example mars uav design
advertisement

MARS UNMANNED AIRCRAFT 2003-2004
ODYSSEUS TEAM
CORNELL UNIVERSITY
ADVISOR
PROFESSOR MICHEL Y. LOUGE
TEAM LEADER
ALEXANDER CHEFF HALTERMAN
DATE
APRIL 1, 2004
THE TEAM:
Team Members:
Alicia Billington
Emmanuel Franjul
Jian Gong
Alexander Halterman
Yen-Khai Lee
Jeremy Nersasian
Cem Ozkaynak
Jing Pei
Mikiko Ujihara
arb351
ef35
jg253
ach22
yl245
jbn5
co37
jp292
mu23
BEE
MAE
ECE
MAE
ECE
MAE
ECE
MAE
MAE
(2006)
(2005)
(2004)
(MEng 2004)
(2004)
(MEng 2004)2
(2005)
(2004)
(2004)
Advisor:
Professor Michel Louge
1
2
myl3
Student ID numbers are the students e-mail address (ID#@cornell.edu i.e. arb35@cornell.edu)
Ceased doing work after December 2003 due to January 2004 graduation
Abstract
As space exploration progresses, Mars gains more focus as the next frontier in human exploration.
Manned missions to Mars have been discussed and planned to a certain degree. However, before humans can set
foot on Mars, a wealth of information about Martian conditions will need to be provided by satellites, unmanned
vehicles and a myriad of other data collection instruments. The goal of the Odysseus team is to design an unmanned
aerial vehicle (UAV) for flight in the lower regions of the Martian atmosphere. Such a vehicle would collect specific,
high resolution topographic data for speculated landing sites. The data returned by this aircraft will be of the utmost
importance to the success of any Mars landing mission.
This paper focuses on the aerodynamics, propulsion, structures and electrical systems of an unmanned aerial
vehicle for flight on Mars. The Martian environment, as well as the mass sensitive nature of current space
exploration, present a set of conditions by which an aircraft must be designed. Such a design must optimize mass,
volume, flight time, power, and instrumentation in order to create an aircraft that can be sent to Mars with existing
spacecraft while satisfying its exploratory goals once it reaches Mars. A UAV design for Mars must incorporate
the aerodynamic properties for sustained flight in a low density atmosphere, propulsion in an atmosphere lacking
sufficient oxygen for combustion, structural integrity with minimal mass and electrical controls for unmanned flight.
Our UAV design overcomes these daunting constraints and provides a robust platform for reconnaissance of Mars.
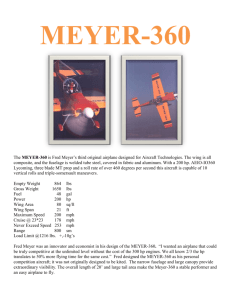
The final UAV design consists of a 10.8 kg aircraft with fuselage length of 2.1 meters, maximum
fuselage diameter of 0.25 meters, and a wingspan of 2.078 meters. For propulsion we have chosen a single 2.27meter diameter three-bladed propeller mounted aft of an inverted V-tail. The propeller motor as well as the
topographical and control instrumentation aboard the UAV is powered by multiple lithium-ion SPE batteries.
The data produced during flight will be continuously transmitted to satellites orbiting Mars that relay the signals to
Earth.
Flight control and navigation is accomplished through feedback from on-board sensors that detect
acceleration, pitch and roll. This design provides a flight time of 2.3 hours at a cruising speed and altitude of 130
m/s and 500 meters respectively. Further details of our design choices and potential alternatives are discussed
within the following pages.
fuselage designs. Electrical evaluated the capabilities of
various electrical components and communication
network designs. Through a series of presentations to
Professor Michel Louge that focused on our
conceptual, preliminary, and final design, we narrowed
down the initial trade-studies to a single UAV design
optimized for the Martian environment.
Our design process focuses only on the
technical aspects of flight on Mars, from the time the
UAV is deployed through its expected life-cycle. Other
aspects of the mission, such as launch costs and
procedures, Earth-to-Mars transit routes, aero braking
techniques upon reaching Mars, and atmospheric
deployment feasibilities were not considered in our
design. Additionally, cost, environmental impact,
political motivation and human safety were not
prevalent issues for us; however, technological and
mission feasibility were carefully evaluated throughout
the design process. Our final design only employs
technologies that are currently available or on the
horizon while acknowledging the many aerodynamic,
structural, propulsion, and electrical challenges of
deploying a fully-autonomous UAV on Mars for long
periods of time.
Introduction
Mars is indisputably the centerpiece of current
space exploration with both the scientific community’s
space exploration efforts and the general public’s
interest focused on recent investigative missions to the
Red Planet. In the spirit of human exploration the
Odysseus Team is designing an Unmanned Aerial
Vehicle to fly on Mars as part of the Revolutionary
Vehicles: Concepts and Systems University Student Competition
for 2004 sponsored by NASA. A UAV serves as a
reconnaissance platform for future manned missions to
Mars. The aircraft will carry topographical and imaging
instrumentation to produce valuable data regarding the
Martian environment.
The design of a UAV must optimize mass,
volume, flight time, power, and instrumentation in
order to create an aircraft that can be sent to Mars with
existing spacecraft while satisfying its exploratory goals
once it reaches Mars. Such a design for Mars must
incorporate the aerodynamic properties for sustained
flight in a low density atmosphere, propulsion in an
atmosphere lacking sufficient oxygen for combustion,
structural integrity with minimal mass and electrical
controls for unmanned flight. Our UAV design
overcomes these daunting constraints and provides a
robust platform for reconnaissance of Mars.
Atmospheric Constants
T0 (K)
223
General Design Methodology:
The design process began with the high-level
abstract evaluation of the various objectives and
constraints. Members of the team met twice a week to
develop the mission profile, such as the scientific
motivations behind a high-resolution topographical
map of the Martian surface and atmospheric profile,
both of which are not currently possible using existing
satellites or landers.
Following
the
mission
profile,
we
consolidated the various engineering aspects –
aerodynamics, structures, propulsion, electrical systems
– into a systems-level hierarchy of the conceptual UAV
design.
Each level of the hierarchy takes into
consideration safety and technological feasibility in
order to identify critical paths and achieve our stated
mission objectives. For instance, much of the fuselage
design relied on the availability of a light-weight
electrical engine to provide thrust needed to stay aloft
in the low-pressure environment. As such, several
interdependencies were stated early on and constantly
revised as we progressed.
Once the systems-level picture was developed,
each sub-team developed its own set of trade-studies
and constraints. Aerodynamics compared many airfoil
and wing designs using Matlab and Excel. Propulsion
compared the feasibility of propellers, chemical rockets,
and jet engines given the atmospheric constraints on
Mars. Structures required light-weight but durable
P0(Pa)
700
(m-1 )
9.00E-05
R
192.1
1.289
Table 1: Martian Atmospheric Constants
Martian Atmosphere and Environment:
Designing an aerial vehicle requires
knowledge of the environmental conditions the craft
will be flying in. One must know temperature,
pressure, density and viscosity as functions of surface
conditions and altitude. We have equations published
by NASA that give acceptable and reasonable fits for
atmospheric data. The equations are valid below 7000
Meters, which is above our cruise altitude, in an effort
to capitalize on the largest density possible, these
equations work well.
T T0 .000998 * h
(1)
P P0 e h
(2)
Equations ( 1 ) and ( 2 ) give the temperature
and pressure profiles respectively based on surface
values. Where is a constant (9e-5m-1) and h is altitude
in meters.
From temperature and pressure we
extrapolate data for density and speed of sound using
known values and laws. The ideal gas law ( 3 ) gives us
density as a function of temperature, pressure and the
gas constant R, which is 192.1 on Mars. Equation ( 4 )
1
solves for viscosity as a function of temperature. Speed
of sound, a, is found using equation ( 5 ) and known
values such as the ratio of specific heats, and
temperature.
T pR
therefore flight at the correct altitude becomes
important. Thrust specific fuel consumption (TSFC), a
relationship between distance and fuel required, is
ultimately a function of air density and thus altitude is
the determining factor for fuel efficiency. TSFC sets an
altitude for efficient cruise flight, from which a wing
loading can be chosen to attain cruise conditions at the
desired altitude. By choosing a specific wing loading
the designer can fix the wing area for a craft with a
target weight.
Our design did not have the luxury of using
thrust specific fuel consumption to fix wing area. Our
aircraft will be propeller driven and run off electrical
energy. Since our energy source has no dependence on
pressure or density, we can not set an optimum cruise
altitude. So we begin the design process without a
specified wing area. With this area we would have been
able to find appropriate airfoils, find maximum CL/CD
values and proceed to optimize the aspect ratio
dependant on wing weight and induced drag from wing
end conditions. Without it, wing area becomes another
parameter we need to optimize.
Next we begin our search for suitable airfoils.
Since the Martian atmosphere is approximately one
hundredth the density of Earth’s and the craft is small
in comparison to commercial aircraft, Reynolds
numbers will be very low. Traditionally, planes fly well
into the turbulent boundary layer regime, with a
Reynolds number on an order of 106. With the
conditions we are given, Reynolds number values will
be between 40,000 and 80,000, with 80,000 being an
extreme value that is unlikely.
Dealing with such low Reynolds numbers
poses a problem; boundary layers are largely laminar,
which are notorious for flow separation due to low
inertial forces. A craft flying in a laminar regime must
utilize an airfoil designed specifically for low Reynolds
flows. Traditional airfoil shapes are designed for
turbulent conditions and will not suffice in the Martian
atmosphere. On the advice of Professor David
Caughey of Cornell University, we considered research
done by Professor Michael Selig of the University of
Illinois at Urbana-Champaign. Professor Selig has
done a remarkable amount of work with low Reynolds
airfoils and has a wealth of data available, including lift
and drag coefficients at various angles of attack, as well
as coordinates that can be used to numerically generate
airfoils. With his data, we proceed with an airfoil
design.
We use Matlab and Excel to search through
roughly 1500 of Professor Selig’s airfoils to find those
most suitable for our applications. Rough calculations
show that for velocities limited to Mach 0.6 and
Reynolds numbers between 40,000 and 65,000, lift
coefficients are best chosen to be 0.3-0.6. This is a
relatively low value, but reasonable for this particular
application. With low Reynolds numbers, due to the
(3)
408.17
10
10
T 120
36.592T 1.5
asonic RT
(4)
(5)
is usually seen to take the value 1.4 because that is its
number for the air on Earth. is 1.289 on Mars due to
the abundance of CO2 (over 95%) that makes up the
Martian atmosphere. This lower value, along with the
lower ambient temperature, causes a lower speed of
sound, approximately 75% of that on Earth. This
means that speeds need to be further limited to avoid
sonic conditions.
Other considerations on Mars include the
rampant dust storms that can spring up unexpectedly
and make flight very difficult. These dust storms are
seasonal, allowing a wise launch and flight time to
reliably eliminate this potentially devastating threat.
Cruise Conditions
h (m)
500
T (K)
222.5
P (Pa)
669.2
(kg/m3)
1.57E-02
1.45E-05
A (m/s)
234.72
Table 2: Cruise Velocity Atmospheric Conditions
Aerodynamics Design
Introduction
As stated previously, the design of an aerial
vehicle for Mars is a tricky process due to the planet’s
harsh environmental conditions. Normally one begins
an aircraft design process by defining take-off and
landing scenarios, as well as approach to cruise altitude,
but the fact that this vehicle will be launched from orbit
makes this unnecessary.
Our first step is to determine the wing loading
necessary for the most efficient flight in cruise. Wing
loading is the force per unit area on the wing during
steady state flight conditions, which is important to
determine for two reasons. First, it fixes the area of the
wing. Knowing the wing loading simplifies the
minimum drag analysis by tying the wingspan and mean
aerodynamic chord (M.A.C.) together. Optimization
then becomes a question of choosing the correct aspect
ratio and taper ratio. The second reason involves the
fuel efficiency; aircraft designed with combustion
powered engines are sensitive to atmospheric changes;
2
need for a large chord and a small wing area, a lift
coefficient that is too high would tend to limit aspect
ratios. Induced drag becomes overwhelming in this
situation, causing inefficient flight.
With a rough value for the lift coefficient, we
use Matlab to inspect different airfoils for high lift-todrag ratios in the correct regime. Fifteen airfoils are
selected that have good characteristics around the
aforementioned CL values. Finding a high ratio of
CL/CD for 2D data does not guarantee a good airfoil.
Rather, Reynolds number, maximum thickness-tochord ratio and actual lift coefficient are also important.
Since the relationships are complicated and hard to
judge by inspection we input the potential airfoils into
Excel solver to find the optimum geometry and
minimum drag for each airfoil.
This completes the initial wing design. All
that remains is to select the proper sweep angle that
approximates an elliptical lift distribution. This can be
done after the geometry is largely set, then optimized a
second time to come up with the most efficient wing
possible.
equations, described in the previous Martian
Atmosphere and Environment section of the report,
that provide a rough model of the Martian atmosphere.
We also assume the Selig airfoil data to be
correct for all of the airfoils he tested. His tests were
done in a 3 foot wind tunnel using a rectangular wing
with a 33.375 inch span and a 12 inch chord. These
dimensions suggest Selig’s decision to minimize 3D
aerodynamic effects and that the data collected was
analogous to that of a 2D airfoil. The fact that the
span of the airfoil was so large in comparison to the
tunnel strongly supports this theory. If this was not the
case, blockage effects would be a large factor, and the
tests would be inaccurate. Efforts for backing up this
assumption are outlined later.
Finally we assume that the wing weight
estimation we use is accurate. Equation ( 8 ), later in
the paper, uses a series of constants, as well as
geometric and dynamic conditions, to make an estimate
for wing weight given conditions. We use this data in
optimizations to limit span. The values from this
equation agree with the values the structures team
obtain using the software Pro-Engineer and a suitable
material. This appears to be a valid assumption.
Design Assumptions:
Before we begin the design process, we need
to make certain assumptions to determine the optimal
wing structure. These assumptions are made to
account for the fact that we are not in possession of
accurate data for every scope of our design process. If
this design is to be finalized for physical flight on Mars,
accurate weather data and atmospheric gradients need
to be obtained to verify or refute our current
calculations. This kind of data collection is out of the
scope of this project and therefore we assume that our
atmospheric representation is correct. We have a list of
Lift Coefficient (CL) selection:
We begin the wing design by finding a lift
coefficient. Since the airfoils we are dealing with are
for laminar flow, the drag data is very erratic, making it
nearly impossible to find a valid curve that fits the data.
Although the lift curve slopes from the data are very
close to linear, the fact that drag is so far off makes
curve fitting to find continuous points virtually
impossible. Generally speaking, drag data from airfoils
Figure 2: Drag vs. a For a Low Reynolds Airfoil
Figure 1: Drag vs. a for a Standard Airfoil
3
C L vs. Reynolds Number
will follow a parabolic curve (see Figure 1) in the region
of the drag bucket. This allows you to fit a second
order polynomial to the data, and find values of drag at
continuous points on the curve. Figure 2 shows an
example of drag data from one of the Selig airfoils we
are considering. It can be seen that in low Reynolds
airfoils laminar bubbles and possibly hysteresis in the
switching from laminar to turbulent boundary layer
conditions result in erratic data. A parabolic curve of
the form C D C D kCL2 , where k is an arbitrary
0.6
0.55
0.5
CL 0.45
0.4
0
constant, can give an accurate fit to the drag data in
Figure 1. Using this parabolic fit and the easily
obtained lift curve slope, we can find CL and CD values
for any angle of attack, given a wing planform and an
aspect ratio.
Since the data does not yield a valid curve fit,
we are forced to use the discrete values that are
provided with the Selig data. The best option for the
laminar regime is to find a wing that is suitable for our
purpose and test it for numerous angles of attack and
use the data acquired. This is a time consuming
process and is unfeasible given the time and resources
available, so our choice is to use discrete data in place
of more expansive experimental data.
With discrete data we cannot determine an
exact lift coefficient, as the chance of finding a suitable
airfoil with that specific data point is unlikely. Instead,
we consider a range of lift coefficient values dependant
on Reynolds number. As Reynolds number increases,
with all other variables being held constant, velocity
increases and results in a lower lift coefficient needed
for the same net lift. The opposite is also true; a low
Reynolds number has a lower velocity, requiring a
higher lift coefficient. For the high end values of
Reynolds number, around 65,000, a CL value of around
0.35
0.3
35000
45000
55000
Reynolds Number
65000
75000
Chart 1: Optimal CL Values
Re 40000 45000 50000 55000 60000 65000
CL 0.555 0.521 0.468 0.453 0.403 0.359
Table 3: Optimal CL for a Given Re
0.35 is optimal. At the other extreme, for the low
Reynolds number case, a value of approximately 0.55 is
optimal. These optimized CL values are determined
using an Excel spreadsheet to generate feasible
planforms for a given Reynolds number.
With
constraints set by the user and a specific value for
Reynolds number, the solver generates optimal
planforms for that condition. Angle of attack is one of
the constraints, so an optimal value for CL is found for
each airfoil and entered Reynolds number.
Since drag is related to velocity and we desire
a low value for drag, a low Reynolds number will yield
a lower drag. A CL of 0.55 is set as the design lift
coefficient with a corresponding Reynolds number of
40,000. However, this estimation does not take into
account base drag of different airfoils, which play a
small part in the overall drag. Further work shows that
this CL value is optimal.
Computational analysis:
Computational analysis makes up a large
percentage of the work involved in obtaining a sound
model for the airfoil characteristics. Sorting through
650 airfoils is a manageable task with Matlab analyzing
each airfoil and linking it to an Excel spreadsheet. The
initial stages involve writing code to take the data and
put it in a user friendly form. The design of a graphical
user interface (GUI), shown in Figure 3 further eases
the process of airfoil selection. The user can browse
various airfoils based on target Reynolds number and
vary plots of data until desirable curves are found.
Saving the layout allows us to return to configurations
at a later point for further review. This allows for
Figure 3: Matlab User Interface for Airfoil
Analysis
4
standpoint, a large AR, between 7 and 10, is a well
designed wing. However, a large span means larger
bending moments in the wing structure, due to lift
loads acting farther from the root of the wing, resulting
in additional weight needed to withstand the increase in
bending moment; something discussed in the
Structures section.
Taper ratio is the ratio of tip chord to root
chord, in our case 0.2. A wing with a low taper ratio,
referred to as “a highly tapered wing,” tends to have
lower lift coefficients on the outer portion of the wing,
as the downwash pattern changes, toward an elliptical
lift distribution. Low taper ratio also results in larger
chords and wing thickness inboard where the bending
moments are the largest, moving the lift in towards the
craft, reducing the aerodynamic bending moments.
Both of these effects are favorable for wing structural
weight. However, low taper ratio wings have a
tendency to stall at the tip, which is prevented with
wing twist.
With the final structural and electrical weights
we find that a slight increase in wing area, to produce
more lift, is required for cruise flight. We decided that
we will keep the span constant and obtain the
additional required platform area by increasing the
taper ratio. The final taper ratio is 0.35, which leads to
a platform area of 0.6 m2, a new AR of 7.2 and an
increased safety factor of greater than 1.2
Geometric twist is the equivalent of taking a
straight wing, and applying a moment about its axis,
causing the tip of the wing to be at a different angle
than the root of the wing, in our case, negative three
degrees. A positive value of twist refers to an increase
in angle of attack along the span of the wing. A
negative twist value, known as “washout,” greatly
increases the stability of the craft by causing stall to
occur at the root of the wing before occurring at the
wing tip. When this happens, control can still be
maintained due to the moment that can be generated
from the tips of the wings to control the rolling motion
of the craft.
Design Constraints
Re
specified
taper ratio
>.2
mach number
Ma > .55
wing span
1.5 < b <4
altitude
h >400
1/4 chord sweep
0 < c¼ <10
Aspect Ratio
Ar >3
Table 4: Design Constraints
simultaneous generation of several acceptable
planforms for various airfoils.
The ‘Target Re’ field allows the user to search
for the airfoils closest to the desired Reynolds number.
The fields that follow are outputted data relevant to the
current airfoil. This is useful for visualizing the current
wing design to verify that the geometry is acceptable on
aesthetic and packaging standpoints. Buttons allow the
user to browse various angles of attack and cycle
through different Reynolds number airfoils with ease.
The user is also able to select between graphs of CD vs.
CL, CL vs. , CD vs. and CD/CL vs. depending on
the desired lift and drag characteristics of an airfoil.
Excel parameterizes the planform layouts and
reduces the design problem to four variables with given
geometric constraints: wing span, root chord, tip chord
and sweep angle. (See Table 4) Since the initial
optimization objective is to find the lowest possible
drag for reasonable geometric constraints, overall wing
weight is a secondary factor in comparison to drag
optimization, and thus is not included as one of the
constraints.
Airfoil Selection:
Using the Matlab GUI with the Selig data we
can narrow down the 650 airfoils to 9. This is done by
selecting airfoils that have high CL/CD values at the
design lift coefficient of 0.55 and a Reynolds number
between 40,000 and 65,000. As Reynolds number
increases, the CL/CD values required for a feasible
airfoil increase due to the need for a lower aspect ratio
and the resulting increase in induced drag. This results
in fewer airfoils that meet our goal as the Reynolds
numbers increase.
With secondary optimization of the nine
airfoils selected, six have favorable characteristics. Only
one of these surpasses the others in both low drag and
low weight (see Table 5). Airfoil gm15 makes possible
a planform of low weight, short wing span and low
drag. Note that sweep value refers to the sweep angle
added in addition to the sweep induced from the taper
ratio. The actual leading edge sweep angle will be
higher than this value.
Based on the geometric properties for our
selected airfoil, our calculations yield an aspect ratio of
8.22 and a wing platform area of 0.525 m2. The aspect
ratio is defined as b2/S; for a given wing area, S, a large
aspect ratio means a large span. From a drag
Wing Drag(N) Mass(kg) b(m) Sweep croot (m) Ctip (m)
gm15
s6063
s7012
rg14
rg14
gm15sm
gm15sm
sd7003
sd7003
2.4442
2.9398
2.5381
2.8761
2.8331
2.6638
2.4501
2.5914
2.5313
0.82
1.86
1.41
2.22
1.33
2.55
1.59
2.62
2.34
2.078
3.1
2.922
3.645
2.848
4
3.162
4
4
4.9
7.1
4.9
7.1
5
6.2
4.6
6.6
4.8
0.422
0.966
0.627
1.131
0.628
1.087
0.631
1.164
0.84
0.084
0.193
0.125
0.226
0.126
0.217
0.126
0.233
0.168
Table 5: Multiple Optimization Results for 6 wings
5
Mean Aerodynamic Chord & Center
Mean aerodynamic chord ( c , M.A.C.) is a
parameter, directly associated with the Reynolds
number ( Vc / ). Equation ( 6 ) shows the M.A.C.
lift at the tip. A sharp edge makes it more difficult for
the air to flow around the tip, because the flow often
separates at these edges. A winglet or endplate blocks
the flow from the bottom to the top of the wing. This
offers the greatest benefit to low aspect ratio wings
whose wing tip vortex is strong, by increasing the
effective wingspan, which further decreases induced
drag. Our concern with using a winglet is the
additional wetted area, which will create a larger
parasite drag nullifying any reduction in induced drag.
An unswept wing tip curves upward to increase the
effective wing. We are using this design since it is
similar to adding a winglet, without an increase in total
wetted area.
as a function of the taper ratio () and the exposed root
chord (CR).
M . A.C.
2
C R (1
) 0.307
3
1
(6)
Y, the distance of the M.A.C. from the centerline of
the aircraft is 0.436 meters. This distance is dependent
upon the taper ratio and the wing span. Aerodynamic
center is the point on the aircraft where the airfoil
pitching moment is constant with a change in angle of
attack. It determines where to position the wing, and is
important in stability calculations. In subsonic flow,
the aerodynamic center is typically located at the
quarter-chord point on the mean aerodynamic chord
line, which is found to be 0.0768 meters from the
leading edge of the wing.
From equations historically used in aircraft
design, such as Equation ( 7 ), we conclude that the
aerodynamic center will be located 0.703 meters from
the nose of the UAV.
A.C. 1.5CR 0.25c
Wing Weight and Structural Considerations:
With any extraterrestrial mission weight is a
top priority. Our mission is no different. Generally,
wing weight selection is an iterative process between a
structures team and an aerodynamics team. Due to
time constraints, we approximate the wing weight with
equation ( 8 ), a formula based on historical data used
by many aircraft manufacturers as an initial wing
weight. The formula is a relationship between,
dynamic pressure, q, aspect ratio, AR, total aircraft
weight, Wdg, thickness-to-chord ratio, t/c, load factor, n,
taper ratio, , wing area, Sw, sweep angle, , and a
multitude of constants, C1 through C14, that have been
obtained using years of data for three classes of aircraft:
fighter, transport and general aviation. Using the
general aviation constants and the planned weight of
the craft, 10 Kg, a circular reference of wing area, lift
force, total craft weight and wing weight is created in
Excel. Turning on the iteration command in Excel
causes the values to converge to a steady state solution
for weight analysis, solving with ease a process
otherwise overly complicated by hand.
(7)
Wing Vertical Position
The wing’s vertical placement with respect to
the fuselage can be at three locations: atop, below or
through the middle of the fuselage. A high wing design
is used primarily for cargo planes, allowing the fuselage
to be placed closer to the ground. However, the
passing of the wing box over the fuselage will increase
the parasite and pressure drag due to the increase in
frontal area. This increase in frontal area is also present
in a low wing design, which is used by virtually all
commercial transport aircraft due to the advantages in
landing stowage. Since we are not concerned about
landing, we have no need for a low wing design. The
advantage to a mid-wing design is that it gives the UAV
more maneuverability while having a lower frontal area
than the high or the low wing design. Due to the
advantages associated with a mid-wing design, we are
placing the wing in the middle of the fuselage.
c
C8
Wwing C1C2C3WdgC4 nC5 S wC6 AC7 t
...C9
C10
Wing Tip Selection
A wing tip can prevent high pressure air
beneath the wing to “escape” around the tip of the
wing to the low pressure region above, resulting in a
loss of lift at the tip of the wing, which is highly
undesirable. Four different wing tip designs are
considered: rounded, sharp, winglets and unswept. A
smooth-rounded tip is precisely what we want to avoid.
It easily permits air to flow around the tip and reduces
(a)
cos
C11
S
C12
f
C13
q W
(8)
C14
fw
(b)
Figure 4: (a) Upswept Wingtip (b) Inverted V-Tail
6
them. Plotting the CL/CD vs. angle of attack () data
for all four, we find the tail desired angle of attack to be
between 3 and 5 degrees. By comparing the values of
CL/CD at 3 degrees for each candidate, it is apparent
that SD7003 is the best airfoil at the value we need for
angle of attack.
Tail Arrangement Selection
Tails act as small wings; their purpose is to
provide trim, stability and control to the craft. Trim is
the generation of the proper lift force to balance
pitching moment about the center of gravity. Stability
and control are the tail’s ability to restore the aircraft
from a perturbation in pitch, yaw, and roll, which is
discussed in detail in the section of stability and
control.
There are a variety of possible aft-tail
arrangements. Our design focus is on reducing parasite
drag. We can thus narrow our search to four possible
tail configurations based primarily on the wetted area
of each tail configuration: conventional, V-tail, inverted
V and Y-tail.
Conventional tails, used on over 70% of all
aircraft, have the typical vertical and horizontal tail seen
on most commercial airliners. It provides adequate
stability and control at a reasonably light weight. With
the V-tail, as the name suggests, the vertical and
horizontal tail components are combined in an attempt
to reduce the wetted area. The horizontal and vertical
forces, on the V-tail, are the resultant of their
respective projections from the two angled surfaces.
In order to provide the proper movement, the
rudder and elevator on a V-tail are combined to create
“ruddervators.” The problem with a V-tail is the
production of a rolling moment in opposition to the
desired direction of turn, known as “adverse roll-yaw
coupling.” This produces a spiraling tendency when the
UAV is making a turn. The inverted V-tail avoids this
problem; it instead produces a desirable “proverse rollyaw coupling”.
The “Y-tail” is similar to the V-tail, with a
reduced dihedral angle and a third surface mounted
vertically beneath the V, giving the UAV more yaw
control. A drag penalty involved with adding another
control surface causes the Y-tail design, like the
conventional design, to not fit our design goals of
minimizing drag. Using an inverted V-tail gives us the
low drag required with greater stability than the
standard V-tail.
Stability and Control
Stability and control is an integral part of
designing an aircraft. It is vital that the aircraft is stable
and able to handle moments, from various
disturbances, while maintaining control. An aircraft
possesses three degrees of freedom, pitch, roll, and
yaw, and has two types of stability, static and dynamic.
A system is statically stable if forces and moments
acting on a body, as a result of a disturbance, initially
act to return the body towards its equilibrium position.
A system is dynamically stable if it eventually returns to
and maintains its equilibrium position over a period of
time. For our case, our top concern is longitudinal
static stability, involving the pitching moments about
the center of gravity. Though, as with any aircraft,
lateral-directional static stability and control involving
yaw/roll moments are also important.
The steps to design a stable aircraft are as
follows:
1) Make an assumption for the location of the
center of gravity with respect to the nose of
the aircraft
2) Make an educated guess regarding the
placement/sizing of the tail
3) Determine the moment about the center of
gravity due to the wing, fuselage, tail, and
payload
4) If the moment coefficient, calculated in
equation ( 9 ), at zero lift (Cm L=0) is positive
and the slope of the moment coefficient
versus angle of attack (dCM/d) is negative,
the aircraft is longitudinally and statically
stable
5) Reiterate the process if necessary
6) Determine the static margin
Tail Airfoil Selection
The goal in selecting an airfoil for the tail is
similar to the wing, in that we want an airfoil with high
lift-to-drag ratios.
Since tails are small wings
themselves, we look at the final low Reynolds number
airfoils from the wing selection process. The main
purpose of tails is not to generate lift, but to provide
stability and control. For this reason, airfoils used for
tails typically have little to no chamber to them. Since
our wing airfoil has high camber, the chosen wing
airfoil, gm15, is not applicable for the tail. Based on lift
and drag data, as well as amount of camber, we limit
our choices to four airfoils: SD 7003, S6063, S7012,
and RG14, all of which have only slight camber to
CM
M cg
1
2
V 2 Sc
(9)
Equation ( 9 ) solves for the moment coefficient about
the center of gravity, where M is the moment
contribution about the center of gravity, is the
density of the atmosphere, V is the cruise speed, S is
the wing platform area and c is the mean aerodynamic
chord, dependent on taper ratio.
We use equation ( 10 ) to determine the
moment coefficient about the center of gravity at zero
lift; recall that this value must be positive for the
aircraft to be stable. The first term on the right hand
7
side of the equation is the moment contribution from
the wing and the fuselage, about the center of gravity.
The second term is the moment contribution from the
tail. CM(payload) is the moment induced by the payload.
The moment coefficient about the center of gravity
from the wing and fuselage, CM,CGwb, is approximated as
the sum of the moment contribution of the wing body
about the aerodynamic center and the moment
generated by the lift force from the wing,
M cgw M acw LW cos w (hc hacw ) . Drag terms are
St, to be 0.15 square meters and the tail moment arm,
Lt, to be 1 meter. Solving for tail moment coefficient
yields a value of 0.25, which more than compensates
for the moment coefficient from wing, fuselage and the
payload.
dCm
d
h hacwb Vh t / 1
d
d
With the first stability criteria satisfied, we can
solve equation ( 12 ) for the second criteria, negative
dCM/d Where and tare the lift curve slopes of the
wing and the tail respectively, the quantity (h - hacwb) is
the distance between the center of gravity and the
aerodynamic center, and d/d is the rate of change of
the downwash angle with respect to the angle of attack
for the wing, approximately 0.45. dCM/d satisfies the
second stability criteria with a value -0.03
With both of the criteria satisfied the UAV is
longitudinally and statically stable. The neutral point is
a fixed point on the UAV behind the center of gravity
where dCM/d is equal to zero, and must be aft of the
center of gravity in order to achieve longitudinal
stability. Setting dCM/d to zero and solving for h gives
the location of the neutral point at 1.06 meters from
the nose of the craft. The static margin, the difference
between the neutral point and the center of gravity, is
0.217m. This parameter is directly related to the
stability of the UAV, the larger the static margin, the
greater the pitching moment must be to cause a change
in the pitching angle. However, too large a static
margin may cause the flight controller to go unstable
due to unacceptably high reaction latency. On the
other hand, too low of a static margin will yield an
aircraft that is inherently unstable in regards to pitching
motion, and will require very fast control response to
maintain steady state cruise conditions. Our static
margin is between these two extremes, allowing
stability without an over-active controller.
In many ways, the lateral-directional analysis
resembles the longitudinal analysis. Lateral-directional
stability is the tendency of the UAV to return to a
wing-level attitude after being displaced from a level
attitude by roll or yaw moments, from such things as
turbulent air. There are two primary factors for lateraldirectional stability: wing dihedral angle and wing
sweepback angle. Dihedral angle is the angle at which
the wings are slanted upwards from the root to the tip;
not included in the calculation of wing and fuselage
moment coefficient, as they are negligible compared to
the other terms. Solving equation ( 10 ) gives us a
value of 0.041 for CM,CGwb.
C
M ,cg L0
CM ,cgwb VHat (it , eo ) CM ( payload)
( 10 )
To determine the moment coefficient from
the payload, we establish a series of point loads to
approximate the weight distribution. This layout can
be seen in Figure 5. According to our calculations the
center of gravity will be 0.85 meters aft of the nose of
the UAV. Moment calculations yield a moment
coefficient value of -0.153 (negative moment being in
the clockwise direction.)
In order to satisfy the first stability criteria, a
CM,cg greater than zero, the tail must be large enough to
balance the clockwise moment produced by the
payload and lift forces. According to our calculations
the tail moment coefficient must be larger than 0.194.
The moment coefficient is defined as Vhat(it+eo), where
Vh is the tail volume coefficient, at is the lift curve slope
of the tail airfoil (~ 0.1), it is the tail setting angle (~3
by standard convention), and eo is the downwash angle,
which can be neglected.
Vh
lt St
cw S w
( 11 )
Vh, the tail volume coefficient, is proportional to lt , the
distance of the tail from the center of gravity, St ,the
platform area of the tail, cw , the M.A.C. of the wing and
Sw , the wing platform area. Equation ( 11 )shows that
the further away the tail is from the center of gravity,
the smaller the area of the tail needs to be. We want to
make the tail large enough to give us adequate stability,
but not as to further increase the parasite drag. To
optimize both parameters, we set the tail platform area,
0.25
0.65
0.75
0.85
1.60
0m
4.2kg
Battery
1.75
2.1
m
cg
1.17kg Lidar
Controls
( 12 )
0.61kg
Camera
1.8kg
Motor
Figure 5: Payload Point Mass Layout for Aerial Vehicle
8
0.6kg
0.43kg
drive shaft Propeller
its main purpose is to correct roll moments. The
stabilizing effect of dihedral occurs when an aircraft
sideslips slightly as one wing is forced down in
turbulent air or during a turn. This sideslip results in a
difference in the angle of attack between the higher and
the lower wing. The increased angle of attack on the
lower wing produces an increase in lift which helps the
wing return to its level position. Research leads us to a
dihedral angle of 3.5 degrees.
Sweepback is the angle between the line
formed from the front of the wing and the line
perpendicular to the centerline, in the plain of the
aircraft. The effect of sweepback in producing lateral
stability is similar to that dihedral angle. A yaw
moment increases the sweepback angle in one wing
panel and decreases it for the other side of the aircraft.
The change in sweep alters the effective dynamic
pressure normal to the quarter-chord line of the wing
panel, increasing the lift on one side of the wing,
lowering it on the other side, and producing a restoring
moment. Historical trends in wing sweep back give us
a sweep angle of 5 degrees.
Furthermore, being a 6 degree of freedom system, a
soundly designed multi-input/multi-output, or MIMO
controller to be used is required for an aircraft. The
designing of such controllers are currently beyond our
expertise.
Cruise Performance
The stall speed is determined directly by wing
loading and the maximum lift coefficient. Stall speed is
a major contributor to flying safety, indicating the
minimum speed that will keep the UAV aloft. When
an aircraft flies below the stall speed, flow around the
airfoil begins to separate; as a result, a rapid loss in lift
will be experienced. At that point, if the velocity is not
increased beyond the stall speed, the aircraft will lose
altitude and thus lose control. Equation ( 13 )
determines the stall speed where W is the aircraft
weight, is the fluid density, S is the wing platform
area and CLmax is the maximum lift coefficient of our
airfoil, obtained from the graph of CL vs. angle of
attack. Our aircraft has a stall speed of 83.4 m/s; we
must fly above this speed in order to maintain adequate
lift.
Since our main goal is to map as much terrain
as possible, it is necessary to maximize the range. To
do so, we must fly at the speed where lift to drag ratio
is greatest, given in equation ( 14 ) where CDP is the
parasite drag coefficient and AR is the aspect ratio of
the wing.
Tail Geometry
Having found the platform area of the tail, St
based on stability constraints, it is important that we
obtain the tail geometry. Determining the aspect ratio
is crucial; having a large aspect ratio corresponds to a
small chord, which further leads to an unusually low
Reynolds number. Likewise, a small aspect ratio will
lead to a substantial increase in induced drag. After
much consideration we decided on an aspect ratio of 4.
Using a taper ratio similar to that of the wing, 0.35, we
determined the length of the tail root and tip chord.
Similar to that of the wing, the tail mean aerodynamic
chord ( c t ) is a function of the root chord and the taper
Vstall
V L / Dmax
ratio. Based the c t value, we determined the tail
Reynolds number, which is approximately 30,000. This
value is in fact only half of the optimum Reynolds
number suggested for our selected airfoil (SD7003).
However, because the tail angle of attack will be small,
boundary layer separation would almost be nonexistent.
Therefore it is ok for the operating Reynolds to be
smaller than the optimal value.
2W
SClMAX
2W
S C DP AR e
( 13 )
( 14 )
Range is maximized when VL/D is 130 m/s
(Mach number of 0.56). If the cruising speed is set to
be greater than this value, then there will be a
substantial increase in drag. Values deviating from this
velocity will result in a loss of range.
Turning Performance
Maneuverability plays an important role in the
design of an aircraft. Unlike combat planes that
perform sharp turns, our UAV only needs to be able to
slowly turn to avoid physical obstacles that it may
encounter. A crucial parameter in trying to figure out
the turning performance of the aircraft is the load
factor, n, defined as the ratio of lift-to-weight. In our
case, n is approximately equal to 1.095. The wing bank
angle, defined as cos-1(1/n), is approximately 24
degrees. Ailerons control the wing bank angle by equal
and opposite deflection of the two wings trailing edges,
one up and one down; thus increasing lift on one side
and decreases lift on the other side of the aircraft,
Control
The primary aerodynamic controls available
are ailerons, elevators, and rudders. Because we are
incorporating a V-tail design, the functions of elevators
and rudders will be combined into one. Ailerons are
the primary roll-control device, which operate by
increasing lift on one wing and reducing it on another.
They range from 50 to 90 percent of the wingspan and
20 percent of the wing chord length. Since the aircraft
is unmanned, a suitable, redundant controller must be
designed to stabilize and maneuver the aircraft.
9
CLvs. Angle of Attack & CL/CD vs. Angle of Attack
inducing a roll moment about the centerline. A rolling
moment banks the airplane and tilts the lift vector to
one side. The horizontal component of the lift vector
accelerates the aircraft laterally, thereby curving the
flight path. Equation ( 15 ) solves for the minimum
radius of turn, R.
V
g n 1
13.4
1.0
( 15 )
13.2
13.0
CL
12.8
0.6
12.6
12.4
0.4
Because of our relatively small load factor, n, we obtain
a value of 10.5 km for our turn radius. The UAV is not
capable of performing a sharp turns; this is not a
problem as we will have adequate warning for any turns
that need to be made and the controller can take into
account minimum turn radius. Equation ( 16 )
describes the turning rate (degrees/time) for the UAV,
how large your turn is, in degrees, per unit time.
d
g n^ 2 1
dt
V
13.6
1.2
0.8
2
2
13.8
12.2
0.2
Cl
SELIG Data
12.0
Cl/Cd
0.0
11.8
0
0.5
1
1.5
2
2.5
3
Angle of Attack
3.5
4
4.5
5
Figure 7: CL vs. for CFD (Green) and Selig (Red)data
CL/CD vs. for CFD (Blue)
( 16 )
outlining the 2D airfoil obtained from Professor Selig’s
database and resizing it for our chord length.
Once FLUENT reads the mesh we specify
the atmospheric and flying conditions. In this case the
closest to Martian atmosphere that can be used is an
environment of carbon dioxide. In FLUENT we set
the fluid properties to the values from Table 1 in the
section on atmospheric data and a gravitational
constant of 3.72 m/s2, roughly 4/10ths the magnitude
of gravity on earth. Boundary conditions are set that
specify the pressure far from the airfoil and the velocity
in terms of x-y components and Mach number. The xy components allow us to vary the angle of attack
without the need of creating a new mesh for each angle
of attack we want to test
With fluid and environmental properties set
we determine the appropriate method to use to
perform calculations. Since we are flying in with a low
Reynolds number we use a laminar boundary regime.
To verify our assumption about the Selig data
it is necessary to run simulations at several angles of
attack. With a chart of this data we can compare the
CFD data with that from Selig and find that, while they
do not lie directly on top of each other, they both yield
an acceptable coefficient of lift for an angle of attack
between two and three. The CFD data gives slightly
higher CL values than the Selig data. Since we are
backing up an assumption based on experimental data,
not determining values, this inconsistency is acceptable.
If this error were on the side of lower lift we would
have to do more calculations to make sure there is no
problem. As this is not the case, it stands that our
assumption regarding the validity of the Selig data is
acceptable.
Fluent Analysis (Selig Data Verification)
It is stated in the aerodynamic assumptions
section that Professor Selig’s data for his numerous
airfoils are correct. Using Fluent, a computational fluid
dynamics (CFD) package, we justify this assumption
with appropriate calculations. While the Selig airfoils
are normalized by Reynolds number, Martian
conditions vary greatly from those in Professor Selig’s
wind tunnel.
The first step to CFD is creating a mesh
containing the airfoil in a large space with boundary
conditions to simulate the Martian environment for our
airfoil. This is done, using GAMBIT, from grid points
Figure 7: FLUENT Pressure Gradient Around Airfoil
(Red = High Pressure Blue = Low Pressure)
Figure 6
10
C L /C D
R
1.4
.
Propeller Design Overview
From past Mars aircraft concepts and high
altitude, low speed Earth aircraft, propellers have been
the preferred choice. Our choices for powering an
electric motor are: batteries, fuel cells and solar cells
(see discussion on solar cells in the Electrical section.)
As a result of the lower speed of sound on Mars, due to
low temperatures, and density about one-hundredth
that of Earth’s, our effort focuses on generating the
necessary amount of thrust, as well as keeping the tip
speed of the propeller below supersonic conditions. If
the tip Mach number reaches 0.85, there will be a large
drop in the propeller efficiency due to the flow
separation and formation of shockwaves.
Propulsion Design
Introduction
Low atmospheric density and the lack of
appreciable amounts of atmospheric oxygen complicate
the propulsion for a Mars airplane. These constraints
lead to the consideration of propulsion options that are
more restrictive than those of Earth.
The analysis carried out in the propulsion
section of this report is based on an airplane that is not
landing intact on the surface of Mars once flight is
completed; if an airplane is intended to land or take-off
from Martian soil, a new set of design specifications
need to be considered.
Propulsion Selection
Since the use of a combustion engine is not
feasible due to the lack of oxygen, our choices for the
propulsion subsystem are limited. There are two
methods to propulsion we consider for Martian aerial
flight: chemical propulsion and propeller driven
propulsion by an energy source.
The use of monopropellant rocket thrusters
enables combustion without the need for atmospheric
oxygen, by carrying chemical compounds that burn
spontaneously when ignited. It provides the UAV with
uniform thrust; however, once ignited, the process
cannot be stopped until the fuel runs out.
Bipropellant thrusters, on the other hand,
carry fuel and oxidizer separately. They are more
practical in this case since the thruster can be turned on
or off in order to maintain cruise speed at V(L/dmax).
Bipropellant thrusters, however, tend to be more
complicated to design. The thrusters found for our
design constrains are capable of generating anywhere
from 5 to 20 N of thrust and have a specific impulse,
Isp, in the range of 300 to 350 seconds. Isp, a key
performance parameter for rockets, is defined as the
thrust that can be obtained with a propellant weight
flow of 1 unit per second. Modern large scale rockets,
like the one found on the Shuttle, can achieve a
maximum Isp of around 450 s.
The second approach to propulsion we
consider is the use of energy from an on-board battery,
nuclear device or an off-board energy source, such as
solar energy, to power a propeller. Solar powered
airplanes must have a large projected area to collect
sufficient solar power and are inefficient when the solar
intensity is low, as it is on Mars.
Solid rocket propulsion is inherently simple;
yet, as mentioned before, there is no way to control the
thrust once ignited. Bipropellant thrusters run the risk
of explosion due to low atmospheric temperature on
Mars. Our calculations also indicate that for the same
weight, a battery driven propeller would yield a much
greater range than for a bipropellant thruster, so we
select propeller as our form of propulsion
Propeller Placement
Examining the advantages and disadvantages
of propeller placement along the fuselage places the
propeller at the rear of the fuselage. The main
advantage in using a pusher is in the aircraft’s capability
to fly in undisturbed air. With a tractor propeller, the
aircraft flies in the turbulence from the propeller wake,
which could lead to additional drag.
Drag Calculations
The UAV will be operating at steady, level
flight, where all the forces will be in equilibrium,
meaning that thrust must balance the drag in order to
keep the UAV at a constant cruising speed.
C D C DP C DI C DC
( 17 )
Equation ( 17 ) calculates the total drag on the
aircraft, where CDp is the parasite drag coefficient (also
known as skin friction drag coefficient,) CDi is the
induced drag coefficient and CDc is the drag due to
compressibility. CDc becomes significant when the
craft approaches sonic condition. However, because
the UAV will operates at subsonic speed, CDc is be
neglected.
C DP ,wing
C f k swet
( 18 )
4
The parasite drag, coefficient from the wing is
solved in equation ( 18 ), where Cf and k are roughness
constants based on the wing Reynolds number and Swet
is the total wetted area for the wing. Similarly, we are
able to determine the parasite drag coefficient for the
tail and the fuselage. Assuming that the wing, fuselage
and tail contribute to 95% of the total skin friction
drag, the overall parasite drag coefficient is determined
to be 0.02225.
11
addition, the use of propfans, which feature 8 to 10
wide, short blades of sweptback planform are
considered for blade configurations. If a propfan blade
configuration can be utilized, being powered by an
electric engine, opposed to the standard turboprop
engine, it would be an option worth considering.
Although counter-rotating blades and propfans were
investigated as ways to improve propulsion, the
aforementioned roll moment is beyond our current
level of expertise.
2
C DI
C
L 0.016
Ae
( 19 )
Using equation ( 19 ) we solve for the induced
drag coefficient, where CL is the wing lift coefficient, A
the wing aspect ratio, and e the Oswalt efficiency factor.
Combining the parasite and induced drag coefficients
gives an overall drag coefficient of 0.0394.
Thus we can determine total drag force
experienced by the aircraft, from equation ( 20 ), to be
3.14 N.
1
D C D V 2 S 3.14 N
2
D prop 0.54 Pengine 2.27m
( 20 )
Propeller Efficiency
As noted earlier, in the section it is essential
that we keep the tip speed of the propeller under M =
0.85 or 195 m/s. The helical speed, the tip velocity on
a moving aircraft, is the sum of the rotating speed at
the tip of the propeller and the freestream velocity,
calculated in Equation ( 23 )
Motor Power Specification
With the thrust required for level flight
known, we specify the amount of power the motor
needs to produce in order for the propeller to generate
that much thrust.
TVo prop Pengine
( 22 )
V
( 21 )
We determine the engine brake horsepower, Pengine,
where T is the thrust required to maintain level flight,
V is the flight velocity and η is the efficiency of the
propeller. Since the UAV will be cruising at V(L/Dmax)
the flight velocity is 130 m/s (see aerodynamic section
for more details.) For a propeller efficiency of 95%,
The engine will produce a power of 430 W or 0.58 HP.
Although calm flight conditions are assumed,
it is highly likely that there will be significant wind gust
that will increase the drag value. Taking this factor into
account, we impose a safety factor of 1.2. The
propeller must therefore be capable of generating 3.77
N of thrust if necessary to maintain leveled flight; this
corresponds to a maximum engine power of 490 W or
0.675 HP.
Vtip V freestream
( 23 )
Vtip nD
( 24 )
2
tip helical
2
The stationary tip velocity is calculated in
Equation ( 24 ),where n is the rotation speed in
revolutions per second and D is the diameter of the
propeller. With a helical tip speed of 195 m/s, we
obtain propeller rotation speed of 20 revolutions per
second, or 1200RPM.
The overall propeller efficiency is expressed in
terms of the advance ratio v/nD, thrust coefficient CT,
and power coefficient CP in equation ( 25 )), where CT
and CP are defined in equations ( 26 ) and ( 27 ). The
resulting propeller efficiency of approximately 93% is
very close to the 95% value we assumed initially in
calculating power.
Propeller Diameter
Using Equation ( 22 ), we determine the
diameter of the propeller from the brake horsepower
of the engine. Note, this diameter is equivalent to the
length of our wing span; as the propeller rotates an
induced roll moment is generated. We further explore
the possibility of using counter-rotating blades.
Counter-rotating blades have mainly two advantages:
they are more efficient at high Mach numbers than a
single propeller configuration and they allow a smaller
diameter blade, allowing them to spin at higher RPM
without a loss in aerodynamic efficiency. By having
counter-rotating blades, our propeller diameter will be
decreased considerably while maintaining the same
efficiency. However, the extra blades will increase the
weight compared to the use of a single propeller. In
CT
CP
12
v CT
n * D CP
T
0.0188
n 2 D 4
P
0.056
n3 D 5
( 25 )
( 26 )
( 27 )
Propeller Pitch
The pitch is the theoretical distance the
propeller will advance along the axis of rotation in one
complete revolution. There are two types of propellers:
fixed pitch and variable (controllable) pitch.
In a fixed-pitch propeller, the pitch is set by
the manufacturer and cannot be changed by the pilot.
There are two types of fixed pitch propellers: the climb
propeller and the cruise propeller. The climb propeller
has a lower pitch, which therefore leads to less drag.
This results in the capability of higher RPM and more
horsepower being developed by the engine; such will
increase performance during takeoffs and climbs but
decrease performance during cruising flight. On the
other hand, the cruise propeller has a higher pitch and
therefore more drag which results in lower RPM and
less horsepower capability. Performance during takeoff
and climb is therefore decreased; yet, efficiency during
cruising flight is increased.
Contrary to the fixed pitch, a variable pitch
propeller permits the pilot to select a pitch that will
result in the most efficient performance for a particular
flight condition. Since we are solely dealing with cruise
flight conditions, we select the fixed pitch cruise
propeller for its simplicity and performance.
blade will be traveling at different speeds. A small twist
in the propeller blade must be incorporated to ensure
that each section advances forward at the same rate
which stops the propeller from bending.
Designing propeller blades takes a great
amount of expertise and years of experience. Since it is
beyond our level of expertise, we will not determine the
exact pitch, shape, twist, and airfoils for the propeller.
Propulsion Summary
As previously mentioned, the power
consumed by the propulsion system will be 430 W/hr.
The 4.2 kg of battery that is carried onboard will
generate a total of 1050 W, which allows the UAV to
stay aloft for approximately 2.3 hours. At a cruising
speed of 130 m/s, this corresponds to a range of 1076
km.
Structural Design
Introduction
In structural aspects, the objective is to design
and verify the safety, stability, and reliability of the
unmanned aerial vehicle. Both the wing and fuselage
will be hollow in order to minimize weight and house
instrumentation needed for the mission. The structure
must also be able to withstand outside forces as well as
its own weight.
Propeller Blade Design
In propeller design, deciding the number of
blades to incorporate is essential. An optimization
among efficiency, thrust and weight shows that a threebladed propeller is preferred. Not only is it capable of
producing more thrust than would a two-bladed
propeller, it is also lighter and more efficient than using
a four-blade propeller.
The tip section of the propeller revolves faster
than the root section; therefore, the Reynolds number
along the propeller changes as the radius increases. As
a result, one would have to select a different airfoil for
each section of the propeller blade.
Structural Design/Fabrication
Two procedures are considered in designing
the structural body of the unmanned aerial vehicle.
The first process consists of making a skeleton with
trusses and placing coatings of outer layers on top of
this system to form the external shell. The second
option is to make a mold out of Styrofoam or a similar
solid foam material in the exact shape of the aircraft
and then coating the outer layers of skin on top of the
mold. After the layers are set, the inner mold is
removed and only the thin shell remains, but shaped in
the form of the aircraft.
The option implemented in this project is the
latter process of coating a mold. This is primarily due
to weight considerations. Although trusses increase the
weight of the aircraft, a few trusses will be used for
support. The trusses will serve solely for structural
purposes, and not to form the shape as do the trusses
in the first process.
The coating of the aircraft will consist of three
layers: a base layer, a middle body layer, and a surface
finish. The materials chosen for the first two layers
must have a low density to optimize weight, but must
also be structurally sound. In addition, the materials
must be capable of withstanding the extreme
temperatures in the Martian environment, which reach
on average -63°C on the surface. The material picked
Figure 8: Propeller Blade Illustration
The optimum airfoil thickness will be around
15 to 18 percent near the root, progressively thinning
to 10 percent at the tip.
Propeller blades are in fact wings themselves,
producing a resultant aerodynamic force that may be
resolved into a force pointing along the axis of the
airplane. Thus, similar to the airfoil for our wings, the
blades should have a high aspect ratio in order to
minimize drag. An elliptical-based shape blade with a
rounded tip would yield optimal performance.
As the propeller spins, each section of the
13
for the bottom layer is 0.1mm aluminum. The body
layer will be 0.5mm carbon fiber, and the outer layer
will be polished aluminum.
Wing
Several approximations are made in designing
the wing of the aircraft. First, the wing is treated as a
cantilever beam and second, as being hollow. The
following sections will explain further analyses on the
wing.
Figure 9: Wing Model
The thickness at the center of gravity, “y”, is
also highly approximated—the front face of the wing is
modeled as a 2-dimensional trapezoidal figure. From
our trapezoidal face, we can find a linear relationship of
thickness, y, to position along the length of wing, x.
Wing: Material Considerations
In choosing the wing material, the following
parameters are of importance:
Low density, ranging from approximately
1300 kg/m3 to 1700 kg/m3
High fracture toughness (FT) approximately
1.0 x 105 Pa-m1/2
High tensile strength that is capable of:
a) Supporting instrumentation weight
b) Resisting forces of lift, 44.0 N
c) Resisting forces of drag, 3.20 N
d) Resisting forces of gravity
Usage temperature between -80oC and 40oC
Easily molded, shaped, and machined
y@root y@tip
x y@root 0.0116 x 0.0185
y
l
total
wing
Upon determining the horizontal component of the
center of gravity, we can find the thickness at this
point, y. Values can be found in table 7.
Carbon
Fiber
Aluminum
Center of Gravity (m)
Thickness (m)
Base (root/tip) (m)
Height (root/tip) (m)
Length (m)
Y (m)
1500
0.4342
0.0005
0.422
0.037
1.039
0.0135
2700
0.4342
0.0001
0.422
0.037
1.039
0.0135
I (m4)
Total Volume (m3)
1.781e -6
2.469e-4
1.781e-6
2.469e-4
Mass (kg)
Force, weight (N)
Force, lift
0.3704
1.370
22.0
0.6667
2.467
22.0
Moment (Nm)
Stress (Pa)
8.957
8.347e5
8.481
7.903e5
Material
Density(kg/m3)
Given these material parameters, we identify carbon
fiber to be optimal; its material characteristics are
shown in Table 6:
Property
Value
Density (kg/m3)
1500
Fracture Toughness (Pa-m1/2) 5.7
Tensile Strength (MPa)
13.9
Young’s Modulus (GPa)
71
Hardness-Vickers (HV)
42
Temperature, min (C)
Temperature, max (C)
( 28 )
-273
2002
0.152
0.0129
0.152
0.0129
Table 7: COG thickness and Aluminum Stress
Analysis
Table 6: Carbon Fiber Properties
Wing: Stress Analysis
It is crucial that the structure of the UAV be
strong enough to withstand aerodynamic forces while
in flight. We therefore perform stress analysis on the
wing to verify its capability of flying in Mars. The
overall wing dimensions are known based on
calculations from aerodynamics; the thickness of the
hollow wing is dependent upon the yielding of carbon
fiber. The wing is approximated as a cantilever beam
with its airfoil modeled as a rectangular cross-section,
as seen in Figure 9.
Varying wing thickness corresponds to
varying values of mass—and therefore, varying values
of gravitational force.
Because the aircraft is
lightweight, the force of gravity is nearly negligible.
This force of gravity and 44 N force due to lift provide
the moment used to determine bending stress. The
moment of inertia for the approximated rectangular
cross-section is determined at the center of gravity.
I I outer I inner
1
3
bh 3 b 2t h 2t
12
( 29 )
For a wing of 0.5mm thickness, we can
calculate the bending stress.
14
My
0.8347 MPa
I
( 30 )
Thus, since the yield stress of carbon fiber is
known to be 300MPa, we can conclude that a wing of
0.5mm thickness will not yield.
Performing similar calculations for the inner
aluminum core layer, we calculate a bending stress of
0.7903MPa. In comparison to its yield strength of
approximately 20MPa, we confirm that the aluminum
will not yield. Results are depicted on table 7.
the fuselage; the batteries would therefore be on the
top and mid floor.
Fuselage: Thermal Design
(Note: all the equipments will be placed inside
the fuselage; therefore we are solely concerned about
designing a thermal control system for the fuselage
only)
The main purpose of having a thermal control
system is to maintain batteries and instruments at their
optimal operating temperature. There are two basic
approaches to the design of a spacecraft’s thermal
control system – passive and active. Passive control
operates by using appropriate materials and surface
finishes so that the fuselage temperature remains within
acceptable range of temperatures. The latter uses
mechanical or thermoelectric devices. For instance, the
UAV would consist essentially of a central thermal
transfer bus, a fluid loop transporting the heat from the
radiator to the individual components. We choose a
passive thermal control system because it is more
reliable and easier to design than an active one.
The ideal operating temperature range for our
instruments is approximately 270-290 K. Due to the
extremely low temperature on Mars and the fairly high
velocity that we will be flying at, heat losses due to
conduction and convection would be significant.
Therefore, we want to incorporate a high-absorptance
and low-emitting metallic surface. This would
allow the UAV to trap as much heat from radiation as
possible while emitting relatively a little amount. The
optimal fuselage equilibrium temperature would be
obtained by varying values of and through the
following heat balance equation:
Wing: Buckling
After determining that the wing will not yield,
it is important to confirm that the wing will not buckle.
Pcr, critical load, is found at the tip of the
wing, where buckling is most likely. The load that the
UAV will experience due to lift and gravitational force
of each material is approximately 26 N, well under the
critical load of 1613 kN. Thus, the wing will not
buckle.
Pcr
2 EI
L2
1.613e6 N
( 31 )
Fuselage
Once we have established the dimensions of the wing,
we must now consider the design of the fuselage. The
shape of the fuselage will be one similar to sailplane
design, for weight minimization and aerodynamic
purposes.
Fuselage Interior
In order to accommodate the various
instruments required in this mission, the interior of the
fuselage will consist of three floors. These floors will
be made of honeycomb sandwich structure (Figure 10).
Among the advantages of using honeycomb are
lightweight, high crush strength and stiffness, structural
integrity and high fatigue resistance.
As / cTeq Qconduction Qconvection
4
AsJ s APJ a APF12 J P Qint ernal
( 32)
The left hand side of the equation consists of
the heat that is escaping the system. The term
As/cTeq4 is the heat loss due to radiation. Q conduction
and Qconvection are heat losses due to conduction and
convection, respectively. As/c is the total surface area
of the UAV. is the Stefan-Boltzman constant
(5.67x10-8 W/m2K4). The right hand side of the
equation is the sum of the heat being absorbed by the
system. The term AsJs is the heat addition from solar
flux of the sun. ApJa is the heat addition due to
planetary albedo. ApF12Jp is the heat addition from
planetary radiation. Finally Qinternal is the internal heat
generated by the various instruments. {As and Ap are
the projected areas of the UAV in the directions of the
sun and the planet respectively. Js is the solar radiation
intensity on Mars (590 W/m2). Ja is the albedo
contribution to the total radiation input to the UAV,
which is defined as the product of Js, a (average Mars
Figure 10: Honeycomb Structure
The honeycomb structure material will be
made of aluminum, due to its smooth and thin cell
walls, in addition to the high strength-to-weight and
stiffness-to-weight ratio.
Particular instruments must be laid out in
specific locations within the fuselage; for example, the
LIDAR will be placed on the base floor. For the
LIDAR to serve its purpose, this part of the fuselage
base will have glass material as a “window.” The shaft
and motor will be further back, towards the tail end of
15
albedo, 0.15), and visibility factor F, which is dependent
on the altitude of flight and the bearing angle.}
We can model heat loss due to conduction as
a 1 -dimensional conduction problem.
of the materials that we considered along with their
properties:
Figure 11: Model of heat loss as conduction
The total heat transfer via conduction can be
expressed in equation ( 33).
Tatm Teq
qx
1
L1
L2
[( ) (
)(
)]
hA
KalA
KcfA
Nu L K
L
a/e
Equilibrium
Temperature
(K)
Polished Aluminum Surface
0.35
0.004
8.75
265
Polished Stainless Steel
0.50
0.130
3.85
n/a
Polished Copper
0.28
0.130
2.20
n/a
Grafoil
0.66
0.340
1.90
n/a
Vapor-blasted Stainless Steel
0.60
0.330
1.80
n/a
Gold/Kapton/Aluminum
0.53
0.420
1.260
n/a
Gold-plate on Aluminum
0.30
0.040
7.50
261
Fuselage: Material Selection
The fuselage itself is modeled as a pressure
vessel. The entire structure is assumed to be sealed off
when it is built; therefore, it would contain Earth’s
atmospheric pressure (100 kPa). However, the ambient
pressure on Mars is so low (700 Pa) that there would be
significant pressure drop between the pressure inside
the fuselage respect to the atmospheric pressure.
Because air in a high pressure region tends to move to
that of a lower region, there would be a tremendous
force expanding outwards. The function of a pressure
vessel is to essentially contain pressure P. The main
objective is to do so while minimizing weight. A
constraint involving this would be that the pressure
vessel must leak before it breaks. This ensures that if a
crack exists, the leak would release pressure gradually
and thus safely.
Based on these objectives and constraints, it is
essential that we determine the appropriate material
indices, which would help us assess the optimal
materials. We can idealize the pressure vessel as a thinwalled cylinder with an average radius R and thickness
t. The wall thickness is chosen so that at a certain
pressure difference, the stress is less than the yield
strength of y of the material. The stress should also
be less than the fracture stress, at which point a crack
would propagate in the vessel. It is however, notable
that there would be no worry of crack propagation if
the stress is kept under the yield stress—this ensures
stable deformation. Such is expressed in equations
( 28 ) - ( 37 ).
( 34 )
( 35 )
The Reynolds number is approximated to be
280,000. The Prandtl number is somewhere around
0.76. As expressed in equation ( 36), h is simply a
function of the Nusselt number, conduction coefficient
k of the ambient, and L the length of the flat plate.
h
e
The temperatures of Steel, Copper, Grafoil,
and Gold/Kapton/Aluminum of Table 8 are found to
be well under 265K and therefore not applicable.
Thus, based on the values and given equilibrium
temperatures, in Table 8, our chosen external thermal
layer will be one of polished Aluminum surface.
Equation ( 34) expresses h as the convective heat
transfer coefficient, A as the surface area of the
fuselage, Tatm, Teq as the atmospheric and equilibrium
fuselage temperature, respectively. In order to obtain
the convective heat transfer coefficient h, we use the
Nusselt correlation of equation ( 35) for flow over a flat
plate.
NuL 0.664 Re1/ 2 Pr1/ 3
a
Table 8: Metallic Surface Materials - Property Table
( 33 )
where Tatm is the average ambient temperature (230 K)
at our cruise altitude, h is the convective heat transfer
coefficient, A is the surface area of entire fuselage, L 1 is
the thickness of the aluminum (0.1mm), L2 is the
thickness of the layer of carbon fiber (0.5mm), and K is
the thermal conductivity of aluminum and carbon fiber
respectively. After plugging in values for all the
variables, the equation is reduced down to 1.4(230-Teq).
Next, we model heat losses due to convection
by the fuselage as fluid flowing pass a flat plate. The
total heat transfer via convection is defined in equation
( 34).
Q hATatm Teq
MATERIAL
( 36 )
Now that all the terms in equation ( 32) are in
terms of and Teq and Teq, we can select metallic
surface finishes with reasonably and low values that
would give us comfortable temperature for the
instruments to be operating at. The following is the list
16
K
ac C 1C
y
2
M4 is expressed in Figure 13 —strong, light
materials lie near the top of the figure.
2
( 37 )
Maximizing the material index, M1, will
maximize tolerable crack size.
M1
K1C
y
( 38 )
Leaks in the pressure vessel caused by a crack
can be detected if the crack is just the size to penetrate
the inner and outer surface while maintaining vessel
stability. We must note that the wall thickness is such
that it will not yield. Thus, a maximum value of the
material index M2 indicates safe containment of
maximum pressure.
y
M4
Figure 13: Specific Strength Chart of Materials
( 39 )
Based on these material indices, carbon fiber
is chosen for the fuselage structure.
While maximizing M1 and M2, we keep in
mind that minimizing wall thickness is an important
objective. Since small values of wall thickness indicate
high numbers of yield stress, we try to maximize yield
stress for our material. Thus, another material selection
criterion would be to maximize index M3.
M3 y
Propeller Shaft
A cylindrical shaft in the tail end of the
fuselage interior will connect the propeller and the
motor. Conventionally, the shaft is 1/20 of the
fuselage diameter. We will perform calculations of
torsion to determine the minimum size that is required
of a shaft of carbon fiber.
The total torque created by the propeller is
approximately 5330 Nm; this is calculated by the force
generated by the propeller, taking all three blades into
account. Using the Tresca yield criterion, where
max=y/2, we use equation ( 42) for maximum shear
stress to find an optimum shaft radius.
( 40 )
Because our vessel is in fact an aircraft, weight
is crucial. For minimizing weight, we must further find
a material in which the material index M4 is maximized.
M1
K1C
y
( 41 )
max
Once the four material indices have been
found, a material selection chart is referred to. Figure
12 is one of fracture toughness (K1c) versus elastic
limit (y). The diagonal line corresponds to M2,
expressing the constraint that the vessel must leak
before it breaks.
T
c3
2
( 42 )
With a safety factor of 2, we result in a shaft
diameter of approximately 0.0712m.
Performing
weight calculations based on density, we find that using
the given diameter, the shaft will weigh 6kg—this
exceeds our initial weight constraint. We further
continue our shaft analysis by making the shaft hollow.
C2
C1
Figure 14: Shaft Diagram
Figure 12: Fracture Toughness vs. Elastic Limit
17
The equation for maximum shear stress is now
illustrated in equations ( 43)-( 44).
max
J
c
2
Tc2
J
4
2
c1
finish, the total mass is considered negligible. Weight is
therefore calculated as the product of the surface area,
the thickness, and the density of the material. A small
area of glass fiber, to accommodate the LIDAR
instrument at the base of the fuselage, is noted.
Including the shaft and propeller as part of the
structure, the UAV will have a structure of 2.97kg.
Note Table 9 for specific weights.
( 43 )
4
( 44 )
Table 9: Specific Weights of Chosen Materials
Performing calculations, we achieve a shaft
radius of approximately 0.03m. For a safety factor of 2,
this will increase to approximately 0.0815m. The mass
is still too large, at around 1.73 kg. It is therefore
necessary to decrease the length of the shaft to around
0.25m, in which case the mass will decrease
considerably, to around 0.43kg. Thus, the motor must
be designed to fit into a tube with a diameter of
approximately 0.09m.
Structures Conclusion
For our given structure, bending moment and
buckling analysis is done on the wing, in addition to
pressure vessel analysis on the fuselage. We can
therefore verify that our structure is both stable and
sound—the wing will not yield nor buckle and the
fuselage will not break given our dimensions. Our total
structure weight achieved is approximately 3 kg.
Surface
Total
Thickness
Density
Electrical
and
Systems
Design
Area
Mass
3
(m)
(m2)
(kg/m )
(kg)
Introduction:
The0.0005electrical
systems sub-team
0.827
1500 and 0.6203
concentrates
on mapping
the topography
1.200
variable
1500
0.6000 of Mars given
weight parameters set by the structural sub-team. An
0.125
0.0005
1500
0.0938
electrical
system
needs to
power and
control the plane,
n/a
n/a
1500
0.4300data and flight
as well as gather topographical
n/a
n/a
1500
0.6000
information.
Listing flight-critical
sensors and datagathering equipment is the first step in the design
process. We compile a chart of mass and power
consumption
based on
trade studies, then
0.827
0.0001
2700initial 0.2233
consider
instrument
networks
to
provide
data storage
1.200
variable
2700
0.3600
and distribution capabilities. Once a general idea of
0.125
0.0001
2700 forms,
0.0338
equipment
and
power supply
we reduce mass in
light of flight time optimization by using lighter and
more
efficientn/asensors
along with more
0.827 energy
0.0001
Negligible
advanced
energy
sources.
1.200
0.0001
n/a
Negligible
The overall mass for the instruments is 7.80
0.125
0.0001
n/a
Negligible
kg with an energy consumption of 459 watt-hours.
Fuselage
Wing
Tail
Shaft
Propeller
Fuselage
Wing
Tail
Fuselage
Wing
Tail
Assumptions:
0.009
0.0151are made in the
The0.0007
following2500
assumptions
design of the UAV electrical systems:
Fuselage
1.
Overall Structure Weight
Keeping the structure stable and lightweight is
crucial for the UAV. Overall structural weight is based
on the surface area and material thicknesses. The UAV
can be divided into three sections, being the tail, wing,
and fuselage. Each of these three sections will have
three layers of material—the external thermal layer and
inner aluminum core layer each being 0.1mm thick, and
the structural carbon fiber layer being 0.5mm thick.
Because the polished aluminum is merely a surface
2.
3.
4.
18
0.1000
TOTAL
2.9761
operating temperature inside
The
the UAV is
greater than 0C.
There are no directional magnetic fields
present to adversely affect navigation.
There will be a network of Mars-orbiting
satellites as outlined by NASA. This will
enable direct line-of-sight communication
with the UAV at all times.
All instruments are customizable for the UAV
and Martian environment. Electronics will be
radiation-hardened to ensure adequate
5.
6.
performance during transit and on Mars.
All wiring will be shielded to prevent
electromagnetic interference and to reduce
transmission losses.
The mean-time-to-failure (MTF) of all
instruments is much greater than the expected
duration of the mission, which includes transit
time and time spent on Mars.
Manufacturer & Product
Name
Aeroflex RadHard
UT80CRH196KDS
Aeroflex ACT5108 RadHard
Motor Driver
Cognex MVS-8100D Digital
Frame Grabber
DSP Arch. DSP24 24-bit HP
Digital Signal Processor
Aeroflex UT28F256 LV
PROM
SEAKR NV-CPCI NonVolatile, Solid-State FLASH
Constraints:
The following constraints are imposed on the
design of the UAV based on current technologies and
design methodologies:
1.
2.
3.
The total mass of all instruments must be less
than 8 kg to accommodate the aerodynamic
and structural constraints listed earlier.
The data rate used for communications is
limited to 480 MB/hr based on a two-antenna
design and UHF frequencies.
The oxygen-deficient atmosphere prevents
the efficient use of fuel-cells as a potential
power source
Function
Power
MCU
0.48 W
Motor
0.2 W
Video
3W
Comm
2.48 W
Memory
1.5 W
Memory
3W
Table 11: Micro-controller Instrumentation
Microcontroller Unit and Memory:
Table 11 lists the components that comprise
the main micro-controller unit. All circuit components
are radiation-hardened to at least 300 Krads during the
fabrication, design, and layout processes to ensure they
perform as expected after a three to six month transit
period and during the two hour mission on Mars.
Electronic circuits are exposed to approximately 1.75
Krads[Si]/year in space when shielded with 50 mils of
aluminum, with a slightly higher number (10 krads[Si])
during solar storms. Therefore, the radiation-hardened
components are capable of withstanding several years
of exposure without side-effects.
However, radiation-hardening requires larger
layout footprints and more conservative transistor
designs, resulting in slower switching speeds and larger
Instrument Selection:
Table 10 lists the UAV instruments and their
respective mass, power consumption, operating
temperatures, and physical dimensions.
The following sections discuss the trade-offs
and specifications for each instrument. Important
sections such as power management, communication,
and navigation are considered in more detail followed
by a high-level block diagram of the system.
Name
Mass (kg)
0.003
0.004
0.002
0.5
Power
(W)
0.045
0.125
0.053
0.1
Op. Temp
Dimensions
(C)
-40 to 125
7 mm x 7 mm x 3 mm
-54 to 120 1.65 mm x 1.2 mm x 0.4 mm
0 to 85
18.9 mm x 17.5 mm x 7.6 mm
> -5
variable
Analog Devices ADT7317 (x3)
Endevco 32394 Si MEMs Pressure Sensors (x2)
Motorola MPXV5004G6U Low-Pressure Sensor
Safety, navigation, control transducers (mechanical
flaps, rudders, elevators)
Analog Devices ADXL150 Accelerometer (x3)
Analog Devices ADXL105 Accelerometer (x3)
Analog Devices ADXRS150/300 Gyroscope
Cognex CDC-100 CMOS CCD
General Atomics LIDAR Receiver
Triple-Junction Photovoltaic Compass
Li-Ion SPE Batteries
Microcontroller Instrumentation
DC Electric Engine
Patch Antenna (x3)
Total
0.015
0.006
0.062
0.11
0.12
0.015
4.2
0.21
1.8
0.75
7.80
0.054
0.041
0.126
2.5
1
N/A
-1050/hr
10.2
430
15
459/hr
-40 to 85
7 mm x 7 mm x 3 mm
-40 to 85
7 mm x 7 mm x 3 mm
-40 to 85
7 mm x 7 mm x 3 mm
0 to 45
34 mm x 31 mm x 47 mm
> -10
53 mm x 64 mm x 33 mm
> - 10
90 mm (diam) x 240 mm
> -20
140 mm x 140 mm x 140 mm
0 to 50
136 mm x 93 mm
N/A
> -10
50 mm x 50 mm
0C (min)
Table 10: Instrument Selection
19
areas compared to commercial designs. The trade-offs
are improved durability in harsh-environments and
lower power consumption due to lower transistor
densities - both of which are critical factors in the UAV
design.
The UT80 MCU is a 16-bit microcontroller
designed to run on 20 MHz clock and industrystandard MCS-96 RTR architecture, which ensures
compatibility of out-sourced software design. The 1
KB of internal SRAM is insufficient for all sensor and
image data; therefore, the UT28F256 PROM and
SEAKR FLASH external memory are added to
augment data-storage capabilities. The UT28F256
external LV PROM adds an additional 256 KB of nonvolatile memory, which is used to primarily store the
temperature, pressure, acceleration, and gyroscope
sensor data using a sample rate of once per second.
The SEAKR NV-CPCI FLASH chip allows for 1 GB
of non-volatile memory with a maximum data rate of
27 Mbps and 3 W of power dissipation. The FLASH
chip will be primarily used to store high-resolution
images and LIDAR data. Table 12 lists the properties
and memory bits required for each sensor and camera
type. Extra bits are required for the Endevo pressure
sensors to provide the required 8.62 mV/psi sensitivity.
Similarly, due to the aerodynamic precision required
once in flight, at least 10-bits of resolution is needed
Sensor Type
Quantity
Total Bits
ADXL150/105
3/3
60 bits @ 10-bits each
ADXRS150/300
3/3
60 bits @ 10-bits each
Endevo 32394
2
24-bits @ 12-bits each
Motorola
MPXV5004G6U
ADT7317
1
8-bits @ 8-bits each
2
20 bits @ 10-bits each
ThermalTab RTD
1
10-bits @ 10-bits each
Total
18
182 bits (22 bytes)
Software programs, such as navigation algorithms and
communications protocol will be stored on the internal
SRAM to allow for faster data-transfer rates to the
MCU registers.
LIDAR and Camera:
The LIDAR unit, provided by General
Atomics, includes a frequency-doubled Nd:YAG pulse
laser, dual microchannel plate CCD detector, scanning
mirror, and light-weight collection lens required for
numerous high-resolution images. The unit is located
in the nose of the UAV. In order to provide maximum
coverage of the landscape, the scanning mirror,
powered by a low-power DC motor, provides a fast
horizontal scanning motion at several thousand points
per scan. Based on the method developed by Lathrop
et al., the CCD detector gathers all of the reflected laser
intensity per scan. A horizontal resolution of much
better than two meters is possible with this unit, which
is a significant improvement over the LIDAR
instrumentation onboard current Mars-orbiting
satellites. The receiver specified by General Atomics
provides a resolution of 320x320 pixels at 4 bits/pixel
and a total of 50 kB/scan.
The Cognex CDC-100 HiRes CCD provides
1280x1024 resolution at 8 bits/pixel of color with no
compression, which requires a total of 1.25 MB/photo.
The CCD interfaces with the Cognex MVS-8100D
listed in Table 11.
Power Management:
Initial energy source selections for the UAV
consist of (1) solar cells, (2) alternative electromagnetic
sources, (3) fuel cells, and/or (4) batteries. The primary
requirement for these energy sources is to provide
adequate energy to on-board instruments and motor,
specified by a minimum of 460 W for one hour.
Moreover, they must function within Martian
atmosphere; that is, they must function despite various
gas compositions, temperatures, distances from the
sun, and other factors. They must also be optimized in
light of the ratio kilowatt-hour (energy) per kilogram.
Trade-off analysis for the various selections
shows that, first, solar cells do not provide enough
required energy for flight alone or regeneration. This
fact is expressed by a specific area of 263 W for 1 m 2 of
a solar panel with a Martian efficiency of 28%, yielding
only 73 W/m2. Note that given a wingspan of around
2 m x 0.5 m, only 73 W can be achieved from a full
solar cell array. Additionally, since the energy per mass
value is only 32.2 W/kg after Martian considerations,
the extra mass might as well be spent on batteries or
fuel cells without regeneration.
The second alternative suggests implementing
a land microwave or laser electromagnetic targeting
source to beam energy towards the UAV while it is in
Table 12: Memory allocation and data storage
for distributed sensor package
for the gyroscope and accelerometer data in order to
resolve the analog output.
Given the memory requirements listed in
table 12 below, the Aeroflex UT28F256 LV PROM can
store over twelve thousand data sets given a sample
rate of once per second and 22 bytes per set. This
allows for over two hours of storage time, which is
adequate given the current mission specifications. The
SEAKR FLASH chip is also able to store hundreds of
images at any one time. In order to ensure a timely and
accurate transfer of data to orbiting satellites, a first-infirst-out (FIFO) queue structure will be implemented in
memory where old data will be transmitted first.
20
flight. The reason for the rejection of this alternative is
simple – there is no guarantee that any form of a land
station will be available for this purpose, while satellites
are too far away to be able to transmit and pinpoint at
these wavelengths accurately. The 0.3 cm-30 cm
wavelengths for microwaves and hundreds of
nanometer wavelengths for lasers implies that the
energies cannot be precisely targeted from the orbit.
We attempt using fuel cells in the third
alternative.
The fuel cell is an aspiring future
technology that generates a very high energy per mass
value. However, all existing fuel cell technologies require the
use of hydrogen and oxygen for the generation of
electric current. On the other hand, Mars is dominated
by CO2, nitrogen, and argon. One solution to the
paucity of hydrogen and oxygen is to bring along
pressurized/refrigerated gas tanks; another solution is
to produce oxygen via compressing CO2 in the manner
of the Mars In-situ Propellant Production (MIP).
As for now, the weight and size of a custom
MIP device is not readily available, nor has it made for
rapid collection of CO2 (only at night and low
temperatures of around 200 K) although an 8.5 kg,
40cm x 24cm x 25cm device has already been
demonstrated.
A fuel cell system will require the following
components to carry the necessary hydrogen and
oxygen onboard the UAV:
liquefaction. Moreover, pressurization requires an
entire system of compressors with the addition of extra
volume. The same volume concern holds if a
refrigeration system is used. As the volume tradeoff
shows, fuel cells without the best pressurization are not
optimal for an aircraft of this size, even if the mass
required for the energy supply is small.
Until the Mars In-situ Propellant Production
can provide immediate oxygen production, or until the
volume can be drastically reduced by using absorption
material or other Martian gases like nitrogen, fuel cells
for the UAV will have to hold.
Batteries:
Batteries are by far the more convenient and
readily available technology compared to fuel cells, and
require no peripheral equipment at a much more
compact volume.
A variety of battery types are
commercially available and under development, as
listed in Table 13 below:
Name
Lead Acid
NiMH
Li+
NaS
Li+ SPE
kWh/kg
0.035
0.07
0.15
0.11
0.25
Table 13: Comparison of battery energy/mass
ratios
Tanks (hydrogen, oxygen) with insulation
Fuel cell pressurization maintenance (or even
refrigeration) system
Fuel cell array and delivery
Control system
Mass and Containment Considerations:
Lithium ion Solid Polymer Electrolyte (SPE)
is the best contender among these existing
technologies. It provides the highest energy density,
around 1.5 to 2 times more than the currently existing
Lithium-ion battery technology. The sample that we
have chosen is under development by Ultralife since
2001, and is a feasible power source due to its nonatmospheric requirements.
A simple calculation at an allowance of 4.2 kg
gives 1050 Whr, while the volume of the battery is
around 400 Wh/liter or 400 kWh/m3; 1050 Whr yields
0.0026 m3 of theoretical battery space, or around 14cm
x 14cm x 14cm of volume. Compared to fuel cells, the
given mass-volume tradeoff is extremely reasonable for
our considerations.
Sources show that 1g of hydrogen fills 11
liters at 0°C and 1 atm. In order to reduce the volume
of the tank to reasonable levels, we can try to
pressurize the volume to around 2.2 liters at 5 atm on a
Martian surface pressure of 0.01 atm, which is a very
generous pressurization value. If the temperature in
the fuel tanks can be maintained at around -100°C, via
simple insulation and without extra refrigeration cycles,
the volume can fall to around 1.4 liters for 1 gram, or
0.7143 g/liter or 0.7143 kg/m3.
Given that we have at most 0.008 m3, or a
20cm x 20cm x 20cm, volume available for a H2 tank,
5.7 mg of H2 is required. In this case, the tank will fill
up 10% of the wingspan and nearly 82% of the
maximum fuselage area. Now consider that 1 kg of H2
gives 86 MJ of energy, which means that multiplying
5.7 mg by 86 MJ/kg we will have 491 kJ, or around 137
Whr, which is still less than the best batteries (>200
Whr) at the cost of a much larger volume.
This result only takes into consideration the
hydrogen tank. The oxygen tank adds to another part
of the fuselage, and is usually larger without
Navigation:
The absence of magnetic poles makes
navigation on Mars particularly difficult without a GPSlike system. Since the flight of the UAV will be
decided upon in advance and, in general, will be
relatively direct across the surface of Mars, the UAV
can take advantage of its on-board sensors such as
accelerometers and gyroscopes to detect any deviations
21
from its path. Such sensors should be sufficient to
ensure that the UAV stays on course once it has begun
its flight path. However, for the UAV to begin on the
correct flight path our design requires additional
sensors.
The photovoltaic compass (PV or sun
compass), based on InGaP/GaAs/Ge technologies,
can be used in the initial state of the plane’s launch to
detect the proper orientation of the plane relative to the
sun. Precise knowledge of the launch area on Mars will
make it possible to know what the proper angle to the
sun should be and this can be checked by the PV
compass throughout the flight. The design of the PV
compass is based on 26 small rectangular TripleJunction solar cells that are arranged in an octagonalcylinder fashion where the inward facing cells form the
walls and bottom of the cylinder. The top surface is
covered by anti-reflective fused Silica industrial-grade
glass that has a low refraction coefficient relative to the
Martian atmosphere, and low coefficient of thermal
expansion. The glass part of the PV compass will be
exposed to the Martian atmosphere at the top of the
UAV’s fuselage without altering the laminar flow over
the UAV. Incident sunlight will enter the PV compass
and strike certain solar cells. Based on the current
produced by each cell we can determine the angle of
the incident sunlight and thus the angle to the sun.
when the sun is directly overhead. This problem can
be avoided ahead of time by taking this problem into
consideration when planning the flight location and
time. Another complication is that our measurements
are accurate only when the UAV is flying parallel to the
Martian surface. This means that measurements made
during ascent/descent or turbulent flight should be
discarded. Fortunately we will ensure that the PV
compass is used only when the plane is in the proper
orientation by checking the accelerometers and
gyroscopes.
Communication:
In order to transmit the information gathered
by the array of sensors aboard the UAV, we have
included three UHF patch transceiver antennas in our
design. Only two of these antennas will be operating at
any one time, with the third antenna serving as a backup. We estimate the power requirement of two
antennas to be 15 W with a total mass of 0.75 kg for
the three antennas. One antenna will be one on each
wing with the third on top of the fuselage. The patch
antennas have a flat profile which can further be
reduced by placing them into indentations in the
surface structure.
These particular antennas are compatible with
existing satellite/rover communications equipment.
Rather than attempt to transmit directly to Earth, we
assumed that the UAV would be operating in an
environment where there would be multiple
opportunities to transmit data to Mars-orbit satellites.
By avoiding direct transmission to Earth, we save
power and thus weight aboard the UAV. Also, we
reduce the probability of corrupting the transmitted
signal. If the UAV could continuously transmit to a
satellite, our communications uplink capability would
be 8 MB/min per antenna. Implementing this design
with only the current satellites orbiting Mars, the
Odyssey and the Global Surveyor, would permit one 8
minute window during the flight to transmit all of our
data, which would have to be limited to 64 MB.
A
future
satellite
communications
infrastructure around Mars would increase the value of
the UAV’s mission by allowing for the transmission of
higher resolution images. Furthermore, this network of
communications satellites could serve as the backbone
of a navigational system for this and other missions to
Mars.
90 mm
215mm
37 mm
37 mm
37 mm
Software:
Software will be written in a combination of C
and Assembly based on industry-standard MCS-96
RTR instruction set architecture. External events will
be monitored using multi-level state diagrams clocked
at 20 MHz and eighteen separate interrupt service
routines (ISRs) such as the timer COMPARE interrupt
and UART RXC interrupt. A real-time microcontroller
Figure 15: Photovoltaic Compass
With this design, we can detect 26° of
incidence across each solar cell and can determine the
angle to the sun with high precision based off of
partially lit cells. One shortcoming of the PV compass,
however, is the ambiguity of direction that remains
22
operating system can be used to provide nearinstantaneous responses to external events.
All
software packages will conform to current IEEE Code
of Ethics and ACM standards.
except the ACT5108, which is instead located on a
separate board near the DC engine. The sensor
package is distributed throughout the UAV’s fuselage
to provide maximum coverage. The batteries are
regulated with a separate controller chip and a series of
DC-DC converters to maintain the voltage and provide
adequate Vcc for the various components.
Block Diagram:
Figure 16 shows the high-level block diagram
of the electrical systems. The central microcontroller
unit contains all the components listed in Table 11
LIDAR
Software
Antenna
Txmitter
DAC
Rxver
ADC
Mechanical
Transducers
Hi-Res
Camera
ADC
DSP
Video
MEM
Card
MCU
DAC
DSP
DAC
Left Wing
DAC
Txmitter
ADC
Rxver
Mechanical
Transducers
Right Wing
ADC
Sensor
Package
Antenna
Solar
Compass
ADC
DAC
Tail
DC Motor
Controller
Controller
Batteries
DC Electric Engine
Mechanical
Transducers
Propeller
Copyright 2004, CU Odysseus Team
Figure 16: Functional Block Diagram of Electrical System
23
that interprets data from accelerometers,
gyroscopes, and a photovoltaic compass.
Microcontrollers and the associated software will
process sensor data to check for deviations from
flight path and will implement the necessary
corrective flight adjustments. For communication
between the UAV and Mars-orbit satellites we
have, for redundantly, chosen three UHF patch
transceiver antennas that can continuously
transmit data produced by the UAV
instrumentation.
Finally, a power supply
consisting of multiple lithium-ion SPE batteries
will be responsible for powering the
instrumentation and propeller motor. Lightweight
batteries are chosen upon detailed consideration of
watt-hours per kg of all potential power sources
including solar cells.
Due to the constraints of time and
expertise, our UAV design has excluded discussion
of the induced roll due to a propeller.
Furthermore, we have not specified an exact
design for the contours of propeller itself. These
elements of aircraft design are extremely complex
and exceed the expertise of the team. Additionally,
power supply imposes limitations on flight
duration. In the future it is possible that potential
power supplies, which we have also explored, will
improve to a point where they are feasible for use
on an unmanned Martian aircraft, extending its
flight duration. Despite our omissions, we our
confident that the team’s UAV design is an
optimal solution with existing technologies and
will provide a reliable platform for Martian
exploration.
Conclusion
Throughout the design process, the
Odysseus Team has striven to maximize the
versatility of its UAV proposal.
The team
optimizes factors such as mass, power, speed, and
flight duration to devise an aircraft that will meet
the demands of a Martian scouting mission. The
product of such systematic and collaborative
design process is a 10.8 kg aircraft that can fly
unaided by a human controller for 2.3 hours at 130
m/s and a cruising altitude of 500 meters with a
maximum flight range exceeding 1000 km.
Equipped with topographical and imaging
instrumentation, such a UAV will be able to
produce the detailed information necessary for
future manned missions to Mars.
The UAV blueprint outlined in this paper
includes a 2.1-meter long fuselage, a 0.25-meter
maximum diameter for the fuselage, and a 2.078meter wingspan. The design of such components
takes into consideration low atmospheric density
which causes reduced lift and drag.
The
dimension of wingspan is the result of detailed lift
and airfoil analysis. To propel the UAV in an
atmosphere that lacks the necessary amount of
oxygen for combustion we have chosen a single
2.27-meter diameter propeller mounted aft of an
inverted V-tail. The decision to use an inverted Vtail is the result of a compromise between the
higher control stability but higher drag of a
conventional tail and the lower drag but lower
control stability of a V-tail. To control the UAV
flight path we have designed a feedback system
24
References
Aeroflex UTMC. (2002, December). UT28F256LV Radiation-Hardened 32Kx8 PROM.
Aeroflex UTMC. (2003, May). UT80CRH196KDS Microcontroller Datasheet.
Aeroflex UTMC. (2003, May). ACT5108 & ACT5109 3-Phase Brushless DC Motor Drivers.
Aircraft Design & Aeroflightdyanmics Group (ADAG). Aircraft Designed at DPA. Retrieved February 20, 2004
from http://www.dpa.unina.it/adag/eng/aircraft-design.htm
Anderson, J.D. (2000). Introduction to Flight (4th ed.). Boston, MA: McGraw-Hill Companies, Inc.
Archer, R.D. (1996). Introdution to Aerospace Propulsion. Upper Saddle River, NJ: Prentice-Hall, Inc.
Artemis Society International. (2001). Artemis Project: Hydrogen-Oxygen Fuel Cells for Lunar Habitat Energy Storage.
Retrieved from http://www.asi.org/adb/04/03/03/h2power.html
Ashby, M. & Cebon, D. (1996). Case Studies in Materials Selection. Retrieved October 2003 from
http://www.analog.com.
Beer F. & Johnston, R. (2001). Mechanics of Materials (3rd ed). New York, NY: McGraw-Hill.
Borst, H.V. (1973). Summary of Propeller Design Procedures and Data (Vol. 1). Springfield, VA: National Technical
Information Service.
Cesarone, R., Hastrup, R., Bell, D., Lyons, D., & Nelson, K.. Architectural Design for a Mars Communication & Navigation
Orbital Infrastructure, AAS 99-300.
Cognex. (2001). MVS-8100 Datasheet.
Cognex. (2002). CDC Series Digital Machine Vision Cameras.. http://www.cognex.com.
Darooka, D.K. & Jensen D.W. Advanced Space Structure Concepts and Their Development, AIAA-2001-1257
http://www.ilcdover.com/WebDocs/AdvStct.pdf
DSP Architectures. (2004, January). RHDSP24 Radiation Hardened Scalable DSP Chip.
EADS Space Transportation. (2003). EADS Space Propulsion. Retrieved October 27, 2003 from
http://cs.space.eads.net/sp/
Edie, D. & Buckley, J. (1993). Carbon-Carbon Materials and Composites. USA: William Andrew Publishing.
EG&G Services Parsons, Inc. (2000, October). Fuel Cell Handbook (5th ed). Retrieved from
http://www.fuelcells.org/fchandbook.pdf.
Endevco, Inc.. (2003). Silicon MEMS Pressure Sensor, Model 32394. http://www.endevco.com/
Ezell, E.C., & Ezell, L.N. (1984). On Mars: Exploration of the Red Planet, 1958-1978. Washington, DC: NASA
Hall, D., Tsai, K.C., Galbraith, D., & Parks, R.W. (1997). Conceptual Design of the Full-Scale Vehicle Propulsion
System Concept. Airplane for Mars Exploration. NASA/Ames Research Center, CA: David Hall Consulting.
Hepperle, M. (2004). Aerodynamics for Model Aircraft. Retrieved February 18, 2004 from http://www.mhaerotools.de/airfoils/index.htm
1
Hexweb. (2004). Hexweb: Honeycomb Attributes and Properties. Retrieved February 20, 2004 from
http://www.hexcelcomposites.com/Markets/Products/Honeycomb/Hexweb_attrib/hw_p11.htm
James, D. (2003). NASA Quest: Atmospheric Flight. Retrieved November 2003 from
http://quest.arc.nasa.gov/aero/planetary/atmospheric/structure.html
Kaplan, D.I. et al. (2000). In-Situ Propellant Production on Mars: The First Flight Demonstration. Retrieved from
http://powerweb.grc.nasa.gov/pvsee/publications/mars/MIP_LPSC.html
Kroo, I. & Shevell, R.S. (2003). Aircraft Design: Synthesis and Analysis. Stanford, CA: Desktop Aeronautics, Inc.
Retrieved February 21, 2004 from http://adg.stanford.edu/aa241/AircraftDesign.html
Lathrop, J., Snider, R., Becraft, W., Doll, D., & Cianciotto, F. UAV and LIDAR Mine Detection in the Surf Zone: Operational
Considerations. General Atomics Aeronautical Systems, Inc.
Mason, L. (2000). Prototype Solar Panel Development and Testing for a Mercury Orbiter Spacecraft. AIAA-2000-2881. Cleveland,
OH: NASA Glenn Research Center.
Morton, O. (1999, December). MarsAir: How to build the first extraterrestrial airplane. Air & Space Magazine, Vol. 14.
Retrieved October 28, 2003 from http://quest.nasa.gov/aero/planetary/MarsAir.html
Motorola, Inc.. (2004). http://www.motorola.com.
Mueller, T.J. (1985). Low Reynolds Number Vehicles. AGARDograph, No. 288.
Murray, J.E. & Tartabini, P.V. (2001). Development of a Mars Airplane Entry, Descent, and Flight Trajectory. Retrieved
October 2003 from AIAA.
Nice, K. (2003). How Fuel Cells Work. How Stuff Works. Retrieved October 20, 2003 from
http://science.howstuffworks.com/fuel-cell.htm
Nicolai, L.M. (1975). Fundamentals of Aircraft Design. Fairborn, OH: E.P. Domicone Printing Services.
Ralph, E.L. & Linder, E.B. (1996, May 13). Advanced Solar Panel Designs. IEEE Xplore Journal. 25th PVSC.
Washington D.C.
Raymer, D.P. (1999). Aircraft Design: A Conceptual Approach (3rd ed.). Reston, VA: AIAA Education Series.
SEAKR Engineering, Inc. (2002, October). NV-CPCI Non-Volatile Compact PCI Memory Card.
Shevell, R.S. (1989). Fundamentals of Flight (2nd ed.). Upper Saddle River, NJ: Prentice-Hall, Inc.
Stackhouse, D. (1999, January). Conventional vs V-Tails. Charles River Radio Controllers. Retrieved March 5, 2004 from
http://www.charlesriverrc.org/articles/design/donstackhouse_conventionalvsvtail.htm
Stanford Audio Phonic Photographic Infra Red Experiment. (1995, February 22). Space Environmental Study. Retrieved
from http://students.cec.wustl.edu/~sapphire/design/log/spacenv.html
Stevens, B.L., & Lewis F.L. (2003). Aircraft Control and Simulation (2nd ed.). Hoboken, NJ: John Wiley & Sons, Inc.
Teofilo, V. L., Brown, R., & Cuellar, E.A. (2001). Advanced Lithium Ion Solid Polymer Electrolyte Battery
Development.
United States Department of Energy. (2004, January 15). Energy Savers: Electric Vehicle Batteries. Retrieved from
http://www.eere.energy.gov/consumerinfo/factsheets/fa1.html.
2