MECH3300 COMPUTER TUTORIAL 2 – Modelling 2D
advertisement

MECH3300/3302 COMPUTER TUTORIAL 2 – Modelling 2D problems
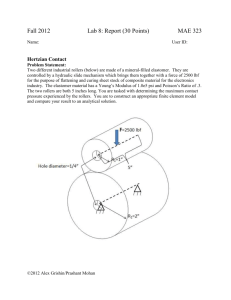
1. Plane strain crack model
This model will be constructed in STRAND7. The dimensions are those of the test
specimen used in the experiment in fracture mechanics. STRAND7 can import CAD
geometry, but cannot create geometry, hence for regular simple geometry, it is best to
create a coarse mesh that captures the geometry, that can then be refined (subdivided).
First enter x,y coordinates of the nodes of the coarse mesh below.
205 mm
148 mm
118 mm
88 mm
68 mm
48 mm
36 mm
26
mm
y
y fixed – beyond crack tip
x and y fixed
x
Pick Quad4 elements in Create, Element and join the nodes to create the coarse mesh.
The mesh can then be refined using Tools, Subdivide, to create a finer mesh, such as that
above. The mesh shown is too fine for the demonstration version of the program. Any
location to be treated as a crack tip is further refined using the mesh grading tool (Grade
Plates and Bricks) on the same tool menu. To replace an element by the subdivision
selected, click near the two sides of the element to be given the finer mesh – the sides
shown cross-hatched on the menu in STRAND7.
The mesh needs to be restrained to stop rigid body motion. First select Global, Load and
Freedom Cases and pick the 2D plane case under Freedom Cases – note that only x and y
displacements are used as unknowns. We wish to fix displacement normal to the plane of
symmetry ahead of the crack - the lower edge of the mesh, which is a half-model. This
will be revised to consider crack lengths from the load of 18, 30, 50, 70, 100 and 130 mm
– the shortest of these is not used in the practical. Use Attribute, Node, Restraint to
achieve this. Note one node must be fully fixed, to prevent sliding x-wards.
The load can be applied most simply to a single node. This is unrealistic locally, but
should still give a reasonable deflection. We need a unit load to find the compliance or
flexibility.
The Property setting is Plate property, then 2D Plane Strain. The properties of Perspex
are needed. Try Young’s modulus 2.6GPa and Poisson’s ratio 0.26. Solve and note the
displacement at the load for the various crack lengths, changing the restraints each time.
We will compare these values to the expectations of beam theory. Also plot the xdirection stress (Results, Contour, Stress). Use the global XX stress, as this is definitely
in the X direction. The local xx stress is in a direction determined from the first node
picked to the second node picked, when each element of the coarse mesh was created.
An advantage of the “combined” stresses, that are the principal stresses or functions of
them, are that they are independent of the choice of coordinates. Have a look at some of
these as well. Note that Von Mises stress, and Tresca stress – both numbers to compare
to yield strength - are always positive and do not distinguish tension from compression.
Examine the transverse shear stress. In theory for a cantilever, this is distributed
quadratically through the depth of the beam, peaking a mid-depth, the peak value being
Pc2/(2I), where c is half beam depth. Note, as the stress is really discontinuous at
element boundaries, the shear stress does not fall to zero at the surface, as it should.
To test the plane strain assumption, rerun the two longest longest crack lengths with the
actual 5.42 mm thickness of the specimen and a Plane Stress setting in the Property
menu.
To see how the accuracy is affected by an increase in the polynomial order in each
element (p-refinement), construct the mesh below with Quad8 elements. If in doubt
about the state of the model at any time, run Tools, Clean. This removes duplicate or free
nodes or duplicate elements, and checks the connections between elements. The hole is
created using the Tools, Grade Plates and Bricks menu, using the default setting of 0.5 on
radius to set the size of the hole. Note the unit load is now spread over three nodes for
greater realism. The mid-side nodes now present also need restraining ahead of the crack
tip.
Solve for the different crack lengths again.
To look at the effect of using more, smaller linear elements (h-refinement), construct a
mesh with six elements through the depth and appropriate numbers along the crack
specimen.
Estimating fracture mechanics parameters
The parameters G and KI both measure the severity of the stress conditions leading to
crack growth. G (strain energy released per crack surface area formed) can be estimated
from the change in compliance (or flexibility) with crack length a. Using Matlab or
some other tool, plot deflection at the unit load (twice that of this half model) versus
crack length, measured from the load. Do this for both linear meshes and the quadratic
one. Superimpose the deflection predicted by beam theory: (2PL3/(3EI)) for two
cantilevers. We could either think of P as unit load per width we applied, times the width
of 5.42 mm, or think of I here as the value for unit width, leaving P as unity, as that is the
assumption in a plane strain model. The former is more appropriate here. Also find the
deflection for the plane stress case of the coarser linear mesh for the two longest cracks,
and compare this to beam theory. It is worth looking at a log-log plot of the deflection v
crack length. Beam theory makes this a straight line with a slope of 3, due to the L3 term.
What are the finite element estimates of this slope from the plane stress and plane strain
data for the two longest crack lengths? This slope gives the change in compliance with
crack length d/da.
In the case of the shortest length, the depth of the beam is becoming comparable to its
length. In this situation, a correction of the deflection due to shear deformation is worth
considering. The extra deflection is 2Pc2L(1+)/(EI) where c is half the depth of the
beam, and is Poisson’s ratio.
Estimate G as a function of P
G = (P2/(2B)) d/da
B here is really 3 mm, not 5.42 mm, as there is a groove cut ahead of the crack to guide
its growth. Ignore this for the current computational exercise.
The mean stress ahead of the crack tip can be used to make an estimate of stress intensity
KI that should improve as the crack tip is approached. The quantity {(x+y)/2}(2x)
does in theory tend to KI, as x, the distance from the crack tip, ahead of the crack along
the plane of symmetry, tends to zero, as the stress components in polar coordinates all
depend on KI/(2r) f(), where r is radius from the crack tip, and f( is some function
of the angle. Setting 0 and r = x gives x = y = KI/(2x). The quantity KI
{(x+y)/2}(2x) can be estimated from the stresses in each element to the right of the
crack tip, along the plane of symmetry. Collect the data on these stresses and note it on
paper for the finer linear mesh. Then use (say) a spreadsheet to plot the above estimate of
KI, extrapolating to the crack tip.
The (crack opening) displacements at nodes prior to the crack tip (to the left of it) can
also be used to estimate KI by extrapolation. Again use the finer linear mesh. This time,
the quantity to be calculated at each node is
L
u
y
Eu y
2
KI
2
4(1 ) L(1 L )
2a
a
As L tends to zero, this estimate should again improve, the change being smoother than
that made from the stress, as displacement is the integral of strain.
For plane strain conditions, KI = (EG/(1-2)). How do the above two estimates of KI
compare to the estimate of G?
2. An axisymmetric model
This model will be created in the demonstration version of Nastran for windows, with a
300 node limit. Nastran can create a geometric (CAD) model itself, but one for the
purpose of meshing with finite elements. Loads and boundary conditions can be applied
to the geometry, as well as to the finite element model. There are many options in this
user interface. The F6 key brings up a menu that allows you to change the default
settings of what you see. In addition, on the top “View bar” there are options to change
the display (eg turning elements or geometry on or off, or switching from wireframe to
solid appearance of a mesh). Initially scales are visible, indicating the size of the model.
These can be switched off in “Tools and View Style”, “Workplane and Rulers”. Change
“Rulers” to “1. Skip Rulers”. The Quick Options
button is useful for turning
geometry on and off.
Examine the buttons on across the top of the screen and what they do. Loads, materials,
properties and restraints (constraints) in Nastran all have set numbers. Sets can lie
around in the data inactive, unless selected when solving. You can give a set a name to
help you remember what is in it (eg the type of loading).
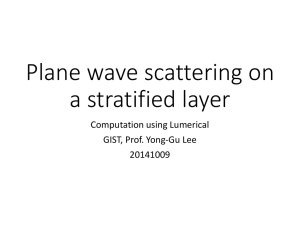
An axisymmetric analysis involves modelling half a cross-section, each element
representing a ring of material. In Nastran, the choice of elements is limited for
axisymmetric analysis. We will use 6 node triangles to automatically mesh the halfsection below, because, if we do not, the elements will be changed to this type anyway.
In an axisymmetric analysis, it is assumed that the deflections are just in the plane
modelled (ie radial and axial), and the global X axis is taken as the radius, global Z being
the axis of symmetry – here the axis of the shaft on which the flywheel spins. Hence you
should rotate to the XZ plane before creating any geometry.
Axis Z
5R
Surface 1
7.5R
Dimensions in mm
Surface
3
Surface 2
30
X
50
5
Plane of symmetry
15
Note: top half
modelled.
10
20
80R
90R
To build the largest model possible within the 300 node limit, draw the boundary of the
part of the half-section of the flywheel above its plane of symmetry as a series of curves
(Geometry, Curve). Note there are many ways of constructing a circular arc (Geometry,
Curve, Arc). A simple way is to first place a point at the centre of the arc, and then use
the Center, Start, End option. You need to start at the end that makes the arc
anticlockwise. The arcs above can be approximated to 90 degrees. Having constructed
the boundary, we need to create surfaces to mesh. The mesh generation software needs
simpler surfaces to do a good job, than the entire cross-section. Hence the geometric
model is divided into three surfaces as indicated above. The surfaces are specified using
Geometry, Boundary Surface, From Curves. Pick each curve in turn in sequence around
the boundary, to define the boundary of each of the three surfaces, and hence the surface
enclosed by it.
As usual, it is necessary to specify a material – this time use a high strength alloy steel (in
SI units) – note that E does not vary much with the alloy content of steels. To find SI
units, you need to scroll down the list of materials available – the default is imperial
pound force inch units. A property must be specified with Elem/Property Type set to
Axisymmetric, and to Parabolic elements. Make the property list point to the material.
Note Nastran expects you to create the material data first, then the property data, and then
finally the elements with that property. The thickness data is redundant. Set the element
default size to 4 mm (Mesh, Mesh Control). Then mesh the surface with triangles (not
the default quadrilaterals) in Mesh, Geometry, Surface. The number of nodes created
should be below the demostration version limit of 300. To be more precise, in the
Automesh Surfaces window, set “All Triangles” and then “Midside Nodes on Geometry”.
This does not in fact force the midside nodes to be exactly on the boundary, as there is
also a tolerance on element distortion to be observed. It is important to check for
duplicate nodes on common edges of surfaces meshed. (Tools, Check, Coincident nodes).
The default tolerance needs increasing to pick them up.
Use Model, Constraint Set to create a set of restraints. Name the set for later reference.
Open the menu Model, Constraint, Nodal to add restraints to this set. Restraints are
displayed as numbers – 1,2,3 are x,y,z displacements and 4,5,6 are the corresponding
rotations. There is no need to constrain this model radially (X-wards), as radial motion is
not a rigid-body motion – it stretches each ring element circumferentially. Nodes on the
central plane of symmetry must be fixed in the axial (Z) direction, making axial
displacements relative to this plane. Only TX and TZ translations are needed at each node
to write the equations that are solved.
To load the model, we wish to apply inertia loading corresponding to spinning at 10000
rev min-1. First create a load set (Model, Load, Set), then apply a body force (Model,
Load, Body). Make Velocity active and set Wz, the angular velocity about the Z axis in
rev s-1. This will cause inertia forces to be found by integration over each element.
Check the model: Tools, Check, Coincident Nodes. If this is not done, the flywheel
model will remain in three separate sections – one for each surface meshed.
Run the analysis (File, Analyse). The right hand menu – an alternative to the top menu,
is most convenient for examining results. Click on the bottom icon to open the postprocessing menu – and to select the latest output. The deflected shape can be switched
on. The scale may need to be set in the View Options (F6) menu. The Post Data {} icon
is used to select what quantities to plot as contours. Of interest in the output, is the
maximum principal stress, to assess if fracture could occur, with an assumed flaw size
that would not be easily detected, and the maximum Von Mises stress to check for
yielding. Locate these maxima. Also find the maximum radial deflection at the hub.
This is of interest in assessing what shrink fit is needed to avoid the flywheel coming
loose on its shaft. Advise on the safety of the flywheel and on a suitable shrink fit. What
would be the effect on the stressing of the flywheel of a shrink fit?
In order to make a rough check the accuracy of the stressing of the flywheel, the rim can
be analysed as an unsupported spinning ring. This will exaggerate the stresses, as the
web acts to limit radial expansion in reality. The expression for circumferential (or
hoop) stress at radius r in a spinning ring of outside radius b and inside radius a is given
by
3
a 2 b 2 1 3 2
2 (b 2 a 2 2
r )
8
3
r
again is Poisson’s ratio. is density. is angular velocity (rad s-1).
V1
L1
C1
Y
X
Z
What to submit
(1) Crack specimens
Submit the plots used to estimate compliance.
Report the two estimates of stress intensity, and the comparison of these to the estimate
of G from change of compliance with crack length.
Report on the accuracy of beam theory in this problem, and on the difference between the
deflection results from the meshes of linear and quadratic elements. As well as
comparing deflections, for the longest crack size compare the most compressive stress on
the top surface of each of the models to that expected for a beam. Also compare the
maximum transverse shear stress to its value from beam theory. Show how the stresses
change with h or p-refinement.
(2) Axisymmetric problem
Submit the comparison of the hoop stress in the rim with that in an unsupported rim.
Show the locations and magnitudes of critical stresses as requested in the discussion
above. Suggest a suitable interference fit at the hub.