Chapter 3-2 Student
advertisement

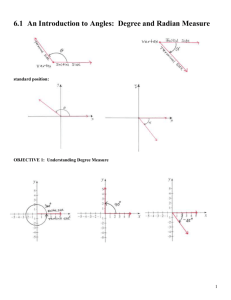
CHAPTER 3 LESSON 2 Date _____________________ Angles in Standard Position AW 3.3 MP 4.1 Objective: To define standard position and to investigate the properties of angles in standard position. 1) Angles as Rotations Any angle may be viewed as the rotation of a ray about its endpoint. Consider a ray OB that is then rotated about its endpoint O to form AOP with vertex O. By agreement, we say that such a counter clockwise rotation produces a ____________ angle. In this case, AOP 40. Side OP is called the _________ side or arm of AOP. Side OP is called the ________ side (or arm) of AOP. Rotating the ray OA in a clockwise direction produces a _________ angle. In this case, AOP1 40. As before, side OA is called the ________________________ side (or arm) of AOP1. Side OP1 is called the ____________________________ side (or arm) of AOP1. 2) Definition of Standard Position To study angles with respect to the Cartesian coordinate system, we must first agree on a set way to place an angle in the coordinate plane. We say that an angle is in standard position in the coordinate plane if the following two requirements are satisfied. a) _________________________________________________________ b) _________________________________________________________ Let’s place the angle below in standard position. Example 1: Draw a positive angle in standard position whose terminal arm is in quadrant 4. Example 2: Draw a negative angle in standard position whose terminal side is in quadrant 2. Example 3: 3 5 Using the points provided on the grid below as a guide, sketch the angles 4 and 4 in standard position. 3) Coterminal Angles Definition: Coterminal angles are standard position angles that share a common ________________ ________________. The two angles that you drew in example 3 are coterminal angles. Every angle in standard position has an infinite number of coterminal angles associated 3 with it. For example, reconsider the standard position angle 4 (135) from example 3. Let P(x,y) be a point on the terminal side of . Let’s move the terminal arm of counter clockwise one complete rotation about the 3 origin. Thus the new coterminal angle of 4 will be (In degrees, this new coterminal angle will be ________________________ .) . 3 Let’s move P another full rotation. The new coterminal angle of 4 will thus be . In both cases, P will still have the same coordinates (x, y). 3 In the same manner, the terminal arm of 4 can rotate clockwise about the origin. 3 Let’s move the terminal arm of 4 clockwise one complete rotation about the origin. Thus the new coterminal angle will be . (In degrees, this new coterminal angle will be ____________________________) 3 We could also rotate the terminal arm of 4 clockwise one more complete rotation about the origin. Thus, another coterminal angle of is In both cases, the point P will still have the same coordinates (x, y). . Of course, we are not limited to the number of times we can rotate the terminal arm of , either clockwise or counter clockwise. Such rotations produce an infinite family of 3 coterminal angles of 4 . Rotating counter clockwise, we generate the following coterminal angles. 3 Therefore, k complete counter clockwise rotations of the terminal arm of 4 would produce a coterminal angle of . Likewise, rotating clockwise, we generate the following negative coterminal angles. 3 Thus, k complete clockwise rotations of the terminal arm of 4 would produce a negative coterminal angle of Generalization: In general, consider an angle in standard position. Coterminal angles of will have the form where n is any integer. (If is in degrees, coterminal angles of will have the form ____________________ where n is any integer.) 2(1) 2 (1) 2 (1) 2 (2) 2 (2) etc. 2(2) etc. 4) Reference Angles Definition: Consider an angle in standard position. The reference angle of is ___________________________________________________________________ Exercise 1: Sketch the reference angle of each angle . 1) 2) 3) 4) Exercise 2: Consider each of the following angles. (a) 45 (b) 5 6 (e) 240 (f) = 2 3 (c) 225 (d) 5 3 (g) 360 (h) 7 4 (i) For each angle, draw the standard position angle. (a) (b) (c) (d) (e) (f) (g) (h) (ii) State which quadrant each angle is in. (a) Quadrant: ______ (b) Quadrant: ______ (c) Quadrant: ______ (d) Quadrant: ______ (e) Quadrant: ______ (f) Quadrant: ______ (g) Quadrant: ______ (h) Quadrant: ______ (iii) For each angle, find two coterminal angles. (a) (b) (c) (d) (e) (f) (g) (h) (iv) Find the reference angle of each angle. (a) ______ (b) ______ (c) ______ (d) ______ (e) ______ (f) ______ (g) ______ (h) ______