METHODS FOR MODELING AND SIMULATION OF POWER
advertisement

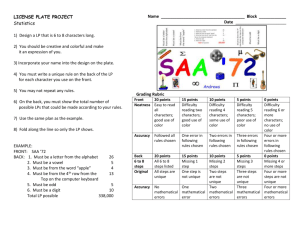
METHODS FOR MODELING AND SIMULATION OF POWER ELECTRONICS AND DRIVES P.J. van Duijsen Simulation Research P.O.Box 397, 2400 AJ, Alphen aan den Rijn The Netherlands, Tel/Fax +31 172 492353 Abstract The availability of personal computers to electronic engineers created a wide range of simulation programs. In general these programs were designed for modeling and simulation of analog circuits. For power electronics various modeling methods were developed. In this paper an overview is presented of the various methods for modeling and simulation of power electronics and electrical drives hereafter referred to as Power Conversion Systems; (PCS). Mathematical modeling methods such as state space equations, modified nodal analysis, differential algebraic equations and transmission lines are discussed and compared. The minimum requirements for modeling (circuit, block-diagram, behavioral equations) and the types of analysis (transient, steady-state, small-signal) are discussed. 1 Introduction Computer Aided Modeling and Simulation of electric circuits started when the first computers in large research centers and universities became available. One of the first circuit simulation program which became quite famous was ECAP, developed at an IBM research laboratory. Although very simple, it was one of the first general programs for solving time varying circuit equations. Different disciplines in electrical engineering required different methods for modeling and simulation. In some disciplines the need for modeling and simulation became more urgent than in other disciplines. For example, the development of integrated circuits, stimulated the design of SPICE, (Simulation Program with Integrated Circuit Emphasizes) [Nagel, 1975]. With the availability of mathematical equations solving programs, which could handle blockdiagram models or modeling languages, for example CSMP, [Korn, 1978], it was possible to build models of power electronic systems or drive systems with the use of Ordinary Differential Equations: (ODE). The use of modeling and simulation methods for power electronics and drive systems was concentrated mainly towards the analysis of dynamical effects in the mechanical part of a drive system. The main problem when defining ODE's were caused by the switches in the electronic power conversion circuit, introducing an acausal non-linear relation [Nelms, 1988]. Next to the growing number of modeling and simulation programs, the number of methods performing a specific analysis upon a PCS was growing. State space averaging [Middlebrook, 1976] is a good example of a modeling method which serves as a mathematical method for deriving insight in the dynamic behavior of switched-mode power supplies. Recently a large number of methods became available for the modeling and simulation of a PCS [Revankar, 1973], [Sankara, 1975], [Kelkar, 1986]. Most of these methods are especially designed for one class of converters, for example DC-to-DC converters with a fixed mode of operation. The problem with these methods is, that they are limited to the application they were intended for. The state space averaging method was originally developed for hard-switched DC-to-DC converters and Switched Mode Power Supplies (SMPS). It has a limited applicability to resonant converters [Yang, 1993]. In this chapter the existing methods for simulation, cyclic-steady-state and small-signal analyses are discussed. The advantages and disadvantages of each method will be highlighted. Simulation Simulation is performed in various ways, but they are all based on numerically solving of non-linear state equations, where independent storage elements like inductors and capacitors, are described by differential equations. Because of the differences between the various models for circuits, digital controllers, analog controllers and components, a multilevel approach is introduced which combines the various models like a circuit model, a blockdiagram and even computer program instructions. The combination of these models is called a multilevel model and is translated into one mathematical model. Numerical solving of this mathematical model reveals the time responses. Cyclic-steady-state analysis Existing methods for cyclic-steady-state analysis are based on the assumption that a set of state equations is defined from which a periodic response can be calculated. This is achieved by setting up non-linear state equations where the state variables at the beginning of the period have to be equal to the state variables at the end of the period of a cyclically switching PCS. The resulting set of equations is solved numerically [Aprille, 1971]. For piece-wise linear circuits direct calculation of the state variables is possible [Lavers, 1986]. Small-signal analysis Small-signal analysis is important for the design of the control of a PCS. Extensive research has been done for DC-to-DC switched mode supplies and numerous methods have been developed [Kassakian, 1991]. The main disadvantage of these existing methods is that they are nearly only applicable to the class of converters the analysing method was originally designed for. For example, state space averaging was originally designed for DC-toDC converters with a fixed switching frequency larger than the bandwidth of the converter. For resonant converters the switching frequency lies within the bandwidth of the internal waveforms of the converter, so state-space averaging can not be applied. 2 Modeling the PCS If non-linear mathematical relations are included, the formulation of a mathematical model of a PCS is limited to the time-domain. With numerical methods, time responses can be calculated. If a mathematical model can describe the behavior with linear mathematical relations and constant parameters, also the frequency-domain can be used. Using numerical methods, a frequency response can be calculated. For mathematical models with linear mathematical relations and constant parameters, with the use of the Discrete Fourier Transformation (DFT) [Papoulis, 1980], a time response can be transformed into a frequency response. Inverse Fourier transformation can be used to transform a frequency response into a time response. Figure 1 : Circuit with components, constant parameters and switches. Figure 2 : Time intervals. a)Time interval fixed. b)Time interval variable. • 2.1 Time-domain A PCS can be described by Differential Algebraic Equations; (DAE): f (x (t), x(t), y(t) , u(t), t) = 0 (1) The DAE describes the non-linear, possible acausal, relations among the time-varying state variables x(t), their time-derivative x(t), the variables y(t) and the input variables u(t) of a PCS. If there are no acausal relations in the mathematical model, the DAE can be simplified to an Ordinary Differential Equation (ODE): x (t) = f (x(t), u(t) ) (2) Switches Semiconductor switches are the main problem in modeling PCSs. There are two possibilities for the operation of the switches • defined with known on and off times (ton and toff). defined by the value of the state variables. In the first case ton and toff are independent of the value of the state variables. An example is a DC converter with continuous conduction mode without control, see figure 1a. In the second case ton and toff are defined both by the control of the PCS and the value of the state variables of the PCS. An example is a DC converter with discontinuous conduction mode. There ton of the freewheeling diode is dependent on the zero crossing of the inductor current, see figure 1b. The mathematical model contains an implicit relation describing the dependency between the inductor current and ton of the diode. A piece-wise linear relation in the mathematical model, consisting of two linear relations, can describe ideal switches: On : u s = 0 Off : i s = 0 (3) If the mathematical model of the PCS does not contain any non-linear relations but only linear and piece-wise linear relations, as given by (3), the mathematical model can be simplified. If the operation of the switches is known in advance and the mathematical model consists of linear ODEs, a simplification can be made. In this case the mathematical model is piecewise linear, which means that the mathematical model can be replaced by a finite number of sets of linear ODEs. The PCS with switches as indicated by figure 2 is replaced by a set of sub-circuits without switches. Each sub-circuit is solely described by linear mathematical relations and the state of the switches defines the connections between the components in the sub-circuit, see figure 3. Figure 3 : Circuit with components, constant parameters and without switches. n T per = T i (4) i=1 A cycle starts at t=t0 with an initial value y(t0) and ends at t=tn with y(tn). For a cyclic-steadystate y(t0) = y(tn), as shown in figure 5. Figure 5 : Time intervals for a piece-wise linear circuit. Models of components Modeling components of the PCS is not unique. Depending on the need of the user a model can be either simple, detailed, or can contain just enough details to model the timedomain behavior satisfactory. The piece-wise linear circuit changes its topology each time the status of the switches changes. The operation of the switches is modeled by selecting, for a specific time interval Ti( = ti-ti-1), the sub-circuit with the valid switch-configuration, (see figure 4). Figure 6 : Figure 4 : Piece-wise linear circuit. For each time interval Ti only one sub-circuit is valid. For cyclic-steady-state analysis the cyclic time interval Tper is equal to the sum of the time intervals per sub-circuit. If the cyclic time interval of the cyclic-steady-state equals n subcircuits, the cyclic time interval equals: Complexity of models. The complexity of the mathematical model is not necessarily related to the complexity of the model of the component. As shown in figure 6 a simple model can contain a (non-linear) acausal mathematical relation and therefore a DAE has to be used for the mathematical model. On the other side a more detailed model can be described by ODEs if it doesn't contain any acausal relations. All the non-linear mathematical relations describing the components in a PCS are functions of time and/or functions of variables. These mathematical relations can be formulated as a DAE, making the description by DAEs more general than any other mathematical modeling approach. In using DAEs, the user has more freedom to set-up a mathematical model than with other modeling approaches, such as block-diagrams, where acausal relations are not allowed. 2.2 2 If one harmonic influences another harmonic, the calculation of the frequency response can not be carried out for each harmonic separately. In this case a Harmonic Balance technique [Nakhla, 1976] is required. The mathematical model has to contain all harmonics that are of interest. The solution for all harmonics is calculated at the same time by solving: g HB ( y1 , ..., y n , p1 ( 1 , ..., n ), ..., pn ( 1 , ..., n ) , 1 , ..., n ) = 0 Frequency-domain In the frequency-domain the frequency response is defined for a dynamic system. The frequency response is given by the gain and phase difference between the frequency components at the input and output of the system with equal frequency. When describing a mathematical model in the frequency domain, there are two possibilities: 1 p(i) denotes the parameters of the mathematical model which are dependent of i. linear mathematical relations with constant parameters and no dependency between the different harmonics. non-linear mathematical relations with time-varying parameters and dependency between different harmonics If there is no dependency between the harmonics, the frequency response can be calculated for each harmonic separately. This means that for each harmonic i the following equation has to be solved: g( yi , p( i ) , i ) = 0 (5) where yi are the variables of the model and (6) Here n denotes the number of harmonics. Compared to (5), the mathematical model (6) is considerable more complex, because of the relations among the harmonics. The size of the mathematical model (6) is one drawback of modeling in the frequencydomain. Relations between harmonics exist in nearly all elements of the PCS. The main contributions are caused by • switches in the electronic power converter. • saturation of components. (For example magnetic components like inductances and electrical machines). • limiters in controllers. If all the mathematical relations can be described by only using (6) without any extra ODEs, the cyclic-steady-state can be calculated directly. This approach is used for telecommunication systems [Nakhla, 1976]. Also for electric machines, Harmonic Balance can be used to describe the influence of harmonics in the machine. Another problem is the definition of the models. The formulation of a mathematical model describing ton and toff of a switch in the PCS is more understandable than a description of the mathematical relations of the switch in the frequency-domain. In this frequency domain description the harmonics in the voltage and current representations, which are caused by the cyclic operation of the switches, are approximated and used in (6). Example Figure 7 shows schematically a control algorithm for a resonant converter. The switch S is turned on if a specific set-signal equals 1 and the output voltage uo is below the reference voltage uref. It turns off at the zero crossing of the switch current is. The set-signal can be defined in a time table in the control algorithm of the PCS. mathematical relations in the frequencydomain, because of the time events taking place in the control of the resonant converter as modeled in figure 7. A concluding remark is that from the frequency response only the cyclic-steady-state in the time-domain can be calculated. Therefore the frequency-domain is not well suited for a general approach of the analysis of a PCS, which has to include the transient behavior, for example the start-up of a PCS. 3 Simulation The number of algorithms for simulation is large. They all require time-domain models. The majority of simulation algorithms is based on state space equations: x (t) = A(x, t) x(t) + B(x, t) u(t) (7) Piece-wise linear model For switched mode power supplies the piecewise linear circuit description is applied to model the switches in the circuit. The matrices A(x,t) and B(x,t) are considered to have constant parameters. Doing so (7) is replaced by: x = Ai x + Bi u Figure 7 : Control of a resonant converter. This is a simple example of a model for a component that includes: 1 function of time 2 function of variables : uo, is This model cannot : set-signal be described by i = 1,..., n (8) where i denotes the sub-circuit of the piecewise linear circuit. The state space approach and the use of piece-wise linearity is used by many authors. In [Kassakian, 1991] state space equations for simulation is discussed for general use. The piece-wise linear description was introduced for sampled data modeling of PCS [Verghese, 1986], [Elbuluk, 1988] and [Kelkar, 1986]. The obtained sampled data models are used to derive transfer functions between the input and output variables of a PCS, through the z-transform [Huliehel,1991]. Problems during switching from one subcircuit to another sub-circuit in a piece-wise linear circuit is explained in [Dirkman, 1987]. Here models are derived which allow a sudden parallel connection of capacitors and secure the continuous current through a series connection of two inductors, which can occur because of the closing or opening of switches. This is assured by inserting current or voltage sources, which cancel the current or voltage spike occurring because of the parallel or series connection. The problem with this method is that the exact value of the current or voltage source value is dependent of the circuit and therefore extra calculation work is needed to define these values. For predefined time intervals transition matrices are calculated which give the solution of the state space equations over a certain interval [t0, t1], [Hsiao, 1987]: t1 x( t1) = x( t0) eA1( t1 - t0 ) + eA1( t1 - t0 - ) B1 u( ) d t0 (9) If the input u(t) is not taken into consideration, the transition matrix i(t) is defined as: x( ti + Ti) = i (Ti) x( ti) (10) and calculated for a fixed time interval Ti. An efficient method to calculate the transition matrix i(Ti) for varying time intervals Ti can be found in [Wong, 1987] where transition matrices with a fixed time interval are precalculated and stored. The lengths of the different time intervals are related to a power of two. A simulation is performed and with the use of a binary search method the transition matrices are obtained for a variable time interval. This final time interval has to be an integer multiple of the smallest precalculated time interval. The general problem with transition matrices is that they are calculated for a fixed time interval. This time interval is dependent on events occurring in the circuit or on control actions. Therefore in [Luciano, 1990] an attempt is made to make the transition matrices independent of the time interval. This approximation is only valid for small variations of the fixed predefined time interval: x( t 0 + T1 + T1) = x( t 0) eA1( T1 + T1) + (11) t 0 + T1 + T1 ( eA1 T1 + T1 - ) B1 u( ) d t0 where Ti<<Ti. A transition matrix has to be evaluated analytical from (11) and has to include Ti. This is considerable more complex than (10). Recently Transmission Line Modeling; (TLM) is proposed for modeling switching power converters, [Hui, 1991]. For transmission line modeling a matrix can be defined which is independent of the status of the switches. Therefore a single system matrix models the piece-wise linear circuit. This is achieved by replacing the switch by a transmission line. The transmission line has either a small inductance or small capacitance. This inductance or capacitance models the parasitics of the switch. The resulting mathematical model consists of a square matrix ATLM with constant entries, the vector x(t) contains the state variables and the vector bTLM(t) includes the time-varying variables like the independent sources and also a variable indicating the status of the switch: ATLM x(t) = bTLM (t) (12) The solution is obtained from: 1 x(t) = A-TLM bTLM (t) (13) Changing the status of a switch only affects the entries of bTLM(t). Since the inversion of ATLM has to be carried out only once, this method seems to have certain advantages over other methods, where the matrix A has to be inverted each time step, [Hui, 1991]. The drawback of the method is, that in order to keep the parasitic inductance and capacitance of the switch low, the time step of the simulation has to be smaller than in the case of the simulation of an equivalent piece-wise linear state space equation. As a result applying transmission line modeling, compared to simulation with state space equations does not reduce the simulation time. In general, the various algorithms and methods have different drawbacks. For a general simulation of a mathematical model as given by (7), numerical integration is applied. The parameters of the mathematical model can remain non-constant. 3.1 Circuit simulation A popular program for the simulation of electric circuits is the SPICE "family" of circuit simulators. The most common is the SPICE2 circuit simulator which, is originally developed at the University of California, Berkeley, during the mid-1970s. SPICE2 [Nagel, 1975] evolved from the original SPICE program, which evolved from another circuit simulator called CANCER that was developed in the early 1970s. SPICE2 became an industry Figure 8 : SPICE algorithm. standard tool. U.C. Berkeley does not support SPICE like commercial software, nor does U.C. Berkeley provide consulting services for these programs. These lacks of support led to commercial versions of SPICE that have the kind of support industrial customers require. Also, many companies have an in-house version of SPICE that has modifications to suit particular needs. The SPICE program is based on the Modified Nodal Analysis (MNA) method, [Ho, 1975]. Suppose a model can be formulated as: A(t, x (t), x(t), h) x(t) = b(t) (14) The parameters of the matrix A are dependent on the variables and state variables in the vector x(t). Vector b(t) stores the values of the independent sources. The time derivative of x(t) is replaced by a numerical integration approximation, where the parameter h is the step size of the numerical integration. The algorithm for SPICE is shown in figure 8. There are three loops inside the algorithm. Loop number 1 exists because of the recursive Newton-Raphson method [Burden, 1985]. Here x(t) is solved from (14) for the time t. If the convergence of the Newton-Raphson method fails, the step size h is reduced and (14) is solved again. This is indicated by loop number 2. If convergence of the NewtonRaphson is reached, the next point in time can be calculated. This is achieved by increasing the time with the step size h as indicated by loop number 3. The main problem of SPICE for the simulation of PCSs is the divergence of Newton-Raphson in loop number 1, which occurs during the zero-crossing of currents through semiconductors. As a result the step size is decreased, which can lead to many cycles through loop 1 and loop 2. In figure 9 the points in time calculated by a SPICE simulation are shown. and to solve x(t) from (15) using the NewtonRaphson method. Mathematical non-linear and acausal relations describing components and their interconnections in the PCS can directly be incorporated in (15). Solving x(t) from (15) using Newton-Raphson implies that the Jacobian matrix has to be set-up: Jacobian = For a general solution to the MNA approach, the inverse of the matrix A(t,x(t),h) has to be calculated inside loop number 1. Another approach is to rewrite (14) to: (15) The evaluation of the Jacobian matrix is time consuming and therefore the main drawback of the use of (15) as a mathematical model. The evaluation can be simplified if only the most important entries of the Jacobian matrix are used. The greatest simplification can be reached if the Jacobian matrix is equal to a block-diagonal matrix, which is the case for MNA in SPICE [Schwarz, 1987]. The modern versions of SPICE are based on (15), where Newton-Raphson is used to solve x(t). During loop 1 in figure 8 the parameters of the matrix A are only dependent of the Jacobian matrix (16). 3.2 f(t, x (t), x(t), h) = Figure 9 : Zero-crossing of a current (16) through a semiconductor in A(t, x (t), x(t), h) x(t) - b(t) = 0 Spice. f x Multilevel modeling and simulation. Multilevel modeling [Duijsen, 1994] is a technique where different model descriptions can be combined. A multilevel simulation is done with the mathematical model of the multilevel model. A multilevel model can contain different types of models. For the modeling of a PCS the models in table 1 are selected. The ODE is combined with the DAE and during the simulation the computer code which is compiled from the Computer program instructions is executed. Model Mathematical model Circuit DAE, MNA Block-diagram ODE Computer program instructions Computer code for the simulation Table 1 : Multilevel model mathematical model and The multilevel modeling technique is advantageous compared to other modeling techniques for two major reasons. • • Each part of the implementation like the power electronic circuit, the load or the control, is described by its most efficient modeling technique. This allows a straightforward description without, for example, modeling an inverter in a block diagram or modeling a control algorithm by lumped circuit elements. Secondly, the simulation time can be decreased because each part of the implementation can be solved more efficiently. In [Duijsen, 1992] a comparison is made between SPICE and a multilevel simulation of a buck converter with PID controller. For SPICE the PID control is modeled by lumped circuit components. A switch model with the same parameters as used in the multilevel model replaced the semiconductor model in SPICE. The model for the diode in SPICE was simplified such, that it took only one or two recursive steps to reach convergence. In the multilevel approach the PID controller is described by an ODE. The multilevel simulation used less simulation time compared to the SPICE simulation. A reduction of the simulation time of two orders of magnitude was achieved in [Duijsen, 1992], because the simulation of the ODE requires less time than the simulation using the MNA method in SPICE. 4 Cyclic-steady-state analysis The known cyclic-steady-state methods are based on a state space formulation as given by (7). Instead of performing a simulation until all transients are damped, (7) is reformulated as a set of algebraic equations, from which the cyclic-steady-state solution is calculated directly. Cyclic-steady-state analysis of circuits containing periodically interrupted switches was first presented in [Liou, 1972]. In this method one transition matrix is derived for one time interval. The state vector at the end of this time interval should equal the state vector at the beginning of the time interval. From this equation the state vector is solved as function of the input vector. In [Lavers, 1986], [Cheung, 1986] and [Cheung, 1987] this method is extended to AC-AC switching power converters. A Basis Transformed State Space (BTTS) formulation is applied to describe time varying sources by a transition matrix as introduced in [Balbania, 1969]. In [Cheung, 1987] the cyclic-steady-state calculation is performed when the time intervals are varying due to state events occurring in the variables and events caused by the control. Here the Newton-Raphson algorithm is used to calculate the time interval for each transition matrix of the piece-wise linear circuit. For non-linear circuits a steady-state calculation may be performed as described in [Aprille, 1972] and [Colon, 1973] where the cyclic-steady-state solution is calculated using the Newton Raphson algorithm. The mathematical model has to have the following form: xend = f ( x begin) (17) where x contains the state variables. To calculate the cyclic-steady-state (17) is extended with: xend = x begin (18) xbegin - f ( xbegin) = 0 (19) transfer functions. However the averaging process assumes a piece-wise linear system and constant time intervals. Furthermore, the length of the time intervals has to be shorter than the time constants of the system. Averaging is applicable if the magnitude of the basic harmonic is much higher than the other harmonics of the waveform that has to be averaged. This is true for hard-switched DC converters where the basic harmonic is the DC component. For resonant converters the resonant waveforms consists of more than one harmonic with equal magnitude. Therefore averaging can not be applied to resonant converters. From the relation: xbegin is solved iteratively. In [Wong, 1987] the cyclic-steady-state of a closed loop regulated switched mode power supply is calculated. The mathematical relation for the closed loop is included in the total mathematical model. 5 Small-signal analysis In literature small-signal analysis is realized by two different approaches: 1. 2. averaging techniques, sampled data modeling. Averaging Averaging is studied extensively in literature [Middlebrook, 1976]. The motivation for this method is that it provides equations that can be solved analytically, providing expressions for Figure 10 : Approximation of a switched current (straight line), by its average (dashed line) and sampled data calculation (dots). An exception can be made for soft-switched converters [Lee, 1993], where the resonant waveform is only of interest during switching. The basic harmonic is still a DC component, so averaging can be applied, although the dynamics of the resonant circuit are not included in the averaged mathematical model.In figure 10 a waveform, being an inductor current in a chopper, is shown in combination with its averaged value, indicated by the dashed line. The dynamic behavior is indicated by the averaged value. The frequency spectrum of the original waveform differs from the frequency spectrum of the average waveform. The original waveform shows a high-frequency component, which could for example be caused by a periodically operating switch. The averaging process filters this frequency. Sampled data modeling The dots on the original waveform in figure 10, indicate the points which are calculated when using sampled data modeling. Sampled data modeling describes the propagation per cyclic time interval of the state variables of the PCS. The method is based on transition matrices with fixed-time intervals. A method based on a transient response obtained by simulation, is presented by [Maranesi, 1990]. The transient response is used to identify the parameters of a discrete state space model. A perturbation is imposed in the cyclic-steady-state and the deviation from the cyclic-steady-state after one cyclic time interval Tper is measured in a simulation: x([k + 1] Tper ) = A x(k Tper ) + B u(k Tper ) (20) In [Tymerski, 1991], fourier analysis of a piece-wise linear circuit is presented. The piece-wise linear circuit is described by a set of state equations, which are transformed to the frequency-domain. Although the derivation is complex, for simple circuit models the result can be presented in symbolic expressions. The method is based on a piecewise-linear state equation: x i (t) = Ai xi (t) + Bi ui (t) (21) i = 1, ..., n For each time interval Ti the solution x(t) is expressed as function of Ai, Bi and u(t): xi (t) = (t, Ai , Bi , xi (0), ui (t) ) Xi (j ) = xi (t) e - jt dt - ti - 1 t ti This expression is transformed to the frequency-domain by using the Fourier transform of (22): The result is an expression for Xi(j) in the frequency-domain for each time interval. The time-varying system (21) is approximated by [Tymerski, 1991]: X̂(j ) = y(k Tper ) = C x(k Tper ) + D u(k Tper ) For each simulation over a cyclic time interval of Tper, one of the entries of x or u is changed and the deviation of all other entries of x and y are measured. From the input u and the deviation of the state variables x and output y, the parameters of (20) are calculated. The number of simulations is equal to the sum of the number of state variables x and input variables u. The method is only applicable for the approximation of linear systems. (23) (22) 1 Tper x (t) e dt + ... + t 0 + T1 tn -1 + Tn 1 -j t t0 tn -1 x n (t) e - jt dt n Tper = Ti i =1 (24) where Ti are the time intervals of the piece- wise linear state equation (21). From the resulting expressionX (j), the transfer function between X(j) and U(j) is approximated via a kind of averaging given by the separate integrals for each time interval. The mathematical model (21) has constant parameters. 6 Conclusion Modeling The PCS contains components that can be modeled by different approaches, depending on the mathematical relations describing the component and the interconnection between Circuit Non-linear acausal mathematical relations : DAE Linear acausal mathematical relations : MNA Block diagram Non-linear causal mathematical relations : ODE Computer instructions Program language : Pascal, C++, 4GL, ASM, etc. Table 2 : Multilevel model with mathematical relations. incorporates the models as indicated in table 2. Simulation Simulation is performed with the mathematical model containing DAEs, MNA matrices, ODEs and computer code. It gives the time responses of all the time-varying variables in the mathematical model. Time-domain versus Frequency-domain The frequency-domain is limited in application for the modeling of PCSs, because of the timedomain dependency of the parameters and mathematical relations of the mathematical model. The frequency response only yields the steady state in the time-domain. Therefore the frequency-domain is not suited for a general analysis of a PCS. Cyclic-steady-state analysis Instead of performing the simulation until a steady state is reached, the cyclic-steady-state can be calculated directly. It requires however the knowledge of the periodicity of the PCS. Small-signal analysis Small-signal analysis is generally based upon averaging or sampled data modeling. The small-signal analysis is valid until half the switching frequency because of alaising effects. 7 Literature Aprille T.J., Trick T.N., Steady state analysis of nonlinear circuits with periodic inputs, Proceedings of the IEEE, vol 60, No 1, pp. 108-114, January 1972. Balbania N. Bickart T.A., Electrical Network Theory, New York: Wiley, 1969. the various components. The time-domain is preferred. A multilevel approach is suggested, which Bauer P., Duijsen P.J. van, Large signal and small signal modeling techniques for AC-aC power converters. Proceedings of PCCYokohama, IEEE, pp 520-525, 1993 Cheung R.W.-Y., Lavers J.D., A basis transformed state space formulation for the analysis of controlled rectifiers under ideal and non-ideal steady state conditions, IEEE Transactions on Power Systems, Vol PWRS-1, No 4, November 1986. Elbuluk M.E., Verghese G.C., Kassakian J.G., Sampled-data modeling and digital control of resonant converters, IEEE Transactions on Power Electronics, Vol PE-3, No 3, pp. 344354, July 1988. Franz G.A., Multilevel simulation tools for power converters, IEEE APEC CH28530/90/0000-0629, 1990. Cheung R.W.-Y., Lavers J.D., A basis transformed state space formulation for the computer aided design of power electronic circuits and systems, IEEE CH2499-2/87/0000946, pp. 946-953, 1987 IEEE. Groves J.O., Small-signal analysis using harmonic balance methods, IEEE Power Electronics Specialists Conference, 1991, pp 74-79. Colon F.R., Trick T.N., Fast periodic steadystate analysis for large signal electronic circuits, IEEE Journal of solid state circuits, Vol. SC-8, No 4, pp. 260-269, August 1973. Ho C-W, Ruehli A.E., Brennan P.A., The modified nodal approach to network analysis, IEEE Transactions on Circuits and Systems, Vol CAS-22, No 6, pp. 504-509, june 1975. _uk S., Middlebrook R.D., A general unified approach to modeling switching dc-dc converters in discontinuous conduction mode, Proceedings PESC 1977, p.36-57 Hui, S.Y.R., Christopoulos, C., Non-linear transmission-line modelling technique for modelling power electronic circuits, EPE 1991 Dirkman R.J., The simulation of general circuits containing ideal switches, IEEE 02759306/87/0000-0185, 1987 IEEE. Duijsen P.J. van, Multilevel modeling and simulation of electronic circuits and systems, ED&PE conference September 1992, CSFR, pp. 156-161, 1992. Duijsen P.J. van, Multilevel modeling and simulation of power electronic systems, Proceedings EPE Brighton, England 1993. Duijsen P.J. van, Multilevel modeling and simulation of power electronic converters and drive systems, Proceedings Power Conversion and Intelligent Motion (PCIM), 1994. Hui S.Y.R., Christopoulos C., Computer simulation of converter-fed DC drive using the transmission-line modeling technique, IEEE, Transactions on Power Electronics, Vol PE-6, No 4, October 1991. Huliehel F., Ben-Yaakov S., Low frequency sampled data models of switched mode DCDC converters, IEEE Transactions on Power Electronics, Vol 6, No 1, pp. 55-61, Jan 1991. Kassakian J.G., Schlecht M.F., Verghese G.C. Principles of Power electronics, AddisonWesley Publishing Company,1991 Kelkar S.S., Lee F.C.Y., A fast time domain digital simulation technique for power converters: Application to a buck converter with feedforward compensation, IEEE Transactions on Power Electronics, Vol. PE-1, No 1, pp. 21-31, Jan 1986. Lavers J.D., Jin H., Cheung R.W.Y., Analysis of power electronic circuits with feedback control: a general approach, IEE Proc., Vol. 137, Pt.B, No 4, July 1990. Lavers J.D., Cheung R.W.-Y., A software package for the steady state and dynamic simulation of induction motor drives, IEEE Transactions on Power Systems, Vol PWRS-1, No 2, May 1986. Lee E.S., Wilson T.G., Electrical design inspection: A methodology for using circuit simulation in the design and development of electronic power supplies, IEEE Pesc 1992. Liou M.L., Exact analysis of linear circuits containing periodically operating switches with applications, IEEE Transactions on circuit theory, Vol. CT-19, no 2, pp. 146-154, March 1972. Luciano A.M., Strollo A.G.M., A fast timedomain algorithm for the simulation of switching power converters, IEEE Transactions on Power Electronics, Vol 5, No 3, pp. 363-370, July 1990. Middlebrook R.D., _uk S., A general approach to modelling switching-converter power stages, Proceedings PESC 1976, pp 18-31 Nagel, L.W., Spice2: A computer program to simulate semiconductor circuits, Memorandum No. UCB/ERI M520, University of of California, Berkeley, 1975 Nakahara M., Ninomiya T., A general computer algorithm for analysis of switching converters, IEEE Pesc 1992. Nakhla M.S., Vlach J., A Piecewise Harmonic Balance Technique for Determination of Periodic Response of Nonlinear Systems, IEEE Transactions on Circuits and Systems, Vol CAS-23, NO 2,pp 85-91, February 1976 Nelms R.M., Reid B.B., Grigsby L.L., Simulation of power converter devices with nonlinear elements, Simulation, December 1989. Nelms R.M., Grigsby L.L., Simulation of power electronic circuits containing nonlinear inductances using a sampled-data model, Apec IEEE, CH2853-0/90/0000-0746, pp. 746-749, 1990. Nelms R.M., Lollar F.L., Grigsby L.L., State variable analysis of dc-dc converters, Simulation, February 1988. Revankar G.N., Topological approach to thyristor-circuit analysis, Proc. IEE, Vol.120, No 11, November 1973. Rim C.T., Hu D.Y., Cho G.H., Transformers as Equivalent Circuits for Switches: General Proofs and D-Q Transformation-Based Analysis, IEEE Transactions on Inducstry Applications, Vol 26, No 4, July/August 1990 Sanders S.R., Noworolski J.M., Liu X.Z., Verghese G.C., Generalized averaging method for power conversion circuits, IEEE Transactions on Power Electronics, Vol 6, No 2, pp 251-259, April 1991. Sankara Rao K., Swamy N.S., Rajagopalan V., Topological Model for a Three-Phase Converter, IEEE Transactions on Industrial Electronics and Control Instrumentation, pp. Nov 1975. Schwarz A.F., Computer-aided design of microelectronic circuits and systems, Vol 1, Academic press 1987. Tymerski R., Frequency analysis of timeinterval-modulated switched networks, IEEE Transactions on Power Electronics, Vol 6, No 2, pp 287-295, April 1991. Vergese G.C.,Elbuluk M.E.,Kasakian J.G., A general approach to sampled data modeling for power electronic circuits, IEEE Transactions on Power Electronics, 4/1986, p.76-87 Wong R.C., Owen H.A., Wilson T.G., An efficient algorithm for the time-domain simulation of regulated energy-storage DC-toDC converters, IEEE Transaction on Power Electronics, Vol PE-2, No 2, pp. 154-168, April 1987. Wong R.C., Accelerated convergence to the steady state solution of closed loop regulated switching mode systems as obtained through simulation, IEEE 0275-9306/87/000-0682, pp. 682-692, 1987 IEEE. Yang E.X., Guo L., Lee F.C., Describing function method in modeling of switching converters, Proceedings Virginia Power Electronics Center (VPEC) Seminar, 1993 Zadeh L., Frequency analysis of variable networks, IRE Proc., Vol 38, pp 291-299, 1950