DOC - Math For College
advertisement

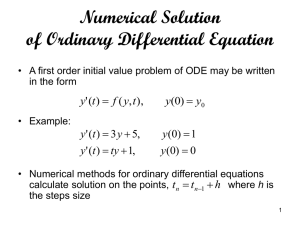
Chapter 08.03 Runge-Kutta 2nd Order Method for Ordinary Differential Equations After reading this chapter, you should be able to: 1. understand the Runge-Kutta 2nd order method for ordinary differential equations and how to use it to solve problems. What is the Runge-Kutta 2nd order method? The Runge-Kutta 2nd order method is a numerical technique used to solve an ordinary differential equation of the form dy f x, y , y 0 y 0 dx Only first order ordinary differential equations can be solved by using the Runge-Kutta 2nd order method. In other sections, we will discuss how the Euler and Runge-Kutta methods are used to solve higher order ordinary differential equations or coupled (simultaneous) differential equations. How does one write a first order differential equation in the above form? Example 1 Rewrite dy 2 y 1.3e x , y 0 5 dx in dy f ( x, y ), y (0) y 0 form. dx Solution dy 2 y 1.3e x , y 0 5 dx dy 1.3e x 2 y, y 0 5 dx In this case 08.03.1 08.03.2 Chapter 08.03 f x, y 1.3e x 2 y Example 2 Rewrite ey dy x 2 y 2 2 sin( 3 x), y 0 5 dx in dy f ( x, y ), y (0) y 0 form. dx Solution dy x 2 y 2 2 sin( 3 x), y 0 5 dx dy 2 sin( 3x) x 2 y 2 , y 0 5 dx ey In this case 2 sin( 3x) x 2 y 2 f x, y ey ey Runge-Kutta 2nd order method Euler’s method is given by yi 1 yi f xi , yi h (1) where x0 0 y 0 y ( x0 ) h xi 1 xi To understand the Runge-Kutta 2nd order method, we need to derive Euler’s method from the Taylor series. 2 3 dy xi 1 xi 1 d 2y xi 1 xi 2 1 d 3y xi 1 xi 3 ... y i 1 y i dx xi , yi 2! dx x , y 3! dx x , y i i i i 1 1 2 3 y i f ( xi , y i ) xi 1 xi f ' ( xi , y i ) xi 1 xi f ' ' ( xi , y i )xi 1 xi ... (2) 2! 3! As you can see the first two terms of the Taylor series yi 1 yi f xi , yi h are Euler’s method and hence can be considered to be the Runge-Kutta 1st order method. The true error in the approximation is given by f xi , yi 2 f xi , yi 3 (3) Et h h ... 2! 3! So what would a 2nd order method formula look like. It would include one more term of the Taylor series as follows. Runge-Kutta 2nd Order Method 08.03.3 y i 1 y i f xi , y i h 1 f xi , y i h 2 2! Let us take a generic example of a first order ordinary differential equation dy e 2 x 3 y, y 0 5 dx f x, y e 2 x 3 y Now since y is a function of x, f x, y f x, y dy f x, y x y dx 2 x 2 x e 3y e 3 y e 2 x 3 y x y 2 x 2 x 2e (3) e 3 y (4) (5) 2 x 5e 9 y The 2nd order formula for the above example would be 1 y i 1 y i f xi , y i h f xi , y i h 2 2! 1 yi e 2 xi 3 yi h 5e 2 xi 9 yi h 2 2! However, we already see the difficulty of having to find f x, y in the above method. What Runge and Kutta did was write the 2nd order method as yi 1 yi a1k1 a2 k 2 h (6) where k1 f xi , yi k 2 f xi p1h, yi q11k1h (7) This form allows one to take advantage of the 2nd order method without having to calculate f x, y . So how do we find the unknowns a1 , a 2 , p1 and q11 . Without proof (see Appendix for proof), equating Equation (4) and (6) , gives three equations. a1 a2 1 1 a 2 p1 2 1 a 2 q11 2 Since we have 3 equations and 4 unknowns, we can assume the value of one of the unknowns. The other three will then be determined from the three equations. Generally the value of a 2 is chosen to evaluate the other three constants. The three values generally used 1 2 for a 2 are , 1 and , and are known as Heun’s Method, the midpoint method and 2 3 Ralston’s method, respectively. 08.03.4 Chapter 08.03 Heun’s Method 1 Here a 2 is chosen, giving 2 1 a1 2 p1 1 q11 1 resulting in 1 1 y i 1 y i k1 k 2 h 2 2 where k1 f xi , yi (8) (9a) (9b) k 2 f xi h, yi k1h This method is graphically explained in Figure 1. Slope f xi h, yi k1h y Slope f xi , yi y i 1 predicted Average Slope 1 f xi h, yi k1h f xi , yi 2 yi xi xi+1 x Figure 1 Runge-Kutta 2nd order method (Heun’s method). Midpoint Method Here a2 1 is chosen, giving a1 0 1 p1 2 1 q11 2 resulting in yi 1 yi k 2 h where (10) Runge-Kutta 2nd Order Method 08.03.5 k1 f xi , yi (11a) 1 1 k 2 f xi h, y i k1 h 2 2 Ralston’s Method 2 Here a 2 is chosen, giving 3 1 a1 3 3 p1 4 3 q11 4 resulting in 2 1 y i 1 y i k1 k 2 h 3 3 where k1 f xi , yi (11b) (12) (13a) 3 3 k 2 f xi h, y i k1 h 4 4 (13b) Example 3 A ball at 1200 K is allowed to cool down in air at an ambient temperature of 300 K. Assuming heat is lost only due to radiation, the differential equation for the temperature of the ball is given by d 2.2067 10-12 ( 4 81 108 ) dt where is in K and t in seconds. Find the temperature at t 480 seconds using RungeKutta 2nd order method. Assume a step size of h 240 seconds. Solution d 2.2067 10 12 4 81 10 8 dt f t , 2.2067 10 12 4 81 108 Per Heun’s method given by Equations (8) and (9) 1 1 i 1 i k1 k 2 h 2 2 k1 f t i , i k 2 f t i h, i k1h i 0, t 0 0, 0 (0) 1200 k1 f t 0 , o 08.03.6 Chapter 08.03 f 0,1200 2.2067 10 12 1200 4 81 108 4.5579 k 2 f t 0 h, 0 k1h f 0 240,1200 4.5579240 f 240,106.09 2.2067 10 12 106.09 4 81 108 0.017595 1 1 1 0 k1 k 2 h 2 2 1 1 1200 4.5579 0.017595240 2 2 1200 2.2702240 655.16 K i 1, t1 t 0 h 0 240 240,1 655.16K k1 f t1 ,1 f 240,655.16 2.2067 10 12 655.16 4 81 108 0.38869 k 2 f t1 h,1 k1h f 240 240,655.16 0.38869240 f 480,561.87 2.2067 10 12 561.87 4 81 108 0.20206 1 1 2 1 k1 k 2 h 2 2 1 1 655.16 0.38869 0.20206 240 2 2 655.16 0.29538240 584.27 K 2 480 584.27 K The results from Heun’s method are compared with exact results in Figure 2. The exact solution of the ordinary differential equation is given by the solution of a nonlinear equation as 300 0.92593 ln 1.8519 tan 1 0.0033333 0.22067 10 3 t 2.9282 300 The solution to this nonlinear equation at t 480 s is (480) 647.57 K Runge-Kutta 2nd Order Method 08.03.7 Temperature, θ (K) 1200 Exact h =120 800 h =240 400 h =480 0 0 100 200 300 400 500 -400 Time, t(sec) Figure 2 Heun’s method results for different step sizes. Using a smaller step size would increase the accuracy of the result as given in Table 1 and Figure 3 below. Temperature, θ (480) Table 1 Effect of step size for Heun’s method t % Step size, h 480 Et 480 -393.87 1041.4 160.82 240 584.27 63.304 9.7756 120 651.35 -3.7762 0.58313 60 649.91 -2.3406 0.36145 30 648.21 -0.63219 0.097625 800 600 400 200 0 0 -200 100 200 300 400 Step size, h -400 Figure 3 Effect of step size in Heun’s method. 500 08.03.8 Chapter 08.03 In Table 2, Euler’s method and the Runge-Kutta 2nd order method results are shown as a function of step size, Table 2 Comparison of Euler and the Runge-Kutta methods (480) Step size, h Euler Heun Midpoint Ralston 480 -987.84 -393.87 1208.4 449.78 240 110.32 584.27 976.87 690.01 120 546.77 651.35 690.20 667.71 60 614.97 649.91 654.85 652.25 30 632.77 648.21 649.02 648.61 while in Figure 4, the comparison is shown over the range of time. 1200 Temperature, θ(K) 1100 Midpoint 1000 900 Ralston 800 Heun 700 Analytical 600 Euler 500 0 100 200 300 400 500 600 Time, t (sec) Figure 4 Comparison of Euler and Runge Kutta methods with exact results over time. How do these three methods compare with results obtained if we found f x, y directly? Of course, we know that since we are including the first three terms in the series, if the solution is a polynomial of order two or less (that is, quadratic, linear or constant), any of the three methods are exact. But for any other case the results will be different. Let us take the example of dy e 2 x 3 y, y 0 5 . dx If we directly find f x, y , the first three terms of the Taylor series gives Runge-Kutta 2nd Order Method y i 1 y i f xi , y i h 08.03.9 1 f xi , y i h 2 2! where f x, y e 2 x 3 y f x, y 5e 2 x 9 y For a step size of h 0.2 , using Heun’s method, we find y0.6 1.0930 The exact solution yx e2 x 4e3x gives y0.6 e 20.6 4e 30.6 0.96239 Then the absolute relative true error is 0.96239 1.0930 t 100 0.96239 13.571% For the same problem, the results from Euler’s method and the three Runge-Kutta methods are given in Table 3. Table 3 Comparison of Euler’s and Runge-Kutta 2nd order methods y(0.6) Exact Euler Direct 2nd Heun Midpoint Ralston Value 0.96239 0.4955 1.0930 1.1012 1.0974 1.0994 t % 48.514 13.571 14.423 14.029 14.236 Appendix A How do we get the 2nd order Runge-Kutta method equations? We wrote the 2nd order Runge-Kutta equations without proof to solve dy f x, y , y 0 y 0 dx as yi 1 yi a1k1 a2 k 2 h where k1 f xi , yi k 2 f xi p1h, yi q11k1h and a1 a2 1 1 a2 p2 2 (A.1) (A.2) (A.3a) (A.3b) 08.03.10 Chapter 08.03 1 (A.4) 2 The advantage of using 2nd order Runge-Kutta method equations is based on not having to find the derivative of f x, y symbolically in the ordinary differential equation a 2 q11 So how do we get the above three Equations (A.4)? This is the question that is answered in this Appendix. Writing out the first three terms of Taylor series are dy 1 d2y y i 1 y i h h 2 O h 3 2 dx xi yi 2! dx x y i i (A.5) where h xi 1 xi Since dy f x, y dx we can rewrite the Taylor series as 1 y i 1 y i f xi , y i h f xi , y i h 2 O h 3 2! Now f x, y f x, y dy . f x, y x y dx Hence 2 1 f f dy h O h 3 yi 1 yi f xi , yi h 2! x xi , yi y xi , yi dx xi , yi 1 f 1 f y i f xi , y i h h2 f xi , y i h 2 O h 3 2 x xi , yi 2 y xi , yi (A.6) (A.7) (A.8) Now the term used in the Runge-Kutta 2nd order method for k 2 can be written as a Taylor series of two variables with the first three terms as k2 f xi p1h, yi q11k1h f xi , y i p1 h Hence f x q11k1 h xi , yi f y O h2 (A.9) xi , yi yi1 yi a1k1 a2 k2 h f y i a1 f xi , y i a 2 f xi , y i p1 h x y i a1 a 2 hf xi , y i a 2 p1 h 2 f x q11k1 h xi , yi f y xi , y i a 2 q11 f xi , y i h 2 xi , yi O h 2 h f y O h3 xi , yi Runge-Kutta 2nd Order Method 08.03.11 (A.10) Equating the terms in Equation (A.8) and Equation (A.10), we get a1 a2 1 1 a 2 p1 2 1 a 2 q11 2 ORDINARY DIFFERENTIAL EQUATIONS Topic Runge 2nd Order Method for Ordinary Differential Equations Summary Textbook notes on Runge 2nd order method for ODE Major General Engineering Authors Autar Kaw Last Revised March 7, 2016 Web Site http://numericalmethods.eng.usf.edu