here - GSI
advertisement

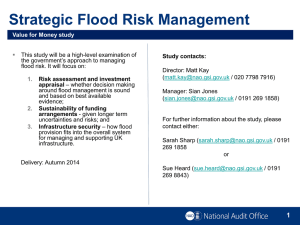
Control System for Cancer Therapy with a Heavy Ion Beam at GSI E. Badura, H. Brand, H. G. Essel, Th. Haberer, H. Hardel, J. Hoffmann, N. Kurz, P. Liebold, W. Ott, K. Poppensieker, M. Richter Gesellschaft fuer Schwerionenforschung mbH, GSI Planckstr. 1, D-64291 Darmstadt, Germany Abstract A system of three dimensional raster scanning of carbon beam used for cancer therapy has been designed and built at GSI and is in operation since December, 1997. The following components are presented: 1. The front-end real-time system, based on VME boards with DSPs designed and built at GSI. In treatment mode, the beam is steered and controlled automatically according to the patient's treatment plan. 2. The on-line monitoring system. During the treatment all data measured by the front-ends is sent via a separate bus to a memory located in a second VME crate. A data server in this crate sends the data as it arrives via TCP to the therapy on-line monitor program, TOM, which displays the treatment process in nearly real-time. 3. The data acquisition and analysis system. In experimental mode the same system is used for quality control and calibration of the beam before the treatment. The measured beam positions and shapes are sent through the same data channel to an analysis package developed at GSI. I. INTRODUCTION The project of an experimental cancer therapy with heavy ions has been realized at GSI in cooperation with the Deutsches Krebsforschungszentrum, DKFZ, the Ruprecht-Karls-Universität Heidelberg, and the Forschungszentrum Rossendorf, FZR. Since 1997, 32 patients have been treated with a 12C beam. No negative side effects have been observed so far. The tumor reaction was positive. The project is divided in several subprojects: 1. The Radiological Clinic of the University of Heidelberg conducts all aspects of the clinical studies from the patient selection to the follow-up. The medical treatment planning is done at the DKFZ using computer tomography [1]. 2. The calculation of the machine parameters of the radiation plan is done at GSI [2]. 3. The accelerator at GSI had to be upgraded to achieve the required stability and accuracy. A spill library (MEFI) of 253 energies, 7 foci and 15 intensities has been implemented [3]. 4. The medical operating system (slow control) has been implemented at GSI using FactoryLink (US DATA) as GUI and a class library from CERN running in the front-end system [4}. 5. A sophisticated safety system has been implemented at GSI [5]. 6. A positron emission tomography system, PET, has been developed at FZR. It allows for the measurement of the actual dose distribution immediately after the treatment [6]. 7. The kernel steering system executing and controlling the treatment automatically has been designed and built at GSI. 8. The on-line monitoring and data analysis package has been developed at GSI. Figure 1 shows the raster scan principle [7]. The beam energy defines the depth of the Bragg peak, and each energy plane is scanned by two steering magnets. The intensity controlled movement of the beam is not smooth, but rather point by point thus allowing precise position measurement. The beam spots overlap to achieve a homogeneous irradiation. Figure 1: The Scanning Principle. In the following, the steering and control system, the monitoring, and the data analysis are described in more detail II. STEERING SYSTEM A. Hardware Modules The following modules, devices, and detectors have been designed and built at GSI: 1. Multi wire proportional chambers (MWPC): 112x112 wires, 2 mm distance, filled with Ar+CO2 (9:1), 5 mm gap. 2. Ionization chambers filled with Ar+CO2 (9:1), 5 mm gap 3. General purpose device bus (GTB) operates in address or token mode. It delivers 20 MBytes/sec in token mode over up to 100m differential cable. 2x2 Kwords data buffer (35 nsec) 4. Spill control unit (PZA) connects to accelerator controls and requests spills from MEFI library. 5. Scanner magnet control sets scanner magnet currents through two GTBs. 6. VME board (SAM) equipped with 2 MB program memory (17 ns), 16 MB data memory (70 ns, 2 MB permanent), TMS 320 C40 DSP (50 MHz), two links via VME P2 connector, two timers, two GTB device busses, watchdog LEMO output, fiber optic interlock output, control bus. All peripherals can be accessed from VME. JTAG diagnosis is on board. A front panel control bus (8 signals) allows for fast communication. 7. Dual ported GTB-VME memory board (ODS) (16 MB) with registers and a word counter. The complete hardware setup is shown in Figure 2. Figure 2: VME crate of the control system. B. The Scanning Process Figure 3 shows a schematically view of the components including the interlock and watchdog lines. When the software of the DSPs and the treatment plan has been loaded into the VME boards, the scanning process is started from the operator console via the control bus. In Figure 4 the functionality of the different SAM boards is shown together with the relevant devices. 1. All DSPs start execution at the first point in the plan. 2. SAMI 1 sums up particle integrals sampled by the IMS electronics every 12.5 µsec. 3. If the required value is reached, the next point is signaled on the fast front panel control bus, and all DSPs switch to the next point. SAMS sets the scanner magnets to the next point. The spill is not interrupted! 4. At the same time SAMI 1 sends a data package via a DSP link which is passed through all modules' rear sides back to the sender. Each module inserts its measured values into the package, i.e. SAMO the average position and the width of the beam. 5. The last module in the chain, SAMD, copies the complete package into the remote memory, ODS, point after point. 6. When the end of a plane is reached, this is also signaled through the fast control bus. In this case SAMI 1 aborts the spill, because the next plane could require a different energy. SAMP requests new spill values (MEFI) from the accelerator. SAMP also sets the gain of the ionization chamber amplifiers according the beam intensity. Figure 3: Schematic view of the VME crate. Figure 4: Schematic functionality of the VME crate. The position of the beam is continuously measured by the two independently working SAMO1 and SAMO2 boards. The second ionization chamber verifies the values measured from SAMI 1. All DSP programs can signal interlocks in case of errors, i.e. a wrong beam position and must send keep alive signals every 350 µsec to a watchdog unit. The difference between the average beam position on one point and the requested value is used by SAMS to correct the position of the next point up to 5 mm. III. DATA SERVER The SAM board on top in Figure 2 writes after each point the data package with the measured values to the ODS memory located in a different VME crate. In this crate there is a data server (Eltec M68040) running under LynxOS. It communicates through the memory with SAMD and delivers the data packages as they arrive via TCP to a connected client. Figure 5: Data Transfer to external Programs. Currently there are two clients: the therapy on-line monitor TOM and the analysis program LEA, as shown in Figure 5. The important feature of this communication between the control system and the remote monitor is that the scanning process cannot be disturbed because the memory is big enough to hold all data, and because the data server has no access to the control crate itself. IV. THERAPY ON-LINE MONITOR TOM Figure 6: Therapy On-line Monitor TOM in action. The monitor is started automatically when the treatment starts. First, it displays the shapes of all planes. Then it connects to the data server. During the treatment it displays a map of the required points of the current plane together with the measured positions in nearly real-time. Thus the treatment process is visualized. The program can run on VMS, AIX, or Linux. It uses the graphic package IDL (Creaso, Inc.). Figure 6 shows the monitor as seen during the treatment. In the upper right corner one can see the circles marking the required positions and the white dots on the measured positions. After the treatment the whole data set is saved to disk and can be reviewed later. A GUI controlled analysis can be done to get a comprehensive view of the treatment process, i.e. all deviations of position and intensity from the required values for each point. The lower graph in Figure 7 shows these deviations. The white spots mark the planes. The upper part shows the position and intensity deviations for one selected plane together with a numerical table. In the example shown the position was exact within ± 0.5 mm. Figure 7: Treatment analysis after the treatment. V. DATA ANALYSIS WITH LEA From the beginning of the project it turned out to be necessary to analyze the beam characteristics and to develop the scanning algorithms even before the components were ready. In Figure 8 one can see that the spill intensity fluctuates heavily. This makes the on-line numerical calculation of the positions difficult. Criteria had to be found when a calculation is possible and necessary. Figure 8: Spill Intensity over Time. A. Data Acquisition During the first phase of the project the GSI standard acquisition system MBS [8] together with LEA had been used to analyze the beam and to develop the algorithms for the position calculation and the interlock conditions. Since the scanner hardware is in operation it is used with different DSP software also for data acquisition. The data is transferred through the data server directly into LEA. The front ends optionally deliver raw data from the MWPCs or calculated positions and widths of the beam. Spills can be requested from the communication processor ASR. A. Beam Analysis The General Purpose Analysis System LEA is composed of a histogram manager, a command line interface, a graphical user interface (shown in Figure 9) and uses IDL (Creaso, Inc.) for visualization. It is implemented on Linux, AIX, and VMS. Event data can be input from MBS, therapy data server or standard raw data files. The command interface, the graphics and the analysis (on-line or off-line) run in several threads. This feature is very convenient when running on-line. Figure 9: LEA Control Panel and Position Distributions The position stability of the beam and the electronics of the MWPC read-out must be checked carefully before each treatment. In the top frame of Figure 10 the average beam position is plotted for each of the 253 spills with different energies. The upper curve with the horizontal positions is constantly too high, the lower curve with the vertical positions shows an energy dependence of 2 mm. These curves are used to calibrate the scanner system. As a result the energy dependence is below 0.8 mm as seen in the lower frame. The calibrations have been proved to be stable over weeks. Figure 10: Calibration of Beam Position. VI. FURTHER DEVELOPMENTS The SAM modules in conjunction with the versatile GTB device bus are useful also in other data acquisition systems. For an upgrade of the 4 detector DAQ at GSI an enhanced version utilizing two C67 DSPs is under work. VII. REFERENCES [1] G. Gademann et al., "The Medical Heavy Ion Therapy Project at the GSI in Darmstadt", Strahlentherapie und Onkologie 166, 1990, pp. 34-39 [2] M. Krämer et al., "Treatment Planning for Heavy Ion Irradiation I+II", Book of Abstracts 6 th Workshop on Heavy-Charged Particles in Biology and Medicine, 1997, Baveno, Italy. [3] H. Eickhoff et al., "Accelerator Aspects of the Cancer Therapy Project at the GSI Darmstadt", Proc. 5 tth EPAC96, June 1996, Vol. 3, p. 2641 [4] H. Brand et al., "Therapy Slow Control System, Data Analysis and Online Monitoring", GSI Scientific Report 1997 [5] E. Badura et al., "Safety and Control System for the GSI Therapy Project", Proc. ICALEPCS97, Beijing, Nov. 1997, pp. 555-558 [6] J. Pawelke et al., "In-Beam PET Imaging for the Control of Heavy-Ion Tumour Therapy", IEEE Trans. on NS, Vol.44, No.4, August 1997 [7] Th. Haberer et al., "Magnetic Scanning System for Heavy Ion Therapy", Nucl. Instr. and Meth., A330, 1993, p. 296 [8] H. G. Essel, N. Kurz, "GSI Data Acquisition System MBS Version 3.0", GSI Scientific Report 1998, p. 188