2. simulation model
advertisement

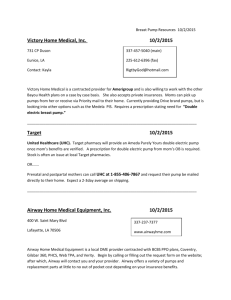
34th INTERNATIONAL CONFERENCE ON PRODUCTION ENGINEERING 28. - 30. September 2011, Niš, Serbia University of Niš, Faculty of Mechanical Engineering COMPARISON OF MODERN ELECTROHYDRAULIC SYSTEMS Tadej TAŠNER1,2, Darko LOVREC2 HAWE hidravlika d.o.o., Petrovče, Slovenia 2 Production Engineering Institute, Smetanova ulica, Maribor, Slovenia t.tasner@hawe.si, d.lovrec@uni-mb.si 1 Abstract: One of the main requirements of modern industrial systems is efficiency. Greater efficiency can be achieved by minimizing required energy, improving reliability and eliminating break-downs needed for maintenance. Due to increased usage of electrohydraulic systems in industrial applications, such systems have to be improved. Most of the systems use motor coupled with variable displacement pump. With cost-effective gear pumps driven by variable speed electric motor, another drive concept is becoming more popular. There are some questions posed by system designers: “What are the advantages and disadvantages of both concepts?” and “What would be the benefits when combining variable displacement pump with variable speed motor?”. All three systems will be described and compared by simulation results. Key words: electrohydraulics, variable speed drive, constant pump, variable displacement pump 1.INTRODUCTION Electrohydraulic systems are mostly used in machines or production lines which require big forces and power in order to operate as desired. Big forces result in big energy consumption which can be optimized by lowering loses in the electrohydraulic systems. Therefore, improved efficiency and reduced energy consumption are two of the main goals in modern electrohydraulic drive systems design. Hydraulic energy can be controlled in two main ways: with throttling principle (by throttling on the directional valve) or with volumetric principle (by adjusting the pump displacement volume). The throttling principle has good dynamic behaviour, but its energy losses are substantial. The volumetric principle is energy friendlier, but has worse dynamic response. [1] Due to better efficiency, the volumetric principle is mostly used. The hydraulic energy can be controlled by changing the flow and consequently pressure, which is achieved by adjusting the pumps’ displacement volume. This can be done directly by using a variable displacement pump or indirectly by using a constant displacement pump coupled with a speed controlled motor. The second, indirect, principle is becoming more and more popular due to low prices of constant gear pumps and frequency inverters that are used to control motor speeds. [2, 3] When thinking in the way of improving efficiency of the electrohydraulic system an idea of using variable speed motor and variable displacement pump arises (Figure 1). The main goals of this paper are to design a mathematical model and compare all three mentioned drive concepts by simulation results. The simulation results will give a rough estimation of performance differences between the drive concepts. The concepts will be evaluated by comparing settling time and overshoot of step response and ability to track a sine wave and a ramp. Q p DC Figure 1: Combined drive concept – variable displacement pump coupled with variable speed DC motor 2.SIMULATION MODEL The simulation model consists of a DC motor coupled with a variable displacement vane pump. The vane pump pumps the hydraulic fluid from a hydraulic tank through small diameter flexible hoses (equiv. higher resistance), which represents the load, and back to the tank. The flow through the hoses causes a pressure drop which is measured directly after the pump by an ideal pressure sensor. The pressure after the pump is controlled by all three different drive concepts to match the reference pressure as precisely as possible. To be able to perform the simulation all the components used in the electrohydraulic circuit are modelled. Table 2: Electrical-hydraulic analogy 2.1. Variable displacement vane pump The simulation model uses relatively simplified model of a variable displacement vane pump. The main parameter of a hydraulic pump is displacement – volume of fluid pumped in one revolution of the pump’s shaft. If the displacement ( VD ) is multiplied by pump’s rotational Electrical symbol Electrical equation Hydraulic equation U RI p RH Q speed ( n ) and pump setting ( k p 0,1 ), we get the U L pump’s flow rate ( Q ) (1) [4]. Table 1: Variable displacement vane pump parameters Displacement VD = 6 cm3/rev. Cut-off frequency f = 50 Hz = 0.8 Pump efficiency Because the flow cannot be changed as soon as the pump’s setting changes, the pump’s delay is approximated as a low pass filter with a cut-off frequency ( f ) and can be expressed in Laplace’s frequency domain (2). f s 1 (2) torque ( TP ) which is proportional to it (3) TP k p VD p 2 p Q CH The flow produced by the pump creates a pressure difference in the flexible hoses due to resistance between hydraulic fluid and hose wall. When the pump is creating pressure difference ( p ) the pump’s shaft is loaded with (3) 2.2. Hydraulic tubing The dynamic behaviour of the fluid in the pipeline can be modelled in more different ways. The most exact model is based on the Navier-Stokes equations and the law of mass conservation, which results in a system of partial differential equations which are too much time consuming for such simulations. Such an exact model of hydraulic pipeline is not needed, because all three drive concepts will be tested on the same pipeline system. Therefore more appropriate – discrete model also known as model with concentrated parameters was chosen. The discrete model is analogous to electrical circuits used by electrical engineers, where the properties of a circuit are represented by resistance, capacitance and inductance. In hydraulics the properties of a pipeline system are hydraulic resistance RH (pressure drop in a 1 I dt C p 1 CH Q dt Using the electrical symbols the hydraulic pipeline system can be then represented by n segments as shown in Figure 2. Each segment represents part of a pipeline with a length of, l/n where l is total length of the pipeline. The number of segments also equals the number of possible pressure measurement points (ex. if the tube is modelled as one segment, the pressure in the middle of the tube cannot be calculated.) 1 1 dQ H dt (1) U p L dt Q k p n VD D dI RH LH n n 1 segment n Figure 2: Hydraulic tubing represented by electric symbols Because the pressure will be measured only at the pump outlet, the model will use a tube represented by only one segment. Such segment can be described using two differential equations; first one for hydraulic capacitance (4) and second one for resistance and inductance (5). If QC -flow through the capacitor is expressed out of the first equation and inserted into the second equation, a second order ordinary differential equation is obtained (6). Converting that equation to Laplace’s frequency domain and expressing p/Q yields the transfer function of the hydraulic tubing represented by one segment. p 1 CH Q c dt (4) p RH Q QC LH p RH Q CH p dp d Q QC LH dt d Q CH LH s RH LH C H s RH C H s 1 2 (5) dt dp dt (6) dt (7) tube due to flow), hydraulic capacitance C H (pressure Q drop in a tube due to tube volume increase/decrease) and hydraulic inductance LH (pressure drop due to fluid In the simulation a model of MINIMESS® flexible hose with inner diameter of 2 mm was used. All other hose parameters crucial for the simulation are described in Table 3. acceleration/deceleration). The analogy between electronics and hydraulics is presented in Table 2. [4] Table 3: Flexible hose and oil parameters Hose length l =10 m Hose inner diameter [5] d i =2 mm Hose outer diameter [5] d i =5 mm Pressure loss for mineral oil with viscosity of 30 mm RH 1 2 Armature current ( I a ) is controlled by controlling the armature E R =1 GPa Density of oil 900 3 Eoil 1 GPa The hydraulic oil plays an important role in the hydraulic transfer function. Its influence on the pipeline transfer function is hidden in the hydraulic resistance, capacitance and inductance, which can be calculated with the following equations (8, 9). [6] V0 ' Eoil 4 Eoil l 2, 41 106 l bar (8) Eoil di ER d a d i l bar LH 0, 080 2 l di min 2 4 PI pressure controller DC motor with speed and current control flexible hose displacement error (9) pressure setpoint Figure 3: Control strategy of combined drive concept In the electrohydraulic system model a brushed DC motor was used. The DC motor was chosen because its model and control is relatively simple. The motor parameters used in the model are shown in Table 1. Table 4: DC motor parameters Armature resistance Armature inductance Back EMF constant Torque constant Rotor inertia Friction coefficient Ra = 2.5+2*0.38 La = 0.3+2*1.5 mH Ke = 0.0195 Vs/rad Km = 0.0195 Nm/A J = 9.87e-6 kg.m2 B = 1.42e-6 Nm s/rad The dynamic behaviour of a DC motor can be split into electrical (10) and mechanical (11) part. Both parts can be modelled by differential equations (10, 11) which are interconnected by torque (12) and back EMF constant (13). dI a d dt variable pump pressure PI pressure controller 2.3. DC motor TE B J is Pressure is controlled by either DC motor in the indirect concept (variable motor, constant pump), or variable vane pump in the direct concept (constant motor, variable pump) or by both motor and pump in the combined concept (Figure 3). All controllers used in the simulation are PI type with internal (integrator) and external limits. PI controllers are known to be able to eliminate the steady state error and are more invulnerable to noise than controllers with the derivative (D) part. [8] 1 U a I a Ra La current 3.IMPLEMENTED CONTROL STRATEGY kg m CH armature Therefore the flow through the hydraulic pump coupled with the motor can be controlled by changing the voltage applied to the motor. l/min Hose’s Young’s modulus di2 and speed of the motor is therefore dependent on the motor load ( TL ) and the voltage applied to the armature. [7] s Bulk modulus of oil (Ua ) proportional to the electrical torque ( TE ). The rotational MPa/m [5] voltage dt Eb TL (10) (11) TE K m I (12) Eb K e (13) 3.1. DC motor controller The control structure of the motor has a triple closed loop or with other words cascaded control. The innermost loop is current control loop which controls the armature current by changing the armature voltage; the middle loop controls rotational speed of the motor by setting a desired current value to the current controller; and the outermost controller controls pressure in the pipeline, by changing the rotational speed. Integral gain of the current controller is chosen to compensate the poles of the electrical part and integral gain of the rotational speed controller to compensate the poles of the mechanical part. 3.2. Pump controller The pump is controlled by a single closed loop and controls pressure by changing the displacement. Integral gain is chosen in the way that the controller’s zero eliminates the pump’s pole. 4.SIMULATION RESULTS Simulations were performed on simulation model described above using Matlab/Simulink software. Dynamics of each drive concept were compared by responses to a combined cycle (sine, ramp and step) and a step. Simulation results are presented in Figures 4 to 7. 5.CONCLUSION The concept of variable motor coupled with constant pump has the slowest dynamics. It is about 5 times slower than the other two concepts. Other two concepts (variable motor + variable pump and constant motor + variable pump) are very hard to separate. On rising steps the concept with variable motor and pump is a bit slower, but on falling edges it’s sometimes slightly faster. The following two systems are very hard to compare, because the concept with variable pump and variable motor has two controllers which sometimes interfere with each other, resulting in poorer dynamics. Figure 4: Pressure control performance – combined cycle 5.1. Future work The control strategy for the concept with variable motor and variable pump should be improved, to minimize unnecessary changes (ex. lowering the rotational speed and increasing pump’s displacement which cancel each other out). Further task is to create a controller which will maintain the maximum possible efficiency for current operating conditions and comparison of the simulation model with a real-world measurement. 6.ACKNOWLEDGEMENT Figure 5: Rotational speed and pump setting – combined cycle Operation part financed by the European Union, European Social Fund. Operation implemented in the framework of the Operational Programme for Human Resources Development for the Period 2007-2013, Priority axis 1: Promoting entrepreneurship and adaptability, Main type of activity 1.1.: Experts and researchers for competitive enterprises. REFERENCES Figure 6: Pressure control performance - step Figure 7: Rotational speed and pump setting - step [1]MAJUMDAR, S. R. (2003) Oil hydraulic systems: principles and maintenance, McGraw-Hill. [2]LOVREC, D., ULAGA, S. (2007) Pressure control in hydraulic systems with variable or constant pumps, Experimental techniques, Vol.31, pp 33-41. [3]LOVREC, D., KASTREVC, M., HRIBERNIK, D. (2005) Primerjava prilagodljivih elektrohidravličnih napajalnih sistemov na primeru regulacije tlaka, Ventil, Vol. 11, pp 153-160. [4]LOVREC, D., HRIBERNIK, D., KIKER, E. (2002) Model elektrohidravlične regulacije tlaka - osnova za načrtovanje in optimiranje pogona, Ventil, Vol.3, pp 136146. [5]MINIMESS®-Technical data on DN2 and DN4 microbore hose. [6]MURRENHOFF, H. (1998) Grundlagen der Fluidtechnik - Teil 1: Hydraulik, IFAS-RWTH, Aachen. [7]KAMARUDIN, N., ROZALI, S. (2008) Simulink implementation of digital cascade control DC motor model - a didactic approach, Power and Energy Conference 2008, pp 1043-1048. [8]SCHLEICHER, M., BLASINGER, F. (2004) Control Engineering; A guide for beginners, JUMO. Corresponding author: TAŠNER Tadej, B.Sc.E.E., HAWE hidravlika d.o.o, Petrovče, Slovenia, t.tasner@hawe.si