Formato Resumen CIO 2004 - Institut d'Organització i Control de
advertisement

EAGH applied to the assembly line balancing problem
Albert Corominas, Rafael Pastor
IOC - Institute of Industrial and Control Engineering
Technical University of Catalonia (UPC)
Avda. Diagonal, 647, 11ª planta
08028 Barcelona (Spain)
{albert.corominas/rafael.pastor}@upc.edu
EAGH applied to the assembly line balancing problem
An EAGH procedure was designed to solve the assembly line balancing problem known as
SALBP-1. Given a cycle time and the tasks required to produce one unit of product, together
with the times required for the different processes and the precedence relationships between
them, SALBP-1 consists in assigning the tasks to the workstations in order to minimise the
number of workstations.
In this problem the set of feasible decisions at iteration k , Dk , consists of the decision to
assign a specific task (from among those that have not yet been assigned and whose preceding
tasks have already been assigned) to a workstation that is being completed or, if no additional
tasks fit, to a new workstation. Six elementary greedy algorithms from the literature were
programmed, as they appear in Talbot et al. (1986), corresponding to the heuristic functions
h1 h( RPW j ) RPW j (Helgeson and Birnie, 1961), h2 h( NS j ) NS j (Talbot and
Patterson, 1984), h3 h(t j ) t j (Moodie and Young, 1965), h4 h( NIS j ) NIS j (Tonge,
1961),
h5 h( RPW j , NS j )
h6 h( NS j ,UB j , LB j )
NS j
RPW j
NS
j
UB j LB j
1
(Talbot
and
Patterson,
1984)
and
(Talbot and Patterson, 1984). The attributes a kj ,
corresponding to the decision j at iteration k are: RPW j , the ranked positional weight; NS j ,
the total number of follower tasks; t j , the task time; NIS j , the number of immediate follower
tasks; and LB j and UB j , the earliest and latest stations respectively to which task j may be
assigned.
The proposed heuristic function, which depends on a set of twelve parameters, , and which
defines the set of infinite heuristics, H , is the following:
h a kj , h( RPW j , NS j , t j , NIS j , LB j , UB j , 1 , 1 , 2 , 2 , 3 , 3 , 4 , 4 , 5 , 5 , 6 , 6 )
5
1
2
3
1 RPW j 2 NS j 3 t j 4 NIS j
with
4
RPW j
NS
5
6 j
NS j 1
UB j LB j
1 , 1 , 2 , 2 ,3 , 3 , 4 , 4 ,5 , 5 , 6 , 6 .
As
noted
above,
the
decision
This research was supported by projects DPI2004-03472, DPI2004-05797 and DPI2007-61905 (Ministerio de Educación y Ciencia, Spain,
and FEDER).
1
6
corresponding to iteration k is that which fulfils jk* arg max h a kj , .
jDk
In order to perform the computational experiment a set, I , of 2,000 instances was randomly
generated, and a subset T I of 1,000 instances was selected from it. The sets of instances
T and I \ T are used as the training set and the validation set respectively. Each member of
I has the following characteristics: between 50 and 150 tasks, according to a discrete,
uniform law; a precedence order strength between 0.5 and 0.9, according to a continuous,
uniform law; processing times for the tasks as integer values distributed uniformly between 5
and 50; and a cycle time equal to 1, 2 or 3 times the value of the time for the task with the
longest processing time.
Table 1 shows , which corresponds to the total number of stations for the 1,000 instances in
both the training set T and the validation set I \T for each of the six heuristic functions
h a kj . It also gives the number of times that a heuristic achieves the best results for the
validation set total compared to the other initial heuristics Best .
T
36,798
36,874
36,011
37,357
36,922
36,902
h1
h2
h3
h4
h5
h6
I \T
Best
37,066
505
37,130
466
36,267
966
37,584
364
37,126
504
37,152
464
Table 1. Sum of the number of stations for the six heuristic functions
From Table 1 it can be seen that h3 is the heuristic function which achieves the best results (in
both sets of instances) and that on average the I \ T set of instances requires a larger number
of workstations than the T set (this is only due to the randomness involved in generating set
I ).
Table 2 shows the results obtained when the function h a kj , is adjusted using the training
instances and is then applied to the 1,000 instances comprising the validation set. As a vertex
of the initial simplex in the N&M algorithm V0 , we took the values of the parameters, ,
h3 , which was
corresponding to
the best of the initial heuristics:
3 1;i 0, i 1,2,4,5,6; i 1, i 1,...,6 . However, in contrast we used several values for
the length of the edges of the regular hypertetrahedron which is constructed in N&M .
The sum of the number of stations for the instances in set T
is given.
V0
T ()
T () and set
I \ T I \T ()
I \ T ( )
h3
1
35,848
36,135
h3
2
35,842
36,110
2
h3
0.5
35,840
36,091
h3
0.1
35,833
36,083
Table 2. Sum of the number of stations for the adjusted heuristic function
As can be seen, the best heuristic which results from applying EAGH (with V0 h3 and
0.1), which we will name h3 _ 0.1 , represents an improvement of 184 workstations for the
instances of the I \ T set, compared with the results obtained with the best of the initial
heuristics, h3 .
When the calculation time necessary for executing the heuristics can be considered negligible,
as is the case with the heuristics proposed, it is effortless and usual apply all them and retain
the best solution thus obtained. In that case, it seems necessary to present additional
comparisons. If for each instance in I \ T the best result obtained by means of all the initial
heuristics is considered, then the total number of stations is 36,229; the heuristic provided by
EAGH achieves better results, since it needs 146 fewer workstations. If for each instance we
adopt the best of the solutions obtained applying all the initial heuristics and that provided by
EAGH, 36,016 stations are necessary; therefore, adding the heuristic furnished by EAGH to
the set of heuristics available to solve the problem reduces the number of workstations by
213.
Column ĥ h3 of Table 3 shows (separated by slashes) the number of instances in which the
heuristic resulting from applying EAGH, ĥ , achieves better results than h3 for the I \ T set,
the number of times h3 achieves better results than ĥ and the number of instances when the
results are the same. Column Sĥh gives the number of additional stations that ĥ requires in
3
the instances when h3 achieves a better solution and the number of additional stations that h3
requires in the instances when ĥ achieves the better solution. Column MS ĥ h shows the
3
maximum number of additional stations that ĥ requires in the instances when h3 achieves the
best solution and the maximum number of additional stations that h3 requires in the instances
when ĥ achieves the better solution. Columns hˆ h , S
and MS
provide the same
ini
hˆ hini
hˆ hini
information as that provided in the previous three columns but for the case when ĥ is
compared, for each instance, to the best of the six initial heuristics, hini .
ĥ V0 _
ĥ h3
Sĥh
h3 _1
163/62/775
62/194
1/4
142/71/787
73/167
3/4
h3 _ 2
186/64/750
64/221
1/3
162/70/768
72/191
3/3
h3 _ 0.5
203/67/730
68/244
2/4
178/71/751
74/212
3/3
h3 _ 0.1
197/61/742
61/245
1/4
175/65/760
67/213
3/4
3
Table 3. Results of comparing EAGH with
MS ĥ h
3
hˆ hini
Shˆ h
ini
MS hˆ h
ini
h3 and EAGH with the best initial heuristic for each instance
Table 3 confirms the good results obtained with EAGH, both with regard to the number of
instances in which ĥ achieves a better solution and with regard to the total number of
3
workstations saved. The greatest difference between hˆ h3 _ 0.1 and h3 when h3 achieves the
best solution is just one single workstation, while in the opposite case the difference can be as
many as 4 stations; the average number of additional workstations required when the heuristic
fares worse than its competitor is just 1 for ĥ but 1.24 for h3 .
If we analyse the results obtained for the I \ T set, we can see that in 273 instances the result
of the 6 initial heuristics and of the 4 functions which result from the application of EAGH
are the same. If we only consider h3 _ 0.1 , this figure increases to 283 instances. The 273
instances with the same result could be eliminated from the comparison, since analysing them
confirms that they are straightforward instances, for which any reasonable heuristic obtains
the same value for the objective function, which is probably optimum. The improvements
achieved with EAGH, therefore, correspond to the non-trivial instances in the I \ T set and
for these instances the relative decrease in the number of stations is greater than average and
the contribution of EAGH more significant.
The calculation time necessary to calibrate the function h a kj , , which depends on the value
of , and the number of iterations of the N&M algorithm, are between 13,762 and 20,702
seconds, and between 94 and 181 iterations respectively; we have also confirmed that the
calculation time (and the number of iterations) are not proportionally related to the quality of
the result. Specifically, for the heuristic function h3 _ 0.1 , 100 iterations were performed in
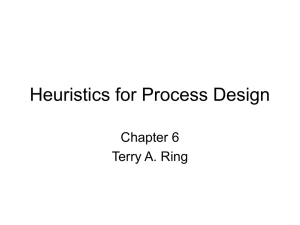
13,850 seconds. Figure 1 shows the evolution of the values T () and I \T () for this
function, compared with the number of iterations performed. As can be seen, the end
conditions imposed in the programmed version of the N&M algorithm (small spread in the
values of the function at its vertices and size of the hypertetrahedron) were very strict. With a
very small number of iterations, and thus in a shorter calculation time, a heuristic function
h a kj , could be adjusted and would provide considerable improvements: 88.20% of the
total improvement in the value of T () is achieved with 3 iterations, and 100% with 71.
Note that, even though T () monotonically decreases, I \T () does not (the algorithm
monotonically approaches a local optimum of T () , which does not take into account the
elements of I \ T ).
36.300
36.250
36.200
36.150
36.100
36.050
36.000
35.950
35.900
35.850
35.800
1
6
11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 101
Number of iterations
Set I\T
Set T
4
Figure 1. Evolution of the values of the functions
T ()
and
I \ T ( )
Finally, the heuristic function obtained by means of EAGH is:
h3 _ 0.1
0.00698 RPWj 0.960 0.00281 NS j1.032 1.04657 t j1.041 0.00004 NIS j1.026
1.021
RPW j
0.01219
NS j 1
1.006
NS
0.02237 j
UB j LB j
In the experiment described hitherto, the training set T includes 1,000 instances of the set I .
It seems likely that the results provided by EAGH are sensitive to the size of the training set.
To corroborate this supposition another experiment has been performed using as training sets
three subsets of T made up with, respectively, its 50, 200 and 500 first instances. The
resulting heuristics has been applied to the 1,000 instances of the validation set I \ T , with the
same values for the length of the edges of the regular hypertetrahedron that were used in the
preceding experiment. Tables 4 and 5 shows, respectively, the sum of the number of stations
for the instances in set I \ T corresponding to the diverse used training set and the respective
computing times required for the N&M algorithm to converge. As was expected, the
computing times are, roughly, proportional to the size of the training set and the quality of the
solutions improves when the size of the training set increases.
1
2
0.5
0.1
50
I \ T ( )
36,155
36,151
36,139
36,111
200
I \ T ( )
36,142
36,133
36,134
36,099
500
I \ T ( )
36,138
36,120
36,126
36,098
1,0000
I \ T ( )
36,135
36,110
36,091
36,083
Table 4. Sum of the number of stations with 50, 200, 500 and 1,000 instances in the training set
1
2
0.5
0.1
50
I \ T ( )
772
759
647
669
200
I \ T ( )
2,863
2,813
2,696
2,488
500
I \ T ( )
7,392
7,875
6,902
6,980
1,000
I \ T ( )
16,179
13,762
20,702
13,850
Table 5. Computing times, in seconds, for adjusting the parameters corresponding to the training sets including
50, 200, 500 and 1,000 instances
The function h a kj , was also adjusted taking the values of the parameters that
correspond to the second and third best initial heuristics h1 and h2 respectively as the vertex
of the initial simplex in the N&M algorithm, and considering values of 1 and 2 for the length
of the edges of the regular hypertetrahedron . The results achieved, although not of such
high quality as those achieved starting with h3 as the vertex of the initial simplex, are better
than those achieved with the initial heuristics (36,124; 36,149; 36,111 and 36,122 with h1 _1 ,
h1 _ 2 , h2 _1 and h2 _ 2 respectively). In both cases, 1 provides better solutions than
2 , and the times and number of iterations necessary for the adjustments are between
15,711 and 20,504 seconds, and between 117 and 177 iterations of N&M.
5
A short experiment has been performed to explore the conjecture stated at the end of Section
3 (i.e., that applying EAGH-1 to each instance may provide better solutions than those
obtained using the values of the parameters provided by EAGH when applied to the whole
training set). Every one of the 1,000 instances that constitute the validation set I \ T has been
solved with the six greedy algorithms from the literature and, taking as a vertex of the initial
hypertetrahedron corresponding to the best of the six heuristics, EAGH-1 has been applied,
using the four already mentioned values for the length of the edges of the initial simplex.
Table 6 shows the results and compares them with those obtained with EAGH-N. As can be
seen, the conjecture turns out to be true for the used set of instances.
1
2
0.5
0.1
(1):
EAGH-N
I \ T ( )
36,135
36,110
36,091
36,083
(2):
EAGH-1
I \ T ( )
35,913
35,894
35,928
35,920
(1) – (2)
222
216
163
163
Table 6. Sum of the number of stations obtained with EAGH-N and EAGH-1
References
Helgeson WB, Birnie DP. Assembly line balancing using the ranked positional weight
technique. Journal of Industrial Engineering 1961; 12; 394-398.
Moodie CL, Young HH. A heuristic method of assembly line balancing for assumptions of
constant or variable work element times. Journal of Industrial Engineering 1965; 16; 2329.
Talbot FB, Patterson JH. An integer programming algorithm with network cuts for solving the
assembly line balancing problem. Management Science 1984; 30; 85-99.
Talbot FB, Patterson JH, Gehrleiv WV. A comparative evaluation of heuristic line balancing
techniques. Management Science 1986; 32; 431-453.
Tonge FM. A heuristic program for assembly line balancing. Prentice-Hall: Englewood
Cliffs, NJ; 1961.
6