Advanced Manufacturing Laboratory
advertisement

Advanced Manufacturing
Laboratory
Good Ship– Final Report
May 1, 2003
Contents
1.0 Abstract
p.4
2.0 Product Design
2.1 Components
2.2 Critical Design Parameters
p.4
p.4
p.7
3.0 Process Tooling Design
3.1 Hinge die
3.2 Molds
3.2.1 Nozzle Mold
3.2.2 Cabin Mold
3.3 Abrasive Water Jet
3.4 Feeders
3.5 Vacuum Forming
3.6 Packaging
p.8
p.8
p.8
p.9
p.9
p.10
p.11
p.12
4.0 Production Plan, Schedule and Resources
4.1 Flow Analysis
4.1.1 Tray
4.1.2 SCARA end effector
4.1.3 Thermal press end effector
4.2 Robotic code
4.3 Resources
p.13
p.13
p.13
p.13
p.14
p.16
p.16
5.0 Budget and Schedule
5.1 Budget
5.2 Schedule
p.16
p.17
6.0 Conclusions and Recommendations
p.18
7.0 Appendix
p.20
BLAST CAT
http://www.rpi.edu/dept/aml/course/02-03/boat/teamb/www/Index.html
Company Members
Will Barnes
President
Eric Ascenzi
Secretary
Ken Hoffman
Rich Marsh
Mohamad Khaldi
Chester Bull
Edgar Sandoval
Chris Ogunade
Bill Lauer
Brendan Hathaway
Mauricio O’ Connell
Jason Baniak
1.0 Abstract:
The purpose of this document is to describe how Good Ship will manufacture a
toy boat as sponsored by RPI-AML, and several external vendors including Arcadia,
Kimberly Clark, and BASF. The proposed boat will be a double keeled hydrofoil
featuring balloon powered locomotion, intended for use as a desktop ornament and
functional toy. The overall dimensions are approximately 8” x 5” x 2”. The hull will be
thermoformed and ultrasonically welded to a plastic injection molded nozzle. This
nozzle will be connected to an anodized aluminum deck featuring the logos of the
sponsors through heat stake attached hinges. A plastic injection molded cabin will also
fasten to the deck through heat stakes. The resulting cavity will enclose the balloon, and
provide storage space for desktop items. Thus far, approximately 500 dollars have been
spent for materials and parts. The rest of the budget paid for packaging, tumbling, and
machining costs. All parts have been made and the assembly process is going on as of
this date.
2.0 Product Design:
The function of the toy boat being produced by Good Ship will be a functional toy
boat as well as a desktop ornament. The internal cavity serves a dual purpose. As a toy,
it will accommodate the balloon used for locomotion and as a desk organizer it will
provide an attractive and convenient place to keep writing utensils, staples, erasers, spare
change or any number or useful items.
2.1 Components:
The proposed design consists of five components (see figure F for complete layout).
1) The hull of the boat is a thermoformed ABS plastic double keeled hydrofoil.
This configuration offers a stable base both in and out of the water.
Figure A
2) The deck of the boat is cut from aluminum sheet stock. They will feature the
logos of the company sponsors. The deck was chosen to be metal to help
company members experience a more robust array of manufacturing procedures.
Figure B
3) The boat cabin is constructed from injection molded ABS plastic. Although it’s
only function is to be visually pleasing to the consumer, it is certainly important
to the team members; it features the RPI bullet. It will attach to the deck via heat
staking.
Figure C
4) The nozzle is also formed from injection molded ABS plastic, but it is an essential
piece of the design. The nozzle will be ultrasonically welded to the hull and
hinged to the deck via heat staking. The nozzle also provides a means of
propulsion for the boat, by attaching a balloon to the interior protrusion. Filling
the balloon with air from the exterior spout will cause the deck of the boat to rise,
while air escaping from the same spout will push the boat forward.
Figure D
5) Lastly, the polymer hinge strip material will be purchased. A special die will
simultaneously punch the stake holes and cut the material to the proper
dimensions. As mentioned before, the hinge will connect the nozzle and the deck.
Figure E
Figure: F (Exploded View)
2.2 Critical Design Parameters:
Plastics
All plastic parts must be constructed from the same material for two main reasons.
First, if everything is constructed from the same substance, material ordering becomes a
trivial matter. Second, ultrasonic welding works best when the two materials being
joined are the same.
Deck
The deck raises several concerns including fit, finish, and safety. It must be
specifically dimensioned such that it perfectly covers the hull otherwise the aesthetic
value will be compromised. Since it offers the most surface area, it will serve as the
location for company sponsor logos. These will be scribed in with the abrasive water jet
cutting machine. These methods will also be used to cut the decks from the sheet stock.
Abrasive water jet cutting creates significant burring around the edges. Since the product
is required to be “child-safe”, the decks will be subjected to a course of tumbling and/or
smooth sharp edges and corners.
3.0 Process Tooling Design:
3.1 Hinge die:
A special die will be constructed to prepare the hinges for use with the boat
design. First, a pre-stressing die featuring a 45 degree ‘V’ shaped slot will be
constructed. The hinge strip material will fed through this die using the strip stock feeder
until a sufficient level of pre-stressing has been achieved. Second, another die will be
constructed which will simultaneously punch the holes and trim the stock into one inch
lengths. The movable half of the die will have 4 pins which punch the holes, while
opposing shear blocks act like a scissors to clip the individual hinges to length. When the
die separates, a stripper plate will comb the hinges off the pins so they can be collected.
The extreme set-up time for manufacturing this die was the major inhibiting factor at this
point. Four punch pin holes must be drilled and reamed into the existing scissor block
die. The holes could not be drilled into the top and bottom halves of the die
simultaneously because there would be no accurate way to locate the die to the hydraulic
press locator plates. The solution was to drill the holes in the top of the die, then use the
CMM to arbitrary measure the coordinates of these holes in relation to a locator pin.
Using these measurements, the top half of the die was recreated with SolidWorks.
Measurements were taken from the SolidWorks model and mapped onto the lower half of
the die in reference to a locator pin. Finally, the bottom half of the die was clamped onto
the table of the milling machine. Using a dial indicator the locator pin was set as the
origin, and the other four holes were drilled and reamed to size. Work left to be done
includes milling a channel so the punched circular waste material can be removed, and
cutting the punch pins to length.
3.2 Molds:
The design of the plastic injection molds is based on the CAD developed for the
parts. Changes had to be made to the CAD before the molds could be made. It was
decided at the end of the semester that the deck of the ship would consist of two parts. A
piece of sheet would make the flat portion of the deck while the cabin or raised area
would be plastic injection molded. It was found that since the heat steak tabs on the
cabin had to be longer to compensate for the decrease diameter in the sheet deck. For
uniformity these changes were made for the nozzle as well. The new heat steak tabs had
been designed so that they can mushroom enough to hold all the parts together.
After the CAD was reworked the EdgeCAM was the next step. The molds were
of such a size that permitted two nozzles to fit on each mold. This will half the time
necessary to manufacture all the nozzles. The cabin however is larger than the nozzle
and therefore will have to be made one at a time on one single mold. The runners are
1/8” diameter for both the molds and there is one set of runners going opposite directions
from the sprue to supply material for both the nozzles.
3.2.1 Nozzle Mold :
It was discovered that in order to inject the nozzle molds there had to be draft
angles on all the major features. Therefore the moving side of the mold has a 7 degree
draft angle on it while the stationary side has a 2 degree. The reason for this difference in
draft angle amounts is because the moving side had deeper features than the stationary,
therefore in order for the parts to look relatively straight they should meet on both sides
of the mold. This arose another question, should the bottom of the pocket retain the
dimension or the top. I decided that the top dimension would be compromised because
the bottom dimensions were more critical to the design.
Due to our constraint in time and mistakes made, the nozzle mold had a problem
with one of the two nozzles in the mold. This has caused us to go to a backup of making
one nozzle at a time which doubled our production time.
3.2.2 Cabin Mold:
The EdgeCAM for the cabin mold is complete and the mold is currently being
machined. A few changes were made to the cabin mold as described in the last report.
The parting line of the mold was shifted so that the cavities that form the back and side
tabs of the mold are located completely on the moving side of the mold. This allows for
easier machining. A seven degree draft has been added to the cabin body to facilitate
removal from the mold. Finally the lettering has been resized to allow it to be machined
with a 1/16 inch endmill, and the orientation of the lettering has been reversed so that it
appears right-side-up when the boat is packaged. Some additional hand machining was
performed to the moving side of the mold to drill and ream for the ejector pins.
The plastic for the cabin parts is natural ABS with red colorant added. Red
colorant consistent with the RPI logo has been ordered through BASF. The cycle time
for producing plastic parts is about one minute per part when the automatic operation of
the Hunkar PIM is used.
The only problem that arose when producing the cabin was it had no runners,
which gave us a problem of the plastics sticking to the mold. This was avoided by using a
specific chemical spray on the mold during production to stop the plastic from sticking to
the mold.
3.3 Deck:
The Abrasive Water Jet (AWJ) was used for cutting the perimeter and scribing the
sponsor’s logos for the decks. 640 decks were produced.
In order to properly accomplish both procedures, that is, cutting and scribing on a
single piece, two AWJ programs had to be designed. The first program scribes the deck
board detail into the aluminum sheet. Light Scribing is achieved by assuming the
aluminum sheet is 1/32” thick then running the scribe option on the AWJ. The scribing
process only uses water. There is no abrasive being used while scribing the sponsor’s
logos. The second program cuts out the profile and the holes assuming the aluminum
sheet is 1/16” and using the regular setting.
As mentioned before, two different files were needed to manufacture and produce
the deck appropriately. The first file was used for the scribing option from AWJ software
package. This file was in charge of writing out the sponsor’s names. The second file is
the profile option in the software which will be in charge of cutting the perimeter of the
deck and the holes. The finished cut maintains a tolerance that is approximately 0.001”
and a Center Line Average (CLA) that is suitable for our purposes in producing the toy
boat.
Due to several problems that took place with the software package (Flowpath), we
were not able to start mass production of the decks until March 24th. Decks were cut
from 2ft. x 2ft. 1/16in thick aluminum sheets. This allowed making 12 decks from each
sheet. To be able to create the 12 decks from each sheet, a cutting pattern needed to be
done in the software. The software only allows you to pattern the decks one by one,
taking a great amount of time. Another problem with Flowpath is that it does not allow
you to save the pattern after it is finished. You need to export this pattern to a different
package called Flowcut. Flowcut was the software package that actually realized the
cutting and scribing, and the pattern can be saved in this software program. But if a
mistake was made on the pattern you need to change the whole pattern from Flowpath,
you can not change anything in Flowcut. This problem occurred the week before spring
break, and it was required a whole new pattern when returning from the break.
The second major problem was that the default options in the software were
changed by a previous user, who did not set the options back to default. It took a lot of
time with trial and error to fix these settings. Aren Paster helped us by fixing the settings
and he also built a holder that helped us cut several decks at the same time.
Another problem that was encountered, was the aluminum that was donated from
Arcadia was from a different series than the ones we had used during our trials. This
small change in the material properties gave problems with the scribing, and several trials
were needed with the new material to obtain the appropriate results.
After all the problems were debugged, the production of the decks went pretty
smoothly. The manufacturing process started by scribing 3 sheets one by one, then
stacking them on top of each other and cutting the 3 sheets at the same time. The results
were very good, but this process was taking a great amount of time. Because of this
reason, the process was changed to scribing 5 sheets one by one, and then stacking them
and cutting the five sheets at once. This change did not affect the quality of the decks
and increased our speed manufacturing process considerately.
After cutting the perimeter of the decks, their outside became rough, so the initial
decision was to tumble the decks. After cutting the first 180 decks, this batch was
tumbled. The team did not like the results. The decks surfaces were very smooth, but
they had a lot of scratches. Due to this reason the team decided to stop this process and
buy a tool bit for the perimeter cutter. The tool bit allowed us to sand the roughness of
the other 460 decks and avoids the scratches being made by the tumble machine making
the decks look and feel great.
The cost for using the AWJ to produce the 640 decks was the following:
The scribing cost was $85.60; the cutting cost was $128.52; giving us a total of $214.12.
As a recommendation for the following years, the software packages for the AWJ need to
be changed for a newer and more user friendly program
3.4 Feeders:
The automated assembly for the toy boat required several feeders to properly
position the five separate parts of the boat. Part positioning is critical in automated
assembly. Each part must be consistently placed in the same location due to the
constraints of the robots. If the placement is just slightly incorrect it is possible that either
the robot will miss picking up the part or it will be positioned incorrectly in the next step
of the assembly. So to accomplish this goal, five different feeders were designed.
The first three feeders are rudimentary gravity feeders. These gravity feeders are
used for the hull, cabin and nozzle of the boat. The three feeders are designed similarly to
one another except for size and shape of the track. Gravity feeders were used for these
parts due to their complex geometries. The gravity feeders use inclined planes that the
parts are stacked side by side on. The end of the planes has a barrier that the part will rest
against. This is the final position of the part. From this position the robotic end effector
extracts the part. Gravity then positions the next part. The feeders are able to hold
between ten and twenty parts at a time. They have to be manually reloaded.
Parts that have a smooth surface profile have many more options for feeders that
are more space efficient. So the last two feeders are escarpment feeders. The first feeder
is used to position the deck. Since the deck is flat 1/8” aluminum with no surface
features, it is easily stackable and can slide against another deck without complications.
Therefore, we vertically stacked the decks and the bottom deck is pushed out into
position by a pneumatic piston. The bottom deck is then positioned in a void that is in the
shape of the deck. This way the position is fixed so it can be consistently extracted by the
robot. When the deck is removed the piston retracts and another deck falls into the
depression.
The hinge feeder is identical to the deck feeder with some obvious differences.
Since the hinge is plastic it is light and slightly bowed so we are applying weight to the
top stack to make sure the bottom hinge falls into the void. We have also placed some
alignment studs in the void to help fix the final position of the hinge.
All feeders were completely built ahead of schedule. The feeders have been built
so they can be easily modified to account for bugs in the assembly process. The feeders
are built almost entirely of aluminum. They are bolted together instead of welding to
allow for ease of modification. There has been no cost associated with building the
feeders. The AML lab has had all the scrap material we needed to complete all the
feeders. There was some hold ups for building the feeders. The first road block was that
there was the possibility of parts changing dimensions. We also don’t have a prototype of
the hinge. This causes problems in designing the feeder. At this point we are still not sure
how well the hinge feeder is going to work in the assembly process. We have not been
able to test it yet. The contingence plan is to attach the hinges to the nozzle by hand. This
also helps to eliminate the problem of the nozzle stud diameters being too large. All other
feeders have been tested and prove to work well.
3.5 Vacuum Forming:
The hull of the boat was created by vacuum forming plastic sheets over a mold of
the hull. We started by making a rapid prototype of the mold and mounting it to a piece
of plywood and formed plastic over it. We used the formed plastic to cast four urethane
molds that were mounted together on plywood. After smoothing the casts and making
some small modifications to improve their shape, we added locator pins to aid in the
process of cutting the hulls out. We then found it necessary to drill very small holes
through the plywood of our mold, which allowed the air to be pulled through the
plywood, but the holes were small enough that the plastic didn’t get pulled into them.
This gave us much better results when we vacuum formed the sheets. The only problem
we ended up with during the vacuum forming process was the material stretching too
thin. The curved area near the front of the hull was stretched very thin and we found no
way to really fix this problem. By changing some of the settings and adding some holes
to the mold, we could make this area thicker, but decided the only way to completely
solve the problem was either use thicker plastic sheets, or change the design of the hull so
it wouldn’t stretch as far.
After forming some of our sheets, a frame was built from aluminum bars to hold
the sheets while they were cut apart with the abrasive water jet (AWJ). Using the locator
pins that we had put into the mold, we build a frame that supported the plastic sheets and
used those pins for alignment. During the process of cutting the sheets, we found that the
sheets moved around too much from the pressure of the AWJ and the water bubbling up
from the reservoir below for our original design. We tried solving this problem by
increasing the dimensions of the hull so that we weren’t trying to follow the edge of the
hull as closely. This allowed us to cut the hulls out without putting holes through the
bottom and cutting off the sides, but the hulls were still shifting between cuts, so every
few cuts some realignment was necessary. A heavier holder with a better method of
holding the sheets probably would have helped the hulls come out better, but
unfortunately we didn’t have the time to attempt this idea so we tried to work with what
we had already built.
After all the hulls had been cut out, the edge of each hull was very rough with
small plastic bits hanging off. We decided to use some 100-grit sanding screen to
manually sand the sides of each hull to smooth them out and make them look nicer.
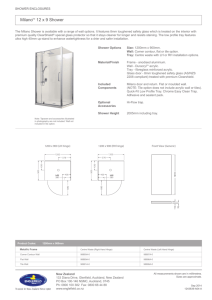
3.6 Packaging
The packaging for the toy boat is more likely going to consist of several different
methods of packaging. All method are going to use a “9 x 6 ½ x 2 ¾” box. 650 boxes
were purchased from ULINE Company for $0.35 each. The boxes differ in that they look
and shape of the logo, the cuts made on the boat for design purposes and other added
incentives to make the presentation of the product.
Figure G
Due to cost of material and budget, we have found ways that we will be able to
get 200 stickers of the highest quality, and making the rest from printing on sticky paper.
We also allotted the use of a laser cutter to cut the box in a shape appeasing to the team
and customers. The rest of the packaging has all the customers, school and team names
and logos on it and also other things that make packages unique from each other. All this
ends up costing $500. An prototype can be seen on the below.
Figure H
4.0 Production Plan:
4.1 Flow Analysis
The entire assembly process will take place at the Scara Robot. Located at this
station are the feeders for the cab, the steel deck, the nozzle, the hinge, the thermal press,
and sonic welder. The Scara robot will place these items in the order mentioned onto an
assembly tray. The tray will hold all the items in place to be thermal pressed. All 10
stakes will be pressed at the same time. The pallet will be ejected from the thermal press
and the Scara robot will move the pallet onto slider for the sonic welder. The scar will
place the hull onto the tray. Because there are two points to be welded the slider will go
in once and hit the first stop, then it will slide back out. The first stop will be removed
and it will slide back in and hit the second stop so the second point can be welded
Tray
The assembly tray will be machined from polyethylene and will hold all the
pieces of the boat together during the thermal press stage and the sonic welding. Because
the tray is only a ½ thick feet were placed in each corner to create enough clearance for
the cabin. Two locator plates were machined to match the feet of the assembly tray. One
plate will be mounted on the slider for the thermal press and the other plate will be used
on the slider for the sonic welder.
Scara End Effector
The end effector had to be capable of picking up the small items such as the
hinge, but also the bulky items such s the tray. It accomplishes this by having one branch
with matching 10 mm suction cups and a 15 mm suction cup, and another branch with 20
mm suction cups. The branch with the 10 mm suction cups will be able to grab and lift
the hinges. The branch with the larger suction cups will be able to lift the cab, deck, and
nozzle. Utilizing both branches, each grabbing a side of the pallet, the end effector will
be able to lift the pallet and move it from station to station.
Thermal Press End Effector
In order to press all 10 stakes four heating elements had to be utilized. Two of the
heating elements will press the singles stakes on the front of the cab, and the other two
stakes will press the 8 stakes of the hinges. In order to press 8 stakes with two heating
elements each heating element will have a 1 in.^2 brass block. This will allow four
stakes to be pressed by one heating element. Cooling must also be supplied to each
heating element. A plastic manifold will supply cool air to the four heating elements. A
drawing can be found in the appendix.
Scara places cab onto tray
Scare places deck on tray
Scara places rear deck/nozzle onto tray
Scara places hinges onto tray
Thermal Press all ten stakes
Scara places tray onto sonic welder slider
Sonic weld tabs
Cycle time will be 1:15 seconds
(Figure I)
4.2 Robotics Code (Actual code in the appendix)
The process of writing the robotics code went very smoothly. First pseudo-code
was written to get a general idea of the order that everything needed to occur. We then
used an example code from the AML Manual that gave us the structure of the program
and we were able to use a function that was designed to lift a blade, but we are using it to
lift all of our parts from their feeders. For some of the other processes such as thermal
pressing and ultrasonic welding, we made a step by step list of instructions to perform
these tasks, then filled in the necessary lines to perform each of these steps. Finally we
wrote a main function that called each of these sub-functions in the proper order to follow
the pseudo-code.
We programmed some random points into the robot to be sure the code was
written properly and performed the tasks correctly. After testing, we found a few small
grammatical errors in the code that were quickly fixed and the program seemed to work
correctly. We are now in the process of programming the real points so the robot will lift
the parts from the feeders and carry them to their proper destinations. We have
programmed a few of the points into the system and plan to finish them next time we
have access to the robot. The only things that still need to be finished in the code are
adding the proper input and output ports for the ultrasonic welder and thermal press to
activate them and check their ready status, and controls for the pneumatic activators for
feeders that have pneumatic parts. Both of these are very simple to add and our only
delay is waiting until the system is setup and we find which ports everything will be
connected to.
4.3 Resources:
In our current plan, we should have all the resources necessary to complete the
tasks required to create the 600 boats. The machines used in the AML will be the plastic
injection-molding machine, the rapid prototype machine (depending on the results of
cheaper alternatives), the hydraulic press, the SCARA and Staubli robots, and the waterjet. We will also need some additional resources from other locations such as the MDL
where we will need to use the vacuum-forming machine. There are also many other
resources to consider which we will be using. Some of the most important is the time and
effort of all our group members, a $3000 operating budget which we will need in order to
buy supplies such as the plastic for vacuum forming, and machining time which will
allow us to have others do the creation of the molds which will save us time.
5.0 Budget and Schedule:
5.1 Budget: (To be revised)
Highlited entries are estimates.
Hull
Price Per Unit
$0.45
Deck
Total Price
Price Per Unit
$271.80
$0.79
Molds
$135.
00
$135.
00
N/A
$95.00
N/A
$0.00
$0.00
In-House Expenses
Total Price
Cabin
Price Per Unit
Materials
Machining
Notes
Total
No AWJ cut time known for
separating hulls.
$0.25
$150.00
$2.16
$1,200.00
$0.00
$556.
80
$1,29
5.00
May have to build with nonscavenged mold plates.
Total Price
$20.00
$0.00
$0.00
Nozzle
Price Per Unit
$0.00
$0.00
$0.00
Hinge Strip
Total Price
Price Per Unit
$20.00
$0.10
$0.00
N/A
$0.00
$0.00
Total Price
$60.00
N/A
$0.00
Price Per Unit
N/A
N/A
$0.00
Total Price
$50.00
N/A
$0.00
Feeders
$20.0
0
May have to build with nonscavenged mold plates.
$20.0
0
$60.0
0
May have to build with nonscavenged materials.
$50.0
0
Highlited entries are estimates.
Materials
Molds
N/A
N/A
$16.67
Total Price
Price Per
Batch
N/A
N/A
$100.00
N/A
N/A
$2.00
Total Price
N/A
N/A
$1,200.00
External Expenses
Price Per
Tumbling
Batch
Anodizing
Balloons
Price Per Unit
Total Price
Packaging
Price Per Unit
Total Price
Pins /
Sleeves
Price Per Unit
Total Price
Machining
$0.38
N/A
N/A
$230.00
N/A
N/A
$0.39
N/A
N/A
$234.20
N/A
N/A
N/A
N/A
N/A
N/A
Variant
$79.18
Total Expenses
Total
Upper Bound Estimate by
Science Center Employee.
$100.
00
Upper Bound Estimate by
Science Center Employee.
$600.
00
Balloons printed with company
logo, not necessary.
$230.
00
Cost is for box method, subject
to change.
$234.
00
11 Assorted ejector pins, 2
Sleeves.
$79.1
8
$3,24
4.98
5.2 Schedule
Week 1: - Completed
Become acclimated with team members
and staff
Assign leadership positions
Establish group contract
Exchange schedules of members
Week 3: - Completed
Presentations of researched areas/
alternate methods
o Modify AML I’s design plan
Assign permanent areas of responsibility
based on interest & schedules
Identify supplies necessary
Week 2: - Completed
Review AML I’s design plan
o Identify gaps
o Assign areas for further
research
Week 4: - Completed
Present final mold designs
o Obtain approval
Present financial projections
o Obtain approval
Begin to Identify and create customized
machine settings (i.e., specialized robot
Contact suppliers & mold makers
Obtain price estimates
Week 5:
Fabricate hull mold
Submit mold designs to makers
Obtain necessary supplies
Tweak hinge stamping settings
Week 7:
Hinge manufacturing
Fabricate hull mold
Week 9:
Cabin-Deck manufacturing
Tweak nozzle plastic injection mold
settings
Week 11:
Rear Deck manufacturing
Tweak rear deck plastic injection mold
settings
Hull manufacturing
Cabin-Deck manufacturing
Week 13:
Rear Deck manufacturing
Nozzle manufacturing
Robotics programming
Week 15:
Assembly
manipulators)
Week 6:
Tweak hull vacuum forming settings
Tweak hinge stamping settings
Week 8:
Fabricate hull mold
Hinge manufacturing
Week 10:
Cabin-Deck manufacturing
Tweak nozzle plastic injection mold
settings
Week 12:
Rear deck manufacturing
Hull manufacturing
Cabin-Deck manufacturing
Robotics programming
Week 14:
Nozzle manufacturing
Fine-tune robotics programming
Week 16:
Assembly
6.0 Conclusion:
The molds have been designed, CAD has been written and all the problems have
been ironed out. All parts of the boat have been manufactured and all assembly parts
have been made. The teaching of the assembly points is what is left to be finished, and
the assembly itself.
640 decks were scribed and cut. One logo per each sponsor was scribed in the
AWJ. The final cost for the use of this equipment was $214.12. The logos were scribed
with just water and no use of the abrasive. The perimeters were cut with the normal
setting for 1/16” thick aluminum. The procedure had 2 different parts. First 5 sheets
were scribed, and then the 5 sheets were stack on top of each other for the cutting
process. This process was extremely effective and fast. After the decks were cut with the
AWJ, a perimeter cutter was used to take the roughness from the perimeter of the decks.
As a final recommendation for teams to follow, we believe that the AWJ software should
be updated to a newer and more user friendly package.
Our original plan incorporated the transport system and the Staubli. After the
cabin, deck, nozzle, and hinges were heat staked the Scare was going to place the
assembly tray onto the transport system which brought it to the Staubli station. The
Staubli was going to take care of the sonic welding operation by placing the hull on top
of the already assembled pieces. However, after further investigation it was easier to
have the Scara robot perform all the duties. It cut down on cycle time and simplified the
assembly process.
One problem we encountered was being able to lift the assembly tray with the Scara
end effector. Given that the vacuum had a suction pressure of 80 kPa the formula F=PA
was utilized to size the suction cups. In conclusion, on one branch there are two 10 mm
suction cups (used to lift the hinges also) and one 15 suction cup, on the other branch
there is one 20 mm suction cup. Using all at the same time provided enough force to lift
and move the assembly tray.
The feeders are being built almost entirely of aluminum. They are being bolted
together instead of welding to allow for ease of modification. At this point there has been
no cost associated with building the feeders. It appears that the AML lab has all the scrap
material we need to complete all the feeders. So the contingence plan for the hinge feeder
is to simply stack them on top of each other and have the robot programmed to increment
its height position as each hinge is removed. At this point we are in the gray in finishing
everything before schedule. We have caught up and can possibly have everything done
by the day of our sponsors scheduled presentation.
APPENDIX:
Robotics Code
##BOAT ASSEMBLY
##
## DEFINE ALL NECESSARY POINTS
SAFE: NEW PT( -228.65, 400.32, 0.00, 0.00);
GCABIN: NEW PT( 524.25, -152.44,
0.00, -1.37);
PCABIN: NEW PT ( 75.93, 794.75, -143.12, -1.39);
GNOZZLE: NEW PT( 466.36, -2.66, -187.50, 160.50);
PNOZZLE: NEW PT( 75.93, 794.75, -143.12, -1.39);
GDECK: NEW PT( 669.01, -125.42, -190.55, 160.50);
PDECK: NEW PT( 83.50, 793.04, -143.12, -1.39);
GHINGE: NEW PT( 406.43, 673.70, -143.12, -1.39);
PHINGE1: NEW PT( 160.80, 774.76, -143.12, -1.39);
PHINGE2: NEW PT( 160.80, 774.76, -143.12, -1.39);
GHULL: NEW PT( -450.99, 478.98, -143.12, -1.39);
PHULL: NEW PT( 62.30, 797.49, -143.12, -1.39);
GTRAY1: NEW PT( 97.61, 793.68, -143.12, -1.39);
GTRAY2: NEW PT( -401.06, 692.11, -143.12, -1.39);
GTRAY3: NEW PT( -401.06, 692.11, -143.12, -1.39);
##
LASTPT();
##
## DEFINE PORT LOCATIONS
##
MAIN_AIR: NEW 48;
## DEFINE SUCTION PORTS
SUCTION1:NEW 27;
SUCTION2:NEW 31;
SUCTION3:NEW 33;
##
THERMAL_AIR:NEW 28;
SONIC_AIR:NEW 29;
OPENED:NEW 1;
CLOSED:NEW 0;
SONIC_READY:NEW 56;
SONIC_ACTIVATE:NEW 83;
THERMAL_READY:NEW 56;
THERMAL_ACTIVATE:NEW 83;
END_PROG:NEW 0;
## SUBROUTINE TO END THE PROGRAM
STOP_PROG:SUBR();
END_PROG=1;
PLED(5,1);
END;
GETCABIN:SUBR();
## SUBROUTINE TO PICK UP CABIN
PDISPLAY(33,'Getting Cabin');
## SET SPEED
SPEED=.2;
## MOVE ABOVE CABIN FEEDER
MOVE(XYR,GCABIN(XYR));
## SLOW SPEED
SPEED=.1;
## MOVE DOWN TO CABIN HEIGHT
ZMOVE(GCABIN(Z));
## TURN ON SUCTION CUPS
WRITEO(SUCTION2, ON);
## WAIT FOR SUCTION TO ACTIVATE
DELAY(1);
## REDEFINE SPEED
SPEED=.1;
## LIFT CABIN TO SAFE HEIGHT
ZMOVE(SAFE(Z));
## END SUBROUTINE
END;
PUTCABIN:SUBR();
## SUBROUTINE TO PLACE CABIN NEAR THERMAL PRESS
PDISPLAY(33,'Placing Cabin');
SPEED=.2;
MOVE(XYR,PCABIN(XYR));
SPEED=.1;
ZMOVE(PCABIN(Z));
WRITEO(SUCTION2, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
GETNOZZLE:SUBR();
## SUBROUTINE TO PICK UP A NOZZLE
PDISPLAY(33,'Getting Nozzle');
SPEED=.2;
MOVE(XYR,GNOZZLE(XYR));
SPEED=.1;
ZMOVE(GNOZZLE(Z));
WRITEO(SUCTION1, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
PUTNOZZLE:SUBR();
## SUBROUTINE TO PLACE NOZZLE NEAR THERMAL PRESS
PDISPLAY(33,'Placing Nozzle');
SPEED=.2;
MOVE(XYR,PNOZZLE(XYR));
SPEED=.1;
ZMOVE(PNOZZLE(Z));
WRITEO(SUCTION1, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
GETDECK:SUBR();
## SUBROUTINE TO PICK UP DECK FROM FEEDER
PDISPLAY(33,'Getting Deck');
SPEED=.2;
MOVE(XYR,GDECK(XYR));
SPEED=.1;
ZMOVE(GDECK(Z));
WRITEO(SUCTION1, ON);
WRITEO(SUCTION2, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
PUTDECK:SUBR();
## SUBROUTINE TO PLACE DECK NEAR THERMAL PRESS
PDISPLAY(33,'Placing Deck');
SPEED=.2;
MOVE(XYR,PDECK(XYR));
SPEED=.1;
ZMOVE(PDECK(Z));
WRITEO(SUCTION1, OFF);
WRITEO(SUCTION2, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
GETHINGE:SUBR();
## SUBROUTINE TO PICK UP A HINGE FROM THE FEEDER
PDISPLAY(33,'Getting Hinge');
SPEED=.2;
MOVE(XYR,GHINGE(XYR));
SPEED=.1;
ZMOVE(GHINGE(Z));
WRITEO(SUCTION3, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
PUTHINGE1:SUBR();
## SUBROUTINE TO PLACE A HINGE ON HINGE POINT 1
PDISPLAY(33,'Placing Hinge');
SPEED=.1;
MOVE(XYR,PHINGE1(XYR));
SPEED=.1;
ZMOVE(PHINGE1(Z));
WRITEO(SUCTION3, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
PUTHINGE2:SUBR();
## SUBROUTINE TO PLACE A HINGE ON HINGE POINT 2
PDISPLAY(33,'Placing Hinge2');
SPEED=.1;
MOVE(XYR,PHINGE2(XYR));
SPEED=.1;
ZMOVE(PHINGE2(Z));
WRITEO(SUCTION3, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
GETHULL:SUBR();
## SUBROUTINE TO GET A HULL FROM THE FEEDER
PDISPLAY(33,'Getting Hull');
SPEED=.2;
MOVE(XYR,GHULL(XYR));
SPEED=.1;
ZMOVE(GHULL(Z));
WRITEO(SUCTION1, ON);
WRITEO(SUCTION2, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
PUTHULL:SUBR();
## SUBROUTINE TO PLACE A HULL NEAR THE ULTRASONIC WELDER
PDISPLAY(33,'Placing Hull');
SPEED=.1;
MOVE(XYR,PHULL(XYR));
SPEED=.1;
ZMOVE(PHULL(Z));
WRITEO(SUCTION1, OFF);
WRITEO(SUCTION2, OFF);
DELAY(1);
SPEED=.2;
ZMOVE(SAFE(Z));
END;
MOVE_TRAY1:SUBR();
## SUBROUTINE TO MOVE THE TRAY FROM THE THERMAL PRESS TO THE ULTRASON
PDISPLAY(33,'Getting Tray');
SPEED=.2;
MOVE(XYR,GTRAY1(XYR));
SPEED=.1;
ZMOVE(GTRAY1(Z));
WRITEO(SUCTION1, ON);
WRITEO(SUCTION2, ON);
WRITEO(SUCTION3, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
MOVE(XYR,GTRAY2(XYR));
ZMOVE(GTRAY2(Z));
WRITEO(SUCTION1, OFF);
WRITEO(SUCTION2, OFF);
WRITEO(SUCTION3, OFF);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
MOVE_TRAY2:SUBR();
## SUBROUTINE TO MOVE THE TRAY FROM THE ULTRASONIC WELDER TO THE ULTR
PDISPLAY(33,'Getting Tray');
SPEED=.2;
MOVE(XYR,GTRAY2(XYR));
SPEED=.1;
ZMOVE(GTRAY2(Z));
WRITEO(SUCTION1, ON);
WRITEO(SUCTION2, ON);
WRITEO(SUCTION3, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
MOVE(XYR,GTRAY3(XYR));
ZMOVE(GTRAY3(Z));
WRITEO(SUCTION1, OFF);
WRITEO(SUCTION2, OFF);
WRITEO(SUCTION3, OFF);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
MOVE_TRAY3:SUBR();
## SUBROUTINE TO MOVE THE TRAY FROM THE ULTRASONIC WELDER BACK TO THE
PDISPLAY(33,'Getting Tray');
SPEED=.2;
MOVE(XYR,GTRAY3(XYR));
SPEED=.1;
ZMOVE(GTRAY3(Z));
WRITEO(SUCTION1, ON);
WRITEO(SUCTION2, ON);
WRITEO(SUCTION3, ON);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
MOVE(XYR,GTRAY1(XYR));
ZMOVE(GTRAY1(Z));
WRITEO(SUCTION1, OFF);
WRITEO(SUCTION2, OFF);
WRITEO(SUCTION3, OFF);
DELAY(1);
SPEED=.1;
ZMOVE(SAFE(Z));
END;
STAKE:SUBR();
## SUBROUTINE TO ACTIVATE THE HEAT STAKING MACHINE
PDISPLAY(33,'PREPARING HEAT STAKE');
##WAITI(THERMAL_READY,1);
## CHECK THERMAL PRESS IS READY
WRITEO(THERMAL_AIR,OPENED);
## PUSH TRAY INTO THERMAL PRESS
DELAY(1);
## WAIT FOR TRAY TO GET IN
WRITEO(THERMAL_ACTIVATE,1);
## ACTIVATE THERMAL PRESS
DELAY(1);
## WAIT FOR THERMAL PRESS TO START
WRITEO(THERMAL_ACTIVATE,0);
## TURN THERMAL PRESS BACK OFF
##WAITI(THERMAL_READY,1);
## WAIT UNTIL THERMAL PRESS IS READY AGAIN
WRITEO(THERMAL_AIR,CLOSED);
## REMOVE TRAY
DELAY(1);
## WAIT
END;
UWELD:SUBR();
## SUBROUTINE TO ACTIVATE THE ULTRASONIC WELDER
PDISPLAY(33,'PREPARING Welding');
##WAITI(SONIC_READY,1);
## CHECK ULTRASONIC WELDER IS READY
WRITEO(SONIC_AIR,OPENED);
## PUSH TRAY INTO ULTRASONIC WELDER
DELAY(1);
## WAIT FOR TRAY TO GET IN
WRITEO(SONIC_ACTIVATE,1);
## ACTIVATE ULTRASONIC WELDER
DELAY(1);
## WAIT FOR ULTRASONIC WELDER TO START
WRITEO(SONIC_ACTIVATE,0);
## TURN ULTRASONIC WELDER BACK OFF
##WAITI(SONIC_READY,1);
## WAIT UNTIL ULTRASONIC WELDER IS READY AGAIN
WRITEO(SONIC_AIR,CLOSED);
## REMOVE TRAY
DELAY(1);
## WAIT
END;
BOATCODE:SUBR();
##
MAIN PROGRAM
MONITOR(1005,1,STOP_PROG);
##
MONITOR EMERGENCY STOP BUTTON
END_PROG=0;
##
VARIABLE TO STOP PROGRAM, SET
WRITEO(MAIN_AIR, ON);
##
ACTIVATE MAIN AIR
WRITEO(SUCTION1,OFF);
WRITEO(SUCTION2,OFF);
WRITEO(SUCTION3,OFF);
##
TURN OFF SUCTION CUPS
WRITEO(THERMAL_AIR,CLOSED);
WRITEO(SONIC_AIR,CLOSED);
##
BE SURE SONIC WELDER AND THER
REPEAT
##
LOOP THESE FUNCTIONS
{
SPEED=.2;
##
SET INITIAL MOVING SPEED
PMOVE(SAFE);
##
MOVE TO SAFE POINT - PROBABLY
GETCABIN();
##
RUN GETCABIN() SUBROUTING TO
PUTCABIN();
##
PLACE CABIN ON TRAY
GETNOZZLE();
##
PICK UP NOZZLE
PUTNOZZLE();
##
PLACE NOZZLE ON TRAY
GETDECK();
##
PICK UP DECK
PUTDECK();
##
PLACE DECK ON TRAY
GETHINGE();
##
GET HINGE
PUTHINGE1();
##
PLACE FIRST HINGE
GETHINGE();
##
GET SECOND HINGE
PUTHINGE2();
##
PLACE SECOND HINGE
STAKE();
##
HEAT STAKE EVERYTHING
MOVE_TRAY1();
##
MOVE TRAY FROM THERMAL PRESS
GETHULL();
##
GET HULL
PUTHULL();
##
PLACE HULL
UWELD();
##
ULTRASONICALLY WELD
MOVE_TRAY2();
##
ROTATE TRAY AT ULTRASONIC WEL
UWELD();
##
MOVE_TRAY3();
WELD SECOND SET
##
MOVE TRAY BACK TO THERMAL PRE
}
UNTIL END_PROG EQ 1;
ENDMONITOR (1005);
PLED(5,0);
END;