RESEARCH INITIATIVES FOR IMPROVING THE SAFETY OF
OFFSHORE HELICOPTER OPERATIONS*
David Andrew Howson (dave.howson@srg.caa.co.uk)
Research Project Manager
UK Civil Aviation Authority, London, UK
Abstract
Since the late 1980’s, the UK Civil Aviation Authority (CAA) has been leading a programme of research aimed at
improving the safety of offshore helicopter operations. The motivation for this initiative came from a major joint
CAA/Industry review of helicopter airworthiness, commissioned in 1982. This study led to a number of research
projects and other reviews which, in turn, led to further research projects. A total of over 20 projects have been
undertaken covering airworthiness and operational issues, and covering helicopters and helidecks. This
programme of work has been jointly funded and monitored by the UK CAA-run Helicopter Safety Research
Management Committee (HSRMC). This paper provides a top-level summary of current activities on the seven
main ‘live’ research projects.
Introduction
[1] following the loss of 45 lives in the Chinook
accident in 1986. The committee is still thriving and
has evolved over time expanding its membership to
include the UK MoD, the UK helicopter operators
(BHAB), the new European Aviation Safety Agency
(EASA), the Norwegian CAA, the Norwegian oil
industry (OLF), and the European Helicopter
Association (EHA).
In the 1970’s and early 80’s the disappointing safety
record of helicopters transporting people to work on oil
rigs in the North Sea led to the formation of the
Helicopter Airworthiness Review Panel (HARP). This
group reported its findings in the HARP Report (CAP
491) [1] in 1984, which contained recommendations
for research into helicopter health and usage
monitoring, crashworthiness and ditching. The HARP
Report also called for an investigation of human
factors-related accidents which led to the formation of
the Helicopter Human Factors Working Group. This
group reported its findings in CAA Paper 87007 [2] in
1987, which included recommendations for research
into a further seven, mainly operational areas.
To date, the committee has overseen over £8M of
research funding spread over a wide range of
helicopter safety issues, the majority of which have
their ultimate origins in the HARP Report. The
remainder of this paper provides a top-level summary
of current activities on the following seven main ‘live’
projects overseen by the HSRMC:
In addition to these two initiatives, a major review of
offshore safety and survival was commissioned in
1993 in response to an AAIB recommendation
following the fatal accident at the Cormorant A
platform in 1992. This study was conducted by the
Review of Helicopter Offshore Safety and Survival
(RHOSS) working group, which reported its findings in
CAP 641 [3] in 1995. The overall effect of this exercise
on the helicopter safety research programme was to
add impetus to the crashworthiness (water impact)
and ditching projects.
The resulting programme of helicopter safety research
has been funded and monitored by the UK CAA-run
Helicopter Safety Research Management Committee
(HSRMC). The HSRMC was originally set up by UK
CAA in the late 1980's to manage a joint UK CAA/UK
Government/UK oil industry (UKOOA) research fund
that was created to progress the recommendations of
*
Helicopter Health & Usage Monitoring Systems
(HUMS) - Advanced Analysis Techniques.
Helicopter Emergency Flotation.
Helideck Environmental Issues - Turbulence
Criterion.
Operations to Moving Helidecks.
Helideck Lighting.
Helicopter Flight Data Monitoring - Extension to
Low Airspeed Regime.
Use of GPS for Offshore Helicopter Operations
- Low Visibility Approaches.
Helicopter Health & Usage Monitoring Systems
(HUMS) - Advanced Analysis Techniques
Background
The first vibration health monitoring (VHM) systems
(known as ‘HUMS’) were installed on the North Sea
Presented at the International Helicopter Safety Symposium 2005, Montréal, Canada, September 26-28, 2005.
Copyright © 2005 by the American Helicopter Society International, Inc. All rights reserved.
1
helicopter fleet in the early 1990s which, the CAA
believes, contributed significantly to a reduction in the
airworthiness-related accident rate. Although inservice experience continues to demonstrate
significant
safety
benefits,
it
is
generally
acknowledged that there is room for improvement in
the diagnostic performance of HUMS. One study has
suggested that for every four ‘successes’ there is one
where a propagating defect was subsequently judged
to be ‘evident’ but no warning was given as no
warning threshold was exceeded.
Experience has shown that the above issues can be
mitigated through the use of well-trained and
experienced human analysts. In the in-service
environment, however, it is impractical for human
analysts to examine all data in sufficient depth due to
the large quantities generated on a daily basis. Hence
a crucial factor in improving the effectiveness of
HUMS is the establishment of a more sophisticated
means of identifying the sections of data of interest. If
this can be achieved it will result in a reduction of the
quantity of data requiring detailed analysis, enabling
human analysts to focus their efforts where their skills
are still essential.
In addition to the in-service experience, the ongoing
review of the results of the two HSRMC funded
helicopter main rotor gearbox (MRGB) seeded defect
test programmes has indicated that there is scope for
improving the effectiveness of HUMS data analysis.
The main issues identified as requiring attention are:
robust and capable analysis technique is
therefore required if effectiveness is to be
improved.
accommodation of reducing gear indicator
trends - certain types of defect can manifest
themselves as reducing indicator trends. A
technique is required that can detect these.
improvement of warning time (i.e. the time
between warning and component failure) - when
conducting
retrospective
analyses,
the
presence of defects is nearly always apparent
to analysts in the data in advance of any
indicator thresholds having being exceeded,
and hence any warnings being generated. It
should be borne in mind, however, that if a
warning and the associated indicator histories
are not judged conclusive, it is common practice
to fly-on while ‘close monitoring’ for a defect.
Hence improvement in warning time must not
be at the expense of the warning’s ‘quality’ for
maintenance decision making.
detection of build defects - many warning
thresholds are tailored on installation of the
component/assembly using a simple ‘learning’
process. This improves sensitivity without
increasing the false alarm rate. However, in the
event of a build anomaly or defect these
thresholds are set too high, effectively desensitising the analysis to the subsequent
propagation of defects. Additionally, during the
‘learning’ period the threshold will, at best, be at
a higher fleet average based level, further
reducing the protection against defects
introduced by build/maintenance errors. Hence
a system that can provide increased sensitivity
without increasing the false alarm rate and
without requiring a ‘learning’ period after each
maintenance action would represent a
significant improvement.
accommodation of unexpected gear indicator
reactions - the identification of defects in a
timely manner can be compromised by the rigid
application preconceived ideas on how defects
will manifest themselves in the vibration data.
Experience has demonstrated that a wide range
of reactions is possible, both in terms of which
indicators react and how they respond. A more
Earlier Research
As part of CAA’s helicopter MRGB seeded defect test
programme, a number of alternative health monitoring
techniques were evaluated. These included alternative
sensors (e.g. stresswave sensors, acoustic sensors),
and a number of alternative analysis techniques. In
general, these alternatives were not able to
demonstrate any significant improvement over the
VHM techniques in-service at the time they were
evaluated.
One notable exception was the programme of work
aimed at demonstrating the benefits of supervised and
unsupervised machine learning techniques. The scope
of the project included the blind analysis of data from
two of the S61 MRGB seeded defect tests. The work
was completed in 1998 and the final report was
published as CAA Paper 99006 [4].
The analysis of the seeded defect test data is covered
in Study II of [4], and it is this section of the work that
is of direct relevance to the current research. Although
success was achieved with supervised machine
learning, the absence of large numbers of examples of
all possible failure conditions is expected to limit this
technique to a retrospective response to in-service
incidents. Conversely, given the vast quantities of data
available to characterise serviceable components
and/or systems and in view of the results of the blind
analysis, unsupervised machine learning is considered
to have great potential as a proactive tool.
This work was presented to both the CAA/Industry
Helicopter Health Monitoring Advisory Group
(HHMAG) in 1999 and to a Royal Aeronautical Society
conference in March 2000, and CAA encouraged
industry to exploit the results and develop the
techniques for use in-service on civil helicopters.
2
Current Research
most promising ideas cited in the literature.
No further development of advanced HUMS data
analysis techniques had taken place by 2003,
however, when a significant HUMS missed detection
involving a Super Puma bevel pinion occurred. The
seriousness of this incident persuaded CAA to take
the lead in developing the technology and, following a
competitive tendering process, Smiths Aerospace
Electronic Systems - Southampton, UK, were
commissioned to conduct the research required. The
overall objective of the project is to demonstrably
improve the effectiveness of HUMS through the
enhancement of VHM data analysis, and comprises
the following tasks:
The extensive archive of BHL HUMS data downloads
has been decoded, ‘cleaned’ and catalogued in a SQL
Server database in preparation for system
development and testing. This was a significant but
necessary task and included data for Super Puma
main rotor, intermediate, tail and left and right
accessory gearboxes.
Analysis of this data so far has shown it to be ‘noisy’
and, as expected, revealed that gearboxes tend to
exhibit individual behaviour. Another challenge has
been the inability to identify a ‘healthy’ data set for the
development of anomaly detection models. All data
has been found to contain some anomalies and,
because of the lack of feedback from overhauls, the
status of all data not containing documented faults can
only be classed as ‘unknown’. A further challenge is
the fact that the data contains many step changes,
which are assumed to be due to unidentified
maintenance actions on other parts of the helicopter.
This has resulted in the work becoming more of a
research effort than was originally envisaged.
Furthermore, whilst data normalization techniques
should be utilized wherever possible, for the VHM data
pre-processing options are limited to filtering, and
relatively simple techniques for characterising
indicator trends. This places more emphasis on
modelling and the analysis of model information.
However, as a result of an intensive data analysis
effort, there is now a high confidence that cluster
modelling can reveal anomalous behaviour and can
be used to characterise the significance of anomalies.
The key on-going task is to determine the optimum
structure for these models and define the best
anomaly metrics.
a review of existing literature judged to be
relevant to the project, CAA Paper 99006 in
particular;
development of the advanced HUMS data
analysis techniques based on historical data;
the design and production of analysis software;
an off-line demonstration of the system and any
consequent refinement;
an in-service demonstration of the system.
The in-service demonstration is to be performed by
Bristow Helicopters Ltd (BHL) at their Aberdeen, UK,
base. The system will be installed/implemented in
parallel with the existing HUMS ground station such
that incoming HUMS data is analysed concurrently.
This will be accomplished in a manner that does not
affect the integrity of the existing ground station or
analysis, i.e. all warnings provided by the existing
analysis will be acted upon as usual, regardless of the
output of the improved analysis.
Differences between the reactions of the existing and
new analyses will be noted and compared. Feedback
from any inspections or other maintenance actions or
strip reports will be collected and catalogued with the
associated results from both the new and existing
analysis techniques.
An important aspect of the in-service trial is the
evaluation of the system in terms of ease of use and
workload. BHL are tasked with reporting on this aspect
of the work from a user’s perspective.
Progress on Current Research
As at end June 2005 the literature survey had been
completed and a large number of references on
anomaly detection identified. Although many focussed
on ‘intrusion detection’ on computer networks, most
had general applicability. A few papers were related to
aircraft health monitoring, the most relevant being
related to novelty detection in jet engines. The survey
confirmed that the data mining tool proposed for the
research has the algorithms necessary to evaluate the
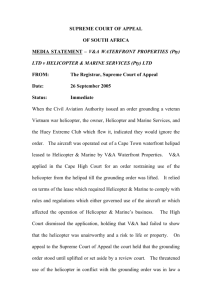
Figure 1 - Cluster plot of 2 VHM indicators from
AS332L LH Accessory Gearbox.
3
By way of an illustration, the plot in Figure 1 presents
data trend information for two HUMS parameters in a
multi-parameter cluster model. The light areas show
outlying regions in the parameter space being
modelled by a particular ‘anomaly cluster’. Any data
trends moving into these regions would be classed as
anomalous.
that occupants who do not escape from the cabin
within seconds are likely to drown.
Additional emergency flotation systems were devised
(e.g. see Figure 2) to prevent total inversion following
capsize. A total of ten schemes were initially proposed
and ranked by a team of naval architects and
helicopter designers. The top three were tested using
a helicopter model in a wave tank, and two found to be
practical and effective [8].
Subject to a satisfactory off-line demonstration of the
system, the in-service trial is scheduled to start late
2005 and will last for six months. The project includes
an option to extend the trial for a further six months
should this be judged necessary.
Helicopter Emergency Flotation
Forced landing on the water (‘ditching’)
For extended over water flights (being in the UK
beyond autorotation distance from land for a single
engine helicopter, and more than 10 minutes flying
time from a suitable forced landing site for a multiengine helicopter), emergency flotation systems (EFS)
have been mandated on UK offshore helicopters since
the 1970s. However, it is difficult or impossible to
design practical flotation systems that will keep a
helicopter afloat and stable in the severest weather
conditions. In [5] it was shown that, on average in the
North Sea, a helicopter making a controlled landing on
the water, and fitted with an emergency flotation
system compliant with the guidance [6], might expect
to be capsized by the waves in about 30% of cases.
Figure 2 - Tank test model of helicopter fitted with
additional auxiliary emergency flotation to prevent
total inversion [8].
Figure 3 shows the floating attitude of the helicopter
following capsize, illustrating that the windows and
doors remain above the waterline on one side of the
fuselage. In addition, there is a significant air pocket
remaining in the cabin, removing the time pressure to
escape.
Research into the design of EFS was undertaken in an
attempt to improve the odds. Model tests conducted
by British Hovercraft Corporation in the mid 1980s had
investigated raising the float attachment positions in
order to float the helicopter lower into the water, and
the addition of water scoops to the emergency
flotation bags (as routinely used on inflatable liferafts
in order to improve stability). The former was found to
give variable and inconclusive results, depending
primarily on helicopter type and loading condition. The
latter was seen to provide a uniform benefit, however,
increasing the helicopter capsize threshold by about
one sea-state. The benefits of float scoops, and their
relatively low cost were described in [7].
Even with float scoops fitted, the probability of a
capsize when alighting on the water on the UK
continental shelf was still considered to be too high,
hence the decision was taken to attempt to mitigate
the consequences of a capsize by preventing the
helicopter from turning to a completely inverted
attitude. When this happens the cabin rapidly fills with
water, and escape becomes very difficult and
hazardous because all the escape routes are
submerged. The incompatibility between the time
needed to escape and typical breath hold times in the
low water temperatures prevalent in the region means
Figure 3 - Floating attitude with auxiliary flotation
following capsize [8].
Following the demonstration that the auxiliary flotation
was practical and effective, a human factors study was
conducted in a helicopter underwater escape trainer
(HUET) to check that it was indeed easier to escape
from a side-floating helicopter than a fully inverted
one.
4
The study used 30 naive subjects who were trained,
and then evaluated in simulated escapes from fully
inverted and side floating cabins in the training facility
tank. This confirmed the expected benefits of the side
floating arrangement [9]. Work on a helicopter typespecific design study on emergency flotation systems
designed to prevent total inversion following capsize
originally scheduled for 2002 was delayed due to
budgetary pressures following 9/11. It is now planned
that work will start in 2005. This study is necessary to
establish the practicality of the scheme for both retrofit
to existing helicopters and for new build aircraft.
expected to improve performance following a severe
impact. A high level cost benefit analysis indicated that
the modifications were also cost-effective, and a
number are already incorporated into modern EFS
design.
Crashes onto water
The primary purpose of emergency flotation systems
has always been to keep the helicopter afloat following
a controlled landing on the water. These systems tend
to be much less effective when a helicopter crashes
into the water either because they are damaged in the
impact, or because they have to be manually triggered
to inflate by the pilot who may be disabled by the
impact. Studies of helicopter crashes onto water [10,
11, 12, 13, 14] have concluded that the primary cause
of loss of life following water impact is drowning, and
that improvements in the capability of helicopters to
remain afloat after impact long enough for the
survivors to escape is the major factor in improving
occupant survivability.
Figure 4 – Example result from [15] showing
plastic strain experienced by airframe during a
vertical impact with the water.
In contrast to the detailed deterministic investigation of
three crash scenarios, the second study [16] looked at
the statistics and variability of the wide range of
possible crash scenarios and sea conditions. It was
found that, as expected, the variability in crash velocity
and loading was extremely large as can be seen in
Figure 5.
Research was therefore commissioned by CAA to
investigate ways of improving the crashworthiness of
emergency flotation systems. Two studies were
performed [15, 16]. The first investigated water
impacts and their effect on the helicopter airframe in
general, and on the emergency flotation system in
particular. Non-linear finite element analysis was used
to study three specific accident scenarios from which
there were a significant number of survivors, but which
were all outside the Federal Aviation Administration
proposed 95% survivability ditching envelope [1]. The
three scenarios comprised a vertical drop from a
helideck, a horizontal ‘fly-in’ impact, and a loss of
control accident featuring intermediate vertical and
horizontal impact velocities. A review of EFS design
was also undertaken to identify design features that
would improve overall system functionality, reliability
and operation following an impact. A high-level cost
benefit analysis and a review of regulatory
requirements were also performed.
Again, three basic crash scenarios were investigated
together with a forced landing or ‘ditching’, using a
Monte Carlo simulation to exercise the variability of
the impact parameters including the velocities, angles
and sea states. The clouds of points in Figure 5 show
the variability in vertical and horizontal impact velocity
experienced by the helicopter in the simulation. The
four main crash and ditching scenario populations are
labelled. In each case the indicate occurrences
where the flotation system design loads were not
exceeded, while each + indicates overload and
presumed failure. The figure also shows the impact
velocity boundaries for the current ditching flotation
system certification requirements, and the FAA
proposed 95% survivability envelope.
This study concluded that a very substantial increase
in flotation design loads would be required in order to
make a difference to the survivability. In fact doubling
the design loads would only result in a very modest
improvement in crashworthiness.
Although good validation was achieved for vertical
impacts, the results from the non-linear finite element
analysis demonstrated a number of major difficulties in
adequately modelling the physics of the airframe /
water impact for horizontal ‘fly-in’ scenarios. Figure 4
shows an example result, in this case for a vertical
water impact. The study also came up with several
EFS
design
modifications
(automatic
EFS
arming/deployment in particular) that would be
The most important outcome of this study was in
highlighting the major benefits of flotation unit
redundancy, particularly additional flotation units in a
less vulnerable impact location high on the cabin
walls. (The same floats proposed for preventing total
5
inversion, and shown in Figures 2 and 3.)
30% probability that the 4-flotation unit helicopter will
sink, whilst with 6 units the helicopter has sufficient
redundancy to remain afloat in the severest of the
crashes modelled.
Figure 6 shows results from three different flotation
configurations with different levels of redundancy. It
can be seen that for high impact crashes there is a
Figure 5 – Scatter plot from [16] showing vertical and horizontal impact velocities of helicopter for four
different scenarios: loads on fuselage panel greater and less than design load.
Percentage of impact events where the helicopter sinks, within each impact severity index curve,
for different panel configurations
50
4 panels
5 panels
40
6 panels
Percentage
30
20
10
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
Impact severity index
Figure 6 – Percentage of sea impacts causing helicopter to sink. Up to 6 flotation units, with 4 required to
remain afloat [16].
6
Potential changes to airworthiness requirements
criterion in CAP 437 in combination with a system of
operational feedback (turbulence report forms) appears
to have served to contain the situation, the absence of a
specific turbulence criterion in CAP 437 is regarded as
anomalous and unsatisfactory.
The CAA presented the findings from its ditching and
water impact research to the JAA Helicopter Offshore
Safety and Survivability (HOSS) working group and to
the FAA/JAA/Industry Joint Harmonisation Working
Group (JHWG) on Water Impact, Ditching Design and
Crashworthiness (WIDDCWG). Both groups produced
working papers recommending similar changes to the
current JAR/FAR 27 and 29 airworthiness requirements
relating to helicopter ditching and water impact
crashworthiness, both of which have been published in
annexes to CAA Paper 2005/06 [17].
Development of a Turbulence Criterion
In 2000, the CAA therefore commissioned a programme
of work with the primary objective of developing an easyto-use maximum safe turbulence criterion for all
helicopter operations to offshore helidecks. The basic
assumption behind the approach taken to this work was
that the margin of safety available at any point during the
sections of flight of interest is inversely proportional to
pilot workload, i.e. the higher the workload, the lower the
margin of safety. Hence, in order to establish a
maximum safe turbulence criterion, it was necessary to:
The need for a review of the requirements was accepted
by the JAA/FAA Rotorcraft Steering Group (RSG). The
issues raised in the working papers were split into those
requiring changes to the advisory material only, and
those involving rule changes. Unfortunately little
progress has been made. The two follow-on groups
called for by the JAA/FAA RSG have yet to be set up,
and the JAA has now been superseded by the new
European Aviation Safety Agency (EASA), which
assumed responsibility for airworthiness requirements in
September 2003. The follow-on tasking, however,
presently forms part of EASA’s 2005/7 work programme.
quantify pilot workload and define a maximum
safe limit; and
establish a generic relationship between pilot
workload and an appropriate measure of
turbulence.
A well-established and widely accepted measure of pilot
workload exists in the Cooper-Harper aircraft handling
qualities rating (HQR) scale devised by NASA in the
1960’s [21]. This involves structured pilot debriefing to
arrive at a rating on a scale of 1 to 10 where 1 is benign
and 10 is unacceptable (see Figure 7). A safe upper limit
of pilot workload can readily be identified by reference to
the descriptions of task performance and pilot workload
associated with each rating.
CAA plans to complete the helicopter type specific
design study on emergency flotation systems designed
to prevent total inversion following capsize in time to
feed the results into the regulatory activities.
Helideck Environmental Issues - Turbulence
Criterion
Background
A top-down review of helideck environmental issues,
commissioned by UK CAA and the Offshore Safety
Division of the UK Health and Safety Executive (HSE) in
response to a UK Air Accidents Investigation Branch
(AAIB) recommendation following the heavy landing on
the Claymore Accommodation Platform on 18 August
1995 [18], highlighted the absence of a specific
turbulence criterion. The final report for this study,
published as CAA Paper 99004 [19], recommended that
a scientific basis be established for a limit on the
permitted level of turbulence in the vicinity of offshore
platforms.
The importance of considering turbulence as a specific
hazard had also previously been illustrated in the results
of a questionnaire survey of offshore helicopter pilots,
reported in CAA Paper 97009 [20]. In this study,
turbulence around platforms was ranked by pilots as
being the greatest of the fifteen factors contributing to
workload and safety hazards that were considered.
Hence, although the existing vertical wind speed
Figure 7 - Workload rating scale.
No precedents for establishing a relationship between
pilot workload and turbulence were found to exist,
however, and so addressing this issue effectively formed
the main focus of the research. Although challenging in
7
its own right, this task was exacerbated by the
requirement that the resulting relationship be generic,
i.e. not dependent on pilot, aircraft or offshore platform.
The results from the tests provided a 3-axis turbulent
environment with realistic spatial variation in mean
velocity and turbulence. Using this data, complete
approaches could be flown in the simulator in a realistic
turbulence field.
A number of tools and models were assembled in the
course of the programme. The key components are
illustrated in Figure 8 and are briefly described below.
Piloted Simulation
The left hand stream of work in Figure 8 is the piloted
simulation that employs a helicopter model and visual
database to allow a pilot to assess the severity of the
platform airwake, as measured in the wind tunnel tests,
and award a Cooper-Harper handling qualities rating to
flying tasks in various wind conditions. The simulation
was targeted at a single helicopter/platform combination
using a computer model of the Sikorsky S-76 and a
visual database of the Brae-A platform.
The piloted simulation exercise formed the core of the
project and produced the relationship between
turbulence and pilot workload used to establish the
turbulence criterion. The three pilots that took part were
all experienced and qualified test pilots who had flown
recently to offshore platforms, although not necessarily
the Brae A platform modelled for this study.
A range of test points were flown whilst varying wind
speed, wind direction and aircraft weight. Wind
directions were chosen such that various parts of the
platform superstructure were positioned directly upwind
of the helideck as well as one direction where there were
no such obstructions.
Desktop Simulation
In the centre of Figure 8 is the desktop simulation that
uses the same helicopter model as the piloted
simulation, but a pilot model and workload predictor
replaces the human in the loop. The pilot model
synthesises the control activity required to perform
manoeuvres in the presence of the measured flow, and
the workload predictor estimates the level of workload
indicated by the control activity. The result is a workload
rating expressed on a scale that parallels the CooperHarper HQR scale. Some of the data from the piloted
simulation was required as ‘training data’ to configure
the workload predictor, but the bulk of the information
has been used to validate both the workload predictor in
isolation and the entire desktop simulation process.
Figure 8 - Overview of tools and models for
prediction of pilot workload.
Wind Tunnel Tests
At the top of Figure 8 is the wind tunnel data that
provides measurements of the disturbed airwake around
the offshore platform of interest. Such data are normally
generated for new or modified platforms before entering
service during the development of an appropriate safety
case. However, due to the unsuitability of this data it was
necessary to collect new data specifically for this project.
A special series of tests was performed on a 1:100 scale
model of the North Sea Brae A platform in order to
provide input for the piloted flight simulation trials and
the desktop simulation exercises. The platform model
was rotated on a turntable in the wind tunnel to
represent a range of wind directions. These directions
were chosen so that the flow was sampled when the
helideck was upwind and unobstructed, and also when it
was downwind of identifiable obstructions to the wind
flow such as the drilling derricks, or gas turbine exhaust
stacks.
The exact form of the workload predictor is as follows:
Workload Rating = c1 + c2 σ(ξ) + c3 σ*(ξ) + c4 σ(η) + c5
σ*(η) + c6 σ(θ0) + c7 σ*(θ0)
where:
c1 – c7 = predictor coefficients
ξ = lateral cyclic position
η = longitudinal cyclic position
θ0 = collective lever position
8
σ(x) = function : standard deviation of x
σ*(x) = function : standard deviation of first derivative
of x with time
standard deviation of the vertical flow gives the
turbulence criterion in its current form:
The standard deviation of the vertical flow must be
less than 2.4 m/s for safe flight to be maintained.
The yaw pedal position was excluded from the workload
predictor, as this was not seen to contribute significantly
to the overall workload during development of the
predictor.
The overall role of the desktop simulation in the
development of the turbulence criterion was to provide a
relatively detailed model with which to explore the
generality of the relationship between turbulence and
workload without recourse to a multitude of expensive
and time consuming piloted simulation trials to consider
different helicopter and platform combinations. The
methodology was to validate the desktop simulation
against the available data for S-76 / Brae-A piloted
simulation exercise, and then to investigate the influence
of key helicopter design parameters on the predicted
workload, and to apply the desktop simulation to other
platforms and compare the results with predictions using
the relationship established between turbulence and
workload from the piloted simulation exercise.
Turbulence Criterion for Safe Helicopter Operations
Lastly, on the right of Figure 8 is the relationship
between turbulence and workload, developed to define
the turbulence criterion that is applied to wind tunnel test
results to establish a safe operating envelope for the
corresponding offshore platform. The criterion is
required to be easily applied and appropriate for use
across any helicopter / platform combination.
Figure 9 - Pilot HQR plotted against standard
deviation of vertical wind velocity component.
All the samples of turbulence used for the piloted
simulation trial were examined to establish a suitable
metric for use in defining a relationship between
turbulence level and pilot workload. The properties of the
data were found to be such that only a single parameter
was required, the optimum parameter being the
standard deviation of the vertical component of the wind
velocity. This parameter is shown plotted against the
HQR ratings awarded by the three pilots in Figure 9.
Also shown on the plot is the best fit line that is given by
the following relationship:
HQR = 2.77 + 1.571*(std. devn. of vertical velocity)
Applying this relationship to the wind tunnel data for the
Brae A yields the workload predictions illustrated in
Figure 10. The workload ratings are placed on a
compass rose where the bearing represents the wind
direction and the distance from the centre of the rose
represents the wind speed. The arc of the coloured
segment represents the angle projected by the width of
the obstruction.
Figure 10 - Workload predictions for Brae A using
the turbulence /workload relationship established
from piloted simulation trials.
Using this value and combining it with the identified
relationship for workload rating as a function of the
9
Comparison of Figure 10 with the entry for the Brae A in
the Helicopter Limitations List (HLL) has indicated that
the results of applying the relationship between
turbulence level and pilot workload to the wind tunnel
data for the Brae A are broadly consistent with current
operational experience.
Ongoing Work
The research described above has been fully reported in
CAA Paper 2004/3 [22]. Although considered highly
successful, the research to develop the turbulence
criterion necessarily embraced a number of assumptions
and approximations and, as is normally the case with
work of this nature, there is a need to validate both the
modelling process used, and the limiting criterion
established prior to incorporation of the criterion in the
guidance [23].
Figure 11 - Super Puma helicopter tipped over on
the West Navion drillship.
The approach adopted for this task has been to
implement the collective and cyclic control movementbased pilot workload algorithms in the Helicopter
Operations Monitoring Programme (HOMP) [24] analysis
software, and use archived HOMP data to map the
environments around offshore helidecks and compare
the results with helicopter operational experience as
documented in the HLL.
This accident again focused attention on the wave
motion limits applied to helidecks on ships and floating
platforms. The setting of these limits should involve
consideration of two aspects; motion limits for executing
a safe landing, and limits for safely remaining on the
deck for the period necessary to effect passenger and
cargo transfer (usually not more than 10 minutes).
The first phase of this work, entailing the adaption of the
technique to HOMP flight data records, has been
successfully completed. As at June 2005, the resulting
analysis is being applied to approximately one year’s
worth of archived HOMP data, comprising around
20,000 approaches to 50 different platforms.
The former is relatively easy to judge visually. The pilot
can see the movements of the ship, judge whether it is
safe to make the landing and can choose the
appropriate moment to set the helicopter down. The
latter is much more difficult because it should involve a
prediction of the helideck motions over the next 10
minutes while the helicopter will be on the helideck, and
an assessment of the statistical risk of unsafe motions.
Furthermore, there is little that the pilot can do in the
event of excessive motion building up whilst on the
helideck.
An attractive ‘spin-off’ from this exercise is a means of
continuously monitoring the environments around all
offshore platforms if the HOMP-based approach is
successful.
Up until now the motion limits have normally been
specified in terms of a maximum pitch, roll and heave
amplitude, but it is clear from the physics of the situation
that it is the helideck accelerations that will cause a
helicopter to slide or topple over. This is further
complicated by the fact that a commercial helicopter with
its rotor turning will be generating significant lift. Even
with the collective at its lowest setting, as would normally
be the case on the helideck, it is likely that about 30% of
the weight of the helicopter is being carried in rotor lift
with wind speeds of only 20 - 25 kts, and wind gusts will
also have a major effect.
Operations to Moving Helidecks
On the UK continental shelf there have been a number
of helicopter accidents and incidents on ship helidecks
caused by excessive wave motions. The most recent
(see Figure 11) occurred in November 2001 on the West
Navion drillship west of Shetland, and is believed to
have been caused by a failure in the ship’s dynamic
positioning heading control. This caused the vessel to
turn out of the wave/wind heading, resulting in a marked
increase in helideck motion and a shift in the direction of
the wind relative to the helicopter. The helicopter that
was on the deck awaiting passenger embarkation was
tipped over, resulting in serious injury to the co-pilot who
was outside of the aircraft conducting his ‘walk-round’
checks at the time.
A program of research [25] has been carried out to
devise and validate a new Motion Severity Index (MSI).
The aspect of the helideck motion that will cause the
helicopter to slide or topple is simply the ratio of the
horizontal and vertical accelerations:
10
I s ( X tt Ytt )1/ 2 / Z tt
and changes in mean wind direction are to be addressed
by the deck status scheme described below.
where:
Refinement of the overall scheme is in progress to add
the concept of deck status to control on-deck handling
procedures, and thereby address scenarios like the
West Navion accident where changes in the vessel’s
heading to the wind and/or waves occur after landing.
Green status will equate to normal deck handling
procedures and will be in force when the least stable
aircraft is calculated to remain within limits regardless of
post landing vessel or wind heading changes. By
definition, any helicopter type will be able to land on any
deck at green status. Amber status will apply when the
deck is within limits for the most stable helicopter, but
when a high risk of exceeding operating limits would
exist in the event of a vessel or wind heading change
after landing. Revised deck handling procedures will be
employed for amber status to reduce the risk of a tip or
slide, and to maximise the opportunity for the helicopter
to lift off in the event of problems developing. It is
possible that a deck at amber status may be out of limits
for less stable helicopters having lower operating limits.
Red status applies when the deck is out of limits for all
helicopter types, and the helideck is consequently
closed. A risk assessment is to be conducted to ensure
that the green/amber and amber/red boundaries are set
such that the overall safety level is acceptable.
2
2
X tt resultant surge acceleration parallel to the deck
Ytt resultant sway acceleration parallel to the deck
Z tt heave acceleration perpendicular to the deck
The MSI is a statistical prediction of a maximum value of
the motion severity that will be experienced during the
period the helicopter remains on the helideck, and can
be expressed as:
MSI 2{2.Ln( N / )}1/ 2 .mo
1/ 2
where:
N number of response cycles in the 10 minute time
history (approximately 600/Tp, where Tp is the mean
period).
an assigned probability of exceedance.
mo
1/ 2
the root mean square of the signal I s .
It is intended that a standard accelerometer package will
be mounted under the helideck to directly measure the
accelerations. The rms value of Is, and hence the MSI,
will be calculated from the acceleration data over the 10
minute period prior to the helicopter arrival on a
continuous basis. A standard value of for use in the
formula is to be established from a risk analysis.
The main outstanding work stream for the project has
been the validation of the computer model developed to
establish helicopter limits of operability (in terms of the
MSI and WSI). Field trials provided a degree of
validation but insufficient confidence existed in the
modelling of the aerodynamic effects, particularly at
higher wind speeds when they become very significant
and where experimental data is difficult to obtain safely.
The recently completed analysis of full scale Sikorsky S76 rotor loads data from wind tunnel tests performed by
NASA Ames [26], however, has resolved these
difficulties and preliminary helicopter operating limits
should be available for the S-76 and the Eurocopter
Super Puma by autumn 2005.
The single MSI number will be transmitted to the
helicopter pilot, who will compare it with the limiting
values established for his helicopter type and contained
in the Company Operations Manual. The limiting values
were originally expected to be dependent only on wind
speed. Analysis of data from the West Navion accident
and studies using the computer model developed for
determining the limiting values of the MSI for individual
helicopter types, however, have led to the replacement
of wind speed as a controlling parameter in the
individual helicopter operating limits with a wind severity
index (WSI). The WSI is to be generated by the same
motion sensing system that calculates the MSI using
anemometer data provided via an industry standard
interface. The WSI takes account of mean wind speed
changes during the subsequent 10 minute period, and is
calculated in a similar fashion to the MSI, i.e. a 10minute moving window of wind data is analysed to
produce the statistically most likely maximum value for
the subsequent 10-minute period while the helicopter will
be on the helideck. The effects of wind gusting are to be
accounted for in setting the helicopter operating limits,
It is expected that the MSI and WSI values will be simple
to transmit, with less risk of confusion than has been the
case in the past with pitch, roll and heave motion values.
The standard instrumentation and analysis to provide
the MSI and WSI will also remove the current variability
and uncertainty in the quality of the pitch, roll and heave
estimates. More significantly, the MSI, WSI and
associated helicopter operating limits will directly relate
to the risk of the helicopter sliding or tipping on the deck,
will be independent of the location of the helideck on the
vessel and the vessel type (motion characteristics), and
will address the period during which the helicopter is on
the deck and exposed to the risk.
11
Helideck Lighting
The UK CAA has, for a number of years, been seeking
to improve the performance of lighting schemes on
offshore helidecks. Current systems suffer from three
main problems:
the location of the helideck on the platform is
difficult to establish due to the lack of conspicuity
of the perimeter lights - the yellow perimeter lights
blend in with the yellow light from the sodium
floodlights widely used for general platform
lighting;
helideck floodlighting systems are frequently a
source of glare and loss of pilots’ night vision on
the deck, and further reduce the conspicuity of the
helideck perimeter lights during the approach;
the performance of most helideck floodlighting
systems in illuminating the central landing area is
inadequate, leading to a lack of visual cues and
the so-called ‘black hole’ effect.
Starting in 1995, a number of experimental lighting
schemes were evaluated during a series of onshore and
offshore flight trials, culminating in three dedicated trials
at the NAM K14B satellite in the southern North Sea.
During these trials, a number of changes to the current
standard helideck lighting were evaluated. These
included;
Key
Green Perimeter Light
Yellow Perimeter Light
Yellow LED Strip (1.5m/ 1m)
Hatch
White Floodlight
Fire Extinguisher
Green ELP (1m / 0.5m)
Loudspeaker/ Bird Scarer
changing the colour of the standard perimeter
lights from yellow to green;
using green electro luminescent panel (ELP)
lighting in lieu of the standard perimeter lighting;
adding hoods to the floodlights;
turning the floodlights off;
illuminating the ‘H’ in the centre of the landing
area with green ELP;
illuminating the inner and outer edges of the
landing circle with yellow light-emitting diode
(LED) strips.
Green LED Strip (1m)
Stairs
Figure 12 - Experimental lighting equipment
locations trialled on the K14B platform [27].
The overall conclusions of this work were that:
The layout of this equipment on the trials helideck is
illustrated in Figure 12.
These changes were applied in a number of
combinations, and the relative benefits were assessed
by means of questionnaires that were completed at the
end of each approach by the trials pilots while the next
lighting configuration was being set up. Ratings for
presentation and workload were awarded by the pilots
on a ten-point scale. Each of the three trials commenced
with an approach to the standard lighting configuration
(yellow perimeter lights and floodlights without hoods),
which was pre-allocated mid-scale workload and
presentation ratings of five in order to ‘calibrate’ the
pilots.
changing the colour of the perimeter lights from
yellow to green greatly increased the conspicuity
of the helideck and extended the acquisition
range;
illuminating the ‘H’ in the centre of the helideck
with green ELPs significantly enhanced the visual
cueing environment during the final approach;
illuminating the inner and outer edges of the
landing circle with yellow light-emitting diode
(LED) strips significantly enhanced the visual
cueing environment from the final approach
through to touchdown;
the floodlights, with or without hoods, degraded
the conspicuity of the helideck during acquisition
and were a source of dazzle to the pilots while the
helicopter was on the deck.
As a result of these trials, the currently recommended
lighting configuration for providing a significantly
enhanced visual cueing environment is; green
12
incandescent perimeter lights, yellow LED strips
illuminating the inner and outer edges of the landing
circle, green luminescent illuminated ‘H’, and no
floodlights. A photograph of this configuration taken
during the trials is given in Figure 13. The final report on
the NAM K14 trials has now been published [27].
obtain the information required to characterise the
landing circle and ‘H’ lighting, to evaluate the suitability
of a number of current products and try out some new
ideas. A total of five trials were completed and the
‘highlights’ included:
Figure 13 – Photograph of preferred lighting
configuration as determined by the trials undertaken
on the K14B platform [27].
The preferred configuration from the K14B trials was
installed at Longside airfield near Aberdeen, UK, for
further experimentation. The main aims of these trials
were to evaluate a single lit landing circle (as opposed to
a double circle), an outline ‘H’ (instead of a solid ‘H’),
and the effect of a helideck net on the various lighting
configurations. Two trials were completed during 2002,
one without a helideck net installed and one with. The
overall conclusions of these trials were:
Without a net, a single ring of yellow LED strips
around the landing circle was found to be adequate,
and it was judged that this should be located midway between the inner and outer edges of the
yellow painted marking.
Without a net, an outline ELP ‘H’ was found to be
better than the solid version.
With a net fitted, there was a greater preference for
two rings of yellow LED strips than was the case
without the net.
With a net fitted, the solid 'H' was much better than
the outline version.
A minimum acceptable baseline for the yellow
LED landing circle has been established in terms
of coverage (length of LED strips vs. length of
gaps), LED density and LED intensity.
An effective interim floodlighting configuration,
comprising two high-mounted halogen floods at
the Limited Obstacle Sector (LOS) with two deck
level xenon floods on the opposite edge of the
deck, has been identified.
Green perimeter lights meeting the revised
vertical intensity distribution have been evaluated
and were favourably received by the trials pilots.
No adverse effects of the increased intensity were
noted.
An LED Obstacle Free Sector (OFS) chevron
marker has been evaluated and found to be
useful, but only during the very final stages of the
approach and landing. The cueing provided was
not considered to match that provided by the ELP
‘H’.
An outline ‘H’ formed using laser driven optical
fibre has been trialled and found to perform much
better than the existing ELP ‘H’; this technology is
more affordable, more robust and the on-deck
hardware is completely inert.
The effect of rain on the cockpit windows has
been evaluated and found to be insignificant if not
non-existent.
The effect of vertical approach profile on the
range of the LED circle has been investigated and
useful results obtained.
The application of laser driven optical fibre to
illuminate the helideck net has been trialled, but
the result was considered to be too artificial or
synthetic by the pilots.
The effects of a helideck net on the key lighting
configurations have been evaluated, and no
significant problems were encountered.
A specification for the illuminated landing circle and ‘H’
marking (in lieu of floodlighting) for the recommended
lighting configuration has been produced and will be
tendered with a view to producing prototype equipment
for installation on an offshore platform for an extended
in-service trial. The purpose of these trials will be to
expose the lighting to a larger number of pilots, and to
evaluate the lighting in a broader range of
meteorological conditions.
The final report on these trials has been completed and
has been published in CAA Paper 2005/01 [28].
A new test bed was then installed at Norwich Airport to
continue the trials work started at Longside airfield. The
overall objective of this series of trials was to further
improve and refine the revised helideck lighting system,
Changes to the Annex 14 Volume 2 material have been
accepted at ICAO. Guidance material has been
13
produced for the recommended interim lighting scheme
(changing the colour of the perimeter lights to green and
replacing the deck level floodlights with the new
improved configuration), and formally issued to the UK
Industry pending update of CAP 437 [23]. A number of
helidecks in the UK sector of the North Sea have already
installed the new green perimeter lighting.
to ICAO Annex 6 Part III as a Recommended Practice
for flight data recorder-equipped helicopters.
Low Airspeed Measurement
An aspect of flight operations monitoring unique to
helicopters is the need for a measure of low airspeed in
order to fully monitor the operation of the aircraft during
the more demanding flight phases of take-off and
landing. The pitot-static systems with which helicopters
are equipped become increasingly inaccurate with
reducing airspeed, primarily due to the influence of the
main rotor wake, and effectively cease to function below
a threshold airspeed of 20 to 50 knots (depending on
helicopter type), and in sideways or rearwards flight.
Helicopter Flight Data Monitoring - Extension to Low
Airspeed Regime
Background
Flight operations monitoring (FDM) is a mature and wellestablished practice among a number of UK commercial
airlines (e.g. British Airways, Britannia Airways and
British Midland), with widely acknowledged safety
benefits. In essence, it comprises the routine analysis of
aircraft flight data to monitor compliance with defined
operational criteria using a specialised computer
program. The operational criteria include the
corresponding aircraft flight manual limitations, safe
margins around the operational interpretation of the flight
manual, and definitions of the good practice and
airmanship that pilot training programmes seek to instill.
Where comparison of the actual operation of the aircraft
with the defined criteria reveals reduced margins or noncompliances, appropriate action is taken within the
airline to improve unsatisfactory practices. As this
process is continuous, the effectiveness of any
corrective action taken is automatically monitored.
Specialised mechanically based sensors do exist for
providing enhanced low airspeed information, but these
suffer from a number of disadvantages (e.g. cost,
maintenance and calibration overhead) which effectively
render them inappropriate for a flight data monitoring
programme. Alternative algorithmic-based solutions
have been developed and trialled with varying degrees
of success, but most require input parameters that are
not currently available and are difficult/expensive to
provide on helicopter flight data recording systems (e.g.
AUM, cg location, servo positions).
A potential alternative non-mechanical approach to
synthesising low airspeed utilising only existing flight
data parameters is to employ an Artificial Neural
Network (ANN). Earlier work performed by Warwick
University and Westland Helicopters Ltd in the UK, has
demonstrated the potential of ANNs to predict low
airspeed (and direction). An accuracy level of 4 knots
(95%) was obtained when the technique was applied to
Lynx and EH101 flight data that had been collected
during low speed handling and performance trials.
An in-service trial of the application of FDM to
helicopters, known as the Helicopter Operations
Monitoring Programme (HOMP), involving five Bristow
Helicopters Super Puma aircraft was commissioned in
2000 and was funded by UK CAA and Shell Aircraft
Limited. The trial was concluded at the end of August
2001 and the final project report published as CAA
Paper 2002/02 [29]. The trial was very successful and
the Industry decided to proceed with full implementation
of helicopter FDM on the North Sea fleet in advance of
any regulatory action.
Current Research
Following a competitive tendering process, work on
developing an ANN based measure of helicopter low
airspeed specifically for helicopter FDM programmes
was launched at the end of January 2000 at Westland
Helicopters Ltd. The first phase of this work entailed the
use of an existing set of flight data recorder (FDR)
records from 800 Super Puma flight sectors to train an
ANN. The flight data comprised the normal FDR
parameters, together with a measure of low airspeed
provided by a hardware-based sensor. The sensor used
was a gimbal-mounted pitot-static system known as
HADS or LASSIE. Of the 25 analogue parameters
available, the 20 detailed in the Table 1 were selected to
train the ANN on the basis of their links to the prediction
of airspeed established from other analytical methods.
CAA continued to promote helicopter FDM by funding its
extension to a second helicopter type (Sikorsky S76)
and to a second offshore helicopter operator (CHC
Scotia) in conjunction with the Industry-led full-scale
implementation plan. These trials demonstrated the
successful transfer of the safety benefits of helicopter
FDM, and usefully identified significant differences
between operators and between helicopter types. This
work was reported in CAA Paper 2004/12 [30].
The ICAO Helicopter Tiltrotor Study Group (HTSG) was
also impressed by the research and, in 2004,
unanimously agreed to propose to add helicopter FDM
14
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Parameter
Pressure Altitude
Collective Pitch
Lateral Cyclic Pitch
Fore/aft Cyclic Pitch
Yaw Rate
Indicated Airspeed
Lateral Acceleration
Fore/aft Acceleration
Normal Acceleration
Outside Air Temp.
Pitch Attitude
Radio Altitude
Roll Attitude
Main Rotor rpm
Tail Rotor Pitch
Mean Eng. Torque
Rate of climb
Pitch Rate
Roll Rate
Mass
Units
feet
deg
%
%
deg
Kts
g
g
g
celsius
deg
feet
deg
rpm/10
deg
Nm
feet/s
deg/s
deg/s
lb
using the Super Puma FDR data. In order to simplify the
problem, two MLPs were trained and tested. One was
trained to predict longitudinal airspeed, and the second
was trained to predict lateral airspeed. The training
procedure comprised the following three stages:
The pre-processing applied entailed modifying the input
parameters so that their mean values were all zero, and
their standard deviations were all unity. The network
weights and bias units were generated using the
Nguyen-Widrow [31] method to ensure that the active
region of the layer’s neurons would be roughly evenly
distributed over the input space. A comparison of the
Levenberg-Marquardt [32] and Bayesian Regularisation
[33] training algorithms was performed, and the latter
selected as it was found to produce an MLP with
significantly better generalisation. The performance of
the longitudinal and lateral airspeed MLPs in training
and testing is given in the Table 2.
Table 1 - ANN input parameters.
Three different types of ANN architecture were
evaluated for the project: linear; multi-layer perceptron
(MLP); radial basis function (RBF). All three were
applied to the task of predicting longitudinal airspeed of
an EH101 helicopter. The linear network achieved an
accuracy of 9 Kts, and was significantly out-performed
by the MLP and RBF versions which achieved
accuracies of 4.3 Kts and 4.9 Kts respectively. The
MLP architecture was judged superior to the RBF
because of its greater simplicity and slightly better
performance. A schematic of the basic MLP architecture
is given in Figure 14.
Input
Layer
Hidden
Layer
Pre-process data.
Initialise network weights and bias units.
Train network.
MLP/Error
Longitudinal Airspeed Predictor
Lateral Airspeed Predictor
95% Error Deviation (Kts)
Training
Test
±3.6
±11.2
±2.5
±5.4
Table 2 - Initial ANN performance.
A sensitivity analysis was performed on the MLPs to
attempt to identify the cause of the poorer than expected
performance on the test data. In the case of the
longitudinal airspeed MLP, collective pitch and radio
altitude were found to be two of the key parameters
which suggested that the MLP had learnt the flight
profile rather than the relationship between the
helicopter’s controls, state and airspeed. Radio altitude
was also a key input for the lateral airspeed MLP, but to
a lesser extent. Reference to the earlier Lynx and
EH101 research indicated that, although collective pitch
and radio altitude were significant factors, their
contribution to the accuracy of the ANN was relatively
small compared to fore/aft and lateral cyclic pitch.
Collective pitch and radio altitude were therefore
removed from the training data set and the MLPs retrained and re-tested with the following results.
MLP/Error
Longitudinal Airspeed Predictor
Lateral Airspeed Predictor
Output
Layer
Figure 14 - Schematic of a MLP with a single hidden
layer; bias units are omitted.
95% Error Deviation (Kts)
Re-training
Re-test
±4.6
±9.9
±2.6
±4.7
Table 3 - ANN performance following re-training.
Although the results show an improvement, the
performance was still disappointing. Further efforts to
improve the performance of the MLPs were
Having selected the ANN architecture and the input
parameters, the next step was to train and test the ANN
15
unsuccessful, and attention eventually focused on the
training data. Investigations then revealed that the
calibration accuracy of the HADS used to provide the
‘truth’ reference to be ±8Kts.
determine whether any of them were unacceptable.
The generic form of the offshore approach is shown in
Figures 15 and 16.
A key feature of offshore approaches is the absence of a
fixed final approach track; the approach is normally
flown substantially into wind. Allowing the approach to
be up to 10 out of wind would still result in 18
approaches per oil rig and there are 300+ rigs in the
North Sea. Programming all of these into the navigation
data base would clearly be impractical and, because
manual entry of approach waypoints is not permitted
(established pilot data entry error rates are too high for
this critical flight phase) it is not possible to operate the
GPS in approach mode.
A second phase was therefore been added to the
programme to conduct a flight trials programme to
generate a more accurate training data set, repeat the
Phase 1 exercise, and produce a module for
incorporation into the helicopter FDM analysis software.
All preparation work for the trials has been completed
and the conduct of the trials presently awaits a suitable
weather window.
Use of GPS for Offshore Helicopter Operations - Low
Visibility Approaches
The best that can therefore be achieved is to operate the
GPS in terminal mode, giving a full scale (2 dots) course
deviation indicator (CDI) deflection of 1 NM and RAIM
alarm limit of 1 NM. This is clearly inadequate for use
with an offset initiation point (OIP) and a missed
approach point (MAPt) at 1.5 NM and 0.75 NM
respectively from the destination. It was therefore
determined that the use of GPS be essentially restricted
to providing an independent cross-check of the weather
radar.
Background
Low visibility approaches to offshore platforms are
currently based on the use of weather radar for
navigation and as a means of detecting obstacles on the
approach path. Although it has been used for this
purpose for a number of years, weather radar is neither
designed nor certificated for such operations. In addition,
these operations were identified by the Human Factors
Working Group [2] as an area of potential safety
improvement. Consequently, UK CAA has been
investigating alternative means of conducting these
operations. These investigations have focussed on the
use of GPS, and have included a series of trials
activities and follow-on data analysis exercises which
have been reported in CAA Papers 2000/5, 2003/2 and
2003/7 [34, 35, 36]. UK CAA believes that the results of
these investigations have demonstrated GPS to have
significant potential for use as an offshore approach aid.
This is achieved by entering the destination as a
waypoint and then using the GPS range and bearing
information to check the position of the target on the
weather radar display, i.e. using GPS as a psuedo
VOR/DME station located at the destination. The
proposed procedure comprises the following steps:
Selection from the area navigation system database
(fixed installations) or manual entry (mobile
installations) of the destination.
Manual entry of the IW (a GPS waypoint 5 NM
downwind of the destination, i.e. half way between
the intermediate fix (IF) and the final approach fix
(FAF)) as a range and bearing from the destination.
Operation of the GPS equipment in terminal mode.
Comparison of weather radar and GPS range and
bearing data to assist identification of the
destination.
Use of GPS guidance (via the CDI) to guide the
aircraft towards the FAF.
Use of GPS guidance (via the CDI) from the IW
towards the OIP, using the CDI to establish the
helicopter on the correct approach track and hence
heading.
Transition from GPS guidance to navigation on
headings once the track is stabilised and before
reaching 2.5 NM range from the destination. (NB:
This represents a convenient and well defined
point, because it is where the crew usually change
scale on the weather radar.)
Following on from this work, a hazard analysis of the use
of GPS for helicopter offshore approaches is being
conducted. This exercise has been split into two parts;
the first deals with the use of existing North Sea
helicopter GPS equipment to enhance the existing
weather radar approaches; the second will focus on a
GPS-based offshore approach for which new aircraft
equipment will be required.
GPS-Assisted Weather Radar Approaches
The objective of this part of the study was to determine
whether and how existing North Sea helicopter GPS
equipment fits could be employed to improve the safety
of the current airborne radar approach (ARA)
procedures. The methodology employed was to:
establish whether and how GPS could be used to
mitigate the hazards associated with ARAs, and
analyse the hazards associated with the defined
GPS-assisted offshore approach procedure to
16
100
OIP
IAF
FAF
IF
MAPt
Destination
Figure 15 - ARA approach procedure (horizontal).
IAF
MAPt
OIP
FAF
IF
=>1500ft
=>1000ft
0
1
2
3
4
5
6 NM
Figure 16 - ARA approach procedure (vertical profile).
Use of GPS range and bearing to the destination
during the first segment of the final approach (IW to
OIP) to cross-check weather radar information (for
correct ‘painting’ of destination and, hence, other
obstacles).
Use of GPS range to the destination to enhance
confidence in the weather radar determination of
arrival at the OIP and MAPt.
Use of GPS range and bearing to the destination to
monitor separation from the destination.
performed, however, to ensure that the use of GPS did
not add any unacceptable hazards. The study employed
the probability, severity and risk matrix criteria of JAA
AMJ 25.1309. The table below summarises the results
of this study which indicated no unacceptable risks.
This procedure has been evaluated in simulator trials by
two of the major North Sea helicopter operators and
judged appropriate. For cross checking of range and
bearing between the weather radar and GPS, analysis of
the errors indicates a maximum expected discrepancy of
600m in range and 13 in bearing (at 4NM where the
main check is to be performed). As a result of feedback
from the simulator trials these figures were altered to the
more conservative values of 550m (0.3 NM) and 10
respectively, to simplify the task.
The benefits of this procedure are; assisting the
identification of the destination; providing CDI guidance
for establishment on the correct track (and therefore
heading); and for cross checking the weather radar for
gross errors. A hazard analysis of the procedure was
Initial cause of deviation
Helicopter
tries to land
on unsafe rig
Conflict with
another
helicopter
Incorrect flight crew waypoint
selection/ IW entry/database
checking causes deviation
from intended path
TOLERABLE
TOLERABLE
Incorrect flight crew waypoint
entry causes deviation from
intended path
TOLERABLE
TOLERABLE
Incorrect aeronautical data
causes deviation from
intended path
TOLERABLE
TOLERABLE
Incorrect position estimation
causes the deviation from the
correct approach path
TOLERABLE
TOLERABLE
Table 4 - Hazards and risk tolerability.
17
Note that any hazards related specifically to the weather
radar, such as failure to detect obstacles, are not
included in the analysis as they are not a consequence
of the use of GPS.
the UK Continental Shelf, the results can clearly be
applied to helicopter-based offshore oil and gas support
operations anywhere in the world. Operating arenas
where weather conditions are similar to those
experienced around the UK for a significant proportion of
the year, and/or where cessation of operations in bad
weather is either undesirable or untenable may
especially benefit from the application of the results of
this work.
GPS Approaches
This section of the study will commence with a safety
assessment of existing weather radar approaches to
identify the weaknesses that a full GPS approach will
need to address. The aircraft hardware and an
associated operating procedure will then be formulated
and subjected to a hazard analysis.
Acknowledgements
In addition to the hazard analysis, a European Union
research initiative led by INNECO of Spain includes
optional work on the North Sea helicopter application of
GPS. The option presently comprises a data collection
exercise to establish suitability of the European
Geostationary Navigation Overlay Service (EGNOS) to
provide the wide area differential corrections that are
expected to be required, and simulator trials (at
Eurocopter) for pilot evaluation of the approach
procedures.
The author would like to recognise the good work of the
engineers and scientists at CAA’s research contractors
who performed, and/or are performing, the research
described in this paper. They are: BMT Fluid Mechanics,
QinetiQ (Bedford), Atkins Process (Bristol and Epsom),
Glasgow Caledonian University, Smiths Aerospace
Electronic
Systems
Southampton,
Westland
Helicopters, Helios Technology and RGIT Montrose.
References
Following successful completion of the current work, full
in-service trials of the DGPS based approach guidance
system and procedures will be required to validate the
system and procedure design prior to implementation.
This will involve the development and installation of
prototype equipment on a limited number of helicopters
for evaluation. The evaluation will include the recording
and analysis of system technical performance data, and
the collection and analysis of flight crew feedback via
questionnaires.
[1] Helicopter Airworthiness Review Panel (HARP) of
the Airworthiness Requirements Board, Review of
helicopter airworthiness, CAP 491, CAA, London,
June 1984
[2] Report of the Helicopter Human Factors Working
Group, CAA Paper 87007, CAA, London, 1987.
[3] Report on the Review of Helicopter Offshore Safety
and Survival (“RHOSS”), CAP 641, CAA, London,
February 1995.
[4] Intelligent Management of HUMS Data, CAA Paper
99006, CAA, London, September 1999.
[5] Laspalles, P.J. Rowe, S.J., Wave Height
Probabilities on Helicopter Routes, BMT Fluid
Mechanics Report 44140r13, July 1997.
[6] FAA, Advisory Circular AC29-2C
relating
to
JAR/FAR 29.801 Ditching 30th September 1999.
[7] Helicopter Float Scoops, CAA Paper 95010, CAA,
London, December 1995.
[8] Devices to Prevent Helicopter Total Inversion
Following a Ditching, CAA Paper 97010, CAA,
London, December 1997.
[9] Helicopter Ditching Research – Egress from SideFloating Helicopters, CAA Paper 2001/10, CAA,
London, September 2001.
[10] Westland Helicopters Limited, A review of UK
military and world civil helicopter water impacts over
the period 1971-1992, Stress Department report no.
SDR 146, November 1993, published in CAA Paper
96005, CAA, London, July 1996.
[11] Westland Helicopters Limited, An analysis of the
response of helicopter structures to water impact,
Stress Department report no. SDR 156, March
Conclusions
It has been the purpose of this paper to provide a brief
overview of the origins of the UK CAA-led helicopter
safety research programme, and to summarise current
activities on the seven main ‘live’ research projects. The
research programme has already led directly to
significant progress being made in addressing a number
of key safety issues. In particular; with regard to
airworthiness, all UK North Sea offshore helicopters are
fitted with HUMS; concerning operational matters,
helicopter FDM either has been or is being implemented
by all UK and Norwegian offshore helicopter operators.
The current research on both of these initiatives is aimed
at further enhancing their effectiveness. In addition, work
on a number of the other significant safety initiatives
covered in this paper is nearing completion and it is
hoped that the results and lessons learned can be
implemented in the near future.
Although the work has been primarily aimed at
improving levels of safety for helicopter operations on
18
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
1995, published in CAA Paper 96005, CAA,
London, July 1996.
Federal Aviation Administration, Survey and
analysis of rotorcraft flotation systems, US
Department of Transportation, Office of Aviation
Research, report no. DOT/FAA/AR-95/53, 1996.
Federal Aviation Administration, Rotorcraft ditchings
and water related impacts that occurred from 1982
to 1989 - phase I, US Department of Transportation,
Federal Aviation Administration Technical Center
report no. DOT/FAA/CT-92/13, 1993.
Federal Aviation Administration, Rotorcraft ditchings
and water related impacts that occurred from 1982
to 1989 - phase II, US Department of
Transportation, Federal Aviation Administration
Technical Center report no. DOT/FAA/CT-92/14,
1993.
Crashworthiness of Helicopter Emergency Flotation
Systems, CAA Paper 2001/02 (Part 1), CAA,
London, September 2001.
Crashworthiness of Helicopter Emergency Flotation
Systems, CAA Paper 2001/02 (Part 2), CAA,
London, September 2001.
Summary Report on Helicopter Ditching and
Crashworthiness Research, CAA Paper 2005/06,
CAA, London, 2005.
Heavy Landing on Claymore Accommodation
Platform, UK AAIB Bulletin No. 3/96, 18 August
1995.
Research on Offshore Helideck Environmental
Issues, CAA Paper 99004, London, August 2000.
A questionnaire survey of workload and safety
hazards associated with North Sea and Irish Sea
helicopter operations, CAA Paper 97009, CAA,
London, June 1997.
Cooper G E, Harper R P, The Use of Pilot Rating in
the Evaluation of Aircraft Handling Qualities, Report
No.NASA-TN-D-5153, April 1969.
Helicopter Turbulence Criteria for Operations to
Offshore Platforms, CAA Paper 2004/03, CAA,
London, September 2004.
Offshore helicopter landing areas - guidance on
standards, CAP 437, Third edition, CAA, London,
October 1998.
Larder, B. D., Final Report on the Helicopter
Operations Monitoring Programme (HOMP) Trial,
CAA Paper 2002/02, CAA, London, September
2002.
Gallagher, P., Helicopter Operations to Moving
Decks, Proceedings of Conference, “Helicopter
Operations in the Maritime Environment”, Royal
Aeronautical Society, London, March 2001.
Shinoda, P.M and Johnson, W., Performance
Results from a Test of an S-76 Rotor in the NASA
Ames 80- by 120-Foot Wind Tunnel, AIAA 11th
Applied Aerodynamics Conference, Monterey, CA,
August 1993. AIAA-93-3414.
[27] Enhancing Offshore Helideck Lighting – NAM K14
Trials, CAA Paper 2004/01, CAA, London, January
2004.
[28] Enhancing Offshore Helideck Lighting – Onshore
Trials at Longside Airfield, CAA Paper 2005/01,
CAA, London, April 2005.
[29] Final Report on the Helicopter Operations
Monitoring Programme (HOMP) Trial, CAA Paper
2002/02, CAA, London, September 2002.
[30] Final Report on the Follow-On Activities to the
HOMP Trial, CAA Paper 2004/12, CAA, London,
October 2004.
[31] Nguyen, D. and Widrow, B., Improving the learning
speed of 2-layer neural networks by choosing initial
values of the adaptive weights, Proceedings of the
International Joint Conference on Neural Networks,
vol.3, July 1990, pp. 21-26.
[32] Hagan, M.T. and Menhaj, M., Training feedforward
networks with the Marquardt algorithm, IEEE
Transactions on Neural Networks, vol.5, no.6, 1994,
pp. 989-993.
[33] Foresee, F.D. and Hagan, M.T., Gauss-Newton
approximation to Bayesian Learning, Proceedings
of the 1997 International Joint Conference on
Neural Networks, 1997, pp. 1930-35.
[34] DGPS Guidance for Helicopter Approaches to
Offshore Platforms, CAA Paper 2000/05, CAA,
London, November 2000.
[35] DGPS Guidance for Helicopter Approaches to
Offshore Platforms - Follow On Studies, CAA Paper
2003/02, CAA, London, June 2003.
[36] Effect of Helicopter Rotors on GPS Reception, CAA
Paper 2003/07, CAA, London, December 2003.
19