inertia
advertisement

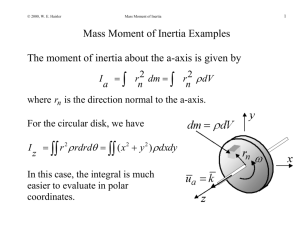
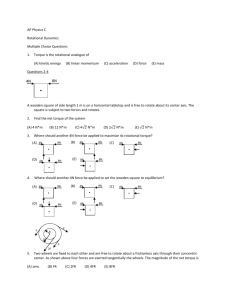
I Moment of Inertia I p. 1 2 1. Point Mass ( I = mr ) Let's use the simple version of torque (where r sin r r ) : rF From 'F = ma' we obtain: rF r ma (now using at r , we get...) rF r m r Finally we have a relationship between torque and angular acceleration: mr 2 and if we call mr2, the 'moment of inertia, I' then we have our Fnet = ma in its rotational form: net I 2. Lotsa point masses ( I mi ri2 ) That's a Greek sigma for 'S' (summation)! i 3. Continuous Mass Distribution ( I r 2dm ) Just think of the integral symbol as an elongated 'S' for summation! −−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−4. Hoop or Shell of mass, M, and radius, R ( I = MR2 ) I r 2dm = ? Well, since all the little masses ( dm's ) are all at a distance of r = R, we can 'slide' out R2 as a constant to get: I R 2 dm R 2 M (since the dm's add to M) HOOP VS SOLID CYLINDER ( I = ½ MR2 ) End View Side View HOOP I = MR2 5. Solid Disk or Solid Cylinder of mass, M, and radius, R, (any length!) ( I = ½ MR2 ) The plan here is to sum a lot of hoops with radius, x. (See inside ring above.) So… I r 2dm = x 2 dm (where we will integrate from x = 0 to x = R) For each x or ring, mass or 'dm' varies with its area (circumference, 2 r , times width, dx) M So replace 'dm' with ' 2 x dx ' and replace ' ' with (see box info below) to get: R2 M 3 I = x 2dm x 2 2 x dx 2 M M x dx Area Density: R2 Area R 2 4 R R M 2M 2M x Also dA dm 2 x dx I = 2 x3dx 2 = 2 R 4 04 R x 0 R 4 0 2R Finally we get: I = 1 2 MR 2 whew! (I mean Q.E.D) I Moment of Inertia I p. 2 1 ML2 ) rotation axis through it's c.m. 6. Rod of mass, M, and length, L ( ICM = 12 Here the plan is to integrate from x = 0 to x = L/2 (from the center out) and double our answer to get the I for the other half of the rod. I1/2 = r 2dm x 2dm M Linear Density: Doubling and substituting for 'dm' we get: L L L 3 2 2 2M x Also d dm dx M 2 I1/2 = I = 2 x 2 dx 2 x 2dx L 3 0 L x 0 Finally, we get: 2M L3 03 1 ML2 = Icm 12 L 38 3 x = L/2 x=0 7. Parallel Axis Theorem – When rotating any mass about a line parallel to a line through its center of mass: I = Icm + MD2 (where D is the distance between the two lines) x=L c.m. D = L/2 (distance from c.m.) x=0 8. Rod of mass, M, and length, L, rotated about a line at one of its ends (parallel lines...) ( I 13 ML2 ) Method 1/ Using the Parallel Axis Theorem, I = So we get: I = 1 ML2 12 1 ML2 + 12 MD2 = 1 ML2 +M(L/2)2 12 14 ML2 I 13 ML2 Method 2/ Integrating (we need the practice!) I = r 2dm ? This time we'll integrate from x = 0 to x = L (no doubling here!) So we obtain: I = x 2dm x 2 dx x 2 ML dx M Linear Density: L L L x3 2 M M = L x dx L = I 13 ML2 Also d dm dx 3 0 0 I Moment of Inertia I p. 3 9. Hollow Cylinder, mass M and with an outer (R2) and an inner (R1) radius. Same as the 'Solid Cylinder'. M M Just integrate from x = R1 to x = R2 Area Density: 2 Area R2 R12 Also dA dm 2 x dx I = r 2dm x 2 dA x 2 2 x dx 2 M R2 3 2M x 4 M 3 x dx = 2 = 2 x dx = 2 2 2 2 2 R R R2 R1 x R1 R2 R1 2 1 4 = 1 M R22 R12 R22 R12 2 2 2 R2 R1 1 I M R22 R12 2 R2 12 R1 M R24 R14 2 2 R2 R1 (This is just an exercise!) R1 R2 b a 1 2 b 12 x 2 dx 1 M a 2 b2 12 Here, we'll consider long rods with length, L = b, and integrate from x = 0 to x = a/2 and then double our result to get the other half of the plank or plate! For each 'dx' there will be a rod with area, bdx . M M Area Density: Using #7 above, the parallel axis theorem: Area ab 1 ML2 + Mx2 (where each rod is D=x away...) I = 12 Also dA dm b dx 2 2 1 each rod will have an I(or dI) of 12 b dm + x dm . 10. Rectangular Plate with dimensions 'a' and 'b' , I = I1/2 = 1 b 12 2 x dm = 2 a 2 x 0 1 b2 12 M x 2 b dx = b ab a a 3 3 2 M x M 1 2 a M 2 1 2 I1/2 = b 12 b x = 12 b 2 (0 0) a 3 3 ab a 0 b2 a 2 1 I = 2I1/2 = 2M = I M a 2 b2 12 24 24 2 a3 ab 24 24 I Moment of Inertia I p. 4 Time Out for Geometry! Area of a Frustum: A R1 R2 L (L is the slant height) Step 1/ What's the lateral area of a cone? L.A. = r (where is the slant height) Proof: Cut along a slant height and unroll. 2 r Notice the sector of a circle with radius, , and arc length, s = 2 r . The area of a sector when is measured in degrees is: Asector = 360 R2 2 2 R A R sector 2 2 rad rad When is measured in radians the arc length is: s rad 2 R s R 2 Using the figure above with s = 2 r = R = (since here R = ) 2 r 2 2 r 2 Asector r we get: Asector R When is measured in radians is: Asector = rad 2 2 Step 2/ What's the area of a frustum of a cone? Area = R1 R2 L (say R1 < R2) The area is simply the big cone area minus the little cone area. That formula is: Area = R2 2 R1 1 (Different?!) L To show the two formulae are equal we'll use: 's (ii) R1 2 1 and by 1 R2 R1 2 R2 1 Now we'll start with the first area formula and substitute L with 2 1 to get: Area = R1 R2 2 1 , now we'll 'foil' and... get: Area = R1 2 R1 1 R2 2 R2 1 , but by (ii) above R1 2 R2 1 = 0 (whoa!) so our first formula becomes: Area = R2 2 R1 1 = R2 2 R1 1 (whoa!) and that's our second area formula! (i) L = 2 I Moment of Inertia I p. 5 Now what was that frustum area all about? We'll actually use that A R1 R2 L to calculate the moment of inertia of a frustum-like piece of a thin spherical shell. 11. Thin Spherical Shell with mass, M, and radius, R ( I = 23 MR 2 ) Integrate from x = 0 to x = R and double our result. M M Area Density: Area dy dy x 2 2 2 4 R 2 Also use: x + y = R 2 x 2 dx 0 dx y Also dA = dm = 2 R ds Obtain slant height 'ds' with the Pythagorean Thm. dA = R1 R2 L 2r ds 2 2 2 2 2 (ds) (dx) (dy) ds (dx) (dy) or where ds = L (slant height) and 2 we replace (R1+R2) with 2r. ds 1 dy dx (used for arc length) and dx dA 2 y 1 dy 2 dx dx where 'r' is replaced by 'y', giving us: R I1/2 = r 2dm y 2 dA = y 2 2 y 1 0 1 dy 2 dx x y 1 I 2I 12 2 2 2 1 x2 y2 y 2 x2 y 2 dy 2 dx dx R y and I 12 2 y R M 4 R 2 3 R y dx 0 4M R y 2dx MR R2 x2 dx MR R2 x x3 0 = I 23 MR 2 R R 0 0 3 R 12. Solid Sphere with mass, M, and radius, R ( I 52 MR 2 ) At least the hard work has all been done above! Now we'll sum up (integrate) a lot of thin spherical shells from x = 0 to x = R . (Note: We don't have to double our result this time.) I dI 23 dm x 2 #10 (I 23 MR 2 ) and since dm dV 4 x2dx... I 23 x 2 I 2 M3 R 4 x dx x5 5 2 R 2 M3 R 0 That's All Folks! M 4 R3 3 5 R 5 83 R x 4dx x 0 0 I 52 MR 2 M Volume Density: Volume M 4 R3 3 Also: dV dm and with x = r dV = 4 r 2 dx 4 x 2 dx