Word File on Ordinary Differential Equations
advertisement

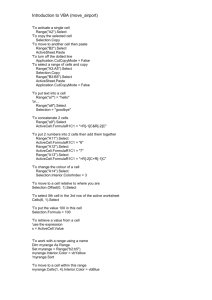
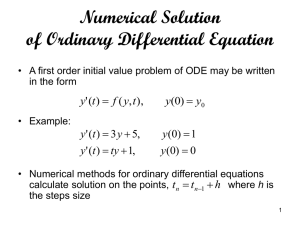
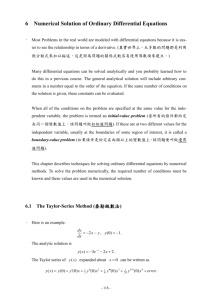
2/6/2016 Initial-Value Problems EMA 545 Ordinary Differential Equations - initial value problems The goal of this exercise is to learn how to numerically solve ordinary differential equations for which all of our prescribed conditions are given at one point. We will refer to these conditions as initial conditions and to this family of problems as initial value problems. For these problems the independent variable is generally time. Typical examples of such problems include pendulums, projectiles, and predator-prey problems. We will study two techniques for solving initial value problems: Euler’s method and fourth-order Runge-Kutta methods. The latter of these methods is by far the most used methods for these types of problems. Euler methods are rarely used for practical problems, for reasons that will soon be obvious. All of the solution methods deal with techniques for taking a known solution at time t and advancing it to time t t . This is known as taking a time step. If one takes a series of steps, then one can develop a solution for the differential equation over a given time interval. In general, the error in this numerical solution decreases as the time step t decreases. Euler’s Method Euler’s method is the simplest and least useful of these two methods. If we are solving a first-order differential equation of the form dy f (t, y ) dt with the initial condition y(0)=A, Euler’s method begins by approximating the first derivative as dy y (t t ) y (t ) . dt t Setting this equal to f(t,y) and solving for y (t t ) yields the following algorithm for advancing the numerical solution of an ordinary differential equation: y(t t ) y(t ) t * f t , y(t ) The problem with this simple technique is that it is unstable for any time step. That is, no matter how small we choose our time step, the solution obtained by this technique will always “blow up”. 1 2/6/2016 Initial-Value Problems The Fourth-Order Runge-Kutta Method The fourth-order Runge-Kutta algorithm is: k1 t * f ( t , y ( t )) k t , y( t ) 1 ) 2 2 k t k3 t * f ( t , y ( t ) 2 ) 2 2 k 4 t * f ( t t , y ( t ) k3 ) k 2( k 2 k3 ) k 4 y ( t t ) y ( t ) 1 6 k 2 t * f ( t As before, a series of these steps can be used to generate a full numerical solution to an initial value problem. This method is very powerful and is widely used. The Solution of Second Order Equations Our next task is to solve a second-order ordinary differential equation. The Runge-Kutta technique is designed to solve systems of first order equations, so we must first convert our second-order equation into two first order equations. For example, suppose we have the equation and initial conditions d2y dy c ky F sin( t ) 2 dt dt y (0) 1 dy (0) 0 dt m We can define the intermediate variable z(t) as dy z g (t , y, z ) dt which gives us: dy z dt dz c z k y F sin( t ) dt m y ( 0) 1 z ( 0) 0 2 2/6/2016 Initial-Value Problems This gives us two first order equations. We can now solve these using Runge-Kutta. Runge-Kutta for Two, Coupled First-Order Equations To solve a system of two, coupled equations, we modify the earlier Runge-Kutta algorithm according to: k1 t * g (t , y (t ), z (t )) l1 t * f (t , y (t ), z (t )) t k l k 2 t * g ( t , y ( t ) 1 , z ( t ) 1 ) 2 2 2 t k1 l1 l2 t * f (t , y ( t ) , z (t ) ) 2 2 2 t k l k 3 t * g ( t , y ( t ) 2 , z ( t ) 2 ) 2 2 2 t k l l3 t * f (t , y (t ) 2 , z (t ) 2 ) 2 2 2 k 4 t * g (t t , y (t ) k 3 , z (t ) l3 ) l4 t * f (t t , y (t ) k 3 , z (t ) l3 ) k1 2 * ( k 2 k 3 ) k 4 6 l 2 * ( l2 l3 ) l4 z (t t ) z (t ) 1 6 y (t t ) y (t ) This can be used to solve nearly any second-order initial value problem. The Excel macro to carry this out looks like: Function g(t, y, z) g = z End Function Function f(t, y, z) mass = 1 omega = 2 c = 1 k = 3 fo = 4 f = (fo * Sin(omega * t) - k * y - c * z) / mass End Function 3 2/6/2016 Initial-Value Problems Sub domanyrungthree() Dim writeinterval As Integer [A13:B1015].Clear ynot = Cells(4, 2).Value znot = Cells(5, 2).Value EndTime = Cells(6, 2).Value Steps = Cells(7, 2).Value StartTime = 0 t = StartTime h = (EndTime - StartTime) / Steps y = ynot z = znot Cells(12, 1).Select Application.ScreenUpdating = False ActiveCell.Value = "Time" ActiveCell.Offset(0, 1).Value = "Position" ActiveCell.Offset(1, 0).Value = t ActiveCell.Offset(1, 1).Value = y ActiveCell.Offset(1, 0).Select writeinterval = 5 ' For i = 1 To Steps Call runge(h, t, y, z, ynew, znew) t = t + h y = ynew z = znew ActiveCell.Offset(1, 0).Value = t ActiveCell.Offset(1, 1).Value = y ActiveCell.Offset(1, 0).Select Next Cells(1, 1).Select Application.ScreenUpdating = True End Sub Sub runge(h, k1 = h * l1 = h * k2 = h * l2 = h * k3 = h * l3 = h * k4 = h * l4 = h * ynew = y znew = z End Sub t, y, z, ynew, znew) g(t, y, z) f(t, y, z) g(t + 0.5 * h, y + 0.5 * k1, z + f(t + 0.5 * h, y + 0.5 * k1, z + g(t + 0.5 * h, y + 0.5 * k2, z + f(t + 0.5 * h, y + 0.5 * k2, z + g(t + h, y + k3, z + l3) f(t + h, y + k3, z + l3) + (k1 + 2 * (k2 + k3) + k4) / 6 + (l1 + 2 * (l2 + l3) + l4) / 6 4 0.5 0.5 0.5 0.5 * * * * l1) l1) l2) l2)