Modeling tumour progression and invasion using spatial
advertisement

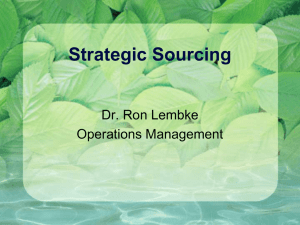
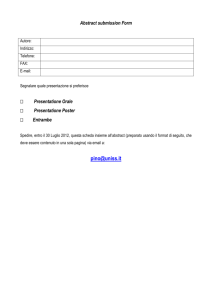
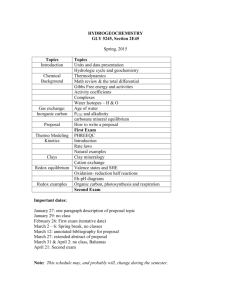
Modeling tumour progression and invasion using spatial evolutionary games James Gui, Spencer Sheen August 16, 2013 Abstract Tumor progression has been a topic for extensive exploration in the field of computational biology. Numerous models have been proposed for the growth of different kinds of tumors, such as ones based on cellular automata [6] and evolutionary game theory [3]. Here, we explore the spatial aspect of tumors that was neglected in Basanta’s game between three different tumor cell phenotypes in gliomas–autonomous growth (AG), invasive behavior (INV), and glycolytic production (GLY). We use two different approaches to modeling this spatial component, one based on a discrete continuous model and one based on a two-dimensional lattice simulation model. 1 Introduction In general, cancer cells display an increased reliance on glycolysis for energy production, a phenomenon known as the Warburg effect [4]. These cells will utilize glycolysis even in an oxygen-rich environment–normal cells in such an environment would use the Krebs cycle in addition to glycolysis in order to more efficiently generate ATP. The Krebs cycle, also known as the citric acid cycle, takes pyruvate (a byproduct of glycolysis) and converts it into ATP using oxygen. Regular cellular respiration can produce up to 38 molecules of ATP, which is 19 times what glycolysis alone can produce. Furthermore, the glycolytic cells are able to change the acidity of the area around them, causing normal cells to undergo programmed cell death. In our study, we analyze the game between two other phenotypes and the glycolytic phenotype to discover what role the GLY cells play in tumor progression and invasion. The first of these phenotypes is the AG phenotype, which in essence describes a cell that acts independently of what the body tells it to do. This phenotype is seen in benign (or primary) tumors, and are characterized by uncontrolled proliferation. The second phenotype is the INV phenotype, which is characterized by increased cell motility. The possession of this phenotype allows cancerous cells to invade and become malignant tumors. Usually, this happens when some tumor cells move from the original tumor to another organ or tissue and form another tumor, known as 1 a metastasis. These cells generally work their way through the bloodstream to create metastases in different areas of the body. The evolutionary game between AG, INV, and GLY has already been analyzed, but the analysis done so far neglects an important aspect in the tumor: space [3]. We hope to enhance our understanding of tumor cell behavior through creating and analyzing the game with a spatial component. 2 The Discrete Continuous Model We assume that all tumors have some percentage of GLY cells and consider three types of tumors in our simulations: one with a random distribution of AG, INV, and GLY cells, one with a high percentage of AG cells everywhere except for a corner with high INV, and one with a high percentage of GLY cells everywhere except for a corner with high INV. We will discuss first the discrete continuous model (which uses a partial differential equation (PDE) that is discretized in two dimensions) and then discuss our cellular automaton (CA) model which models the game on a 10 by 10 grid but uses a different method of changing the morphology of the tumor. These simulations use the same payoffs described in the Basanta model, but include the spatial aspect of tumors. We begin with the payoff matrix in the game between the three phenotypes. The full payoff in an interaction between two cell is represented by 1, while the different parameters c, n, and k denote the benefits and costs of interaction. Parameter c is the cost in motility of the INV cells. Parameter n represents both the cost for an AG cell to live near a GLY cell due to the GLY cell increasing acidity in the area and the benefit for a GLY cell to increase the acidity of the environment. Finally, parameter k represents the cost of using the less efficient glycolytic metabolism. AG AG INV GLY 1 2 1 2 1−c +n−k IN V 1 1 − 2c 1-k GLY 1 2 −n 1−c 1 2 −k Table 1 displays the payoffs for the interaction between the cell on the left and the cell on the top. For example, the payoff gained by and AG cell interacting with another AG cell is 12 because they share resources. When an INV cell interacts with anything besides an INV cell, it gains the base payoff minus c because it moves to another location. When the GLY cell interacts with the AG cell it share the resources and gains fitness for changing the environment, but loses k because of its glycolytic metabolism. We then replicate the results shown by Basanta et al. with the following system of ordinary differential equations (ODEs): dy = y.(Ay − y T Ay) dt (1) where A is the payoff matrix in Table 1 and y is a 3 by 1 vector with the population fractions of the AG, INV, and GLY cells going from top to bottom. 2 The sum of the elements in y must be 1, and the period represents element-wise multiplication. Plot of Population Fractions over Time 0.9 AG INV GLY 0.8 Population Fractions 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 50 100 Time Step 150 200 Figure 1: This graph shows how the population fractions change as time goes on with the parameters c = .5, n = .4, and k = .2. Inputting various values for each parameter in both our original ODE model and the Basanta model returned similar outputs. For example, the parameter values c = .5, n = .4, and k = .2 (later discussed as our “baseline” parameters) returned a steady state of 18.75% AG, 50% INV, and 31.25% INV, the same as seen in Basanta’s model if we plug the values of c, n, and k into the equations in the paper. These equations are p = 1 − nk and p′ = 2kn+k−ck−cn , where p 2n2 is the population fraction of INV cells and p’ is the population fraction of AG cells [3]. Thus, our results from the ODE model are the same as the results gleaned from the Basanta model: conditions favoring GLY cells also promote the proliferation of INV cells. 2.1 The One-Dimensional Model Now, we proceed to incorporating the spatial aspect of the game. We first do this in one dimension by making the interactions take place in ten spatial “cells” in a line. Each spatial “cell” has its own morphology of the three tumor phenotypes. Furthermore, the “cells’ individual morphologies affect those of the cells directly adjacent to them. In essence, each spatial “cell” tries to match their morphologies with the “cells” next to them. The rate at which this occurs is denoted by a diffusion constant a. By multiplying the diffusion constant to the Laplacian matrix of the 1 by 10 grid, we can model our original ODE with a 3 one-dimensional spatial aspect. We can think of the new equation as a reactiondiffusion equation, with the original ODE being the reaction component and the Laplacian matrix being the diffusion component [5]. The following simulations are run with “baseline” parameters c = .5, n = .4, and k = .2 and a random initial condition. Plot of INV Population in Cell r at Time t Plot of AG Population in Cell r at Time t 0.8 1 0.6 Population Population 0.8 0.6 0.4 0.4 0.2 0.2 0 0 0 0 10 20 8 6 40 Time Step 10 20 8 60 0 6 40 4 2 60 Time Step Cell # (a) AG populations 4 2 0 Cell # (b) INV populations Plot of GLY Population in Cell r at Time t 0.8 Population 0.6 0.4 0.2 0 0 10 20 8 6 40 Time Step 4 60 2 0 Cell # (c) GLY populations Figure 2: These figures depict the steady states in each point on the line. 2.2 The Two-Dimensional Model Finally, we move on to the spatial game in two dimensions. This time, the game is played on a 10 by 10 grid, with each spatial “cell” trying to match its morphology with the “cells” directly above, below, to the left, and to the right of it. Although the process of applying the diffusion constant to the Laplacian and solving the ODE is similar in the two-dimensional and one-dimensional cases, the Laplacian matrix in the two-dimensional game is much more complicated to compute. Furthermore, the plot of our results is difficult to interpret if we use the same graph that we did in the one-dimensional case because the cell numbers are labelled 1 to 100 but are in a 10 by 10 grid instead of a 1 by 100 grid 3. 4 Plot of AG Population in Cell r at Time t Plot of INV Population in Cell r at Time t 0.8 0.7 0.6 0.8 0.6 0.4 Population Population 0.5 0.3 0.2 0.4 0.2 100 0.1 0 0 100 50 −0.2 50 0 Cell # 0 50 150 100 300 250 200 0 50 100 150 200 Time Step Time Step (a) AG populations 250 300 0 Cell # (b) INV populations Plot of GLY Population in Cell r at Time t 1 Population 0.8 0.6 0.4 100 0.2 80 0 0 60 50 40 100 150 20 200 250 Time Step 300 0 Cell # (c) GLY populations Figure 3: Each point on the 10 by 10 grid is numbered from 1 to 100, and these graphs display the steady states in each numbered point. The simulations are run with baseline parameters and an initial condition of 80% AG and 20% GLY everywhere except for the corner with 80% INV and 10% everything else. This initial condition models the invasion from a specific point in the tumor. As these graphs may be difficult to interpret, we included another visualization which plots the populations at each location on the 10 by 10 grid, with the x- and y-axes representing locations on the grid. However, we could not plot the solution against time with this method, so the population at time steps 100, 200, and 300 are shown. 5 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0.2 0 10 0 10 10 10 8 5 0 10 8 5 6 8 5 6 4 6 4 2 0 0 (a) Time Step 100 4 2 0 0 (b) Time Step 200 2 0 (c) Time Step 300 Figure 4: AG cell populations on the 10 by 10 grid 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0.2 0 10 0 10 10 10 8 5 0 10 8 5 6 8 5 6 4 6 4 2 0 0 (a) Time Step 100 4 2 0 0 (b) Time Step 200 2 0 (c) Time Step 300 Figure 5: INV cell populations on the 10 by 10 grid 1 0.8 1 1 0.8 0.8 0.6 0.6 0.4 0.4 0.6 0.4 0.2 0.2 10 0.2 0 10 0 10 10 8 5 6 10 8 5 6 4 0 2 0 (a) Time Step 100 10 8 5 6 4 0 2 0 (b) Time Step 200 4 0 2 0 (c) Time Step 300 Figure 6: GLY cell populations on the 10 by 10 grid Incorporating the spatial aspect to the ODE model produced steady states that were similar to the ones produced by the original ODE, and it also changed how the population fractions of each cell reached the steady state. For instance, choosing a higher diffusion constant made the cells reach their steady states much faster. This happens because cells near each other achieve the same morphology more quickly, making the entire tumor reach the same steady state at a higher rate. 6 3 The Cellular Automaton Model Like the Discrete Continuous Model, the Cellular Automaton Model runs on a 10 by 10 grid. However, this model runs differently using the same base parameters c=0.5, n=0.4, and k=0.2. The Cellular Automata Model works in four steps. The first step is to initialize all the cells on the grid. This will assign each cell to a certain type: Autonomous, Invasive, or Glycolytic cells. In our case, there are three main types of initial conditions. They will be explained more in detail in the results section. The next step is the find the fitness value for each cell on the board. It is calculated by the sum of the fitness payoff of every adjacent cell to obtain the fitness of the center cell. The payoff is calculated by using the table in the Bastanta model. For example, to calculate the center AG cell, you would need to add the sum of all the payoff values based on the aforementioned payoff matrix. The third step is to decide which cells need to be updated. Each cell has a 10 percent chance of being updated. You can see this process in the truefalse table. True represents the cells that need to be updated, and they are highlighted in yellow. 7 The final step is to update each cell. In this process, the neighboring cell with the highest fitness value will replace the old cell. This is how certain cells can change type (autonomous to invasive or invasive to glycolytic). Once the final step is finished, a full generation has been created. Steps 2 through 4 will be repeated to create future generations. 4 Results Both the Discrete Continuous Model and the CA model used the payoff matrix that Basanta created, but they returned different outputs. Because tumors always have a percentage of GLY cells present, we chose a set of “baseline” parameters that returned a steady state with a sizable GLY cell population. Thus, the values we chose to conduct simulations for different initial conditions and treatments were as follows: c = .5, n = .4, and k = .2. The steady state that the original ODE model produces is 18.75% AG, 50% INV, and 31.25% INV. With these parameters, we will run simulations of both the continuous model and the CA model with three different initial conditions and explore how the morphology of the tumor changes. Finally, we will simulate treatments by running the simulations with changed parameters. To simply the process, the same initial condition will be used in each of the treatment simulations, and the diffusion constant will be assumed to be .01. Furthermore, we assume that the treatment is spatially homogeneous–that is, the change in parameters will occur in every “cell” of the 10 by 10 grids. 4.1 The Discrete Continuous Model We will first explore the results of the continuous model. Running the simulation with a random initial condition returned the steady state in 50 time steps. The steady state from the random initial condition was 20.21% AG, 48.96% INV, and 30.83% GLY. We ran the next simulation with 80% AG cells, no INV cells, and 20% GLY cells in every spatial “cell” of the 10 by 10 grid except for a corner with 10% AG cells, 80% INV cells, and 10% GLY cells. We found that the population fractions of each phenotype, when visualized in a 10 by 10 grid, exhibited a wave-like pattern extending from the corner with the INV cells before settling into a steady state. Furthermore, a large increase in GLY cells was immediately followed by a large increase in INV cells, suggesting that the INV phenotype can invade more easily in a tumor with almost exclusively GLY cells. The average of each population fraction at 300 time steps was 18.58% AG, 8 50.09% INV, and 31.33% GLY. This initial condition took much longer to reach the steady state, almost six times the time steps it took to reach the steady state from a random initial condition. We have already provided visualization of this simulation in Figures 4 through 6 4. We ran the final simulation with 20% AG cells, no INV cells, and 80% GLY cells in every spatial “cell” of the grid except with a corner with 10% AG cells, 80% INV cells, and 10% GLY cells. As expected, the simulation was similar to the one with mostly AG and INV in a corner, producing a wave-like pattern emanating from the corner with the high INV concentration. However, this simulation essentially starts at a ”later” point of the second simulation, since GLY is already high. Because of this fact, the steady state for this initial condition is the same as that of the second simulation. 4.1.1 Treatments Next, we ran simulations of treatments that would change one parameter, in order to discover ways to prevent the INV phenotype from invading. We ran these simulations with only one initial condition (where AG is high everywhere except for a corner with high INV) to simplify analysis. By running the simulation with three different c values (.6, .65, .7) and baseline n and k values, we explored the effect that a treatment increasing the cost of motility would have on the tumor’s morphology. The treatment simulated when we change this parameter is one that can increase the cell-cell adhesion in the tumor, therefore increasing the cost in motility. At c = .6, the tumor’s final steady state was half INV and half GLY. Again, the INV phenotype remained low until the GLY phenotype became predominant, at which point the INV phenotype increased its population fraction to 50%. It took about 300 time steps to reach this steady state. The wave-like pattern seen before is also present in this scenario, likely because of the initial condition. It took about 300 time steps to reach this steady state. At c = .65, the steady state took 250 time steps to reach. The final morphology was 28.39% INV and 71.61% GLY. This time, the GLY cells spent much longer as the predominant cell type (over 90%) in the tumor before it ceded to the INV phenotype. 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0.2 0 10 0 10 0 10 10 8 5 6 6 4 0 2 0 (a) Time Step 100 10 10 8 5 8 5 6 4 4 0 2 0 (b) Time Step 200 0 2 0 (c) Time Step 250 Figure 7: INV cell populations on the 10 by 10 grid when c = .65 9 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0.2 0 10 0 10 10 8 5 6 8 5 6 4 0 2 0 (a) Time Step 100 10 10 8 5 6 4 4 0 2 0 (b) Time Step 200 0 2 0 (c) Time Step 250 Figure 8: GLY cell populations on the 10 by 10 grid when c = .65 Finally, at c = .7, the GLY phenotype took over the entire tumor relatively quickly–a little over 50 time steps. From this result, it seems that if the cost of motility is too high, the GLY phenotype will invade as long as n is greater than k (as in this scenario the GLY cells have the highest relative fitness). Since GLY cells are also seen in many malignant tumors, we deem this type of treatment not as desirable as one that helps AG cells atke over the tumor.Curiously enough, if the cost of motility is actually lowered, the GLY phenotype invades for a certain period of time, then becomes almost nonexistent. The AG and INV cells then take up most of the tumor, with the INV to AG ratio becoming larger as c becomes smaller. For example, at c = .4, the final steady state at 300 time steps was 37.40% AG, 50.10% INV, and 12.50% GLY. This probably happens because the INV cells become predominant when c is low, making the fitness advantage that the GLY cells have less effective (the INV cells are not affected by the lowered pH of the local microenvironment because they move away from other cells when they interact). The next parameter we changed to simulate treatments was n, in order to make the GLY cells less fit to survive. We make c = .5 and k = .2, and run the simulations with n = .3, .2. This represents a treatment that increases the pH in the tumor microenvironment in order to eliminate the advantage GLY cells receive when they change pH through glycolysis. In all of the following simulations, the wave-like pattern is observed, because of the initial condition. At n = .3, the AG phenotype becomes more fit, so its population fraction increases. The final steady state is 38.51% AG, 33.58% INV, and 27.91% GLY.At n = .2, we see a dramatic change in the steady state. It takes around 250 time steps to reach this steady state at every point in the 10 by 10 grid, and there is a very noticeable increase in AG cells. The steady state is 95.78% AG, 2.78% INV, and 1.44% GLY, which is almost exclusively AG cells. Because the tumor changes from having an equal distribution of the phenotypes to having mostly AG with such a small change in the parameter n, we hypothesize that changing the microenvironment to favor GLY less is an effective treatment for tumors. 10 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0.2 0 10 0 10 10 10 8 5 0 10 8 5 6 8 5 6 4 6 4 2 0 0 (a) Time Step 100 4 2 0 0 (b) Time Step 200 2 0 (c) Time Step 250 Figure 9: AG cell populations on the 10 by 10 grid at n = .2 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0.2 0 10 0 10 10 8 5 8 5 6 8 5 6 4 0 10 10 6 4 4 2 0 0 (a) Time Step 100 2 0 0 (b) Time Step 200 2 0 (c) Time Step 250 Figure 10: INV cell populations on the 10 by 10 grid at n = .2 1 1 1 0.8 0.8 0.8 0.6 0.6 0.6 0.4 0.4 0.4 0.2 0.2 0 10 0 10 0.2 0 10 10 8 5 6 10 8 5 6 4 0 2 0 (a) Time Step 100 10 8 5 6 4 0 2 0 (b) Time Step 200 4 0 2 0 (c) Time Step 250 Figure 11: GLY cell populations on the 10 by 10 grid at n = .2 Lastly, we explore the efficacy of a combination of the two treatments by setting c to .65 and n to .2. At our original initial condition, the average population fractions appear to be 80.09% AG and 19.91% GLY. However, at a random initial condition, the average population fractions is 76.35% AG and 23.65% GLY. This is an example of the spatial model returning different steady states with different initial conditions, something we cannot see with the regular ODE model. 11 4.2 The Cellular Automaton Model In the CA model, we ran the simulation using the same baseline parameters: c=0.5, n=0.4, and k=0.2. The results are calculated based on an average of 5 simulations. Each simulation consists of 50 generations. During each simulation, there are three different initial conditions. The first condition is where all the cells are randomly generated in different parts of the grid. The next condition is when the grid is filled with about 2/3 autonomous cells, 1/3 glycolytic cells, and 4 invasive cells in the bottom right hand corner. The final condition is the same as the second condition except that there are 2/3 glycolytic cells and 1/3 autonomous cells. When the grid was randomly initialized, the simulation averaged out to be 22.8% AG, 72.4%INV, and 4.8%GLY. When the grid had 2/3 Autonomous cells with Invasive Cells in a corner, on average, there were 5.6% AG, 51.6% INV, and 42.8% GLY. Finally, when there were 2/3 Glycolytic cells with Invasive Cells in a corner, there averaged to be 1.6% AG, 49% INV, and 49.4% GLY. 4.2.1 Treatments Like the Discrete Continuous Model, we ran a series of treatments to prevent the Invasive cells from spreading throughout the grid. We dud this by changing parameters ”c” and ”n” one at a time. We started by changing the value of parameter ”c” from 0.5 to 0.65 and 0.7. This increases the motility cost for invasive cells, making it cost more fitness for them to move around. As a result, the loss of invasive cells will be replaced by more autonomous and glycolytic cells. When the cells were randomly generated, there were 15.4% AG, 78.4% INV, and 6.2% GLY when c=0.65. There were 10.6% AG, 82% INV, and 7.4% GLY when c=0.7. The graph for this simulation is displayed below. When there were 2/3 Autonomous cells and Invasive cells in a corner, there were 0.6% AG, 37.6% INV, and 61.8% GLY when c=0.65. There were 2.4% AG, 37% INV, and 60.6% GLY. When there were 2/3 Glycolytic cells and Invasive cells in a corner, there were 1.6% AG, 42.4% INV, and 56% GLY when c=0.65. There were 0.2% AG, 43.2% INV, and 56.6% GLY. 12 Another treatment we used was to lower the ”n” parameter from 0.4 to 0.3 and 0.2. The treatment will decrease the cost of fitness for glycolytic cells to produce energy resulting in more glycolytic cells. When the cells were randomly generated, there were 20.6% AG, 77.8% INV, and 1.6% GLY when n=0.3. There were 5.4% AG, 94.6% INV, and 0% GLY when n=0.2. When there were 2/3 Autonomous cells and Invasive cells in a corner, there were 4.2% AG, 45% INV, and 50.8% GLY when n=0.3. There were 3.2% AG, 42.6% INV, and 54.2% GLY when n=0.2. 13 When the cells were randomly generated, there were 0.4% AG, 48.8% INV, and 50.8% GLY when n=0.3. There were 1.2% AG, 50.2% INV, and 48.6% GLY when n=0.2. 4.3 4.3.1 Analysis Randomly Generated Cells When the cells were randomly generated, there were mostly Invasive cells, even when the treatments were made. This is largely because the grid had 1/3 invasive cells in comparison to the 1/25 invasive cells in the other grid formats. In other words there were more invasive cells and it was easier for the cancer cells to spread throughout the grid. Also, when ”n” was decreased, 95% of the grid was Invasive cells. This is due to the fact that Invasives can easily take over the large number of glycolytic cells. In conclusion, the treatments didn’t work with the randomly generated cells because there still was a very large percentage of Invasive cells. 4.3.2 2/3 Autonomous Cells and Invasive Cells in a Corner Unlike the randomly generated cells, both treatments mostly worked. However, there was a low number of Autonomous cells, so it wasn’t a 100% cure. The invasive cells went down making the Glycolytic cells the largest percentage of 14 cells in the grid. This is because it is a lot harder for the Invasive cells to take over the high number of Autonomous cells in the beginning of the simulation. Eventually, the Glycolytic cells replaced the Autonomous cells making it easier for Invasive cells to spread. 4.3.3 2/3 Glycolytic Cells and Invasive Cells in a Corner For this scenario, the treatments weren’t as effective. However, the percentage of Invasive cells still went down, but it was only by about 7%. The treatments didn’t work as much due to the large number of Glycolytic cells. This made it easier for Invasive cells to spread around the grid. The Glycolytic cells still took over the Autonomous cells and still managed to take up half of the grid. 4.4 Differences Between the Two Models The two models differ greatly in their implementation, and as such the results from each model also differ. While the discrete continuous model has population fractions in each space of the 10 by 10 grid, the CA model has a single phenotype in the spaces. Because of this fact, the results from the CA model are more stochastic. In addition, the discrete continuous model is “larger” in scale than the CA model because of the way it is implemented. We can think of each space of the discrete continuous model’s 10 by 10 grid as a CA grid, since it deals with population fractions as opposed to single cells. Finally, in the CA model the cells with the lowest fitness will completely die out, whereas in the continuous model, most cells with lower fitness will simply be at a lower population fraction. This is due to the updating system used in the CA model–if one cell loses, even by the tiniest fitness value, it will be replaced. 5 Conclusions Our continuous model supports the hypothesis set forth by D. Basanta: a switch to glycolysis for energy production in tumor cells makes invasive phenotypes more likely to invade [3]. When we ran the simulations, a dominance of GLY in the tumor always preceded an INV cell takeover. Furthermore, when the parameters were set to give GLY cells a fitness advantage, the INV phenotype was able to displace the AG cells. This happened most likely because the GLY cells would make the environment unfit for AG cells, making room for the INV cells to invade. The continuous model returned similar results to those seen in Basanta’s model, but with slightly different steady states. We believe that our use of diffusion with a Laplacian matrix is an effective method of incorporating space into previously explored models. Other models have used similar systems of partial differential equations to model tumor growth, but this is one of, if not the first model that melds evolutionary game theory with a reaction-diffusion model [1]. The continuous model of tumor progression is still quite simple, however, since we generalize the types of tumors (gliomas) and the types of 15 cells in those tumors. To refine our model, we could find parameters with a stronger biological basis as our “baseline” parameters. Such parameters would reflect the tumor’s growth more realistically and enhance our ability to produce results seen in experiments. In addition, we assume that treatments and parameters are spatially homogeneous–if we could instead have these parameters change as different morphologies are considered, the model would become more realistic. Having treatments “diffuse” across the tumor would provide an enriched simulation of actual therapy. Finally, we have not yet explored the biological significance of the time steps, i.e. what each time step actually means in units. This is because the MatLab command (ode45) that we used to solve the ODE system chooses time steps on its own. Furthermore, our cellular automata model produced different results from the continuous model, and did not seem to match results in past models [2]. We hope to refine the updating system and grid so that the results will be more akin to what we expect. Despite its shortcomings, the cellular automata model gave us an invaluable new visualization of the tumor. References [1] E. L. Newman R. J. C. Steele A. M. Thompson A. R. A. Anderson, M. A. J. Chaplain. Mathematical modelling of tumour invasion and metastasis. Journal of Theoretical Medicine, 2:129–154, 1999. [2] Alsner J. Bach L. A., Sumpter D. J. T. and Loeschcke V. Spatial evolutionary games of interaction among generic cancer cells. Journal of Theoretical Medicine, 5:47–58, 2003. [3] Hatzikirou H. Basanta D., Simon M. and Deutsch A. Evolutionary game theory elucidates the role of glycolysis in glioma progression and invasion. Cell Proliferation, 41:980–987, 2008. [4] Warburg O. The metabolism of tumors. 1930. [5] Steven J. Ruuth. Implicit-explicit methods for reaction-diffusion problems in pattern formation. Journal of Mathematical Biology, 34:148–176, 1995. [6] Salvatore Torquato Yang Jiao. Emergent behaviors from a cellular automaton model for invasive tumor growth in heterogeneous microenvironments. Plos Computational Biology, 7:1–14, 2011. 16