Cierva Advice from RC Groups
advertisement

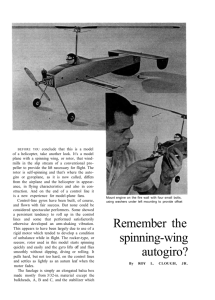
Cierva Advice from RC Groups General Build Advice / Info britnoz: BTW Did you use MG BB servos on the head, because you will need them. Plastic gears strip REAL QUICK when blades strike the ground, and believe me, they will strike the ground. Another thing you can do to stop gear damage is to only use the outer bolt on the blade mounting, and use a balsa stick in the inner hole. This will hold the blade in position and allow it to move on impact sheering the stick & saving the gear. I use this on several of my models. Now RE the Balsa pin in the (rotor blade) inner bolt hole, it is only required to hold the blade in position prior to rotation because when the blades get up to speed they will stay in there correct setting by the weight of the blades. I always use long sticks, so when they break ,it is just a matter of pushing the stick down and removing the broken piece. They are made to break with light contact of the blade. If you were to use a hard wood, then there is a chance that they would not break, causing damage to the blades & servo gears. deadduck: The horizontal stab has a notch at the leading edge, which is covered over. It indexes to the little block. Very tight fitting, I almost feel that it does not need glue. Will just put a little on edges once it's centered. britnoz: Another modification made was to use a lighter gauge wire push rod to the rudder. The wire supplied will put a big strain on the rudder servo. Remember to use MG BB servos on the head. Anyone using plastic gear servos will find that they will not take the load for long. When the rotor is spinning you will find that it takes a lot to move it. I also found it strange that the two main wheels were 35mm and the tail wheel was 40 mm. I changed the mains to 45 mm and the tail was fixed with a 15 mm [I did not fit the moveable bracket].try to get the tail as light as possible. hokonghing: can someone tell me what is this mystery part for? Thanks Talajouy: Two side stands connect to and that part connect to the central main stand/shaft, the fiberglass part also should fix to that piece as well. britnoz: I had a little bit of a heavy landing today and broke the 8 mm sq mast.I was very suprised to find that the hardwood mast was not very hard .I snapped the remaining piece in my hand with ease.The funny thing is that the 8 mm piece of sq wood running the length of the Fuz is a heavier grade than the mast.I think that possibly the wrong grade of timber has been used.I have now used a piece of carbon arrow shaft as the mast.It wont break again. deadduck: Weighed all the bits. This is what mine came to: Fuselage 162g Head / Mast 81g Landing Gear +m wheels 56g Horizontal/ rudder/ struts 48g Trim: Engine / Fairing 30g Blades 53g Engine mount/misc wood bits /Control parts/Hardware pack 46g Total 476g This is with items removed from plastic bags. Quoted Flying weight in specs at Hobbyking is 600g, wildly optimistic. I decided to use metal geared servos as advised. I found that the through bolt head and nut fouled on the servo case with the TP MG90s servos (edit note: possible substitution from Hobby King might be the Turnigy MG90) that I want to use causing them to skew over. I relocated the hole a little further away. Servo now sits flat on servo holder. I noticed that the holes burnt for the servo mounting screws were 2mm diameter so the normal servo mounting screws won't work. Used some of the supplied 2mm bolts. NOTE REGARDING Turnigy MG90S: On the Hobby King site someone indicates the electronics of this servo may be a bit suspect at 6v (like anything on the internet, may or may not be true), but that the gear set from this servo can be transplanted (along with the top section of the servo case) to the HXT 900 to make a metal-geared HXT 900. Lucam: In order to keep as light as possible the tail section, I replaced the original, heavy linkage with a much lighter Pull-Pull solution. For rudder, I used a digital HS 55 servo. Wire is a metal fishing wire covered with plastic; the great is that you can heat it with a lighter for secure your knot. I don't know which kind of wire it is, or which kind of fish is supposed to be used for, but I'm sure your local fishing shop can help you. The wire passes through a small (one inch) piece of plastic tubing glued to the fuselage sticks. Note the hole is closed with pieces of the covering removed from the horizontal stab before gluing. Use a pin to help locate the holes for the cabane struts. Detail pic of mast assembly, etc. NEAT PILOT! ROTOR HEAD ORIENTATION britnoz: Now this is important,if you watch the previous video on You Tube, you will notice that he mentions that the Rotor plate had been constructed reversed by Hobby King. SafeLandings: Just looked at your head on the photo you posted and yours is the wrong way around. The rotor mount plate is angled back, when the blades lift this will give you positive incidence which is wrong. They should be swept forwards so when they lift it creates negative incidence. Corrected rotor mount plate hokonghing: I got it, unscrew the 3-2mm blots on the blue holding plate and the center 4mm blot so that the whole blade mount plate can be flip up set down and re-mount the whole thing and you will end up with what show on post #72 from safelanding's photo, now you also need to remount all blots so that they are right side up. britnoz: The set up in the first picture will not generate any lift. The second is good. SafeLandings: When the blade is pushed upwards the trailing edge of the blade will lift up more than the leading edge. If you view this from the side as it lifts it gives more negative pitch to the blade aerofoil. If it does the opposite it will not work! Tinmar: The first head is for blades that turn clockwise. The second head is for blades that turn counter or anti clockwise. Boneswamped: if you are asking how to determine rotation direction, or which rotation direction this particular kit has; To determine the direction a blade is set up for, lay the blade sideways in front of you with the leading edge away from you, and the trailing edge closest to you. If the hole is on the left....it is for counter-clockwise rotation/If the hole is on the right....it is for clockwise rotation. Setup (Radio, Angles, etc) britnoz: This is going to be a little different to a Heli to fly. With most of my Autogyros the Motor has about 6 deg down thrust. The disc will have 4-6 deg back tilt with 2-3 deg left tilt. These are ball park angles and I would not suggest that you apply them as they MAY NOT BE SUITABLE FOR THIS MODEL. The other critical point is the [CG] Hang Angle. This is considerably greater than that of Fixed wing models. Today I have checked all my Autogyros for the various angles. On the Tractor models with the tailplane at 0 deg ,the rear tilt is between 4-6 DEG for level flight, and they all have 6 deg down thrust on the Motor. The Hang Angle is between 10-14 deg The Pusher models have a Hang Angle more like 18-22 deg. I actually have a scratch built model of a C-30 just about the same size as the HK model and that flies OK with 6 DEG down thrust on the Motor. As I said, I am flying a C-30 of the same size and it has 6 DEG down on the donk & 5-6 Deg back on the disc for level flight. You will find with an Autogyro that you never need to give down elevator,[just ease off the throttle a little] I think 8 deg back tilt is to much for a test flight. You may find that the model will clime to fast out of your hand on launch, if so you would have to reduce throttle quickly. They can loop on take off.[I have done it more than once, and if your not ready for it SPLAT'] Also, that hang Angle should be more like 10-16 deg. Autogyros run a lot more nose heavy than fixed wing models to save them should you have a dead stick. They will dead stick OK as long as you don't pull to much back stick.[just like Heli's, it's a matter of getting used to the feel of the model.] This may be of some help to those of you having problems with this kit. These are the settings that I have applied to my as of the moment un-flown model. The down thrust on the motor has to be adjusted to 6 deg .The down thrust on the front former is 1.5 down so packing must be applied to the motor mount. I have no side thrust on my set up. The back tilt on the rotor head should be approx 6 deg for level flight, this must be measured when the tailplane is at' 0' deg. I hope the pictures will help. You will find that most Autogyros fly with between 2-4 deg left tilt in level fright. The other feature that every one seems to want to know is, the CG. With Autogyros it is referred to as the' hang angle', and to find it ,you have to hang the model by the Rotor spindle and measure the angle on the tailplane .It should be between 10-16 deg .The high end is better. Unfortunately this model has been built VERY HEAVY and I found that I had to use a considerably large Lipo than required to get the weight correct. For this size motor a 1250 MA pack will normally give a 10 min flight, but I had to squeeze in a 2250 ma pack. The all up weight of the model with Lipo and Rotor came in at 775 gms which is about 250 gms overweight. I am sure you will be aware to use the 'Delta wing 'setting on your TX for the head movement. Don't forget to check the balance off the blades, mine were a bit out.[That is important] From the rear, right turn down on right SafeLandings: I use elevon mix which I think is the same. Plug in your servos, one to the aileron socket the other to the elevator socket. Set your delta/elevon mix on your transmitter. If your rotor disc moves to the right (looking from behind) when right aileron is applied on your stick then this is correct this is called 'roll'. The same on your elevator stick, apply up and your rotor should tilt backwards. If this doesn't happen first try swapping over your servo leads into the receiver. If its still wrong you will need to reverse on or both of these controls. You may have to revert back to swapping your servo leads into the receiver. Eventually you will get the right combination. UP- rearward tilt/pitch (elevator stick) DOWN- forward tilt/pitch (Do not go more than a few degrees past zero degrees) LEFT- Left tilt/roll (aileron stick) RIGHT- right tilt/roll Boneswamped: I personally would not mix the rudder and elevator. Throttle is your primary UP/Down, while elevator is going to control speed. While some back elevator may be required in turns, it varies with the angle of bank, winds, airspeed, etc. To set a mix that covers everything would be limiting I think. Some guys mix and love it, I don't care for it. I prefer to keep the control inputs limited to what I intended. Rudder will turn you just fine to begin with, apply opposite roll to keep he turns more level until you are comfortable with the flight envelope. Gyros can get exciting in steep turns. Have no fear of the maiden. Take your time, don't over control, keep it close. Most of my gyros will recover and land hands off by simply reducing the throttle and leaving everything else alone. You aren’t looking for everything to be neutral, you should have a bit of aft, and left tilt. Also make sure that full forward stick doesn't go more than a degree or two beyond level. The first flight is always a bit exciting because you will have your hands full flying and trimming. When Possible I always do small hops and adjustments. Since you are hand launching you don't have that option. I would get help for the launch, and make sure the launch helper understands how to release the model. With practice, when you get over the feeling that it won't fly when you let it go, you'll toss it into the air without regard. XavierM: (re: his LA Heli’s Cierva) Rotor : 6° back (neutral position) CG : when model is hung by the rotor mast with a string, nose must be heavy and go a little down, rotor gets horizontal. Throws : a lot !! the manufacturer says 8° movements for the rotor, it's not enough. 10/12° is the minimum in my opinion to have good response in any situation. With the manufacturer settings, model does not react fast enough to be saved near the ground. Delta mix on rotor servos and thread lock fluid to secure screws. Motor : 6° down, 5° right Take off : first launch rotor by hand, model is held 45% nose up facing the wind so the rotor can turn faster, just like a windmill (autorotation). Blades must "whistle", hand feels when the rotor can lift it, make a few quick steps then gently launch it with nose a little up into with 60 % throttle. Without wind, a little run is necessary to get turns. Ground take off : never tried but should be possible on a smooth surface. Throttle up to climb, down to descend, never cut off, the elevator stick must be pulled a lot in case of sharp turn or model looses altitude. Stable in flight but be careful about flight direction ! Even with good eyes sometimes it's difficult to estimate with rotor models, unlike airplanes. Colours may help... Landing : into wind with a little throttle and elevator stick back. Important : just like in many rc helicopters blades are attached with one bolt only (never with 2) so they can fold if the rotor hits the ground (and it does often because of my pilot skills). Rigid fixation will break the blade or the rotor mechanism in case of bad landing. Rotor is light but it has a lot of kinetic energy. Xavier M: (re his friend’s HK Cierva) Rotor : 90 ° with the mast (neutral position) CG : when model is hung by the rotor mast with a string, nose must be heavy and go a little down, rotor gets horizontal. Throws : at least 8° movements for the rotor, to have good response in any situation. Delta mix on rotor servos and thread lock fluid to secure screws. Launching / Flying Boneswamped: You have to run with the model. Well......, not actually run, you end up doing this weird looking kinda run. Gliding along awkwardly holding a model over your head, and a transmitter on your neck all the while trying not to bounce as you run. It's a real hoot to see others doing it! The ROG; is not difficult, but it is easy to make rookie mistakes. The uninitiated Gyro pilot has the tendency to rush the aircraft off the ground with throttle before the rotors are at full rpm. You can easily force it into the air on motor thrust, and drag from the rotor, but it isn't flying until full rpm is achieved (DO NOT DO THIS). The result is always the same an uncontrolled roll all the way to the ground. If you keep the models ground speed just slow enough that; if it were a fixed wing it wouldn't fly you're in the right range. At that speed where the rotors are in autorotation the aircraft will lift off nicely every time. Just don't be impatient, and test in an area with plenty of smooth flat surface. The Hand launch is pretty straightforward. Most guys get into trouble with this because they throw the model into the air. Hold the model nose high until the rotors begin to make the "Whooshing" noise indicative of Autorotation. Then lower the nose to almost level attitude with approx. 3/4 throttle or more and gently extend your arm (DON'T THROW IT) ensuring the model is level. It is an awkward feeling the first time, I understand your apprehension, but believe it or not, hand launching is much easier than ROG in my opinion, particularly with smaller gyros. britnoz: If there is no wind then you will have to flip the blades ,but with a little wind the blades should spin OK and you will feel the model pulling on your arm. Not a heavy steep launch, more like a gentle horizontal push, with about 2/3 power. I have not had to run, as autoratation of the blades can be reached at walking pace. Make sure the model is level i.e. not leaning left or right. Also when using the hand launch [which is recommended for this size model] make sure the rotor is up to speed before release, and only give enough power to let the model fly slowly out of the hand at just a little more than horizontal .It will not like a high powered 45 Deg launch PIC1 shows the model being held in to the wind to spin up the Rotor .The motor is not required yet. You should be able to feel the model pulling back on your arm at this point. [If you can’t the rotor is not up to speed]. PIC 2 Shows the motor being started and moving into the launch position [The rotor usually slows a little at this position.] It may not need full throttle, but enough to feel the model just trying to pull forward out of your hand. PIC 3 Shows the model at point of launch .not a steep angle, not a hard chuck, just a firm level push. If the model climbs steeply on take, reduce throttle before making trim changes. This model requires a lot of back stick when turning. If the model drops [It usually does a little] apply more power When flying an Autogyro the increase in power is used to climb as well as the elevator. All of my other Autogyros have a ''Light ..Floaty'' feel but this has a very heavy feel to it. The motor and prop are the same as I have used in my Minimun & Spyro models but before I fly this again I have to play with other combinations Rattle snake, the reason your model flipped to the left was you tried to take off before the Rotor was spinning fast enough. It's just like trying to fly a fixed wing model, without a wing. With the hand Launch method ,it allows the Rotor to come up to speed and the model has airspeed and height at the point of launch. This method should be tried a few times before releasing the model. Xavier M: Take off : first launch rotor by hand, model is held 45% nose up facing the wind so the rotor can turn faster, just like a windmill (autorotation). Blades must "whistle", hand feels when the rotor can lift it, make a few quick steps then gently launch it with nose a little up into with 50 % throttle. Without wind, a little run is necessary to get turns. Ground take off : never tried but should be possible on a smooth surface. Throttle up to climb, down to descend, never cut off, the elevator stick must be pulled a lot in case of sharp turn or model looses altitude. Landing : into wind with a little throttle and elevator stick back. Re: rudder…it's not really useful in flight since all the necessary controls are in the rotor. But it's very efficient! Yes, if you want to you can use the rudder to turn while flying, just like on an ordinary airplane model. Minirotor: Cross wind landings/taxing and showing off flying sideways[in a sbreeze] is about all the use of a rudder on a gyro. It will not turn much if you use the rudder with a single rotor machine. Zephyr41: It climbed away well from a hand launch at about 75% throttle and flew quite nicely in a very gentle right-hand turn. Left tilt was barely enough to get it to fly straight and a left turn was impossible. Fore-and-aft tilt didn't seem to do much at all, full 'up' slowed it down a bit though. Eventually I lost it in a steep right turn. The nose went down and up elevator wasn't enough. By the time my fixed-wing brain responded to the situation and I started rolling level and reducing power it was way too late! So... the rotor neutral position needs to be several degrees to the left, the fore/aft tilt needs to be increased (although it's already in danger of a tail strike on landing I fear) britnoz: You will find that most Autogyros fly with between 2-4 deg left tilt in level fright. I replaced the main shaft in my model with an 8mm carbon arrow shaft. The one in the kit is always going to break because it is not a very hard, hardwood. You will find that the rudder is very good in the turn .You can always mix it in. Equipment Suggestions The Rattle Snake: Im using this motor: TR 28-30B 14A 1050Kv Brushless Outrunner This Prop: 3 Blade EP Propeller 8x6 / 204x178mm I found that I could fit my 2200mah 3slipo in before I set everything up but once the motor was installed, the shaft protruding towards the back stopped it. 1800mah 3s lipo's will JUST fit, I recommend 1600mah 3s. Xavier M: Equipment and settings : 1200 KV brusless motor, APC 9,4,7 prop, HK 20 amps controller, 9 grams standard servos (2,69 $), Rhino 1550 3s battery. Very good flight characteristics, easy, original and pleasant to fly and listen (flopflopflop...) Lucam: The motor will be a Robbe 2830/12 spinning a 10x7 propeller; 900 KV with 2S (7.4V) 1550 Rhino cells and 25A Esc; theoretically, a 140 W setup. Zephyr41: My motor is a Turnigy TR 28-30B which is a bit more powerful and heavier than most are using and and I've used a prop driver with a large conical nut which adds a handy bit of weight right where it's needed. Replacement Rotor Hinge Suggestions Jeff Waters 24/10/2010 10:31:00 PM I had my Nylon blade support break before first flight. Was spinning up outsided and one blade hit tail. I have a repair solution that worked. Go to your local Office supply store with your old hinge and get a flexible plastic binder. The cover should be half the thick ness. Use the old hinge as a templated and cut 2 peices out. Use contact cement and put them together then use the old hings as a drill template. Worked for me. Crashed on my first flight but the hinge stayed intact when the main rotor hit the ground spinning. DON'T USE (CD/DVD): It snaps across the drill holes.