Chapter 3
advertisement

Chapter 6
Digital Modulation Techniques
In the previous chapter, we introduced methods that modulate a continuous function
(message signal) onto a carrier by varying the carrier's amplitude or phase. This
chapter introduces the concepts of digital modulation techniques. The main difference
between the analog modulation and digital modulation is that the transmitted message
for a digital modulation system represents a small set of abstract symbols, e.g., 0 and
1 for a binary transmission system, while, for an analog modulation system, it
represents a continuous waveform. To transmit a digital message, a digital modulation
allocates a piece of time called signal interval and generates a continuous function
that represents the symbol.
For digital modulation techniques, the message signal is often transformed onto a
baseband signal. In a wireless communication system, a second part of the
modulator converts the baseband signal to a radio-frequency (RF) signal, modulating
the phase, frequency, or amplitude of the carrier. In a wired system, the baseband
signal may be sent directly without carrier modulation. However, sometimes,
multiple message signals are required to transmit simultaneously through the same
wire. Under this circumstance, some modulation techniques may be employed so that
different messages can be modulated into different frequency bands. This technique
is called frequency-division multiple access (FDMA). Beside the FDMA technique,
there are more multiple access techniques that may be employed for digital
communication systems, e.g., the time-division multiple access (TDMA) and the
code-division multiple access (CDMA). Those techniques will be introduced in the
next chapter.
The receiver end of a digital modulation system consists of a circuit to convert
the modulated signal to a baseband signal and circuits to decide which symbol is
transmitted during each signal interval by the transmitter. A digital demodulator
differs from an analog one in that it outputs a decided symbol, whereas an analog
demodulator produces an output that approximately equals to the message signal.
These facts are important in deciding whether to use a digital modulation scheme.
One may easily confuse digital conversions with digital modulations.
6-1
The
former which we have discussed in Chapter 2 changes the form of information from
analog to digital. The digital conversion is required when we want to transmit
analog signal via a digital communication system and is unnecessary if the
information is already in digital form.
The major purpose of this chapter is focused on the methods of various digital
modulation and demodulation schemes, not on the analysis of the performance of
those systems which in general requires more mathematical background, e.g., the
probability theory and stochastic process. The performance of those systems will be
explained intuitively if possible.
6.1
Baseband Pulse Transmission
In this section, we will introduce a transmission technique which does not require
carrier modulation, called baseband pulse transmission. The digital information for
the baseband pulse transmission is transformed to a pulse train. We will restrict the
discussion to the binary transmission case. Each pulse has duration Tb and represents a
specific digital information. In this form of signaling, symbols 1 and 0 are
represented by positive and negative rectangular pulses of equal amplitude and equal
duration. For example, if the pulse considered is a rectangular pulse, the binary
information stream of “1001101” is transformed onto a baseband signal as shown in
Fig. 6.1-1(a), where Tb is assumed to be 1 sec.
6-2
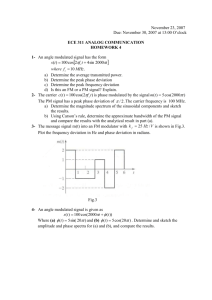
Fig. 6.1-1: Signals for Baseband Pulse Transmission. (a) Baseband Pulse Signal.
(b)The Received Signal Corrupted by Noise and the Sampled Points. (c) The Output
of the Correlator and the Corresponding Sampling Points.
In mathematical notation, letting m be the transmitted symbol, i.e., m 0,1 , we
have the transmitted signal denoted as
A if m 1
st
A if m 0
(6.1-1)
for 0 t Tb. In this case, 1/Tb is called the bit rate. Note that, for mathematical
representation, it is sufficient to consider the transmission over 0 t Tb, since similar
cases happen if a different signaling interval is considered.
It is assumed that the receiver has acquired knowledge of the starting and ending
times of each transmitted pulse; in other words, the receiver has prior knowledge of
the pulse shape, but not its polarity. Given the received signal, the receiver is required
to make a decision in each signaling interval as to whether the transmitted symbol is a
1 or a 0.
In the receiving end, the simplest way for recovering the original digital stream is
to sample the received signal at the sampling rate 1/Tb. Then a decision device is
used to “guess” the transmitted symbol based on the sampled value at each instance.
The sampling instance is in general chosen to be in the middle of the signaling
6-3
interval.
If the sampled value is positive, then it decides that a 1 was transmitted.
If the sampled value is negative, then it decides that a 0 was transmitted. This
scheme was used as standards in short distance wired transmission, e.g., the RS232
standard. However, for long distance transmissions, noise signals will appear that
add to the transmitted signal. In addition, the desired transmitted signal will be
seriously attenuated for long distance transmissions. As a result, the received signal
will not be so “clean” as comapred with the original transmitted signal. For example,
Fig. 6.1-1(b) gives a noise version of the received signal and the corresponding
sampled points that are denoted by circles. In this case, if a sampled value is directly
used to decide which symbol was transmitted by the transmitter, it is very possible
that the sampled value goes to the opposite polarity at the sampling instance. The
decision device will make a wrong decision based on this sampled value. For
example, as shown in Fig. 6.1-1(b), the decisions made based on the sampled values
produce the output “1101001” which contains two errors as comapred with the
transmitted sequence “1001101”.
distance transmission systems.
Therefore, this scheme is not suitable for long
In the following, we will explain the meaning of Fig. 6.1-1 (c). If only one
sampled value is used by the decision device, the whole waveform over (0, Tb) is
observed at only one instance. This scheme is obviously not optimal, since we do
not take advantage of everything known about the signal. Since the starting and
ending times of the pulse are known, a better procedure is to compare the area of the
received signal-plus-noise waveform by integrating the received signal over the
Tb-second signaling interval.
A receiver for baseband pulse transmission is given in Fig. 6.1-2, where an
integrator is employed. The integrator will integrate the waveform over (0, Tb) with
the output being sampled at time Tb. Of cause, a noise component is present at the
output of the integrator, but, since the additive noise is always assumed to be of zero
mean, it takes on positive and negative values with equal probability. Thus the
output noise component has zero mean. Intuitively, the integrator can be thought as an
energy collector that collects the energy of the received signal over (0, Tb), producing
an energy value with sign at the sampling instance. In addition, the noise will be
“averaged” over (0, Tb) by the integrator, and hence the noise component will be
suppressed by the integrator. Formally, the integrate-and-dump device is called
a ”correlator”. The decision device then, based on the sampled values, makes a
decision on the transmitted symbol. If the output of the correlator at the sampling
instance is positive, it decides that a 1 was transmitted. If the output is negative, then
6-4
it decides that a 0 was transmitted.
Fig. 6.1-1 (c) gives the output waveform of the
integrator, where the sampling points are denoted by circles. The decisions based on
these sampled values are “1001101” which contains no error as comapred with the
transmitted sequence.
Fig. 6.1-2: A Receiver for Baseband Pulse Transmission.
6.2. Amplitude-Shift Keying (ASK)
From now on, we will add carrier waves into the modulation scheme. The simplest
modulation technique is the amplitude-shift keying (ASK), where the digital
information is modulated over the carrier's amplitude, similar to the amplitude
modulation for analog modulation.
In general, we require two waveforms s1 (t ) and s2 (t ) for binary transmission.
If the transmitter wants to transmit a “1”, s1 (t ) is employed over the signaling interval
(0, Tb). On the other hand, if the transmitted symbol is “0”, s2 (t) is used over (0, Tb).
Assume that the probabilities of transmitting a “1" and a “0" are equal. For ASK, the
transmitted waveforms can be expressed as
s1 t
s 2 t 0
4 Eb
cos( 2 f c t )
Tb
(6.2-1)
for 0 t Tb , where Eb is the averaged transmitted signal energy per bit and f c is
the carrier frequency which is equal to
nc
Tb
for some fixed integer nc .
averaged transmitted signal energy can be verified by the following equation
6-5
The
0.5 s12 t dt 0.5 s22 t dt
Tb
Tb
0
0
(6.2-2)
which is equal to Eb as defined. The transmitted signal s(t) can be expressed as
s t for symbol "1"
st 1
s 2 t for symbol "0"
(6.2-3)
for 0 t Tb. We note that the transmitter for such a system simply consists of an
oscillator that is gated on and off, and accordingly ASK is often referred to as on-off
keying. Fig. 6.2-1(a) gives a transmitted waveform resulting from the digital
transmission of “1001101”, where Eb 1 , f c 5 Hz, and Tb 1 sec.
Fig. 6.2-1: Signals for ASK.
(a) Transmitted Signal.
(b) The Signal yt st
2 Tb cos2f c t . (c) The Output of the Integrator and the Corresponding Sampling
Points.
6-6
A receiver for ASK is given in Fig. 6.2-2. In the following, we will explain how
the demodulation works. The received signal is first multiplied by a unit-energy
signal 2 / Tb cos2f ct .
Note that we use unit-energy signal for convenience of
Arbitrary signals with the form B cos2f ct can be
mathematical representation.
used instead, where B is a positive constant. Assuming that the received signal is
noise free, we have the following expression after multiplication
yt st
2
cos2f ct .
Tb
(6.2-4)
Fig. 6.2-2: A Receiver for Amplitude-Shift Keying
Fig.
s(t )
6.2-1(b)
shows
the
corresponding
8Eb
4 Eb
cos( 2f c t ), y (t )
cos 2 (2f c t ).
Tb
Tb
corresponding period.
Tb
0
nc
Tb
Thus,
y(t).
y (t ) 0
If
for
the
This is quite significant as we shall see later.
x
Replacing f c
signal
4 Eb
2
cos2f c t
cos2f c t dt
Tb
Tb
8 Eb
Tb
Tb
0
1 cos4f c t
dt.
2
in the above equation, we have
6-7
(6.2-5)
x
Tb 1
8 Eb Tb 1
nc
4 t dt
dt
cos
0 2
Tb 0 2
Tb
8 Eb 1 Tb 1
n Tb
1
t
sin 4 c t
Tb 2 0 2 4 nc Tb Tb 0
(6.2-6)
2 Eb .
The last equality follows since the second term in the brackets is zero. If s2 (t ) was
transmitted, the sampled signal is x = 0 since s2 (t ) 0 . In summary, we have
2 Eb
x
0
if 1 is transmitte d
(6.2-7)
if 0 is transmitte d.
Fig. 6.2-1(c) gives the resulting signal from the integrator and the corresponding
sampled points. The decision device based on the sampled values makes a decision
of “1001101” which is exactly the same as the transmitted sequence.
Although there are only two possible outcomes for the noiseless case, the actual
received signal may be corrupted by noise. For certain systems, we have infinitely
many outcomes for the output of the correlator. Therefore, a threshold value is
required in the decision device to distinguish which symbol was transmitted.
This
value is set to the center of 0 and 2Eb , i.e., Eb 2 , so that minimum bit error
probability can be achieved. If x , the decision device makes a decision of 1. If
x , the decision device makes a decision of 0.
The detection method described previously requires a carrier with the same
frequency and phase as those of the carrier in the transmitter. Those kinds of
receivers are called coherent detector. It is also possible to detect an ASK signal
without the knowledge of the carrier frequency and phase. Those kinds of detectors
are call noncoherent detector. For binary ASK, a noncoherent detector is illustrated
in Fig. 6.2-3 which consists of a band-pass filter and an envelope detector followed by
a correlator and a decision device. The band-pass filter is used to remove the
out-of-band noise. The envelope detector is then used to recover the envelope of the
carrier wave. The resulting signal is a baseband pulse signal which can then be
detected by the baseband pulse detector, a correlator followed by a decision device as
described in the previous section. However, this receiver is not optimal since an
6-8
envelope detector will enhance the noise at the input of the correlator and hence
increase the bit error probability. In general, the transmitted energy for the
noncoherent detector must be doubled to achieve the same bit error probability as that
of the coherent detector.
Fig. 6.2-3: Noncoherent Detector for Amplitude-Shift Keying
In the following, the geometric interpretation is used to represent a signal set,
e.g., s1 t , s2 t for the binary case, as points in the signal space. The collection of
all possible signal points is called the signal constellation.
binary ASK, let
1 t
2
cos2f ct
Tb
For example, for the
(6.2-8)
which is a unit energy signal over (0, Tb). Then, all the possible signal si(t) for i = 1,
2 can be represented as
si t si11 t .
(6.2-9)
It is easy to show that s11 2Eb and s21 0 .
The geometric interpretation of
these two signal points can be denoted as points in a real line as illustrated in Fig.
6.2-4. The decision boundary is determined by the threshold value . If the
received signal x lies in the right side of the decision boundary, i.e., the region Z1,
then a decision of a “1” is made. If the received signal x lies in the left side of the
decision boundary, i.e., the region Z2, then a decision of a “0” is made.
6-9
Fig. 6.2-4: Geometric Representation of Binary ASK Signals.
One advantage in using the signal space representation is that it is much easier to
identify the “distance” between signal points. The distance between signal points is
closely related to the symbol error rate of a given constellation. In this ASK case,
the distance between two signal points is
2Eb .
Intuitively, to reduce the
probability of detection error due to noise, we may increase the transmitted energy of
the signals, i.e., increase Eb. As a result, the distance between two signal points will
be increased which makes the received signal point less probable be located in the
wrong region.
Sometimes, multi-dimensional geometric interpretation is required to represent
the whole signal set over the signaling interval (0, T). For the N-dimensional case, a
set of orthonormal functions 1 t ,2 t ,...,N t is required to present all the
possible transmitted signals s1 t , s2 t ,..., sM t . Note that M = 2 for binary case.
The set of functions 1 t ,2 t ,...,N t is called an orthonormal basis so that every
transmitted signal can be presented as a linear combination of the basis functions.
That is
N
si t sij j t
for i=1,…, M and 0 t T
(6.2-10)
j 1
and
1
t t dt 0
T
0
i
j
i j
.
i j
(6.2-11)
We may plot the signal vector si si1 , si 2 ,, sin as a point in the N-dimensional
signal space to represent the time-domain signal si (t ) . These concepts will become
clear as we introduce the multi-dimensional modulations, e.g., the frequency-shift
keying (FSK) and the quadriphase-shift keying (QPSK).
6-10
6.3 Binary Phase-Shift Keying (BPSK)
In a BPSK system, the pair of signals s1 (t ) and s2 (t ) used to represent binary
symbols 1 and 0, respectively, are defined by
s1 t
2 Eb
cos2f c t
Tb
(6.3 1)
s 2 t
2 Eb
2 Eb
cos2f c t
cos2f c t
Tb
Tb
(6.3 2)
where 0 < t < Tb, Eb is the transmitted energy per bit, and fc is the carrier frequency
which is chosen equal to nc Tb for some fixed integer nc. A pair of sinusoidal
waves that differ on in a relative phase shift of 180 degrees are referred to as antipodal
signals. Fig. 6.3-1(a) illustrates a transmitted signal when the binary stream is
“1001101” where Eb = 1, fc = 5 Hz, and Tb = 1 sec.
6-11
Fig. 6.3-1: Signals of BPSK.
r t 1 2 cos2f c t .
(a) Transmitted Signal.
(b) The Signal
(c) The Output of the Correlator and the Corresponding
Sampling Points.
An optimal detector for BPSK system is shown in Fig. 6.3-2.
The received
signal is first multiplied by the unit energy signal 1 t 2 Tb cos2f ct .
Assuming that the received signal is noise-free, we have the following expression
after multiplication
yt st
y (t )
2 Eb
Tb
2
cos2f ct .
Tb
cos 2 (2f c t ) if 1 is transmitted and y(t )
transmitted.
6-12
2 Eb
Tb
cos 2 (2f c t ) if 0 is
Fig. 6.3-2. A Coherent Detector for BPSK.
An example of the signal y(t) is plotted in Fig. 6.3-1 (b).
The two possible
outcomes from the output of the correlator for noiseless case can be shown to be
Eb if 1 was transmitte d
x
.
Eb if 0 was transmitte d.
(6.3-3)
The threshold value in this case must be set to 0 which corresponds to the center
between Eb
and
Eb .
The output signal of the integrator and the
corresponding sampling points are plotted in Fig. 6.3-1 (c).
If the sampled value is
greater then zero, then a decision of 1 is made. If the sampled value is less than zero,
then a decision of 0 is made. The decision device based on the sampled values
makes a decision of “1001101” which is exactly the same as the transmitted sequence.
For geometric representation, the transmitted signals s1(t) and s2(t) can be
expressed in terms of 1 t as follows:
s1 t Eb 1 t ,
s 2 t Eb 1 t ,
0 t T0
0 t T0.
(6.3-4)
A coherent BPSK system is therefore characterized by having a signal space that is
one-dimensional, with a signal constellation consisting of two message points as
shown in Fig. 6.3-3.
6-13
Fig. 6.3-3: Signal-Space Diagram for Coherent BPSK.
The decision boundary shown in Fig. 6.3-3 is determined by the threshold value
which in this case is equal to 0. If the received signal x lies in the right side of
the decision boundary, i.e., the region Z1, then a decision of 1 is made. On the other
hand, if the received signal lies in the left side of the decision boundary, i.e., the
region Z2, then a decision of 0 is made.
6.4 Binary Frequency-Shift Keying (FSK)
In a binary FSK system, symbols 1 and 0 are distinguished from each other by
transmitting one of two sinusoidal waves that differ in frequency by a fixed amount.
A typical pair of sinusoidal waves is
s1 t
2 Eb
cos2f1t
Tb
s2 t
2 Eb
cos2f 2t
Tb
(6.4-1)
for 0 t Tb , where Eb is the transmitted signal energy per bit. The transmitted
frequency is
fi
nc i
for some fixed integer nc and i=1,2.
Tb
6-14
(6.4-2)
Note that f 2 f1 1 Tb .
by s2(t).
Thus symbol 1 is represented by s1(t) and symbol 0
It is easy to show that s1(t) and s2(t) are orthogonal. Therefore define
i t
2
cos2fit
Tb
for i=1,2 and 0 t Tb .
(6.4-3)
In fact, we can show that 1 t and 2 t are orthonormal basis functions.
First, we want to show that 1 t and 2 t have unit energy. The energy of the
signal i t over (0, Tb) is given by
Tb
0
i2 t dt
2
Tb
Tb
0
cos 2 2f i t dt
Tb 1
2 Tb 1
0 dt 0 cos4f i t dt
Tb 2
2
2
Tb
t
2
Tb
0
(6.4-4)
Tb
1
sin 4f i t .
8f i
0
Letting f i nc i Tb in the above equation, we have
Tb
0
Tb
nc i
1
0
sin 4
T
0
b
2
8
n
i
T
T
c
b
b
2 T
1
b
sin 4nc i
Tb 2 8 nc i Tb
i2 t dt
2
Tb
(6.4-5)
1.
The last equality follows since nc +i is a positive integer and hence the second in
the brackets is zero. In addition,
Tb
0
1 t 2 t dt
2
Tb
1
Tb
Tb
Tb
0
0
cos2f1t cos2f 2 t dt
cos2 f 1 f 2 t cos2 f1 f 2 t dt.
Letting f i nc i Tb in the above equation, we have
6-15
(6.4-6)
Tb
0
1 t 2 t dt
1
Tb
Tb
Tb
2nc 3t
1
cos 2
dt cos 2
0
0
Tb
Tb
t dt .
(6.4-7)
Since 2nc+1 is a positive integer, the first integration integrates the cosine term
over exactly 2nc + 1 periods. Therefore the first term is zero. Similarly, the second
term is integrated over one period of a cosine signal and hence the result is also zero.
As a result we have
Tb
0
1 t 2 t dt 0.
(6.4-8)
Therefore, 1 t and 2 t form an orthonormal basis.
There is a simpler way to prove that 1 t and 2 t are orthonormal. Note
that f1 and f 2 are two unequal integers. Therefore, according to the discussion in
Chapter 3, we can easily conclude that 1 t and 2 t are orthonormal
To generate a binary FSK signal, we may use the scheme shown in Fig. 6.4-1.
The binary data sequence is first applied to an on-off level encoder. At the output of
the encoder, symbol 1 is represented by a constant amplitude of
Eb and symbol 0
is represented by zero.
If the input of the
An inverter is used in the lower channel.
inverter is 0, the output is
output will be 0.
carrier on and off.
Eb . On the other hand, if the input is
Eb , the
The multipliers act as switches which turn the corresponding
If the input of the multiplier is
Eb (0), the corresponding
carrier will be turned on (off). Now, if the transmitted symbol is 1, the carrier of the
upper channel will be turned on, and that of the lower channel will be turned off.
Similarly, if the transmitted symbol is 0, the carrier of the upper channel will be
turned off, and that of the lower channel will be turned on. Therefore, the resulting
output signal is altered between two carriers of different frequencies controlled by the
input symbol. Fig. 6.4-2 (a) gives an example of resulting waveform when the input
binary stream is “1001101”, where Eb 1 , Tb 1 sec, f1 3 Hz, and f 2 4 Hz.
6-16
Fig. 6.4-1: Modulator for an FSK System.
Fig. 6.4-2: Signals for an FSK System.
Multiplication Output
(a) The Transmitted Signal.
z1 t st 2 Tb cos2f1t .
Output z 2 t st 2 Tb cos2f 2 t .
(b) The
(c) The Multiplication
(d) The Difference between Two Outputs of
the Integrators and the Corresponding Sampling Points.
6-17
The demodulation of the received signals utilizes the fact that the two signals
1 t and 2 t are orthonormal. That is, if we want to detect 1 t , we multiply
the received signal by 1 t and integrate. Because 1 t and 2 t are
orthonormal, the 2 t part will disappear totally and only the coefficient of 1 t
remains. We may also multiply the received signal by 2 t and integrate. This
time, only the coefficient related to 2 t remains. Since only one of the
coefficients is 1, we can easily see whether 1 or 0 is transmitted.
The above discussion leads to the receiver shown in Fig. 6.4-3. It consists of
two correlators with a common input, which are supplied with two locally generated
coherent signals 1 t and 2 t . The correlator outputs are then subtracted, one
from the other, and the resulting difference, y, is compared with a threshold of zero.
If y > 0, the receiver decides in favor of 1. On the other hand, if y < 0, it decides in
favor of 0.
Fig. 6.4-3: Coherent Detector for an FSK System.
For noiseless case, the received signal is exactly the transmitted signal. If the
signal s1(t) (representing 1) was transmitted, the outputs x1 and x2 of the correlators
can be expressed as
x1
T
0
x2
T
0
2 Eb
2
cos2f1t
cos2f1t dt Eb
Tb
Tb
(6.4-9)
2 Eb
2
cos2f1t
cos2f 2 t dt 0.
Tb
Tb
On the other hand, if the signal s2(t) (representing 0) was transmitted, the outputs of
the correlators can be expressed as
6-18
x1
T
0
x2
T
0
2 Eb
2
cos2f 2 t
cos2f1t dt 0
Tb
Tb
(6.4-10)
2 Eb
2
cos2f 2 t
cos2f 2 t dt Eb .
Tb
Tb
Therefore, y x1 x2 is greater than zero if s1(t) was transmitted and is less than
zero if s2(t) was transmitted.
Fig. 6.4-2 illustrates signals at the receiver. The transmitted signal is given in
Fig. 6.4-2(a), where f1 = 3 Hz and f2 = 4 Hz. The received signal is first multiplied
by two carriers with frequencies 3 and 4 Hz, respectively.
The results are denoted
by z1 t st 2 Tb cos2f1t and z2 t st 2 Tb cos2f 2t and are
shown in Fig. 6.4-2(b) and (c), respectively. Finally, the resulting difference
y x1 x2 is given in Fig. 6.4-2(d). The decision device based on the sampled
values makes a decision of “1001101” which is exactly the same as the transmitted
sequence.
Perhaps it is appropriate to think along the following line. This FSK system is
based upon the basic concept that we are transmitting two signals which are
orthonormal to each other and form a basis. Let us imagine a simpler case where we
are transmitting two signals; (1,0) and (0,1). First of all, we note that these two
vectors form a basis. That is, the inner product of (1,0) and (0,1) is 0 and
(1,0) (0,1) At the receiving end, how do we determine whether (1,0) or (0,1) is
transmitted? What we can do is to perform an inner product of the received signal
and (1,0). If the transmitted signal is (1,0), the resulting inner product is 1. If the
transmitted signal is (0,1), the resulting inner product is 0. Thus, we have a way to
detect the signals. In the FSK case, the basic idea is quite similar. We are sending
two orthonormal signals. The demodulation is essentially a performance of the inner
product. This concept will be used in many places, as we shall see.
We have shown that there are two orthonormal basis functions 1 t and 2 t
defined in Equation (6.3).
The signal points s1(t) and s2(t) can be expressed as
si t si11 t si 22 t
for i=1,2 and 0 t T .
6-19
(6.4-11)
Therefore a coherent binary FSK system is characterized by having a signal space
which is two-dimensional with two message points, as shown in Fig. 6.4-4.
message points are defined by s1 ( Eb ,0 ) and s2 (0, Eb ) .
The two
As shown in
Fig. 6.4-4, the decision boundary is characterized by the line with x1 x2 0 .
Therefore, if x1 x2 0 , the received signal point lies in region Z1 and the decision
device makes a decision of 1. On the other hand, if x1 x2 0 , the received signal
point lies in region Z2 and the decision device makes a decision of 0.
Fig. 6.4-4: Signal space diagram for binary FSK.
The distances between two signal points for the binary ASK, BPSK, and FSK
systems are 2 Eb , 2 Eb and
2 Eb , respectively, as shown in Figures 6.2-4,
6.3-3, and 6.4-4. Therefore, under the same transmitted bit energy and the same
level of noise corruption, the BPSK system gives the lowest bit error rate since BPSK
system has the largest distance between two signal points. The performances of
ASK and FSK are exactly the same since they have the same distance between two
signal points.
6-20
6.5
Quadriphase-Shift Keying (QPSK)
One important goal in the design of a digital communication system is to provide a
reliable communication, i.e., achieve a very low probability of error. Another
important goal is the efficient utilization of channel bandwidth. In this section, we
study a bandwidth-conservation modulation scheme known as coherent
quadriphase-shift keying. Unlike binary ASK, BPSK, and FSK systems, in the
QPSK scheme, two bits are transmitted simultaneously during one signaling
interval T. Therefore, without increasing the transmitted bandwidth, we can double
the transmitted bit rate.
The QPSK system is best illustrated in Fig. 6.5-1. Let us assume that there are
two bits which are going to be transmitted during one signaling interval T. They are
denoted as m1 and m2 . As shown in Fig. 6.5-1, m1 will go up and m2 will go
down. Then the following rules will follow:
1. m1 will trigger signal s i1 and m2 will trigger signal s i 2 .
2. If m1 is equal to 1(0), s i1 is set to be E 2 E 2 .
3. If m2 is equal to 1(0), s i 2 is set to be E 2 E 2 .
4. si1 ( si 2 ) will be multiplied by
2 T cos2fct 2 T sin 2fct .
5. The signal transmitted is
si t si1
2
2
cos2f ct si 2
sin 2f ct .
T
T
6-21
(6.5-1)
Fig. 6.5-1: A schematic Diagram of QPSK.
Before introducing the demodulation process of QPSK, we shall first introduce
an interesting property of the system. Let us take a look at si (t ) in Equation
(6.5-1). We can easily show that
si (t )
2
r cos( 2f c t )
T
where r si1 si 2
2
2
and tan 1
(6.5-2)
si 2
.
si1
E
, r E . As for , note that it is related to the values
2
and s i 2 . Since each of them assumes two values, there are four possible
Since si1 si 2
of s i1
combinations. Therefore there are four possible values of , corresponding to four
distinct combinations of s i1 and s i 2 . Every assumes an integer multiplication
of
.
4
Interestingly, from Equation (6.5-2), we can express si (t ) as follows:
si t
2E
cos 2f ct 2i 1
T
4
6-22
for 0 t T .
(6.5-3)
Consider the case where m1 1 and m2 0 .
si 2
In this case, si1
E
and
2
E
. Thus, we have
2
si (t )
E
(cos( 2f c t ) sin( 2f c t ))
T
E
2
2
( 2(
cos( 2f c t )
sin( 2f c t ))
T
2
2
2E
(cos( ) cos( 2f c t ) sin( ) sin( 2f c t ))
T
4
4
2E
cos( 2f c t ).
T
4
(6.5-4)
Let us expand the above equation as follows:
si t
2E
cos 2i 1 cos2f ct
T
4
2E
sin 2i 1 sin 2f ct . (6.5-5)
T
4
We can now see that
si1
It
can
2E
2E
cos 2i 1 and si 2
sin 2i 1 .
T
4
T
4
be
easily seen that
si (t ) , for
i 1,2,3,4,
(6.5-6)
corresponds
to
m1m2 10,00,01,11, respectively. This is summarized in Table 6.5-1. An example
of the four signals is given in Fig. 6.5-2.
The block diagram describing a realization of a QPSK transmitter in Fig. 6.5-1
shows that a serial-to-parallel converter is used to convert a single bit stream into two
bit streams, producing two parallel signals si1 (t ) and si 2 (t ) as the baseband signals
that modulate cos( 2f ct ) and sin( 2f ct ) , respectively. These two waves are then
added up and transmitted as si (t ) . In the following, we shall explain the
demodulation process which correctly identifies m1 and m2 .
6-23
Table 6.5-1: Signal-space characterization of QPSK.
Input Digit (m1m2)
Phase
10
4
3 4
5 4
7 4
00
01
11
si1
si2
E 2
E 2
E 2
E 2
E 2
E 2
E 2
E 2
Fig. 6.5-2: The Four QPSK Signals si (t ) .for i 1,2,3,4. (a) Signal of s1 (t )
(b) Signal of s2 (t ) (c) Signal of s3 (t ) (d) Signal of s4 (t ) .
We now discuss how to demodulate the received signal. Note that the signal
si (t ) is determined by m1 and m2 . We shall show later that after this signal is
received, it will be demodulated to such an extent that m1 and m2 will be correctly
identified.
follows:
Let us consider Equation (6.5-1).
We may rewrite Equation (6.5-1) as
si (t ) A cos(2f c t ) B sin( 2f c t ) .
The job of demodulation is to detect A and B. Since cos(2f c t ) and
sin( 2f c t ) are orthogonal, to detect A, we multiply si (t ) by cos(2f c t ) and
6-24
integrate. Through this way, we eliminate B and only A remains. Similarly, to
detect B, we multiply si (t ) by sin( 2f c t ) and integrate. Now, A disappears and
only B remains. This is the basic principle of QPSK demodulation.
Based upon the principle presented in the above paragraph, demodulation at the
receiver can be accomplished by coherent demodulation with two reference sinusoids
that are ideally phase and frequency coherent with the carriers in the transmitter. A
QPSK detector is given in Fig. 6.5-3.
Fig. 6.5-3: Demodulator for QPSK.
The received signal is first multiplied by two sinusoids
2 T cos2fct and
2 T sin 2f ct . The results are then integrated respectively by two integrators.
The outputs of the integrators are sampled at t = T.
sampled output x1 can be expressed as
For noiseless case, the resulting
T
2
2
2
x1 si1
cos2f c t si 2
sin 2f c t
cos2f c t dt
0
T
T
T
2 T
2 T
si1 cos 2 2f c t dt si 2 sin 2f c t cos2f c t dt
T 0
T 0
2 T1 1
2 T1
si1 cos4f c t dt si 2 sin 4f c t dt .
0
0
T 2 2
T 2
6-25
(6.5-7)
Replacing f c nc T in the above equation where nc is a positive integer, we
have
x1 si1
2t
1
2
1
n T
n T
sin 4 c t si 2
cos 4 c t
T 2 8 nc T
T 0
T 8 nc T
T 0
2 T
2
1
1
.
si1 0 0 0 si 2
T 2
T 8 nc T 8 nc T
(6.5-8)
The last equality follows since sin( 4nc ) 0 and cos( 4nc ) 1 for any
positive integer nc . Therefore, from the above equation, we have
x1 si1 .
Similarly, we can show
T
2
2
x 2 si1
cos2f c t si 2
sin 2f c t 2 T sin 2f c t dt si 2 .
0
T
T
(6.5-9)
Therefore, the original messages s i1 and s i 2 can be separated at the receiver and
hence can be detected independently.
The sampled outputs x1 and x 2 are each
compared with a threshold of zero by the decision devices located at the upper and
lower channels, respectively. If x1 0 , a decision is made in favor of m1 1 for the
upper channel, but if x1 0 , a decision is made in favor of m1 0 . Similarly, for
the lower channel, if x2 0 , a decision is made in favor of m2 1 , but if x2 0 , a
decision is made in favor of m2 0 . Finally, these two binary sequences are
combined in a parallel-to-serial converter to reproduce the original binary sequence at
the transmitter input.
An example of QPSK signals is given in Fig. 6.5-4.
6-26
Fig. 6.5-4: Signals of QPSK.
(a) The Transmitted Signal.
(b) The Signal
y1 t st 2 T cos2f c t . (c) The Signal of y2 t st 2 T sin 2f c t . (d)
The Output of the Upper Integrator and the Corresponding Sampling Points.
Output of the Lower Integrator and the Corresponding Sampling Points.
(e) The
The transmitted signal s (t ) is given in Fig. 6.5-4 (a) which is a modulated
signal with the input bit stream “10011011”, where E 1 , fc = 1 Hz and T = 2 sec.
At the receiver, the signals after the multiplication of carriers denoted by
y1 t st 2 T cos2fct and y2 t st 2 T cos2fct are given in Fig.
6.5-4(b) and Fig. 6.5-4(c) respectively. The outputs from the integrators and the
corresponding sampling points x1 and x 2 are given in Fig. 6.5-4(d) and Fig.
6.5-4(e), respectively. Based on the sampled values, the decision output after the
parallel-to-serial converter is “1001101” which is exactly the same as the transmitted
sequence.
Let us here emphasize the basic principle of the QPSK system. The QPSK
system mixes two bits together and transmits them at the same time. Why can they
be detected correctly? This is due to the fact there are two orthonormal functions
6-27
1 t and 2 t contained in the expansion of si (t ) .
2 t are given by
1 t
2
cos2f ct
T
2
2 t
sin 2f ct
T
Specifically, 1 t and
0t T
(6.5-10)
0 t T.
It is easy to verify that 1 t and 2 t are orthonormal basis functions, i.e.,
t t dt 0
(6.5-11)
t dt 1
(6.5-12)
T
0
1
2
and
T
0
2
i
for i=1,2.
The transmitted signal therefore can be expressed as
si t si11 t si 22 t .
(6.5-13)
A look at Equation (6.5-13) will tell us that the demodulation of the QPSK
system can be done by multiplying si (t ) by 1 (t ) and 2 (t ) . Multiplying si (t )
by 1 (t ) will give us the value of s i1 and multiplying si (t ) by 2 (t ) will give us
the value of s i 2 . Once si1 (t ) and s i 2 are known, m1 and m2 can be
determined accordingly.
There are four vectors si ( si1 , si 2 ) for i 1,2,3,4 which can be represented
as signal pointsin the signal space diagram as shown in Fig. 6.5-5.
6-28
Fig. 6.5-5: Signal-Space Diagram of a Coherent QPSK System.
It is possible to increase the transmitted bit rate by increasing the number of
signals in the signal constellation. For example, we may double the number of
QPSK signals, resulting in 8 signal points as shown in Fig. 6.5-6. This signal
constellation is called 8PSK which can transmit three bits at each signaling interval
without increasing the transmitted bandwidth. However, under the same transmitted
signal energy per symbol, the distance between two nearest points in the 8PSK is less
than that of the QPSK, and hence it is more likely that an 8PSK detector will make
more errors than those of the QPSK systems. Therefore, we pay this by sacrificing
the bit error rate or increasing the transmitted signal energy to achieve the same bit
error rate as that of a QPSK system.
6-29
Fig. 6.5-6: Signal-space diagram of coherent 8PSK system.
6.6
Orthogonal Frequency Division Multiplexing (OFDM)
The modulation schemes introduced in previous sections require only one carrier with
a fixed carrier frequency. In this section, we introduce a modulation scheme using
many carriers with different frequencies. In general, such systems are called
multi-carrier systems. The orthogonal frequency division multiplexing (OFDM)
scheme is a special case of multicarrier systems, where a single data stream is
transmitted over a number of lower rate subcarriers, where every pair of subcarriers is
orthogonal.
In OFDM systems, the total signal frequency band is divided into N
non-overlapping frequency subchannels. Each subchannel is modulated with a
separate symbol and the N signals of all the subchannels are superimposed and
transmitted over the channel. Since all signals from all subchannels are mixed in the
transmitter, it is important to separate the information symbols from individual
subchannels at the receiver. The orthogonal property between subcarriers gives the
answer of this problem. The word orthogonal indicates that there is a precise
mathematical relationship between the frequencies of the carriers in the system. For
OFDM systems, the frequencies of all carriers are separated apart in such a way that
every pair of the carrier signals is orthogonal.
6-30
An OFDM signal consists of a sum of subcarriers that are modulated by using
phase shift keying (PSK) or quadrature amplitude modulation(QAM). For simplicity,
consider a binary PSK modulated OFDM system where N carriers are employed in
the system. In this case, N information bits are transmitted per OFDM symbol. That
is, in OFDM systems, N bits are transmitted in the same time unit. For the i-th bit,
if this bit is 1(0), mi is set to be +1(-1). Let T be the duration of the OFDM symbol;
then the transmission rate is N
T
bits/sec. Let ( m0 , m2 ,..., m N 1 ), where mk {1}
for 0 k N 1 , be the transmitted information bits. The OFDM signal can be
expressed as
s (t )
N / 2 1
m
k N / 2
kN / 2
c o s2( ( f c kf )t )
for 0 t T
(6.6-1)
where f c is the carrier frequency and f is the bandwidth of each subchannel. The
carrier frequency is set to be c
T
with c being a positive integer greater than N.
From Section 6.3, the OFDM system can be thought as a system that combines N
binary PSK's with different frequencies.
k (t ) 2 / T cos(2 ( f c kf )t )
Let
,
for
0t T
and
k N ,, ( N ) 1 . We can show that f 1 is the smallest channel spacing
2
2
T
so that i (t ) and j (t ) , for i j , are orthogonal. To verify the orthogonality
between i (t ) and j (t ) , we have
i (t ), j (t )
2 T
cos( 2 ( f c if )t ) * cos( 2 ( f c jf )t )dt
T o
2 T1
(cos( 2 (i j )ft ) cos( 2 (2 f c (i j )f )t )) dt
T o 2
1 for i j
0 for i j.
6-31
(6.6-2)
Therefore, i (t ) and j (t ) are orthonormal for i j . Now, for simplicity, assuming
that the received signal is received without distortion, we have the received signal
r (t ) s(t )
T N / 21
mk N / 2 (t ) for
2 k N / 2
0t T .
(6.6-3)
The problem now is how to demodulate the binary message m j N / 2 carried by
the jth subcarrier. The solution is to pass the received signal through a correlator that
correlates the signal j (t ) . The output of the jth correlator can then be expressed as
T
x j N / 2 = r (t ) j (t )dt
0
T
=
0
T N / 21
mk N / 2 k (t ) j (t )dt
2 k N / 2
(6.6-4)
T
T N / 21
=
mk N / 2 k (t ) j (t )dt
0
2 k N / 2
=
T
m jN / 2 .
2
The last equality follows since k (t ) and j (t ) are orthogonal for k j . Therefore, all
information bits contained in all subcarriers can be separated at the receiver and hence
can be detected independently. Fig. 6.6-1 illustrates a simple OFDM system with four
carriers. The carrier frequency f c is set to be 3 Hz and f is set to be 1Hz. The
information bits ( m0 , m1 , m2 , m3 ) are BPSK modulated to the carriers with 1,2,3, and 4
Hz, respectively. The resulting signals from each subcarrier are combined and
transmitted over the channel. At the receiver, a bank of correlators are employed to
separate the information bit carried by each subcarrier. The output signal from each
correlator is compared with a threshold. The threshold is set to be zero in this case. If
the output signal is greater than zero then a decision of 1 is made; otherwise a
decision of 0 is made.
6-32
Fig. 6.6-1: OFDM Transmitter and Receiver with 4 Subcarriers.
Fig. 6.6-2 shows all the four carriers for 0 t 1 .
In this example, all
subcarriers have the same phase and amplitude, but in practice the amplitude and
phase may be modulated differently for each subcarrier. Fig. 6.6-3 shows all the
possible waveforms as ( m1 , m2 , m2 , m3 ) ranges over all the 16 possible values.
6-33
Fig. 6.6-2: OFDM Carrier Signals.
Fig. 6.6-3: All 16 Possible Combinations of OFDM Signals.
6-34
One advantage of the OFDM technique is that the modulator and the
demodulator can be easily implemented by discrete-time Fourier transform (DFT),
and hence the fast Fourier transform (FFT) introduced previously can be employed in
OFDM systems. Essentially, we shall point out that one of the steps in modulating
the input signal can be implemented by using the inverse discrete Fourier transform
technique.
From Equation (6.6-1), we have
N 1
2
s (t )
2
N 1
2
k N
mk N cos( 2 ( f c kf )t )
2
k N
mk N cos( 2
2
2
k
t 2f c t )
T
for 0<t<T
(6.6-5)
2kt
N2
j
Re mk N e T e j 2f ct .
k - N
2
2
Let
s' (t )
N 1
2
k N
mk N e
j
2kt
T
.
(6.6-6)
2
2
The term s ' (t ) is called the equivalent baseband signal of s (t ) .
Then
s(t ) Re( s' (t )e j 2f ct ) .
(6.6-7)
Let
s' (t ) s1 ' (t ) js2 ' (t ) .
(6.6-8)
We can now see that
s(t ) Re( s' (t )e j 2f ct )
Re (( s1 ' (t ) js2 ' (t ))(cos( 2f c t ) j sin( 2f c t )))
Re (( s1 ' (t ) cos( 2f c t ) s 2 ' (t ) sin( 2f c t ))
(6.6-9)
j ( s 2 ' (t ) cos( 2f c t ) s1 ' (t ) sin( 2f c t )))
s1 ' (t ) cos( 2f c t ) s 2 ' (t ) sin( 2f c t ).
Equation (6.6-9) shows that s (t ) can be obtained after s ' (t ) is obtained.
6-35
The term
s ' (t ) can be obtained by a straightforward implementation.
But this requires the
multiplication of cosine and sines by hardware, which is by no means easy.
following, we shall introduce a method to obtain s ' (t ) efficiently.
Note that s ' (t ) is defined in Equation (6.6-6).
In the
In Equation (6.6-6), the mi ' s
have already been given and our job is to compute s ' (t ) for all t.
A look at Equation
(6.6-6) will remind us that we are dealing with a case which is quite similar to the
inverse Fourier transform introduced in Sections (4.6) and (4.7). Thus, our method
to find s ' (t ) will consist of the following two stages:
(1) Instead of computing s ' (t ) for all t, we only compute s ' (t ) for N sampling
points. The bandwidth of s ' (t ) is approximately equal to fN / 2 N /( 2T ) ,
since there are approximately N carriers each with channel bandwidth f
distributed over the frequency band from f (N / 2) to f ( N / 2 1) . Therefore,
the minimum sampling rate is N/T. That is, for n 0,1, 2, , N 1, we compute
the following points:
si ' s' (
iT
)
N
for i 0,1, 2,, N 1 .
Later, we shall prove that the computation of s i ' s is equivalent to computing an
inverse discrete Fourier transform.
(2) After we have obtained s0 ' , s1 ' ,, s N 1 ' , we can perform an extrapolation to
obtain s ' (t ) for all t.
Let us go back to the problem of computing s0 ' , s1 ' ,, s N 1 ' . From Equation
(6.6-6),
si ' s ' (iT
N 1
2
k N
)
mk N e j 2k (iT / N ) / T )
2
2
N 1
2
k N
N
2
2
N 1
2
mk N e j 2ki / N
k 0
(6.6-10)
mk N e j 2ki / N
2
1
k N
mk N e j 2ki / N .
2
2
6-36
Let k ' k N ; the second term of the Equation (6.6-10) can be expressed as
1
k N
m
e j 2 ( k ' N )i / N
2
2
m
k ' N
e j 2k 'i / N e j 2 ( N )i / N
2
m
k ' N
e j 2k 'i / N e j 2i
2
2
N 1
m
k ' N
(6.6-11)
2
N 1
k ' N
k ' N
N 1
k ' N
2
2
N 1
k ' N
mk N e j 2ki / N
k ' N
e j 2k 'i / N .
2
2
The last equality follows since e j 2i 1 . Now, we may rewrite (6.6-10) as
si '
N / 2 1
k 0
mk N / 2 e
j
2ki
N
N 1
+
m
kN / 2
k N / 2
e
j
2ki
N
.
(6.6-12)
Now define
mk N / 2 for 0 k N / 2 1
Ak '
mk N / 2 for N / 2 k N 1.
(6.6-13)
We have
N 1
si ' Ak ' e
j
2ki
N
.
(6.6-14)
k 0
From Equation (6.6-14), we can see that the finding of si ' s is equivalent to
computing the inverse discrete Fourier transform of Ai ' s as discussed in Section 4.7,
where Ai ' is defined in Equation (6.6-13) and is known because mi 's are known to
us. Therefore, the discrete-time equivalent of the modulated signal s ' (t ) can be
obtained by performing an inverse discrete-time Fourier transform of. Ai ' . In
practice, this transform can be implemented very efficiently by the inverse fast
Fourier transform (IFFT). The IFFT drastically reduces the number of calculations by
exploiting the regularity of the exponential functions.
6-37
Let us summarize the above discussion as follows:
(1) Our major job is to find s (t ) as defined in Equation(6.6-5).
(2) We define s ' (t ) according to Equation (6.6-6) and let
s' (t ) s1 (t ) js2 (t ) .
as in Equation (6.6-8).
Then, according to Equation (6.6-9),
s(t ) s1 (t ) c o s2( f c t ) s2 ' (t ) s i n2( f c t ) .
'
(3) To find s ' (t ) , we first obtain A0 ' , A1 ' ,, AN 1 ' from m0 , m1 ,, m N 1 according
to Equation (6.6-13).
(4) We compute the inverse discrete Fourier transform of A0 ' , A1 ' ,, AN 1 ' and
iT
).
N
(5) Having obtained s0 ' , s1 ' ,, s N 1 ' , we perform an extrapolation on them to obtain
obtain s0 ' , s1 ' ,, s N 1 ' where s i ' s ' (
s ' (t ) .
(6) Having obtained s ' (t ) , we can use Equation (6.6-9) to obtain s (t ) .
If we do not use the above procedure to obtain s (t ) , we have to use Equation
(6.6-5). Note that Equation (6.6-5) involves a large number of multiplications and it is
complicated to design a hardware to implement it. The fast inverse discrete
Fourier transform used in the above procedure, on the other hand, is much easier to be
implemented, as discussed in Chapter 4.
Similarly, the fast Fourier transform (FFT) can also be used in the receiver for
demodulating the received signal. Fig. 6.6-4 illustrates a simple OFDM system
that employs the IFFT as the modulator and FFT as the demodulator. Since the
output of the IFFT is a discrete time signal, it has to be converted to continuoustime signal by a parallel-to-serial converter followed by a digital-to-analog (A/D)
coverter. The resulting signal is then up converted to the desired frequency band
by multiplying the carrier with frequency f c . In the receiver, the received signal is
6-38
first down converted to the basedband equivalent signal by multiplying the carrier
with frequency f c , resulting the signal s ' (t ) for distortion-less case. The resulting
signal is then sampled by an analog-to-digital (A/D) converter to perform the
extrapolation as mentioned above, with sampling rate N/T. A serial-to-parallel
converter is then employed to store the samples, resulting in the samples si 'i 0 .
N 1
Finally, an FFT is employed to recover
Ak 'kN01
from si 'i 0 by taking the FFT of
N 1
si 'iN01 .
A0'
s0'
A1'
s1'
IFFT
sN' 1
AN' 1
Parallel s
i
to Serial
converter
Band-Pass
Filter
D/A
e j 2f ct
CHANNEL
A0'
s0'
A1'
s1'
FFT
AN' 1
sN' 1
Serial to
Parallel
converter
si
Band-Pass
Filter
A/D
e j 2f ct
Fig. 6.6-4: A Simple OFDM System with the IFFT and FFT.
6.7 The Role of Inner Product in Digital Modulation
In the above sections, although different modulation techniques have been
introduced, there is actually a common basic principle: to use the inner product
concept. Consider the binary frequency shift keying (FSK) system, for instance. In
this case, we have two signals: cos 2 f1t and cos 2 f 2 t . At any moment, either
we receive cos 2 f1t or cos 2 f 2 t . Let the received signal be denoted as y (t ).
6-39
To detect which signal we have received, we may use the inner product concept.
Suppose we multiply y (t ) by cos 2 f1t and integrate. If the result is 1, we know
that we must have received cos 2 f1t . If the result is 0, we must have received
cos 2 f 2 t . This is the basis of our demodulation mechanism. That our mechanism
works is due to the fact that the two signals, namely cos 2 f1t and cos 2 f 2 t , are
othogonal.
Let us now consider the quadriphase-shift keying system (QPSK).
we have a mixed signal as follows:
si t si1
In this case,
2
2
cos2f ct si 2
sin 2f ct .
T
T
Our job is to detect s i1 and s i 2 . This can be easily done because cos(2f c t ) and
sin( 2f c t ) are orthogonal. To detect s i1 , we multiply si (t ) by cos(2f c t ) and
integrate and to detect s i 2 , we multiply si (t ) by sin( 2f c t ) and integrate. That
this will work is due to the fact that cos(2f c t ) and sin( 2f c t ) are orthogonal as
pointed out in Chapter 3.
Finally, the reader can now easily see why the orthogonal frequency division
multiplexing scheme works. Although we have mixed a set of signals with different
frequencies, we have made sure that they are orthogonal to one another.. To detect the
signal with a certain frequency, say f c if , we only have to multiply the received
signal with cos(2 ( f c if )t ) and integrate. Only the associated coefficient,
namely mi N / 2 , survives and all of the other coefficients vanish.
6-40