probability. For each S Sˆ , define v ( S ) E{v | s S} . Then the equilibrium
passes the Local Credibility Test (LCT) if there is no S such that ( zˆ, v ( S )) is strictly
preferred over the Nash Equilibrium outcome if and only if s S .
Note that if ẑ is smaller (greater) than all equilibrium signals, then z ( z ) does
not exist and z ( z ) is the smallest (largest) equilibrium signal. By the above definition,
Ŝ is the subset of types choosing z ( z ). Also note that by considering a subset of Ŝ
to be the singleton set of a single type choosing z or z , the definition of the Local
Credibility Test allows deviations by single types. It follows that only separating
equilibria can pass the Local Credibility Test.
The idea of the Local Credibility Test is weaker than the Strong Intuitive
Criterion (SIC) proposed by Grossman and Perry (1986a,b). For any out-of-equilibrium
signal ẑ , their criterion considers any subset of types as a potential deviating pool. An
equilibrium fails the SIC if ẑ is credible for one subset of types. Here we restrict
attention to local deviations. This makes the analysis more tractable and, we believe,
more plausible.
7
Using the idea of the Local Credibility Test, we show that for the simple
consulting example above, the Pareto dominant separating Nash Equilibrium is robust to
credible pooling deviations. For concreteness, suppose c1 ( z ) 100 z and c2 ( z ) 99 z .
Then in the Pareto dominant separating equilibrium, z1 0 and z2 1 . Consider any
convex combination zˆ (1 ) z1 z2 z2 . Then by the definition of the LCT,
Sˆ {s1, s2} . Consider S Sˆ . The average productivity of these two signaling cost types is
199. For ẑ to be a credible deviation by S , both types must strictly prefer ( zˆ,199) .
Note that
U1 ( zˆ,199) 199 100 and U 2 ( zˆ,199) 199 99 ,
and the equilibrium payoffs are 100 and 101. Thus, for all zˆ 98/ 99 , both types are
indeed better off choosing the out-of-equilibrium ẑ . The Pareto dominant separating
Nash Equilibrium thus fails the LCT. In fact no equilibrium passes the LCT, so the
criterion fails to rank the different Nash Equilibria.
We now show how the LCT can be applied when there are many types and, in the
limit, a continuum of types. Let the set of signaling cost types be S {s1 ,..., sn } , with
probabilities { f1 ,..., f n } where
C ( z , si )
i
fi 1 . Suppose type si has a signaling cost
c( z )
, where si 1 si 0 . We also assume that the expected marginal
si
product of those of type si have an expected marginal product of v( si ) si .
We seek conditions under which the Pareto dominant separating equilibrium
passes the LCT. In this equilibrium, the local upward constraints are binding. Therefore,
as depicted below, those with signaling cost type si 1 are indifferent between
( zi 1, si 1 ) and ( zi , si ) . (The indifference curve is labeled Ii 1 .) We construct the signal
levels ẑ and zi 1 as follows. Choose z so that those with signal type si 1 are indifferent
between ( zi , si ) and ( z , 12 si 12 si 1 ) . In the Figure below, these are the points Ci and C .
Then choose zi 1 so that those with signal cost type si 1 are indifferent between
( z , 12 si 12 si 1 ) and ( zi 1, si 1 ) .
8
w
Ii 1
Ii
( zˆ, wˆ )
Ii 1
Ci 1
si 1
1
s
2 i
C
12 si 1
Ci
si
( zi 1, si 1 )
zi
z
z
zi 1
Fig. 2-3: Applying the LCT with many types
In Figure 2.3, these are the points C and Ci 1 . We will argue that type si must be
indifferent between Ci and Ci 1 as depicted. That is, Ci 1 is the efficient separating
contract for those with signaling cost type si 1 .
A type s j consultant is indifferent between ( z, w) and ( z, w) if and only if
w
c( z )
c( z )
,
w
sj
sj
that is, if
c( z ) c( z ) s j ( w w)
(2.1)
By construction, a type si 1 consultant is indifferent between ( zi , si ) and
( z , 12 zi 12 zi 1 ) . Appealing to (2.1),
c( z ) c( zi ) si 1 ( 12 si 12 si 1 si ) 12 si 1 (si 1 si ) .
9
(2.2)
Also, a type si 1 consultant is indifferent between ( z , 12 zi 12 zi1 ) and ( zi1, si1 ) . Again
appealing to (2.1),
c( zi 1 ) c( z ) si 1 (si 1 12 si 12 si 1 ) 12 si 1 (si 1 si ) .
(2.3)
Adding equations (2.2) and (2.3) and noting that, by hypothesis, si 12 si 1 12 si 1 , it
follows that
c( zi 1 ) c( zi ) si ( si 1 si ) .
Appealing, finally, to (2.1), it follows that type si is indeed indifferent between
( zi , si ) and ( zi 1, si 1 ) . Thus the point Ci 1 is the Pareto dominant separating Nash
Equilibrium contract for type si 1 .
Note that for any wage ŵ above 12 si 12 si 1 , there is a signal ẑ between z and
zi 1 that is strictly preferred by those with signaling cost type si and si 1 but is not
preferred by type si 1 (or lower types). If fi fi 1 , the expected marginal product of
these two types,
fi si fi 1si 1
exceeds
fi fi 1
1
s
2 i
12 si 1 and, we can choose ŵ to be equal to
the expected marginal product. Then if types si and si 1 choose the out-of-equilibrium
signal ẑ , they can expect to be paid ŵ . The out-of-equilibrium signal is therefore
credible and so the separating equilibrium fails the LCT. Conversely if fi fi 1 , the
expected marginal product of these two types is less than
1
s
2 i
12 si 1 , the out-of-
equilibrium signal ẑ by the two types is not credible. If this holds for all i, that is
fi fi 1, i 1,..., n 1 , the Pareto dominant separating equilibrium passes the LCT.
Note that this condition is independent of the step size between signaling cost
types. Treating the continuum of types in the limit as 0 , it follows that the Pareto
dominant separating equilibrium passes the LCT if the density function f ( s ) is
everywhere decreasing.
10
3.
A General Signaling Model
We consider the following signaling environment. A player, the sender, has
private information denoted by Rn . The sender’s (multidimensional) private
information affects her expected payoff through an aggregated variable called her “true
type” (e.g., marginal cost of signaling). Let s( ) : R, s S [ s , s ] be the true type of
the signal sender. The sender chooses an action (signal), y Y , where Y [ y, y ] is the
set of feasible signals.
Let v( ) : R, v V [ v , v ] be the value of the sender’s product or service to a
receiver. We assume that the receiver’s payoff is linear in v so that it is only the
perceived expected value v̂ which determines the receiver’s response. We can then write
the sender’s payoff as a function U ( si , vˆ, y) of her true type, the receiver’s expected
value and the sender’s signal. When the sender’s private information is
multidimensional, it is natural that the sender and the receiver may have similar
preferences over , but place different weights on its different dimensions. In other
words, the sender’s true type s and the receiver’s value v will be correlated, but not
perfectly correlated.
Let z ( ) : S Y be a strictly monotone signaling function that fully reveals the
true type of the sender. Accordingly, U ( s) U ( s, v( s), z ( s)) is the utility of the sender of
true type s in a separating equilibrium with the signaling schedule z ( s ) , where
v ( s ) = Eq [v (q) | s(q) = s ] .
We maintain the following standard assumptions:
(a) U ( s, vˆ, y ) is third order differentiable in all its elements;
(b) U 2 ( s, vˆ, y) 0 ;
(c) The single crossing condition holds:
U U U U
dvˆ
U3
13 2 2 12 3 0
s dy U
s U 2
U2
11
Under these assumptions, the standard result in the literature (Riley, 1979;
Mailath, 1987) shows that a separating equilibrium of the signaling game satisfies the
following differential equation:
z ( s )
U 2 ( s, v( s ), z ( s ))
U 3 ( s, v( s ), z ( s ))
(2.4)
In many signaling models, the signal is costly so that U 3 ( s, v( s), z ( s)) 0 for all s . In this
paper we make this assumption, and discuss what happens when this assumption is
relaxed. Naturally, in a separating equilibrium the lowest type s gains nothing to choose
any costly signal, so should just choose the least costly signal y . The signaling schedule
given by (2.4) and the initial condition ( s , y ) give rise to the unique Pareto dominant
separating equilibrium of the game.
This formulation of the signaling problem is quite general and includes many
signaling models studied in the existing literature as special cases. We illustrate this with
two examples.4
Example 1: The Spence education signaling model
In the Spence education signaling model, a worker knows her own personal
characteristics related to productivity (e.g., technical knowledge, discipline,
learning ability, work habits, etc). These characteristics can be summarized into a single
dimensional variable: productivity, denoted by s . Then a worker’s expected payoff is
U ( s, sˆ, y ) sˆ C ( s, y ) , where s is her productivity unknown to firms, ŝ is her
productivity perceived by firms and hence is also the wage offered to her by competing
firms, and y is the education signal the worker can choose. It is typically assumed that for
all ( s, y ) , (i) C1( s, y ) 0 ; (ii) C2 ( s, y ) 0 ; and (iii) C12 ( s, y ) 0 . It can be easily
4
Many other applications fit into the general signaling model. In Appendix B, we show that with some
variable transformations, the reserve price signaling model of Cai, Riley and Ye (2003) satisfies all the
assumptions. We then apply our characterization results to check when the Pareto dominant separating
equilibrium in that model satisfies the LCT.
12
verified that the single crossing and all other conditions are satisfied. By the standard
result, a separating equilibrium satisfies
z ( s )
U 2 ( s, s, z ( s ))
1
U 3 ( s, s, z ( s )) C2 ( s, z ( s ))
In the Pareto dominant separating equilibrium, the lowest type chooses the minimum
education level y .
Example 2: An advertising signaling model
This example is adopted from Milgrom and Roberts (1986). A monopolistic firm
can produce a good with a constant marginal cost c . It sells to a unit mass of consumers.
The firm knows its product quality, denoted by s . Among the consumers, 1 are
informed about s . The rest 1 of consumers are uninformed about s , and their belief
is given by the distribution G ( s ) on [ s , s ] . For products of quality s , the consumers’
inverse demand function is p s bq , where b is a positive parameter and q is the
quantity. So, given price p , the demand of an informed consumer is qI ( s p) b , and
that of an uninformed consumer is qU ( sˆ p) b , where ŝ is his perception of s . The
total demand is then q qI (1 )qU .
Suppose the firm spends z on advertising, which leads to a perception of ŝ by
the uninformed consumers. By choosing an optimal price given ŝ , the firm’s maximum
profit is U
[ s (1 ) sˆ c]2
. Consider a possible separating signaling schedule z ( s ) .
4b
The firm’s payoff function is
U ( s, sˆ, z )
[ s (1 ) sˆ c]2
z
4b
It can be checked that this example fits the general model as well. A separating
equilibrium satisfies
z ( s )
U 2 ( s, s, z ( s)) (1 )( s c)
U 3 ( s, s, z ( s ))
2b
In the Pareto dominant separating equilibrium, the lowest type chooses zero advertising.
13
4.
Finite Type Case
In this section we explore conditions under which an equilibrium satisfies the
LCT in the finite type case.
Specifically, the sender has N true types, denoted by s1 s s2 sN s .
Let G(si ) prob.{s si } be the probability distribution of the sender’s true type. Let ŝ
be the receiver’s perception of the sender’s type. The sender’s expected payoff is
U ( s, vˆ, y ) , which satisfies all the assumptions made in Section 2.
Let zi z ( si ) , where z1 z z2 z N z , be an equilibrium signaling
schedule. Consider any signal yˆ Y , yˆ zi , for all i .
(L1): No credible deviation by the lowest type
When ŷ z , ( yˆ , v( s )) is a credible deviation if U ( s , v( s ), z ) U ( s , v( s ), yˆ ) .
(L2): No credible deviation by the highest type
When ŷ z , ( yˆ , v( s )) is a credible deviation if U ( s , v( s ), z ) U ( s , v( s ), yˆ ) .
(L3): No local pooling deviation
Define v(si , si 1 ) E{v | s si or s si 1} . When z ( si ) yˆ z (si 1 ) , ( yˆ , v( si , si 1 ))
is a credible deviation if U ( s j , v( si , si 1 ), yˆ ) U ( s j , v( s j ), z j ), j i and j i 1
and U ( s j , v( si , si 1 ), yˆ ) U ( s j , v( s j ), z j ), j i or i 1 .
(L4): No local deviation by a single type
When z ( si ) yˆ z (si 1 ) , for l i, i 1 , ( yˆ , v(sl )) is a credible deviation if
U ( sl , v( sl ), yˆ ) U ( sl , v( sl ), zl ), and, U ( s j , v( sl ), yˆ ) < U ( s j , v( s j ), z j ), j ¹ l .
By the definition of the Local Credibility Test given in Section 2, if there does not exist
any kind of credible out-of-equilibrium signal-perception, then the equilibrium {(si , zi )}
survives the LCT.
We say that an equilibrium “satisfies” a requirement among (L1)-(L4) if there is
no such credible deviation described in the requirement. Requirements (L1), (L2) and
(L4) are all about deviations of one single type, which are the local conditions of the
Cho-Kreps Intuitive Criterion. When N 2 , they are exactly the Cho-Kreps Intuitive
14
Criterion. Requirement (L3) is the local condition of the Grossman and Perry criterion,
allowing a deviation to be interpreted as from the two nearby types.
By the argument similar to the Cho-Kreps’ Intuitive Criterion, it can be shown
that if an equilibrium satisfies the LCT, it is the Pareto dominant separating equilibrium
(the Riley outcome). Therefore, to check when an equilibrium satisfies the LCT, we only
need to check when the Pareto dominant separating equilibrium satisfies (L3). Consider
the Pareto dominant separating equilibrium depicted in Figure 4.1 below.
I n- 1
In
I n+ 1
sn1
v
sn
zn
y
zn 1
Figure 4.1
For any interior point sn with n 2 , define ( v , y ) be the intercept of indifference
curves I n- 1 and I n+ 1 depicted in Figure 4.1. Then
ìï U ( sn- 1 , v, y ) = U ( sn- 1 , sn , zn )
ïï
ïí U ( s , v, y ) = U ( s , s , z )
n+ 1
n+ 1 n+ 1 n+ 1
ïï
ïïî U ( sn , sn , zn ) = U ( sn , sn+ 1 , zn+ 1 )
(2.5)
Let v be the average type of sn and sn1 , that is,
15
v
[G ( sn ) G ( sn 1 )]sn [G ( sn 1 ) G ( sn )]sn 1
G ( sn 1 ) G ( sn 1 )
(2.6)
For the lower boundary point s1 s , define v as the solution to the following
equation: U ( s2 , v, z ) U ( s2 , s2 , z2 ) . The point v is depicted in Figure 4.2 below.
I1
s2
I2
v
s1 s
z1 z
z2
Figure 4.2
The expected type between s1 and s2 is v
s1G ( s1 ) s2 [G ( s2 ) G ( s1 )]
.
G ( s2 )
Proposition 1: The Pareto dominant separating equilibrium satisfies the LCT if and only
if for all n , v v .
Proof: Note that only points in the shaded areas in Figures 4.1 and 4.2 are preferred by
both types of sn and sn1 ( s1 and s2 ) to their respective equilibrium points. If v v , then
there is no signal between zn and z n1 ( z1 and z2 ) to which both types of sn and sn1 ( s1
and s2 ) are willing to deviate if the receiver has the perception of v . So the LCT is
satisfied. On the other hand, if the LCT is satisfied, then it must be the case that v v .
Otherwise, it is clear from Figures 4.1 and 4.2 that there are signals that both types
of sn and sn1 ( s1 and s2 ) are willing to deviate to but other types do not.
16
Q.E.D
The idea of Proposition 1 is simple. For both interior points and boundary points,
v is the minimum perception by the receiver such that the two types sn and sn1 can find
a common profitable deviation that is not attractive to any other types. The receiver’s
correct perception about the pool of sn and sn1 is v . If v v for all n , then no pair of
types can find a local pooled deviation such that under the correct perception by the
receiver, it is profitable only to them but not any other type. If that is the case, the LCT is
satisfied by the Pareto dominant separating equilibrium.
Proposition 1 can be used to check the existence of equilibrium satisfying the
LCT in any finite type model. Let us return to the continuous type signaling model
introduced in Section 2 in which the type space is S [ s , s ] with a smooth distribution
function G ( s ) . We study the following discrete type version where s1 s , si 1 si ,
sN s and
ss
. We let N 2k 1 for k 2 , that is, as k increases by one, each
N 1
interval is divided into two even ones. We are interested in the limit case when k ,
or 0 , as an approximation of the continuous type case.
To simplify our analysis, we make the following technical assumptions, though
these assumptions are not necessary for the general idea of our LCT to work.
B1: U12 0 for all ( s, sˆ, y ) ;
B2: U 22 0 for all ( s, sˆ, y ) .
It is easy to check that the Spence education signaling model satisfies both conditions,
but the advertising signaling model does not. However, in the next Section, we will show
that our method can be easily applied to the advertising signaling model to get similar
characterization results.
Consider interior types first. For any k and n {2,3,...2k 1} , fix sn = s . As k
increases, let sn1 and sn 1 be the nearest types to s , so sn- 1 = s - d(k ) and
sn+ 1 = s + d(k ) . Let v ( s, ) v E[ s | s sn or sn 1 ] , and v ( s, ) be the solution to (2.5)
17
Lemma 1: When 0 , (i) v ( s, ) s ; (ii) v2 ( s, )
1
G "( s )
; (iii) v22 ( s, )
.
2
2G '( s )
Proof: See the Appendix.
Lemma 2: Suppose conditions B1 and B2 hold. When 0 , (i) v ( s, ) s ; (ii)
v2 ( s, d) ®
1
U U U U 2U 3U133 2U 3U13U 23 2U 32U113 4U 3U132
; (iii) v22 ( s, ) 2 13 33
.
2
4U 32U13
Proof: See the Appendix.
For the boundary type s , let v ( s , ) be the solution to U ( s , v( s , ), z)
U ( s , s , z2 ) , where z2 is such that U ( s , s , z ) U ( s , s , z2 ) . Let v ( s , ) be
sG ( s ) ( s )[G ( s ) G ( s )]
. Note that if G ( s ) 0 , then v ( s , ) s for all ,
G( s )
which means that v( s , ) v ( s , ) and hence the condition of Proposition 1 is violated.
However, in the discrete type case, G ( s ) 0 means that s should not be considered at all.
Thus, we suppose G ( s ) 0 . We have
Lemma 3: Suppose conditions B1 and B2 hold. When 0 , (i) v ( s , ) s ,
v2 ( s , ) 0 , and v22 ( s , )
v22 ( s , )
2G '( s )
; (ii) v ( s , ) s , v2 ( s , ) 0 , and
G( s )
2U13 ( s, s, z )
.
U 3 ( s, s, z )
Proof: See the Appendix.
From Lemmas 1-3, we have our main characterization result for the limiting
discrete type case.
Theorem 1: Suppose conditions B1 and B2 hold. When 0 , the Pareto dominant
separating equilibrium of the discrete type model satisfies the LCT if
18
(i)
for any s ( s , s ] ,
U 2U13U 33 U 2U 3U133 2U 3U13U 23 2U 32U113 4U 3U132 G( s )
2U 32U13
G( s )
(ii) G ( s ) 0 and
U13 ( s, s, z ( s )) G ( s )
.
U 3 ( s, s, z ( s )) G ( s )
(2.7)
(2.8)
The intuition for Theorem 1 is easy to understand. Consider the consulting
example discussed in Section 2, where we showed that one reason for non-existence is
that the type distribution is tilted upwards too much. Another reason for non-existence is
how the different curves differ across types. Since the marginal rate of substitution
between signal z and perception v is similar for the different types in that example, the
indifference maps are similar and so indifference curves are close together. As a result,
both types are better off deviating to ẑ if the receiver believes that both may be choosing
to deviate, thus violating the requirement of no credible deviation. However, if the
marginal rate of substitution declines sufficiently rapidly with type, the indifference
curve I 2 in Figure 4.1 will be everywhere above v , the average type. Now only type s1 is
better off deviating to ẑ if the receiver still thinks that both types may be deviating,
making the deviation-perception pair not credible.
Intuitively, the rate at which the marginal rate of substitution declines with s is a
measure of signaling effectiveness. Thus Theorem 1 suggests that when signaling
effectiveness is sufficiently large, the separating equilibrium will survive the LCT. This
intuition is reflected in conditions (2.7) and (2.8). Note that the slope of the indifference
map is given by MRS ( s, s, z ( s ))
U 3 ( s, s, z ( s ))
, and by Assumption B1,
U 2 ( s, s, z ( s ))
U U
U13
. The LHS of (2.8) can be rewritten as 13 2 , which
MRS ( s, v, z(v ))
U3 U 2
s
U2
vs
measures how rapidly the MRS declines with s at s (normalized at the level of MRS
itself). Figuratively, when the LHS is greater, the indifference curve I 2 is far from I1 in
Figure 4.1, hence there will be no credible deviation with the perception at v . The RHS
of (2.8) is the density function of s , normalized by the probability mass at s . Clearly,
19
the smaller this ratio, the smaller the perception of a pool involving s . When the expected
value of the two types, v , is lower in Figure 4.1, there will be no credible deviation.
The intuition for (2.7) is similar, though less transparent. The last term of the LHS
(over the denominator),
2U13
, has exactly the same interpretation: a measure of how
U3
rapidly the MRS declines with s . From Figure 4.1., the critical value of v depends on
how rapidly the curve U n 1 increases with v and how slowly the curve U n 1 increases
with z . Note that
U 23
by Assumption B2 and
MRS ( s, v, z( s))
v
U
vs
2
U 33U 2 U 3U 23
MRS ( s, s, z )
. The first and third terms in (2.7) can be rewritten as
z
(U 2 )2
U13 (U 3U 23 U 2U 33 ) U 3U13U 23
U U U U
U
MRS z MRS v
3 23 2 2 33 23
2
2U 3U13
2U 3
2U 3
MRS 2
MRS
Figuratively, when the curve U n 1 is more straight-up (large MRS v ) and the curve
U n 1 is more flat (small MRS z ), there will be no credible deviation with the
perception at v . The RHS of (2.7) is the concavity of the distribution function of s , G ( s ) ,
normalized by its density function. Intuitively, the more concave G ( s ) is (i.e., the smaller
G is), the more probability mass on smaller s in any set of types, thus the smaller the
expected value of any set of types. Consequently, the smaller G is, the less likely a
deviation is credible.
In summary, Theorem 1 says that the Pareto dominant separating equilibrium will
satisfy the LCT if signals are effective in distinguishing types (i.e., MRS declining fast
with types) and the type distribution is not too tilted upwards.
5.
Continuous Type Case
In this section we derive conditions under which an equilibrium satisfies the LCT
in the continuous type case. We show that the results here are exactly the same as those
in the limiting discrete type case studied in the preceding section.
20
As in the discrete type case, we can focus on separating equilibria. Consider any
separating equilibrium z ( s ) : S [ z , z ] Y . Consider any signal ŷ Y .
(L1): When ŷ z , ( yˆ , s ) is a credible deviation if U ( s , s , z ) U ( s , s , yˆ ) .
(L2): When ŷ z , ( yˆ , s ) is a credible deviation if U ( s , s , z ) U ( s , s , yˆ ) .
(L3c): When yˆ [ z , z ] , let z ( s0 ) yˆ and consider a small neighborhood of s0 , S0 S .
Let sˆ E[ s | s S0 ] . If
(i) U (s, sˆ, yˆ ) U (s, s, z (s)), for all s int So .
(ii) U ( s, sˆ, yˆ ) U ( s, s, z( s)), for all s So .
Then the signal-perception ( yˆ , sˆ) is credible.
By the definition of the Local Credibility Test given in Section 2, if there does not
exist any credible signal-perception, then the separating equilibrium z ( s ) survives the
LCT.
Requirements (L1) and (L2) are exactly the same as in the finite type case. In the
continuous type case, the results of Riley (1979) and Mailath (1987) show that there is a
unique separating equilibrium if the lowest type sender chooses the signal that is optimal
under complete information. It is easy to see that this Pareto dominant separating
equilibrium is the only equilibrium that satisfies (L1) and (L2). Therefore, to check
whether there exists an equilibrium satisfying the LCT, we only need to check whether
this equilibrium satisfies Requirement (L3c).
Requirement (L3c) is the counterpart of (L3) in the discrete case. In the
continuous type case, any signal yˆ [ z , z ] is “on-equilibrium,” so Requirement (L4) in
the discrete case does not apply. However, thinking of the continuous type case as the
limit of the discrete type case with many very close types, it is easy to understand how an
“on-equilibrium” signal can be alternatively interpreted as a deviation signal and how to
check credibility of such deviations. Consider any “on-equilibrium” signal ŷ , and
suppose the type of sender for this signal in the separating equilibrium is s0 . Suppose in a
discrete type version of the model, s0 (sn , sn1 ) for some n . Suppose the nearby types
s S0 (sn , sn1 ) all deviate to this signal, and this is correctly perceived by the receiver
21
and so the perception of the average type is ŝ . Requirement (L3c) says that if given the
perception ŝ , all the deviating types can gain relative to their equilibrium payoffs while
all other types cannot, then those nearby types can credibly deviate to the particular “onequilibrium” signal. If a separating equilibrium does not allow any such credible
deviations, then it satisfies the LCT. As mentioned in the Introduction, another way of
thinking about on-equilibrium deviations is as follows. If for an on-equilibrium signal
there is such a deviation-perception pair ( yˆ , sˆ) as described in (L3c), then those nearby
types can credibly deviate to ŷ by throwing away a small amount of money. Since other
types will not gain by mimicking, throwing away money by types in S 0 can signal to the
receiver that they are the types deviating to ŷ .
Since the continuous type case is viewed as an approximation of the case of many
close discrete types, we only need to check whether there are any credible interior
deviations and any credible boundary deviations for very small intervals, in the sense that
will be made precise below.
Consider interior deviations first. For any two types s s , suppose those in the
interval [ s, s] pool at a certain signal y . Let v ( s, s) be the expected type of this pool:
s'
v ( s, s)
s
xdG ( x)
G ( s) G ( s )
. Let v ( s, s) [ s, s] and y ( s, s) Y be a solution to
U ( s, v, y ) U ( s, s, z ( s))
U ( s, v, y ) U ( s, s, z ( s))
(3.1)
The point ( y ( s, s), v ( s, s)) is depicted below in Figure 5.1. Given this signal-perception
pair, all those types in [ s, s] prefer the pool to their separating equilibrium payoff.
22
I s
Is
s
z (s)
( y, v)
( z ( s), s)
( z ( s ), s )
z
Fig. 5.1: Pool of types in [ s, s]
The types in [ s, s] cannot find a credible deviation defined in (L3c) if and only if
the signal-perception pair of ( y ( s, s), v ( s, s)) is not credible. Therefore, the separating
equilibrium z ( s ) satisfies (L3c) only if for any s [s, s ) and s s , v ( s, s) v ( s, s) as
s s . Note that for any s [s, s ) , v ( s, s) v( s, s) s . Furthermore, we have
Lemma 4: For any s [s, s ) , (i) v2 ( s, s) 1/ 2 ; (ii) v22 ( s, s)
1 G ''( s)
.
6 G '( s)
Proof: See the Appendix.
Lemma 5: Suppose conditions B1 and B2 hold. For any s such that U 3 ( s, s, z ( s)) 0 ,
(i) v2 ( s, s) 1 2 ; (ii) v22 ( s, s)
U 2U13U 33 U 2U 3U133 2U 3U13U 23 2U 32U113 4U 3U132
12U 32U13
Proof: See the Appendix.
We now consider the boundary deviations of the following kind. For any type
s s , suppose those in the interval [s, s] all choose z z( s) , the equilibrium signal by
s . Let v ( s, s) be the expected type of this pool. Suppose G ( s ) 0 , we have
23
s'
v ( s, s)
s G ( s ) xdG ( x)
s
(3.2)
G ( s)
Let v( s, s) [s, s] be a solution to
U (s, v, z) U (s, s, z(s '))
(3.3)
In order for the separating equilibrium characterized by z ( s ) to satisfy the LCT, it
must be that for s close to s , any such signal-perception pair of ( z, v ( s, s)) is not
credible. That is, v ( s , s) v( s, s) as s s . Note that v ( s, s) v( s, s) s .
Lemma 6: Suppose conditions B1 and B2 hold. (i) Suppose G ( s ) 0 . Then,
v2 ( s, s) 0 , v22 ( s, s)
U ( s, s, z ( s ))
G '( s)
; (ii) v2 ( s, s) 0 , and v22 ( s, s ) 13
.
U 3 ( s, s, z ( s ))
G( s)
Proof: See the Appendix.
Theorem 2 below follows immediately from Lemmas 4 to 6.
Theorem 2: Suppose conditions B1 and B2 hold. The Pareto dominant separating
equilibrium z ( s ) in the continuous type model satisfies the LCT if
(i)
for any s ( s , s ] ,
U 2U13U 33 U 2U 3U133 2U 3U13U 23 2U 32U113 4U 3U132 G( s )
2U 32U13
G( s )
(ii)
G ( s ) 0 and
U13 ( s, s, z ( s )) G ( s )
.
U 3 ( s, s, z ( s )) G ( s )
(3.4)
(3.5)
Therefore, Theorems 1 and 2 show that the concept of the LCT can be applied to
the continuous type model exactly as in the discrete type model. While the continuous
type model is easier to work with analytically in terms of charactering the separating
equilibrium, it should be viewed as an approximation of the situation with many close
discrete types. Our position is that it should be subject to the same scrutiny of credibility
as discrete type models, even though signals are literally “on-equilibrium” in the
24
continuous type model. The equivalence of Theorems 1 and 2 demonstrates that this
approach is valid.
We want to make several remarks about the condition that G ( s ) 0 . Note that
when G ( s ) 0 , it can be shown that as s s , v2 ( s, s¢) ® 1/ 2 . By Lemma 6, in the
neighborhood of s , v ( s, s) v( s) , hence there is always a credible boundary deviation
at the lowest signal y z ( s ) . Thus, the condition G ( s ) 0 is necessary for the LCT.
This condition is completely natural in the discrete type case. Viewing the continuous
type case as an approximation of the discrete type case, we can think of this condition as
requiring that smoothing out the probability masses of all other types except for type s .
Another way of justifying G ( s ) 0 is as follows. Imagine that for some
participation costs not modeled here, there are some types slightly lower than s who do
not actively participate in the market. As can be seen from Figure 4.2, while those types
do not find the signal-perception pair ( z , s ) attractive, they may well find the signalperception pair ( z , v) profitable and thus would like to join the pooling deviation. Thus,
when we consider a possible boundary deviation, the existence of these types slightly
lower than s will affect the perception of the receiver as if there were an equivalently
probability mass on s .
Below we apply our results to the education signaling and the advertising
signaling examples introduced above.
Example 1 (continued): The Spence education signaling model
Since U ( s, sˆ, y ) sˆ C ( s, y ), the assumptions B1 and B2 are both satisfied. In
the common formulation of the model, U3 ( s, v, y ) C2 ( s, y ) 0 for all ( s, v, y ) .
Since U113 ( s, v, y ) C112 ( s, y ) and U133 ( s, v, y ) C122 ( s, y ) , condition (3.4) becomes
C 112
C
1C
C 1 G "( s)
2 12 22 122
C12
C2 2 C2 C12 C2 G '( s)
25
where all derivatives are evaluated at ( s, z ( s )) . Condition (3.5) is simply that G ( s ) 0
and
C12 ( s , y )
C2 ( s , y)
G( s )
. When these conditions hold, then the Pareto dominant
G( s )
separating equilibrium satisfies the LCT. In a simply case with C ( s, y ) = (a - b s ) y ,
where 0 measures how fast marginal cost of education y decreases in type s
and a > b s is a positive constant, the intuition of the conditions is very clear. The LCT
will be satisfied if the signal effectiveness measured by the marginal rate of substitution
C12 C2 ( A s) is large and the type distribution is not tilted upward too much.
Clearly, the greater is, the more likely the LCT is satisfied.
Example 2 (continued): The advertising signaling model
From the firm’s payoff function, we have U12 = a (1- a ) / 2b and
U 22 = (1- a ) 2 / 2b . Since this model does not satisfy the assumptions B1 and B2, we
cannot apply Theorem 2 directly. However, using the same method, it is not difficult to
derive conditions under which the LCT is satisfied. We have the following result.
Proposition 2: In the advertising signaling model, the Pareto dominant separating
equilibrium satisfies the LCT if (i) G¢¢( s) < 0 for s > s , and (ii) G( s ) > 0 and
a /( s - c) > G¢( s ) / G( s ) .
Proof: See the Appendix.
Because of the quadratic function form of the firm’s payoff function and other
special features of this model (e.g., many cross derivatives are zero), the measure of
signal effectiveness is constant and equals zero. So for the condition of no credible
interior deviations, it all depends on the type distribution. Proposition 2 also says that for
the boundary deviations not to be credible, the proportion of informed consumers must be
relatively large. This is intuitive. Since informed consumers will not be fooled by
deviations in advertising, more of informed consumers reduces the incentives to deviate
and makes the separating equilibrium more likely to satisfy the LCT.
26
A special case commonly studied in applications is when the type is uniformly
distributed. Then G 0 for s > s . It can be shown that as s ' s , all higher order partial
derivatives of v ( s, s) and v ( s, s) with respect to s are zero, which implies that in the
limit, v( s, s) v ( s, s) . So this is really a knife edge case. By our definition, however, the
LCT is not satisfied.
6.
Interior Optimum for the Lowest Type
So far we have assumed that U 3 ( s, s, z ( s)) 0 for all s . When the signal is
partially productive, this assumption may not hold. Then the perfect information optimal
choice for the lowest type, z* ( s ) arg max yY U ( s , s , y) , may be an interior optimal
solution, which implies that U 3 ( s , s , z * ( s )) 0 . In this case, Theorems 1 and 2 do not
hold any more. To illustrate the problem, consider the following example.
Example 3: The price signaling model
This example is also adopted from Milgrom and Roberts (1986). The environment
is identical to that in the advertising signaling model, except that the firm uses prices
rather than advertising to signal its quality. Suppose the firm chooses price p , which
leads to a perception of ŝ by the uninformed consumers. Then the firm’s profit is
( p c)( qI (1 )qU ) . Consider a possible separating signaling schedule p( s) . The
firm’s payoff function is
( s, sˆ, p) ( p c)( s (1 ) sˆ p) / b
It can be checked that this model satisfies the standard assumptions and assumptions B1
and B2. By the standard result, a separating equilibrium satisfies
z ( s )
U 2 ( s, s, z ( s )) (1 )( p c)
U 3 ( s, s, z ( s ))
2p s c
27
However, for the lowest type, the full information optimal price is chosen so that
U ( s , s , p( s )) = 0 , which gives p* = ( s + c) / 2 . To check interior deviations, for s s ,
3
condition (3.4) becomes:
p( s )(1 + 3a ) - 2a c - s(1 + a ) G ¢¢( s )
>
G ¢( s )
(2 p - c - s )2
(4.1)
For s close to s , it can be checked that the nominator on the LHS is negative, hence the
LHS goes to negative infinity. This shows that the Pareto dominant separating
equilibrium fails the LCT around the lower boundary point.
The above “lower endpoint” problem can be overcome if we modify the model so
that there is a significant fixed cost to enter the market. If the fixed cost is greater than the
maximum profit the lowest type can get, the lowest type and all the types lower than a
certain threshold will stay out of the market. Then for the lowest type that does enter the
market, it cannot choose its complete information optimal price. Otherwise, some of the
lower types would find it profitable entering the market mimicking it. With this type of
truncation of the type distribution by entry costs, it is again the case that U3 0 for all
the types signaling in the market so Theorem 2 applies.
7.
Concluding Remarks
Except in the special case of perfect correlation between the sender’s true type
and the value to the signal receiver, standard refinements (Intuitive Criterion, Divinity,
Stability) are not applicable. We argue that to have any “bite” at all, a refinement is
needed in which the signal receivers take into account the way sender types are
distributed. We then propose a Local Credibility Test which is somewhat stronger than
the Cho and Kreps Intuitive Criterion but milder than the Grossman-Perry Criterion. For
a class of models which includes the Spence education signaling model and the
advertising signaling model, we provide conditions under which the Pareto dominant
separating equilibrium satisfies the LCT. These conditions are the more likely to be met,
(a) the less rapidly the density increases or the more rapidly the density decreases with
type, and (b) the more rapidly the marginal cost of signaling decreases with type.
28
What is the “right” equilibrium when our conditions are not met? This is a
challenging question for which we have no satisfactory answer. As can be seen from the
simple two-type model depicted in Figure 2.2, our LCT test and the even stronger
Grossman and Perry SIC show that the Pareto dominant separating equilibrium is not
reasonable. But at the same time, all other equilibria are “killed” as well.
We conjecture that pooling or partial pooling must be a part of any more complete
analysis of signaling. To make the point as starkly as possible, let p1 be the probability
that a sender is low type. With p1 0 , the high type does not have to signal at all. As long
as p1 is positive, the high type has to take costly signaling to separate herself from the
low type. Thus the separating equilibrium has an extreme discontinuity at p 0 . When
p is close to zero, the pooling outcome seems more reasonable than the highly inefficient
separating equilibrium. That is, “reasonable” out-of-equilibrium beliefs do not
necessarily lead to reasonable outcomes.
29
Appendix A: Proofs
Proof of Lemma 1: Using sn = s, sn- 1 = s - d, sn+ 1 = s + d , we rewrite (2.6) as follows:
v ( s, )(G( sn1 ) G( sn1 )) [G( s) G( sn1 )]s [G( sn1 ) G( s)]sn1
Differentiating with respect to on both sides, we have
v2 ( s, )[G( sn1 ) G( sn1 )] v ( s, )[G( sn1 ) G( sn1 )] sG( sn1 ) sn1G( sn1 ) G( sn1 ) G( s)
v22 ( s, d)[G( sn+ 1 ) - G( sn- 1 )] + 2v2 ( s, d)[G ¢( sn+ 1 ) + G ¢( sn- 1 )] + v ( s, d)[G ¢( sn+ 1 ) - G ¢( sn- 1 )]
= - sG¢¢( sn- 1 ) + sn+ 1G ¢¢( sn+ 1 ) + 2G ¢( sn+ 1 )
v222 ( s, d)[G ( sn+ 1 ) - G ( sn- 1 )] + 3v22 ( s, d)[G ¢( sn+ 1 ) + G ¢( sn- 1 )]
+ 3v2 ( s, d)[G ¢¢( sn+ 1 ) - G ¢¢( sn- 1 )] + v ( s, d)[G ¢¢¢( sn+ 1 ) + G ¢¢¢( sn- 1 )]
= sG ¢¢¢( sn- 1 ) + sn+ 1G ¢¢¢( sn+ 1 ) + 3G ¢¢( sn+ 1 )
Letting 0 we obtain: v ( s, ) s; v2 ( s, ) 1/ 2; v22 ( s, )
G "( s)
.
2G '( s)
Q.E.D
Proof of Lemma 2: First by the continuity of U we have v( s,0) = s from (2.5).
Differentiating (2.5) with respect to , we have
U1 ( sn 1 , v, y ) U 2 ( sn 1 , v, y )
U1 ( sn 1 , v, y ) U 2 ( sn 1 , v, y )
dv
dy
U 3 ( sn 1, v, y )
U1 ( sn 1, sn , zn )
d
d
dv
dy
U 3 ( sn 1 , v, y )
d
d
dz
U1 ( sn 1 , sn 1 , zn 1 ) U 2 ( sn 1 , sn 1 , zn 1 ) U 3 ( sn 1 , sn 1 , zn 1 ) n 1
d
0 U 2 ( sn , sn 1 , zn 1 ) U 3 ( sn , sn 1 , zn 1 )
dzn 1
d
(6.1)
(6.2)
(6.3)
30
To save on notation, let z dzn 1 / d . From (6.3) we have
z ¢= -
U 2 ( sn , sn+ 1 , zn+ 1 )
U 3 ( sn , sn+ 1 , zn+ 1 )
(6.4)
We can obtain the higher order derivatives for zn 1 :
z
d 2 zn 1
U (U U 2U U )
2 2 33 3 3 23
2
d
U3
(6.5)
d 3 zn 1
U
2
z
25 6U 32U 23
9U 2U 3U 23U 33 3U 22U 332 3U 2U 32U 233 U 22U 3U 333
3
d
U3
(6.6)
where U U ( sn , sn1, zn1 ) .
Write v¢= dv / d d = v2 ( s, d) and y ¢= dy / d d = y2 ( s, d) . From (6.1) and (6.2) we have
v
1
and y
2
where
(6.7)
U 2 ( sn1 , v, y )U3 ( sn1, v, y ) U 2 ( sn1, v, y )U 3 ( sn1, v, y )
1 U 3 ( sn 1 , v, y )[U1 ( sn 1 , v, y ) U 1 ( sn 1, sn , zn )]
U 3 ( sn 1 , v, y )[U 1 ( sn 1, sn 1, zn 1 ) U1 ( sn 1, v, y ) U 2 ( sn 1, sn 1, zn 1 ) U 3 ( sn 1, sn 1, zn 1 ) z ]
2 U 2 ( sn 1 , v, y )[U 1 ( sn 1 , sn 1 , zn 1 ) U1 ( sn 1 , v, y ) U 2 ( sn 1, sn 1, zn 1 ) U 3 ( sn 1, sn 1, zn 1 ) z ]
-U 2 ( sn 1, v, y )[U1 ( sn 1, v, y ) U 1 ( sn 1, sn , zn )]
Differentiating the above equations, and using B1, B2 and (6.4) - (6.6), we can
derive the following derivatives evaluated at d = 0 :
D ¢¢=
1
d
| 0 2U 2U13
d
d 2D
|d= 0 = 4(U13U 23 + U 2U133 ) y ¢
d d2
d 1
| 0 2U 3U13 y 2U 2U13
d
31
d 2 1
1
| 0 2(U13 U 23v U 33 y )U13 y U 3 [U113 y ( U113 U133 y ) y U13 y ]
d 2
2( U13 U 23v U 33 y )[U13 ( z y ) U 23 z (U13 U 23 U 33 z ) z U 3 z ]
U 3[U113 ( z y ) (U113 U133 z ) z U13 z (U113 U133 y ) y U13 y
U 233 z2 U 23 z (U13 U 23 U 33 z ) z
(U113 2U133 z 2U 233 z U 333 z2 U 33 z) z U 3 z (U13 U 23 U 33 z ) z ]
2
d 2
U 2U
| 0 2 2 13 2U 2U13v
d
U3
d 2D
¢
¢
D2 =
|d= 0 = 2U 23 y ¢[(2U13 + 2U 23 + U 33 z ¢) z ¢+ U 3 z ¢¢- 2U13 y ¢]
d d2
+ U 2 [(3U113 + (3U133 + 3U 233 + U 333 z ¢) z ¢+ U 33 z ¢¢) z ¢+ (3U13 + 3U 23 + 2U 33 z ¢) z ¢¢
+ U 3 z ¢¢¢- 2U133 y ¢2 - 2U13 y ¢¢] + (U 233 y ¢2 + U 23 y ¢¢)(U 2 + U 3 z ¢)
Using L’Hopital’s rule, we have
2U 3U13 y 2U 2U13
U
1 3 y
v 1
2U 2U13
U2
U
2 2U 22U13 2U 2U13 y
2 y
y
2U 2U13
U3
which implies v v2 ( s,0) 1/ 2 and y y2 ( s,0) U 2 / 2U 3 . Taking second order
derivatives, we have
d 2v
d 1 d 1 / d (dv / d ) (d / d )
2
d
d
d2y
d
2
d
d
2 d 2 / d (dy / d ) (d / d )
Using L’Hospital’s rule again we have
ìï
ïï
ïï v 22 ( s,0) =
ïí
ïï
ïï y ( s,0) =
ïï 22
î
d 2v
D ¢¢- v ¢¢×D ¢- v ¢×D ¢¢
| = 1
2 d= 0
dd
D¢
d2y
D ¢¢- y ¢¢×D ¢- y ¢×D ¢¢
| = 2
2 d= 0
dd
D¢
32
(6.8)
Substituting the expressions of v , y , , , 1 , 2 derived above into (6.8), we can
solve for values of v22 ( s,0) as follows:
v v22 ( s,0)
U 2U13U 33 U 2U 3U133 2U 3U13U 23 2U 32U113 4U 3U132
4U 32U13
Q.E.D.
Proof of Lemma 3: In Figure 4.2, the following conditions hold:
U ( s , s , z ) U ( s , s , z2 )
U ( s , v( s , ), z ) U ( s , s , z2 )
(6.9)
The expected type of s and s is
v ( s , )
sG ( s ) ( s )[G( s ) G( s )]
G( s )
(6.10)
Obviously when 0 , we have v ( s ,0) lim v ( s , ) s . Multiplying G ( s ) on
0
both sides of (6.10), and differentiating with respect to , we have
G( s )v ( s , ) G( s )v2 ( s , ) G( s )( s ) G( s ) G( s ) (6.11)
Letting 0 we have v2 ( s ,0) 0 as G ( s ) 0 . Now differentiating (6.11) once more
and letting 0 , we obtain
v22 ( s ,0)
2G( s )
G( s )
From (6.9) we first have v v ( s ,0) s by the continuity of U . Differentiating (6.9)
with respect to , and denote z dz2 / d and v dv( s, ) / d , we have
0 U ( s, s , z ) U ( s, s , z ) z
2
2
3
2
U1 ( s , s , z2 ) U 2 ( s , s , z2 ) U 3 ( s , s , z2 ) z
U1( s , v, z) U 2 ( s , v, z) v
(6.12)
Letting 0 we have v v2 ( s,0) 0 as U 2 0 . Differentiating (6.12) once more and
evaluating at 0 we obtain
33
v ¢¢= v22 ( s,0) = -
2U13 ( s, s, z )
U 3 ( s, s, z )
Q.E.D.
s
Proof of Lemma 4: By definition, v ( s, s) 1 [G ( s) G ( s)] xdG ( x) . Multiplying
s
both sides by G ( s) G ( s ) and then differentiating by s , we have
v2 ( s, s)(G( s) G( s)) v ( s, s)G( s) sG( s) .
Differentiating by s again,
v22 ( s, s)(G( s) G( s)) 2v2 ( s, s)G( s ') v ( s, s)G( s) G( s) sG( s)
(6.13)
Setting s s , it follows immediately that v2 ( s, s) 1/ 2 .
Differentiating (6.13) by s again,
v222 ( s, s)(G( s) G( s)) 3v22 ( s, s)G( s) 3v2 ( s, s)G( s) v ( s, s)G( s) 2G( s) sG( s)
1 G( s )
Since v ( s, s ) s and v2 ( s, s) 1/ 2 , setting s s we obtain v22 ( s, s )
. Q.E.D.
6 G( s )
Proof of Lemma 5: Total differentiating (3.1) gives
U1 ( s¢, v, y )ds¢+ U 2 ( s¢, v, y )dv + U 3 ( s ¢, v, y )dy = U1 ( s ¢, s ¢, z ( s ¢))ds ¢
U 2 ( s, v , y )dv + U 3 ( s, v , y )dy = 0
Solving the equations, we have
dv D 1
=
,
ds¢ D
dy D 2
=
ds¢ D
D = U 2 ( s¢, v, y )U 3 ( s, v, y ) - U 2 ( s, v, y )U 3 ( s ¢, v, y ),
D 1 = U 3 ( s, v, y )[U1 ( s¢, s¢, z ( s¢)) - U1 ( s¢, v, y )],
D 2 = - U 2 ( s, v, y )[U1 ( s¢, s¢, z ( s ¢)) - U1 ( s ¢, v, y )].
Under Assumption B1, we have
dy D 2 U 1 ( s¢, v, y ) - U1 ( s¢, s¢, z( s¢))
=
=
ds¢ D
U 3 ( s, v, y ) - U 3 ( s¢, v, y )
Fix any s, as s¢® s. It must be that v s, z ( s) z ( s ), and y z ( s ) . For the
simplicity of notation, write v( s) v2 ( s, s) and y( s) y2 ( s, s) . Applying the
I’Hopital’s rule, as s s, we get
34
(6.14)
dy
ds s s
U 11 ( s, v, y ) U12 ( s, v, y )v ( s ) U13 ( s , v, y ) y ( s ) U11 ( s , s , z ( s )) U 12 ( s , s , z ( s )) U 13 ( s , s , z ( s )) z ( s )
s s
U 23 ( s, v, y )v ( s) U 33 ( s, v, y ) y ( s) U 23 ( s , v, y )v ( s ) U 33 ( s , v, y ) y ( s ) U 13 ( s , v, y )
U ( s, v, y ) y ( s) U13 ( s, s, z ( s )) z ( s)
= lim 13
s s
U13 ( s, v, y )
lim
z ( s )
dy
ds s s
Hence as s s,
dy
0.5z( s ) as long as z( s) U 2 ( s, s, z( s)) U 3 ( s, s, z( s)) is defined
ds
at s , or U 3 ( s, s, z ( s)) 0 at s .
Since
dv 11 11 dy
U ( s, v, y ) dy
3
ds
21 ds
U 2 ( s, v, y ) ds
(6.15)
we have
dv
U ( s, v, y ) dy
U ( s, s, z ( s ))
dy
lim 3
3
lim
s
s
s
s
ds s s
U 2 ( s, v, y ) ds
U 2 ( s, s, z ( s ))
ds
= 0.5
U 3 ( s, s, z ( s ))
z( s) 0.5
U 2 ( s, s, z ( s ))
for any s such that U 3 ( s, s, z ( s)) 0 . This proves part (i).
For part (ii), first note that from z( s) U 2 ( s, s, z( s)) U3 ( s, s, z( s)) ,
z( s )
U 22
U 2U 23 U 33 z ( s )
z( s ) 13
U3
U3
From (6.14), and by Assumption B1, we have
d2y
ds2
dy
U11 ( s, s, z ( s)) U13 ( s, s, z ( s)) z ( s)
ds
U 3 ( s, v, y ) U 3 ( s, v, y )
U 11 ( s, v, y ) U13 ( s, v, y )
U 33 ( s, v, y )
dy
dy
U 33 ( s, v, y )
U13 ( s, v, y )
dy
ds
ds
U 3 ( s, v, y ) U 3 ( s, v, y )
ds
U ( s, v, y ) U11 ( s, s, z ( s)) U 33 ( s, v, y ) U 33 ( s, v, y ) dy
11
U 3 ( s, v, y ) U 3 ( s, v, y )
U 3 ( s, v, y ) U 3 ( s, v, y ) ds
35
2
dy
U13 ( s, s, z( s)) z( s)
ds
U 3 ( s, v, y ) U 3 ( s, v, y )
2U13 ( s, v, y )
(6.16)
Let Li ( s, s) be the ith term on the right hand side of the above equation. For any
s such that U 3 ( s, s, z ( s)) 0 , it can be checked that
lim L1
s s
1 U 113 ( s, s, z ( s )) z ( s )
2 U13 ( s, s, z ( s ))
lim L2
s s
1 U 133 ( s, s, z ( s ))
[ z( s )]2
4 U13 ( s, s, z ( s ))
lim L3 z( s ) 2
s s
d2y
ds2
0.5
s s
U133 ( s, s, z ( s ))[ z ( s )]2
U13 ( s, s, z ( s ))
Therefore,
d2y
U ( s, s, z ( s)) 0.5U133 ( s, s, z ( s )) z ( s )
6 2
2 z( s) 113
z( s)
ds ss
U13 ( s, s, z ( s ))
From (6.15), and using Assumption B2, we have
d 2v
U 3 ( s, v, y ) d 2 y U 33 ( s, v, y ) 2U 3 ( s, v, y )U 23 ( s, v, y ) dy
ds
ds2
U 2 ( s, v, y ) ds2 U 2 ( s, v, y )
U 22 ( s, v, y )
As s s, we know that
2
(6.17)
dv
dy
0.5 and U 3 ( s, v, y )
0.5U 3 z ( s ) 0.5U 2 . So,
ds
ds
36
d 2v
ds2
s s
U 3 ( s, s, z ( s )) d 2 y
U 2 ( s, s, z ( s )) ds2
0.5
s s
U 23 ( s, s, z ( s )) 0.5U 33 ( s, s, z ( s )) z ( s )
z( s )
U 2 ( s, s, z ( s ))
2
d y
ds2 ss
U 0.5U 33 z( s )
0.5 23
z( s)
z( s )
U2
1 U 2U 23 U 33 z( s ) 1 U 113 0.5U133 z ( s )
U 0.5U 33 z ( s )
[ 13
]
0.5 23
z( s )
3
U3
6
U13
U2
1 U 2U 23 U 33 z( s )
1 U 113 0.5U133 z ( s )
U 0.5U 33 z ( s )
[ 13
z( s)]
0.5 23
z( s)
3
U2
6
U13
U2
1 U 113 1 4U13 2U 23 U133
1 U 33
[
]z( s)
[ z ( s)]2
6 U13 12
U2
U13
12 U 2
This proves part (ii).
Q.E.D.
Proof of Lemma 6: Multiplying both sides in (3.2) by G ( s) and then differentiating
by s , we have
v2 ( s, s)G( s) v ( s, s)G( s) sG( s)
Differentiating by s again, we have
v22 ( s, s)G( s) 2v2 ( s, s)G( s ') v ( s, s)G( s) G( s) sG( s)
Setting s s in the two equations above, we prove (i). Total differentiating (3.3) gives
U1 ( s, v( s, s), z ) U 2 ( s, v( s, s), z ) v2 ( s, s) U1 ( s, s, z( s))
Total differentiating once more gives
U11 ( s, v ( s, s), z ) U 2 ( s, v ( s, s), z ) v22 ( s, s) U11 ( s, s, z ( s)) U13 ( s, s, z ( s)) z ( s )
U ( s, s, z ( s))
U11( s, s, z ( s)) U13 ( s, s, z ( s)) [ 2
]
U 3 ( s, s, z ( s))
Taking limits in the two equations above, we get (ii).
Q.E.D.
Proof of Proposition 2: We consider the interior deviation first. Following the same
notation as in the main text of our paper, we have
37
U 3 ( s, v, y )[U1 ( s ¢, s ¢, z ( s ¢)) - U1 ( s ¢, v, y )]
dv D 11
=
=
ds ¢ D
U 2 ( s ¢, v, y )U 3 ( s, v, y ) - U 2 ( s, v, y )U 3 (s ¢, v, y )
- (a / 2b)(1 - a )( s ¢- v)
- (1 - a ) / 2b ×a ( s ¢- s)
s ¢- v
=
s ¢- s
=
Using L’Hospital’s rule, we have v2 ( s, s) = lim
s¢® s
(6.18)
dv
dv
, which implies
= 1- lim
¢
s ® s ds ¢
ds¢
v2 ( s, s ) = 1/ 2. Differentiating (6.18) with respect to s ¢, we have
d 2 v (1- dv / ds ¢)( s ¢- s ) - ( s ¢- v )
=
ds ¢2
( s ¢- s ) 2
(6.19)
Using L’Hospital’s rule again, we have
d 2v
- d 2v / ds¢2 ( s¢- s )
1
d 2v
=
lim
=
lim
,
s ¢® s ds ¢2
s ¢® s
2( s¢- s )
2 s¢® s ds¢2
lim
which implies v22 ( s, s ) = 0 . Therefore, there is no credible interior deviation if
0 > G¢¢( s) / G¢( s) , or if G(×) is strictly concave.
Next consider lower endpoint deviation. From Figure 4.2 in the text, we have
U ( s ', v, z ) = U ( s¢, s¢, z( s¢))
Differentiating with respect to s ¢ we have
U1 ( s¢, v, z ) + U2 ( s¢, v, z ) ×v2 ( s , s¢) = U1( s¢, s¢, z(s '))
(6.20)
Letting s¢® s , we have v2 ( s , s ) = 0 . Differentiating (6.20) once more time and letting
s ¢® s , we have
v22 ( s , s ) =
a
s- c
Therefore, there is no lower endpoint deviation if G( s ) > 0 and
a /( s - c) > G¢( s ) / G( s ) .
Q.E.D.
38
Appendix B: Application to the reserve price signaling model
Cai, Riley and Ye (2003) and Jullien and Mariotti (2003) study the following
reserve price signaling model in auction settings. A seller of an indivisible good has
private information about certain characteristics of the good that the potential bidders do
not know. Let Rn be the seller’s information. The seller’s own valuation of the
good is s( ) , and the common value component of the bidders’ valuations is
t ( ) s( ) , where is a positive parameter. Bidder i ’s valuation is t xi , where x i is
the private value component that is known to himself only. The bidders’ private signals
{xi } are i.i.d. random variables with a distribution function F ( ) and an everywhere
positive density function f ( ) . Suppose the seller uses a sealed bid second price auction
to sell the good; and she sets a reserve price r . Let ŝ be the perceived type of the seller,
i.e., the perceived common value component in bidders’ valuations. Using a variable
transformation by defining the reserve markup m r sˆ , Cai, Riley and Ye (2003) show
that the seller’s expected payoff can be expressed as
U ( s, sˆ, m) sF(1) (m) sˆ(1 F(1) (m)) B(m)
where F(1) ( ) is the distribution function of the first order statistics and
x
B(m) m( F(2) (m) F(1) (m)) xdF(2) ( x) . Thus the model fits into the standard signaling
m
framework.5
To fit this into our signaling model, we adopt another variable transformation:
y F(1) (m) [0,1] , and let H ( y ) B(m( y )) . Then the seller’s expected payoff is
U ( s, sˆ, y ) sy sˆ(1 y ) H ( y )
It can be verified that
5
Cai, Riley and Ye (2003) study a much more general model with affiliated private signals of the bidders
and general valuation functions.
39
(m) J (m) F(1)
(m) J ( m( y ))
H ( y ) B(m) y (m) F(1)
( m)
H ( y ) J (m) F(1)
where J ( x ) x (1 F ( x )) / f ( x ) that is assumed to be strictly increasing in x .
With this transformation, the derivatives of U ( s, sˆ, y ) are
U1 ( s, sˆ, y ) y, U 2 ( s, sˆ, y ) 1 y, U 3 ( s, sˆ, y ) s sˆ H ( y )
U11 ( s, sˆ, y ) 0, U12 ( s, sˆ, y ) 0, U13 ( s, sˆ, y )
U 22 ( s, sˆ, y ) 0, U 23 ( s, sˆ, y ) 1, U 33 ( s, sˆ, y ) H ( y )
The standard assumptions and B1 and B2 are all satisfied. By the standard results,
a separating equilibrium satisfies
z ( s )
U 2 ( s, s, z ( s ))
1 z ( s)
U 3 ( s, s, z ( s ))
( 1) s H ( z ( s ))
We now analyze when this separating equilibrium satisfies the conditions of
Theorem 2. We focus on the special case t s, 1 . Suppose (1 )s J ( x ) so that
the separating equilibrium goes through m* ( s ) x at s . Since U3 (s, s, z (s))
(1 ) s J ( z ( s )) is decreasing in s , U3 ( s, s, z ( s)) (1 ) s J ( x) 0 for all s [s, s ] .
In this model, since U113 ( s, v, y ) U133 ( s, v, y ) 0 , condition (3.4) becomes
1
G( s)
,
[(4 2 ) z( s) H ( z( s))( z( s)) 2 ]
2 (1 z( s))
G( s)
Condition (3.5) requires that G ( s ) 0 and
( 1) s H ( z ( s))
40
G( s)
.
G( s)
References
Cai, Hongbin, John Riley and Lixin Ye (2003), “Reserve Price Signaling,” Working
Paper, UCLA.
Cho, In-Koo and Kreps, David M. (1987), “Signaling Games and Stable Equilibria,”
Quarterly Journal of Economics, 102, 179-221.
Cho, In-Koo and Sobel, Joel (1990), “Strategic Stability and Uniqueness in Signaling
Games,” Journal of Economic Theory, 50, 381-413.
Grossman, Sanford and Perry, Motty (1986a), “Sequential bargaining under Asymmetric
Information,” Journal of Economic Theory, 39, 120-154.
Grossman, Sanford J. and Perry, Motty (1986b), “Perfect Sequential Equilibrium,”
Journal of Economic Theory, 39, 97-119.
Jullien, B. and Mariotti, T. (2003), “Auction and the Informed Seller Problem,”
University of Toulouse Working Paper.
Kohlberg, Elon and Mertens, Jean-Franqis (1986), “On the Strategic Stability of
Equilibria,” Econometrica, 54, 1003-1037.
Mailath, George (1987), “Incentive Compatibility in Signaling Games with a Continuum
of Types,” Econometrica, 55:1349-1365.
Milgrom, Paul and Roberts, John (1986), “Price and Advertising Signals of Product
Quality,” Journal of Political Economy, 94:796-821.
Myerson, Roger B. (1981), “Optimal Auction Design,” Mathematics of Operations
Research, 6, 58-73.
41
Ramey, Garey (1996), “D1 Signaling Equilibria with Multiple Signals and a Continuum
of Types,” Journal of Economic Theory, 69, 508-531.
Riley, John (1975), “Competitive Signaling,” Journal of Economic Theory, 10, 174-186.
Riley, John G. (1979), “Informational Equilibrium,” Econometrica, 47, 331-359.
Riley, John G. (2001), “Silver Signals: 25 years of Screening and Signaling,” Journal of
Economic Literature, 39, 432-478.
Riley, John G. “Weak and Strong Signals” (2002) Scandinavian Journal of Economics,
104, 213-236.
Riley, John G. and William F. Samuelson, (1981), “Optimal Auctions,” American
Economic Review, 71, 381-392.
Rothschild, Michael and Stiglitz, Joseph (1976), “Equilibrium in Competitive Insurance
Markets: An Essay on the Economics of Imperfect Information,” Quarterly Journal of
Economics, 90, 629-649.
Spence, A. Michael (1973), “Job Market Signaling,” Quarterly Journal of Economics,
87, 355-379.
42