9 Lecture 9: Damped harmonic motion
advertisement

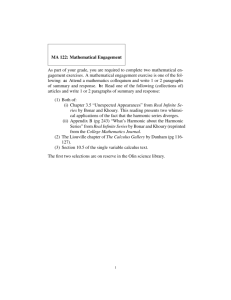
Mathematics for Physics 3: Dynamics and Differential Equations 9 56 Lecture 9: Damped harmonic motion In the previous lectures we considered in some detail the example of a pendulum in the small angle approximation, and then analysed periodic motion in a more general potential. What is common to all oscillation examples considered so far is that the total mechanical energy is conserved. We now drop this assumption and analyse the case of an oscillating system that is dissipating its energy. In the next lecture we will consider in addition a time dependent force. Both these lectures serve as an introduction to the subject of linear second order differential equations. Damped harmonic motion Let us consider a one-dimensional oscillator, such as a spring with a Hooke’s constant k, Felastic = −kx, which also has a linear friction Ffriction = −µẋ, which is always against the direction of motion. The equation of motion is: mẍ = −kx − µẋ Dividing by m we can bring the equation of motion into the following standard form: � k 1µ 2 ẍ + 2λẋ + ω x = 0, ω= , λ= , m 2m (157) (158) where λ as well as ω are positive. A similar equation can be obtained for a pendulum at small angles and many other systems near equilibrium, where now we do not neglect the damping force. We observed that (158) is a second order linear ordinary differential equation with constant coefficients. Moreover, this equation is homogeneous: it can be written using a differential operator as follows: Ô [x(t)] = 0 where Ô = d2 d + 2λ + ω 2 . 2 dt dt Linear homogeneous equations have the property of superposition, namely that if x1 (t) and x2 (t) are solutions, namely Ô [x1 (t)] = 0 and Ô [x2 (t)] = 0, then also any linear combination of x1 and x2 is a solution: � � Ô ax1 (t) + bx2 (t) = 0 . Moreover second order equations have two linearly independent solutions (they involve two constants of integration), so if we found two such linearly independent solutions, ax1 (t) + bx2 (t) is in fact the most general solution. For the case of constant coefficients we may find the independent solutions by using a trial function of the form: x(t) = eα t (159) Inserting this into (158) we get the following characteristic equation: α2 + 2λα + ω 2 = 0 whose roots are: α1,2 = −λ ± � λ2 − ω 2 (160) Thus, assuming that ω �= λ we obtain two distinct solutions, and our general solution is x(t) = aeα1 t + beα2 t According to (160) the motion is qualitatively different in the following three situations: • λ > ω: over-damping • λ < ω: under-damping • λ = ω: critical damping We now analyse them one by one. (161) Mathematics for Physics 3: Dynamics and Differential Equations 57 Over-damped harmonic motion If λ > ω we have two distinct real negative roots � α1 = −λ + λ2 − ω 2 α2 = −λ − so the most general solution is √ � λ2 − ω 2 (162) √ 2 2 2 2 x(t) = ae−(λ− λ −ω )t + be−(λ+ λ −ω ) t � � √ √ 2 2 2 2 = e−λt ae+t λ −ω + be−t λ −ω � � � � � � �� = e−λt A cosh t λ2 − ω 2 + B sinh t λ2 − ω 2 (163) We note that both exponentials tend to zero at large times. There is no oscillation at all: the damping is sufficiently fast that the oscillatory motion is not observed. The constants of integration a and b, or alternatively A and B, should be fixed based on the initial conditions. Under-damped harmonic motion If λ < ω we have two distinct complex roots, which are complex conjugates of each other: � � α1 = −λ + i ω 2 − λ2 α2 = −λ − i ω 2 − λ2 (164) so the most general solution is √ √ 2 2 2 2 x(t) = ae−(λ−i ω −λ )t + be−(λ+i ω −λ ) t � � � � � � �� = e−λt A cos t ω 2 − λ2 + B sin t ω 2 − λ2 , (165) where the second expression is more natural if x(t) (and thus A and B) is real, as is indeed the case in classical mechanics. We now observe that oscillations are present. The damping exponential e−λt suppresses the amplitude of the oscillations. Figure 11: Examples of an over-damped and an under-damped harmonic motion. In the latter case we also show the enveloping amplitude. Critically-damped harmonic motion Finally consider the case where the two roots become degenerate, i.e. λ = ω, so α1 = α2 = −λ . Now the two exponentials eα1 t = e−λt and eα2 t = e−λt are clearly not linearly independent, so we have just one of the two functions in the general solution. The other is provided by t e−λt . In other words, our claim is the general solution of ẍ + 2λẋ + λ2 x = 0, (166) is x(t) = (a + bt) e−λt (167) As can be readily verified by substitution. Similarly to the over-damped oscillator, no oscillations are observed, just monotonous damping.