Chapter 1: Introduction
advertisement

1
Chapter 1: Introduction
This document describes a set of scattering tools which were developed by Jon W. Wallace at
Brigham Young University to solve electromagnetic scattering problems. The tools contain the
following basic elements:
1. 2D/3D FDTD Simulator
2. 2D Dielectric Waveguide Mode Solver
3. Discrete Ordinate Radiative Transfer Sovler for Layered Media
1 Compilation
The following libraries
UNIX architectures:
Library
Version
binutils
2.8.1
egs w/ g77 1.0.3
gmake
3.76.1
octave
2.0.14
gdb
4.17
byacc
flex
sed
2.05
(not included with the tools) are required to compile the tools on
Download Location
ftp://egcs.cygnus.com/pub/egcs/
ftp://ftp.che.wisc.edu/pub/octave/
ftp://metalab.unc.edu/gnu
ftp://metalab.unc.edu/gnu/sed
2
Chapter 2: FDTD Simulator
1 Introduction
This document briefly explains the use and operation of the FDTD simulator. The document
first explains the command-line invocation of the program. Next, the format of the input file
is specified. Finally, the data file formats are explained.
2 Command-Line
The FDTD simulator is invoked using the following command-line:
Syntax:
fdtd 2d { [mem size] { [tmp dir] } } < [input file]
fdtd 3d { [mem size] { [tmp dir] } } < [input file]
This command either invokes the 2d simulator or the 3d simulator. The mem size parameter
sets the amount of memory available for the simulator in MB. If more memory is required, the
simulator will return an error message and stop execution. Specifying a value of 0 will turn
off the memory cap. tmp dir specifies the directory where temporary simulation files will be
stored. These files should be stored on a local drive with fast access, since these temporary
files are often used as swap space for intermittently-used structures. If this parameter is
omitted, the files are stored in /tmp.
3 Input File
The input file contains standard ASCII text. Environment variable references of the form
${env var name} may appear in the the file. These environment variables are looked up
and their values are inserted in the input file text stream. The input file parser is case
sensitive. The input file is divided into a number of sections. The input file must contain a
single Global Section followed by a number of other sections that control the generation of
simulation structures, simulation sources, and data manipulation. Each section begins with
a keyword, and is terminated by the start of a new section or the end of file. The following
section keywords are recognized:
global
simulate
Denotes the beginning of the section that contains global simulation variables.
Every input file must contain one and only one global section.
Denotes the beginning of the section that contains information about the
simulation space. This section is used to define objects.
Denotes the beginning of section containing information about sources to be
driven in the simulation.
This section is used to specify a point where a simulation should be executed.
data
This section is used to manipulate, save, and load data.
debug
This section is used to view internal variables.
space
source
Also, certain “transcending” statements are allowed in any section. Each section in the FDTD
file is described in detail in the following subsections.
3
3.1 Transcending Statements
These statements are allowed in any section.
3.1.1
Assigment
Syntax:
[var id] = [expression] ;
Description: Sets the variable var id to the expression expression.
3.1.2
Dangling Expression
Syntax:
[expression] ;
Description: Executes the expression, but does not perform any assignment.
3.1.3
Load
Syntax:
load [filename] [type] ;
Parameters: filename
type
String containing name of data file
Type of data being loaded. Currently
matlab and irit are supported
Description: This command loads data into memory which was previously stored using the save command. Also, these data files
may be generated by other programs. See section 8 for more
information.
3.1.4
Save
Syntax:
save [filename] [type] {append} [identifier] ...;
Parameters: filename
String containing name under which the
data is saved
type
Format to save with. Supported formats
are matlab and irit.
identifier
Variables to write to disk. If no identifiers are specified, all user variables are
written.
Description: This command saves data out to a file in a format which
can be read using the load command. This data is not (necessarily) stored in a format which will be understandable by
humans. See section 8 for the format.
4
3.1.5
System
Syntax:
system [command];
Parameters: command
A string containing the command to execute
Description: Executes the specified command in the system shell.
3.1.6
Write
Syntax:
write [filename] [type] {append} [identifier]
...;
Parameters filename
String containing name of file to write.
type
The output format of the data.
identifier
Variables to write out to disk. If no identifiers are specified, all user variables are
written.
Description: This command writes a list of identifiers to a file on disk
in a format more usable by humans. The type matlab is
currently the only one supported. See section 8 for the
format.
3.2 Global Section
The global section begins with the keyword global, and determines the simulation
grid parameters and the time steps. These values are required in order to know how
much memory to allocate for the simulation grids. At the end of the global section,
the simulation grids are allocated and initialized to 0. Note that in order for the PML
to be updated, a space section (maybe empty) must be defined.
3.2.1
Bound
Syntax:
bound {<x> [x flag] {[x flag]}} {<y> [y flag]
{[y flag]}} {<z> [z flag] {[z flag]}} ;
Parameters: x flag,
z flag
y flag,
A boundary flag for the specified direction. The possible values are conductor,
peridoic, decay1, and pml.
Description: This command sets the type of boundary seen in each of
the principal directions. A boundary definition consists of a
grid truncation condition (one of the following: conductor,
peridoic, or decay1), and the PML type. For example,
the following definition is valid:
bound <x> pml conductor <y> pml peridoic <z>
decay1 ;
5
3.2.2
c0
Syntax:
c0 [c0 value] ;
Parameters: c0 value
The new value for wavespeed in freespace.
Description: This command sets the free space wave speed. The units
are length/time.
3.2.3
Cells
Syntax:
cells [x cells] [y cells] {[z cells]}
{scattered|scattered2} ;
Parameters: x cells, y cells,
z cells
The number of cells in each of the principal axis directions.
scattered
Indicates that a scattered-field grid
should be created as opposted to a total field grid. Background parameters are
constant for the entire simulation space.
scattered2
Same as scattered option, except that
background parameters are defined for
each point in the simulation region. The
background parameters are set using the
background command (Section 3.3.1).
Description: This command normally appears first in the global section
to define how many cells should be created in the simulation grid. For the 2D simulator, the z cells parameter is
omitted. Note: Currently only changes in permittivity
are supported for scattered grids.
3.2.4
Coords
Syntax:
coords [coord lo] [coord hi] ;
Parameters: coord lo
Defines the logical lower corner of the
simulation box (or rectangle in 2D).
coord hi
Defines the logical upper corner of the
simulation box (or rectangle in 2D).
Description: This command creates the logical coordinate system which
is used when drawing objects, placing sources, and storing
data in the simulation cube. The logical coordinates also
specify the mapping from physical distance to number of
cells.
6
3.2.5
Decay1
Syntax:
decay1 [dir] [k] [kz] ;
Parameters: dir
Specifies the direction of the propagating wave or mode. The radial distance
R will be computed as the distance from
the point in space to the line {[dir] =
< x >, < y >, < z >} = 0.
k
Propagation constant for a plane wave in
the medium at the boundary.
kz
Propagation constant for the propagating
mode.
Description: This command sets the options for the decay1 boundary
condition. This condition truncates fields
√ at the boundary
−αR
assuming a decay of
/ R for 3D and e−αR
√ the form e
2
2
for 2D, where α = kz − k .
3.2.6
Eta0
Syntax:
eta0 [eta0 val] ;
Parameters: eta0 val
The new value for the characteristic
impedance of free space.
Description: This command allows you to change the characteristic
impedance of free space. The default is value is 377.0 ohms.
3.2.7
PML
Syntax:
pml [sigma] [delta cells] {isotropic}
{scattered};
pml [n] [R] [delta cells] {isotropic} {scattered}
;
Parameters: sigma
Maximum conductivity at the outside
boundary of the PML.
delta cells
Thickness of the PML in cells.
n
Exponent in conductivity gradient (default is 1.0 = linear).
R
Normal reflectivity of free-space/PML
boundary.
7
Description: This command is used to create a PML outside of the simulation region. The characteristics of the PML can be defined by specifying the maximum conductivity directly or by
specifying a reflection coefficient at normal incidence. The
keyword isotropic makes a PML in which σ x = σy = σz
which may work better for absorbing guided modes. The
keyword scattered specifies that the scattered field equations should be used in the PML (as opposed to total field).
This will create a source anywhere where materials extend
into the PML.
3.2.8
Time
Syntax:
time [total time] [time steps] {[stored steps]
{[skip]}} ;
Parameters: total time
A real number indicating the total time
(in the simulation time units) for the simulation.
time steps
An integer giving the number of discrete
time steps for the simulation.
stored steps
Number of time steps to keep (default is
to keep all time steps)
skip
Number of time steps from one stored
sample to the next (default is 1)
Description: This command is used to set up the amount of time to
simulate and the number of corresponding simulation steps.
If too few time steps are specified, a warning will be issued
telling that the stability criterion was not met.
3.3 Space Section
At the beginning of the space section, the simulation cells are read into RAM for
manipulation. At the end, the PML is recalculated (if applicable), average physical
parameter values are calculated and stored, and the cells are written back to disk.
3.3.1
Background
Syntax:
background {[epsilon] [mu] [sigma]} ;
Parameters: epsilon
Background relative permittivity.
mu
Background relative permeability.
sigma
Background conductivity.
8
Description: Sets all background physical constants to the specified epsilon, mu, and sigma values for a scattered grid, or
to the values currently defined in the drawing grid for a
scattered2 grid.
3.3.2
Clear
Syntax:
clear ;
Description: This command sets all cells in the simulation grid to free
space.
3.3.3
Conductor
Syntax:
conductor [polygon] [dir] [pos] ;
conductor [polygon|polyhedron] ;
conductor clear [polygon|polyhedron] ;
Parameters: polygon
Polygon which defines the outside boundary of the sheet.
polygon |
polyhedron
Polygon (2D) or polyhedron (3D) which
defines the conducting surface.
dir
Direction which the sheet is perpendicular to.
pos
Coordinate along the dir axis where the
sheet lies.
Description: Creates a perfectly conducting sheet in the simulation region. For the first form of the command, the sheet must lie
in a plane and be perpendicular to one of the principal axes.
The second form of the command takes an arbitrary polygon (in 2D) or polyhedron (in 3D). For each E field component in the volume, the face normal to the component is
computed. If this face is cut by the polygon/polyhedron,
the component is said to lie tangential on the perfect conductor. The clear form of the command erases tangential
components lying on the polygon/polyhedron. Conductors
are simulated as follows. For total field grids, tangential E
components lying on a conductor will be forced to 0. For
scattered grids, tangential E components on sheets which
are part of the background are forced to 0. Tangential components which are part of the foreground are set to −E inc .
3.3.4
Cube
Syntax:
cube [epsilon] [mu] [sigma] [coord lo] [coord hi]
{wrap}{merge} ;
9
Parameters: epsilon
Relative permittivity
mu
Relative permeability
sigma
Conductivity (Siemens/length)
coord lo
Lower coordinate of box
coord hi
Upper coordinate of box
Description: This command creates a box in the simulation region filled
with the specified physical parameters. wrap specifies that
a box occurring on the boundary should be wrapped to the
other side of the simulation region. merge specifies that
the box should be merged with existing objects, otherwise
shared cells will be overwritten by the new box.
3.3.5
Cubes
Syntax:
cubes [epsilon] [mu] [sigma] [coord lo]
[coord hi] [mean] [std] [fill fraction] {wrap}
{penetrate} {bound} {merge} ;
Parameters: epsilon
Relative permittivity
mu
Relative permeability
sigma
Conductivity (Siemens/length)
coord lo
Lower coordinate of bounding box
coord hi
Upper coordinate of bounding box
mean
Mean “radius” of the cube
std
standard deviation of the cube “radius”
fill fraction
Fraction of space to be filled by cubes
Description: Generates a collection of cubes. See description for the
spheres command (Section 3.3.16).
3.3.6
Drawpoly
Syntax:
drawpoly ([polygon] | [polyhedron]) ;
Parameters: polygon
polyhedron
If specified, adds a polygon.
If specified, adds a polyhedron.
10
Description: Adds a polygon or polyhedron to the debug drawing. Used
only to enhance your plots made in the debug section.
3.3.7
Imesh
Syntax:
imesh [var id] [coord lo] [coord hi] {[keep steps]
{[skip steps]}}
Parameters: var id
coord lo,
ord hi
Variable prefix for the x and y current
grids
co-
Lower and upper coordinate defining the
extreme corners of the current sheet
keep steps
Number of time steps to keep (default is
to keep all)
skip steps
Skip factor between time steps (default is
1)
Description: Defines a current sampling mesh which stores currents on
the simulation grid over time. The x and y current components are stored in the 2D grid variables var id x var id y.
The number of time steps to keep and the skip factor may
also be specified (see time command in Section 3.2.8). Note
that the coordinates define a plane which must be aligned
with the principal axes.
3.3.8
Initial
Syntax:
initial ;
Description: Initializes the field sources using initial conditions defined
by sources. This option can cut down on time required
for the simulation to reach a steady-state value. Only the
forced and additive sources support this option.
3.3.9
Mur
Syntax:
mur [order] [c] [coord lo] [coord hi] ;
Parameters: order
Order of the Mur boundary condition
c
coord lo,
ord hi
Speed (length/time)
co-
Coordinates defining extreme corners of
the absorbing sheet. One of the components must be equal for the two coordinates.
11
Description: Creates a Mur absorbing boundary condition in the simulation region. The coordinates must define a sheet aligned
with one of the principal axes (i.e., two of the components
must be equal). The wave speed c defines the speed and direction of the wave to be absorbed. A positive or negative
c indicates travel along or opposite to the principal axis,
respectively. Currently, only first order Mur boundaries are
supported.
3.3.10 Raw
Syntax:
raw [var id] [field id] [coord1] [coord2] [keep]
[skip] {[start]};
Parameters: var id
2D grid variable to store fields in
field id
Field component to store
coord1, coord2
Opposite coordinates of a box enclosing
the fields to be stored.
keep
Number of time steps to store
skip
Skip value between time steps
start
Optional start time step. If omitted, the
start time step is ntotal −nkeep nskip , which
just takes time samples at the end of the
simulation.
Description: Defines a raw field sample mesh that stores the time varying
fields during the simulation. This command provides better accuracy than the field command in the data section
which operates on averaged fields. The enclosing coordinates can be chosen to store a 1D, 2D, or 3D section of the
simulation. Specifying zero length for any dimension will
store a single node in that direction. Fields are stored in a
4D grid indexed by [x, y, z, t].
Units on electric field are V/length. Magnetic fields are
multiplied by η0 and also have units V/length.
3.3.11 Resistor
Syntax:
resistor [R] [dir] [coord lo] [coord hi] ;
Parameters: R
dir
Resistance (ohms)
Principal direction that the resistor is
aligned with.
12
coord lo,
ord hi
co-
Coordinates that define the region which
the distributed resistor occupies.
Description: Defines a distributed resistor in the simulation region
bounded by the specified coordinates and with the given
resistance. Note that the resistor must align with one of
the principal axes.
3.3.12 Resolution
Syntax:
resolution ([x cells] [y cells] [z cells] |
[cells]) ;
Parameters: x cells, y cells,
z cells
cells
Number of cells in each of the principal
directions.
Number of cells in all directions.
Description: This command sets the size of the internal drawing grid in
cells. Objects are drawn at this high resolution. The small
drawing cells are then volume averaged to obtain the value
to use in the simulation grid. This averaging can be turned
off by making the number of cells here smaller than the
number of simulation cells. For example, resolution 1 1
1 ; will turn off any averaging.
3.3.13 Seed
Syntax:
seed [seed int] ;
Parameters: seed int
New value for the seed.
Description: This command sets the random number generator seed.
Note that the seed is initialized using the time-of-day when
the FDTD simulator starts.
3.3.14 Solid
Syntax:
solid [eps exp] [mu exp] [sigma exp] [poly1 exp]
[poly2 exp] {merge};
Parameters: eps exp
A real expression for the relative permittivity
mu exp
A real expression for the relative permeability
sigma exp
A real expression for the conductivity
(S/length)
13
poly1 exp
A polygon/polyhedron expression defining space to be included in the solid. Set
to 0 to include all space.
poly2 exp
A polygon/polyhedron expression defining space to be excluded from the solid.
Set to 0 to exclude no space.
Description: This command can be used to create solid objects in the
simulation grid defined by general expressions for physical
parameters. The expressions can be functions of position
in the space. The bounds on the object are defined using a
symmetric diffecence of (poly1 - poly2), which are polygons
(2D) or polyhedra (3D). See the Section 6 on functions and
expressions for more information.
3.3.15 Sphere
Syntax:
sphere [epsilon] [mu] [sigma] [origin coord]
[radius] {merge} {wrap} ;
Parameters: epsilon
Relative permittivity
mu
Relative permeability
sigma
Conductivity (S/length)
origin coord
Coordinate of the center of the sphere (in
logical coords)
radius
Radius of the sphere (in logical coords)
Description: This command creates a sphere at the specified location
with the given physical parameters. Flags are explained in
the spheres command (Section 3.3.16).
3.3.16 Spheres
Syntax:
spheres [epsilon] [mu] [sigma] [lo coord]
[hi coord] [mean] [std] ([fill fraction] | count
[count]) {wrap} {penetrate} {bound} {merge} ;
Parameters: epsilon
Relative permittivity
mu
Relative permeability
sigma
Conductivity (S/length)
lo coord
Lower coordinate for the bounding box
14
hi coord
Upper coordinate for the bounding box
mean
Mean radius of the spheres
std
Standard deviation of the spheres
fill fraction
Fraction of space to be filled by spheres
count
Number of spheres
Description: This command generates a boxed region that is filled with a
collection of spheres. The number of spheres may be specified either by a fill fraction or by the number of spheres.
wrap specifies that spheres on the boundary should wrap to
the other side of the bounding box. penetrate allows the
spheres to penetrate. bound forces the spheres to be placed
completely inside of the bounding box. merge merges the
high-resolution grid with existing objects.
3.3.17 Vsrc
Syntax:
vsrc [source exp] [res val] [dir] [coord-]
[coord+] ;
Parameters: source exp
A lumped element source defined with
the source lumped function (Section
6.3.14).
res val
Internal resistance of source in ohms
dir
Direction of source
coord-
Negative terminal
coord+
Positive terminal
Description: Defines a lumped voltage element source. The source must
be aligned along one of the principal axes, thus coord- and
coord+ must have two points in common.
3.4 Source Section
The source section begins with the keyword source. This section is used to define
sources for a simulation.
3.4.1
Add
Syntax:
add [src exp] [coord lo] [coord hi]
{[field id]}...{odd|even} ;
add point [src exp] [coord] [field id] ;
15
Parameters: src exp
Source expression defined with one of the
source functions.
coord lo
Lower coordinate enclosing the source
plane
coord hi
Upper coordinate enclosing the source
plane
field id
One or more source field IDs
coord
Location of the point source. Will snap
to the nearest compatible node.
Description: Creates an additive (current) source to be excited during the
simulation. If no field IDs are specified, the source assumes
that all field IDs are to be added. For plane sources, this
command computes proper currents (magnetic or electric)
to obtain the fields for the specified source function. The
kewords odd and even specify whether the source should
be snapped to an odd or even node plane. The coordinates
coord lo and coord hi specify the plane where the source
should be driven. This plane must be aligned along one of
the principal axes. For the point source, the source expression should be a lumped source.
3.4.2
Clear
Syntax:
clear ;
Description: This command clears any sources that have been defined.
3.4.3
Forced
Syntax:
forced [src exp] [coord lo] [coord hi]
{[field id]} ...;
forced point [src exp] [coord] [field id] ;
Parameters: src exp
Source expression defined with one of the
source functions
coord lo
Lower coordinate enclosing the source
plane
coord hi
Upper coordinate enclosing the source
plane
field id
One or more source field IDs to force
coord
Coordinate where the point source should
be located
16
Description: Creates a forced field source for the simulation. If no field
IDs are specified, the statement assumes that all field IDs
are to be forced. The first form is for plane sources and the
second is for point sources.
3.4.4
Impulse
Syntax:
impulse [src exp] [coord lo] [coord hi]
{[field id]} ...;
impulse point [src exp] [coord] [field id] ;
Parameters: src exp
Source expression defined with one of the
source functions
coord lo
Lower coordinate enclosing the source
plane
coord hi
Upper coordinate enclosing the source
plane
field id
One or more source field IDs to force
coord
Coordinate where the point source should
be located
Description: Creates an impulse source for the simulation. The inpulse
source is similiar to a forced source, but components are
only forced at t=0. If no field IDs are specified, the statement assumes that all field IDs are to be forced. The first
form is for plane sources and the second is for point sources.
3.4.5
Incident
Syntax:
incident [source exp] ;
Parameters: source exp
Source expression to use for incident field
Description: Defines the incident source function for scattered grids.
3.4.6
Phased
Syntax:
phased [src exp] [coord lo] [coord hi]
{[field id]}...;
Parameters: src exp
Source expression defined with one of the
source functions.
coord lo
Lower coordinate enclosing the source
plane
coord hi
Upper coordinate enclosing the source
plane
17
field id
One or more source field IDs
Description: The “phased” source is similar to the split source in that
it excites a source which propagates in only one direction.
The source is achieved by adding two harmonic sources so
that phases add constructively to one side of a plane and
destructively on the other. Currently the driving plane is
snapped to one with tangential E (normal H) components.
The coordinates coord lo and coord hi define the plane
where the source is excited, and this plane must align with
one of the principal axes.
3.4.7
Split
Syntax:
split [source exp] [lo coord] [hi coord] ;
Parameters: source exp
Expression which evaluates to a source
lo coord
Lower coordinate of the plane which divides split and total field regions
hi coord
Upper coordinate of the division plane
Description: This function defines a split source. A split source is one in
which total field occurs on one side of a plane and scattered
field occurs on the other. This type of source is very useful
for finding reflection and transmission coefficients of structures. To use this source, the simulation grid type should be
total field, NOT scattered field. The source expression defines the source driving function as well as a plane where the
function is defined. lo coord and hi coord also define a plane,
but this is the plane where the actual split occurs. One of
the components of the two coordinates must be equal (the
plane needs to be aligned with one of the principal axes).
The coordinates also define the region in which the source
is driven.
3.4.8
Window
Syntax:
window gauss (tau [tau] | slope [slope] | rise
[rise]) ;
window clear ;
Parameters: tau
slope
Time constant for the Gaussian window
function (time units)
Maximum slope of the Gaussian window
function (1/time)
18
rise
99% rise time of the Gaussian window
function (time units)
Description: This function multiplies all source functions by a Gaussian
window in time: 1 − exp[−(t/τ )2 ]. Defining a window can
reduce the effect of transients which occur at the beginning
of a simulation.
3.5 Simulate Section
The simulate section begins with the keyword simulate. Currently, no statements
occur inside of the simulation section.
3.6 Debug Section
The debug section begins with the keyword debug. This section is used to debug the
FDTD simulator.
3.6.1
Axis
Syntax:
axis [dir1] [dir2] [dir3] [dir4] ;
Parameters: dir1, dir2,
dir3, dir4
Each direction specifies a direction for the
nth principal axis
Description: This statement sets the principal axes for any following plot
statements.
3.6.2
Plot
Syntax:
plot [identifier] {[filename]} ;
Parameters: indentifier
The quantity which is to be plotted. The
following values are recognized:
2D:
eps, mu, sigma, sigma x,sigma y,
eps avg, mu avg, sigma avg,
sigma x avg, sigma y avg, ex,ey,
ez, hx, hy, hz, ex freq, ey freq,
ez freq, hx freq, hy freq, hz freq
3D:
eps, mu, sigma, sigma x,sigma y,
sigma z, eps avg, mu avg,
sigma avg, sigma x avg,
sigma y avg, sigma z avg, ez,
ez freq, f eps, f mu, f sigma,
f sigma x, f sigma y, f sigma z,
f sigma x star, f sigma y star,
f sigma z star
19
filename
If specified, the program automatically
dumps the x-window to a file using XWD.
Description: This command opens an x-window and plots the specified
quantity.
3.6.3
Plotfile
Syntax:
plotfile [identifier] [filename] ;
Parameters: identifier
filename
Name of identifier to plot
String containing name of file to create
Description: Stores a complete plot into a file which can later be displayed with the plotfile unix command. Valid identifiers
are the same as the plot command (Section 3.6.2).
3.6.4
Range
Syntax:
range [lo coord] [hi coord] ;
Parameters: lo coord
Sets the lower coordinate of the set to
plot
hi coord
Sets the upper coordinate of the set to
plot
Description: This function sets the region which is to be plotted. This
allows the user to zoom in on a particular part of a data
set.
3.6.5
Scale
Syntax:
scale {[min] [max]} ;
Parameters: min
Minimum value on the debug plot scale
max
Maximum value on the debug plot scale
Description: This command is used to specify the range of values to be
plotted. Passing no parameters sets the scale back to the
default. In the default case, min is the minimum value in
the data set and max is the maximum value.
3.7 Data Section
The data section begins with the keyword data. This section allows the user to
manipulate the simulation data and to do some rudimentary post-processing.
20
3.7.1
Farfield
Syntax:
farfield [var id] [field id] [plane exp]
[lo coord] [hi coord] [phi start] [phi end]
[phi points] {[th start] [th end] [th points]}
;
Parameters: var id
Variable in which to store the far fields.
field id
Identifier of the field component to store
(relative to the local coordinate system).
Currently allowed values are Ex, Ey,
Ez, Eth, Ephi.
plane exp
A plane which defines the local coordinate system.
lo coord
Low coordinate of the bounding box
where the far fields will be computed.
hi coord
High coordinate of the bounding box
where the far fields will be computed.
phi start,
phi end,
phi points
Start, end, and number of points to store
in angle phi.
th start,
th end,
th points
Start, end and number of points to store
in angle theta (3D only).
Description: This function computes the far field radiation pattern over
the specified range of angles. Units are V/length 2 for 3D
simulations and V/length for 2D simulations. For 2D simulations, only one range of angles is specified. Note: The
FFT command must have been executed for this statement
to have any effect.
3.7.2
FFT
Syntax:
fft [freq] [n] ;
Parameters: freq
n
Fundamental frequency for the FFT.
This is usually the frequency of your
source.
Number of points per period to use for
the FFT.
21
Description: This command calculates the steady state field values from
the simulated time-domain data. The function will attempt
to adjust the actual number of points used if it doesn’t fit
nicely with the simulation time steps.
3.7.3
Field
Syntax:
field line [var id] [field id] [plane exp]
[x start] [x stop] [x points] {time [start]
{[stop] [n]}} ;
field rect [var id] [field id] [plane exp]
[x start] [x stop][x points] [y start] [y stop]
[y points] {time [start] {[stop] [n]}} ;
field box [var id] [field id] [plane exp]
[x start] [x stop] [x points] [y start] [y stop]
[y points] [z start] [z stop] [z points] {time
[start] [stop] [n]} ;
Parameters: var id
Identifier in which to store the line of field
information
field id
The field component being stored
plane exp
An expression evaluating to a plane. This
defines the local coordinate system in
which the line/rect/box is defined.
x start
Real number denoting the starting x
point along the local x-axis
x stop
Real number denoting the ending y point
along the local x-axis
x points
Number of points subdividing the line
y start, y stop,
y points
Same as above except in y direction
z start, z stop,
z points
Same as above except in z direction
start
Starting time value
stop
Ending time value
n
Number of time samples to store
22
Description: This command stores field components along a line, in a
rectangle, or in a box. Electric and magnetic fields have
units of V/length and A/length, respectively. The plane expression defines a local coordinate system in which the field
components are to be extracted. Either sinusoidal steadystate values or time varying fields may be stored. If the time
clause is omitted, steady-state values are stored. Note:
This command operates on fields which have been averaged
to the center of each cell. Also, fields are interpolated (in
general) to obtain values at arbitrary spatial coordinates. If
high precision is required, consider using the raw command
(Section 3.3.10).
3.7.4
Power Absorbed
Syntax:
Pa [var id] [lo coord] [hi coord] ;
Parameters: var id
Varible in which to store the absorbed
power
lo coord
Lower coordinate of bounding box, inside
of which power absorbed is calculated
hi coord
Upper coordinate of bounding box
Description: This command stores the total (steady-state) power absorbed inside of a box (in Watts).
3.7.5
Power Scattered
Syntax:
Ps {farfield} [var id] [lo coord] [hi coord] ;
Parameters: var id
Variable in which to store the power scattered
lo coord
Lower coordinate of the bounding box
where power scattered is calculated
hi coord
Upper coordinate of bounding box
Description: This command calculates the total power scattered from the
given bounding box (in Watts). If farfield is specified, the
farfields are first calculated and then the power is found by
integrating over an enclosing surface. The farfield method
is much less efficient than performing the calculation in the
near field. However, it seems to be a little less sensitive to
phase error.
23
3.7.6
Scattered
Syntax:
scattered [source exp] ;
Parameters: source exp
A source expression defining the incident
source
Description: This command converts total fields into scattered fields by
subtracting the incident source at each point in space.
3.7.7
Total
Syntax:
total [source exp] ;
Parameters: source exp
A source expression defining the incident
source
Description: This function converts a scattered fields into total fields by
adding the incident field (the source) at each point in space.
4 Base Types
These types are used in statements in expressions throughout the input file.
4.1 Literals
4.1.1
Cell
Syntax:
"[" i j "]" | "[" i j k "]"
Description: Used to identify a cell in the simulation grid.
4.1.2
Complex
Syntax:
"(" x "," y ")" | "(" α @ θ ")"
Description: Defines a complex literal by specifying real and imaginary
parts or by specifying magnitude and phase (in degrees).
4.1.3
Coordinate
Syntax:
"{" x y "}" | "{" x y z "}"
Description: Used to identify a logical point in space.
4.1.4
Direction
Syntax:
"<x>" | "<y>" | "<z>" | "<t>"
Description: Used to identify one of the principal directions.
24
4.1.5
Expression
Syntax:
’ exp string ’
Description: Defines a literal expression which is not immediately evaluated.
4.1.6
Field id
Syntax:
"Ex" | "Ey" | "Ez" | "Eth" | "Ephi" | "Hx" | "Hy"
| "Hz" | "Hth" | "Hphi"
Description: Speficies a field component.
4.1.7
Integer
Syntax:
n | "(-" n ")"
Description: Defines an integer literal. Note that parenthesis are required
to define negative integers.
4.1.8
Real
Syntax:
x | "(-" x ")"
Description: Defines a real literal. Parenthesis are required for negative
reals.
4.1.9
String
Syntax:
‘‘s’’
Description: Defines a literal string. Note that double quotes are used
to enclose the string.
5 Operators/Precedence
Currently, all operators are left associative.
,
| & || &&
== !=
< <= > >=
+ * / % mod div
^
!
( ) [ ]
Positional separator
Logical OR and AND
Equal, NOT equal
Inequality operators
Addition, subtraction
Multiplication, division, real modulo, integer modulo, integer div
Power operator
Logical NOT
Associative operators
6 Functions/Variables
25
6.1 I/O Functions
6.1.1
print
Syntax:
void print(expression)
Description: This function evaluates the expression, formats it as a
string, and prints it to the console.
6.2 Math Functions
6.2.1
abs
Syntax:
int abs(int)
real abs(real)
real abs(cplx)
Description: Absolute value function.
6.2.2
acos
Syntax:
real acos(real)
Description: Real inverse cosine.
6.2.3
arg
Syntax:
real arg(cplx)
Description: Returns the angle of the argument (radians).
6.2.4
asin
Syntax:
real asin(real)
Description: Real inverse sine.
6.2.5
atan
Syntax:
real atan(real)
Description: Real inverse tangent.
6.2.6
atan2
Syntax:
real atan(real, real)
Description: Two argument real inverse tangent.
26
6.2.7
cos
Syntax:
real cos(real)
cplx cos(cplx)
Description: Real and complex cosine.
6.2.8
exp
Syntax:
real exp(real)
cplx exp(cplx)
Description: Real and complex exponential function.
6.2.9
Imag
Syntax:
real imag(cplx)
Description: Takes the imaginary part.
6.2.10 ln
Syntax:
real ln(real)
cplx ln(cplx)
Description: Real and complex natural log function.
6.2.11 real
Syntax:
real real(cplx)
Description: Takes the real part.
6.2.12 sin
Syntax:
real sin(real)
cplx sin(cplx)
Description: Real and complex sin function.
6.2.13 sin
Syntax:
real sinc(real)
cplx sinc(cplx)
Description: Real and complex sin(x)/x function.
27
6.2.14 sqrt
Syntax:
real sqrt(int)
real sqrt(real)
cplx sqrt(cplx)
Description: Square root function.
6.2.15 Tan
Syntax:
real tan(real)
cplx tan(cplx)
Description: Real and complex tangent.
6.3 Geometric Functions
6.3.1
polybox
Syntax:
polygon polybox(lo coord, hi coord);
polyhedron polybox(lo coord, hi coord);
Description: This function returns a polygon (in 2D) or a polyhedron (in
3D) given a lower and upper coordinate.
6.3.2
plane
Syntax:
plane plane(origin coord, x hat coord)
plane plane(origin coord, x hat coord,
y hat coord)
Description: This function returns an oriented plane given a point representing the origin of the plane, the x̂ direction in the plane,
and a vector with a component in the ŷ direction. If x̂
is orthogonal to ŷ, then ŷ is actually the unit ŷ vector in
the plane. Note that in 2D, only a single vector in the the
plane is required. The other unit vector is made to be the
−ẑ direction
6.3.3
polycircle
Syntax:
polyhedron polycircle(plane, a real, N int)
Description: Generates a polygon which approximates a circle. plane is
the plane in which the circle lies, and N is the number of
points to use.
28
6.3.4
polyellipse
Syntax:
polyhedron polyellipse(plane, a real, b real,
{x0 real, y0 real,} N int)
Description: Generates a polygon which approximates an ellipse. plane
is the plane in which the ellipse lies, a and b represent the
major axes, x0 and y0 are the optional origin, and N is the
number of points to use.
6.3.5
polycone
Syntax:
polyhedron polycone(plane,
a1 real, {b1 real, {x01 real, y01 real,}}
a2 real, {b2 real, {x02 real, y01 real,}}
l real, N int, faces int)
Description: Approximates an elliptical cone out of polygons. plane is
the local plane of reference for drawing the cylinder. The
first face of the cone defined by major axes a1 and b1 and
origin (x01, y01) is in the xy plane. The second face is
drawn in a plane parallel to the xy plane at a distance of
l with major axes a2 and b2 and origin (x02, y02). The
elliptical faces are approxmated with polygons having N
points. The flag faces int specifies whether or not the faces
should be included in the object.
6.3.6
polycyl
Syntax:
polyhedron polycyl(plane, a real, l real, N int,
faces int)
Description: Approximates a cylinder out of polygons. plane is the local
plane of reference for drawing the cylinder. The first face
of the cylinder is in the xy plane. The cylinder is drawn
in the ẑ direction with a length l. The circular faces are
approxmated with polygons having N points. faces is a flag
specifying whether or not the faces should be included.
6.3.7
polygon
Syntax:
polygon polygon(coord, ...)
Description: Generates a polygon given a list of coordinates. The last
coordinate connects with the first. The coordinates should
lie in the same plane, but this is not enforced.
6.3.8
polyline
Syntax:
polygon polyline(coord, ...)
29
Description: Generates a polygon given a list of coordinates. The last
point is not connected with the first, and the points need
not lie in the same plane.
6.3.9
polygontype
Syntax:
polygon polygontype(polygon, type int)
Description: Switches a from a polygon to a polyline and vice versa.
polygon is the polygon to switch, and type int is the desired
type: 0=polygon, 1=polyline.
6.3.10 polyhedron
Syntax:
polyhedron polyhedron(polygon, ...)
Description: Generates a polyhedron given a list of polygons. This function does not force the polyhedron to be closed.
6.3.11 read var
Syntax:
void read var(filename string, format string)
Description: This function reads in variables from the file filename given
a specific format in format. Only irit is recognized as a valid
format currently. Variables are stored in the global variable
table.
6.3.12 rotate
Syntax:
spat func rotate(spat func, angle,
origin coord,vec coord)
polygon rotate(polygon, angle, origin coord,
vec coord)
polyhedron rotate(polyhedron, angle,
origin coord, vec coord)
plane rotate(plane, angle, origin coord,
vec coord)
Description: Rotates the spcified spatial function, polygon, polyhedron, or plane by angle degrees about a vector defined by
vec coord which has an origin at origin coord.
30
6.3.13 scale
Syntax:
spat func scale(spat func, mult coord,
origin coord)
polygon scale(polygon, mult coord, origin coord)
polyhedron scale(polyhedron, mult coord,
origin coord)
plane scale(plane, mult coord, origin coord)
Description: Scales the specified object by the vector defined by
mult coord about the center point origin coord.
6.3.14 source lumped
Syntax:
source source lumped(time params)
Description: Creates a lumped element source that only depends on
time. The format of the time params is described under
source plane (Section 6.3.16).
6.3.15 source plane
Syntax:
source source plane(plane, c, time params,
shape params)
time params =
"harmonic", freq, amp, phase
"gauss", freq, amp, phase, tau, t0
"gauss2", freq, amp, phase, tau, t0
"exp", f exp, df dt exp,
"grid", grid
shape params =
"const" , "field id", value ...
"exp" , "field id", exp ...
"grid" , "field id", grid ...
time
params:
The time parameters define the propagation of the source
as a function of time and orthogonal distance from the
reference plane.
harmonic
The harmonic source creates a sine wave
with constant amplitude
31
shape
params:
gauss
The gauss source is a sinewave in time
with a Gaussian time window. The propagation function is given as f (d, t) =
exp(−(t − t0)2 /τ 2 ) cos(2πf (t − d/c)).
gauss2
The gauss2 source is a Gaussian modulated sinewave in time and space. The
gaussian pulse moves in the +z direction
at the specified wave speed. The propagation function is f (d, t) = exp(−(t −
d/c − t0)2 /τ 2 ) cos(2πf (t − d/c)).
exp
For this type of source, arbitrary closedform expressions are provided for f (d, t)
and ∂f
∂t (d, t).
grid
For the grid source, either a 1D grid is
specified for the function f (t − x/c) or
a 2D grid is specified for the function
f (t, x). The function is differenced in
time to obtain ∂f
∂t .
The shape parameters define the shape of the source projected orthogonally onto the reference plane. The available source types are explained below.
const
Fields are constant in the plane. The
value of each component can be specified
separately.
exp
Each field component is specified by an
expression which depends on the variables x, y, and z.
grid
Each field component is specified by a 2D
grid.
Description: This somewhat complex function is used to create a new
plane wave source variable. The source is defined by passing
in a reference plane, propagation parameters, and shape
parameters. The source is assumed to travel in the +z
direction relative to the reference plane.
6.3.16 source vol
Syntax:
source source vol("plane", freq, amp, phase, k,
E, eps, mu, sigma);
32
Description: This function creates a volume source. This source type is
not tied to any particular reference plane. These sources are
useful for excitation at every point in space (like incident
sources).
plane source
Defines a plane wave volume source. freq, amp, and phase
are scalars representing the frequency, amplitude, and phase
of the source. k is a coordinate representing the propagation
vector, E is a coordinate representing the E field vector, and
eps, mu, and sigma are the relative permittivity, permeability, and conductivity seen by the propagating wave. H field
components are computed using H = k̂ × E. The source
then has the functional form E(x, y, z) = E exp(jk · r).
6.3.17 translate
Syntax:
spat func translate(spat func, coord)
polygon translate(polygon, coord)
polyhedron translate(polyhedron, coord)
plane translate(plane, coord)
Description: Moves the specific object in space by the displacement vector given in coord.
6.4 Builtin Variables
Expressions for sources and drawing objects often require referencing the current time
value or the current spatial coordinate. The following table lists the available builtin
variables.
eta0
Characteristic impedance of free space
c0
Wave speed in free space
d
Distance from reference plane
e
exp(1)
√
j
−1
null
Returns new integer = 0
pi
π
t
Current real time (sources)
x, y, z Current spatial coordinate (sources/objects)
7 GDB Functions
This section explains some of the commands that are available from GDB at runtime when
the simulate is built with symbols. Each function is invoked by issuing the call command
in GDB.
7.1 dPlot
Syntax:
void dPlot(offset)
33
Inputs:
offset
The offset of the quantity to be plotted.
Description: This function plots the quantity associated with the offset. Execute
dPlot(-1) for a list of available offsets. Enumeration values starting
with the prefix node offset followed by the name of the quantity
(node offset ex, for example) may also be used.
7.2 dPrintCell
Syntax:
void dPrintCell(i, j, k)
void dPrintCell(i, j)
Inputs:
i, j, k
Spatial cell number. Only two coordinates are specified in the 2D code.
Description: Prints information on the specified cell. Cells contain physical quantities (, µ, σ) in the simulation region.
7.3 dPrintNode
Syntax:
nodeDef *dPrintNode(i, j, k, n)
nodeDef *dPrintNode(i, j, n)
Inputs:
i, j, k
Spatial coordinate. Only two components are specified in the 2D code.
n
Time step. Only two time steps (0 and 1) are stored
in RAM.
Returns:
A pointer to the node structure.
Description: This function prints out information stored about the specified node.
8 Data Input/Output
This section explains the formats which the FDTD simulator can read and write.
8.1 Save/Load Formats
The save/load format was created with the intention of being able to save variables
in a format which can be read back without any loss of information. However, this
generality comes at the loss of readability of the files which are created. This section
is useful for writing programs which must read or write these formats.
8.1.1
IRIT Format
The IRIT format is currently not supported for Save operations. However,
the ASCII IRIT format may be loaded. See documentation on IRIT for
the format. Currenlty, only polygons and polyhedra may be read.
8.1.2
Matlab (ASCII) Format
Each variable in the Matlab file is saved with an identifier of the form
34
[local id] [type ext] , where local id is the identifier for the variable in
the FDTD simulator, and type ext is a string which identifies the variable
type. The following extensions are used:
int
Integer
Stored as an integer scalar.
real
Real number
Stored as a real scalar.
cplx
Complex number
Stored as a complex scalar in.
cell
Cell
Stored as a 3 element row vector.
coord
2D or 3D coordinate
Stored as a 3 element row vector.
str
String
Stored as a string array.
id
Identifier
Stored as a string array.
rgrid
Real grid
Stored as a stacked row vector with following elements:
[dims]
[elem 1] [elem 2] . . . [elem dims]
[range lo 1] [range lo 2] . . . [range lo dims]
[range hi 1] [range hi 2] . . . [range hi dims]
[a 0 0 0 . . . 0] [a 1 0 0 . . . 0] [a 2 0 0 . . . 0] . . . [a n1 0 0 . . . 0]
..
.
[a 0 n2 n3 n4] [a 1 n2 n3 n4] . . . [a n1 n2 n3 n4]
The vectors are stack with the leftmost indicies counting first.
cgrid
Complex grid
Has the same format as the real grid, except each element is
ofthe format (re, im).
polyg
polyh
plane
pt
Polygon
Polyhedron
Plane
Field point.
35
src
exp
spfunc
Source
Expression
Spatial function
Not supported yet.
8.2 Write Format
The write format is intended to allow the writing of data files which are easier for
humans to read and use. However, insufficient detail is stored about the data to allow
the file to be converted back into FDTD variables.
Many of the types are stored in the same format as the Load/Save format, except
the extension [type] is dropped. The main exception to the rule is the grid format. For each grid variable, two variables are written to the Matlab file. One variable (stored under the internal variable name) stores the data, and another called
[var name] range stores the range variables for the grid. For the data variable, the
column dimension stores the first dimension of the grid. The rest of the dimensions are
lumped into the rows with the leftmost dimension counting first. The range variable
is stored as a matrix of the following format:
[range lo 1]
[range hi 1]
[elem 1]
[range lo 2]
[range hi 2]
[elem 2]
...
...
...
[range lo n]
[range hi n]
[elem n]
9 Theory of Operation
This section contains information on the internal workings of the FDTD simulator.
9.1 Gridding
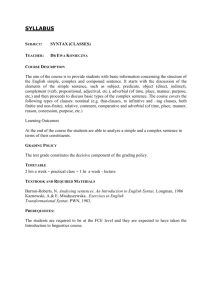
The 2D and 3D FDTD codes use a similar gridding scheme. Figure 9.1 shows how
the space is gridded.
(0,N)
(0,M,N)
(M,N)
(M,N,O)
Ex
PML
Ex
Ey
Ez
Ey
Ez
Hx
(0,0,O)
Hy
Hx
PML
Simulation Region
PML
Hz
Hy
Hz
(M,N,0)
z
y
x
(0,0)
(M,0)
(a) 2D
(0,0,0)
(M,0,0)
(b) 3D
Figure 9.1: Grid configurations for the 2D and 3D grids. Note that the corners of
the domain and the PML always occur on Ez nodes.
Nodes are numbered using whole integers 0, 1, 2, ..., {M, N, O} rather than half-integers,
which is sometimes used in the theoretical formulation. The use of whole integers
36
simplifies translation from the equations to actual code. The full grid of nodes is represented internally using a multi-dimensional array of pointers. Then, each pointer
may point to a different structure depending on the type of node.
Field nodes are updated in time according to the standard time marching procedure.
Time steps are numbered using the discrete integers 0, 1, 2, ..., TimeSteps. E field
quantities are assumed to occupy whole-integer time steps, and H field quantities
occupy half integer time steps. Thus, in time, the update procedure computes the
fields
E0 , H1/2 , E1 , H3/2 , E2 , . . . , H2(TimeSteps−1)/2 .
However, since the computer requires arrays to be indexed with whole integers, the
order is
E0 , H0 , E1 , H1 , E2 , . . . , ETimeSteps−1 , HTimeSteps−1 .
in terms of true indices.
Since the update equations for each field quantity only depend on the previous time
step, only the current time step (n) and previous time step (n−1) are stored in RAM.
The field values are stored in a two element array indexed by the integers np and nm
which are either 0 or 1. Field values which are required for later computations are
stored to disk, thus conserving RAM.
The following piece of pseuocode shows the basic procedure for updating field quantities:
E0 = H 0 = 0
for n = 1 to TimeSteps
np = n mod 2 ; Index into array for current time step
nm = (n − 1) mod 2 ; Index into array for previous time step
Compute update for En according to governing E equations
Adjust En according to E field sources
Adjust En according to lumped elements
Adjust En according to Mur sheets
Adjust En according to special grid truncation conditions
Compute and store electric current mesh values
Compute update for Hn according to governing H equations
Adjust Hn according to H field sources
Adjust Hn according to Mur sheets
Adjust Hn according to special grid truncation conditions
Store raw field element (E or H) values
If n is a stored time step,
37
Average quantities to center of each cell
Store to disk
end if
end for
9.2 Governing Equations
This section lists the governing differential equations that are used for the FDTD
simulator and the corresponding discrete update equations. The governing equations
are obtained from Maxwell’s equations in point form expanded in terms of individual
components. Normalizations have been applied to obtain the equations in terms of
relative quantities.
9.2.1
Incident/Scattered Field Formulation
For certain problems, it is more efficient (and possibly more accurate) to
model only the scattered field rather than the total field.
First, we define the background geometry as the physical parameters of a
medium where the incident field propagates without scattering. Next, we
can write the total fields (which satisfy Maxwell’s equations) as
E = Ei + Es
(9.1)
H = H i + H s.
(9.2)
Faraday’s law and Ampere’s law are satisfied for the total field on the total
geometry and the incident field on the background geometry:
∂H
µr
η0
c0
∂t
µi
∂H i
∇ × E i = − η0
c0
∂t
r ∂E
∇ × η0 H =
+ σ η0 E
c0 ∂t
i ∂E
∇ × η0 H i =
+ σ i η0 E i .
c0 ∂t
∇×E = −
(9.3)
(9.4)
(9.5)
(9.6)
Expanding total field in terms of the incident field plus scattered for Faraday’s law gives
∇ × [E i + E s ] = −
∂[H i + H s ]
µr
η0
c0
∂t
(9.7)
38
µr
µr
∂H s
∂H i
η0
− ∇ × Ei −
η0
c0
∂t
c0
∂t
∂H s µr − µi
∂H i
µr
η0
−
η0
= −
c0
∂t
c0
∂t
∇ × Es = −
(9.8)
(9.9)
and for Ampere’s law gives
∇ × η0 [H i + H s ] =
∇ × η0 H s
=
=
r ∂[E i + E s ]
(9.10)
+ σ η0 [E i + E s ]
c0
∂t
r ∂E s
r ∂E i
+ σ η0 E s − ∇ × η 0 H i +
+ ση0 E i (9.11)
c0 ∂t
c0 ∂t
r ∂E s
r − i ∂E i
+ σ η0 E s +
+ (σ − σi )η0 E i .
(9.12)
c0 ∂t
c0
∂t
Therefore, each point where the total geometry is different from the background geometry presents a source in terms of the incident field. Then, our
simulation region only contains scattered fields. This method can simplify
excitation of the incident wave as well as avoiding dynamic range problems.
9.2.2
2D TM Continuous
µr
η0
c0
µr
η0
c0
r ∂Ez
+σ
c0 ∂t
9.2.3
∂Hx
∂t
∂Hy
∂t
η 0 Ez
∂Ez
∂y
∂Ez
=
∂x
∂Hy
∂Hx
= η0
−
∂x
∂y
= −
(9.13)
(9.14)
(9.15)
2D TE Continuous
r ∂Ex
+σ
c0 ∂t
r ∂Ey
+σ
c0 ∂t
µr
η0
c0
∂Hz
∂y
∂Hz
= −η0
∂x
∂Ex ∂Ey
=
−
∂y
∂x
η 0 Ex = η 0
(9.16)
η 0 Ey
(9.17)
∂Hz
∂t
(9.18)
(9.19)
39
9.2.4
2D Incident/Scattered TE Continuous
∂Hsx
µr
η0
c0
∂t
µr
∂Hsy
η0
c0
∂t
r ∂Esz
+ σ η0 Esz
c0 ∂t
9.2.5
∂Esz
µr − µ i
∂Hix
−
η0
∂y
c0
∂t
∂Esz
µr − µ i
∂Hiy
=
−
η0
∂x
c0
∂t
∂Hsy
∂Hsx
= η0
−
∂x
∂y
r − i ∂Eiz
−
− (σ − σi ) η0 Eiy
c0
∂t
= −
(9.20)
(9.21)
(9.22)
2D Incident/Scattered TM Continuous
r ∂Esx
∂Hsz
r − i ∂Eix
+ σ η0 Esx = η0
−
− (σ − σi ) η0 Eix (9.23)
c0 ∂t
∂y
c0
∂t
r ∂Esy
∂Hsz
r − i ∂Eiy
+ σ η0 Esy = −η0
−
− (σ − σi ) η0 Eiy (9.24)
c0 ∂t
∂x
c0
∂t
µr
∂Hsz
∂Esx ∂Esy
µr − µi ∂Hiz
η0
η0
=
−
−
(9.25)
c0
∂t
∂y
∂x
c0
∂t
9.2.6
2D PML TM Continuous
µr
c0
µr
c0
9.2.7
r ∂Ezx
+ σx η0 Ezx
c0 ∂t
r ∂Ezy
+ σy η0 Ezy
c0 ∂t
σy∗
η0 DHx t + η0 Hx
η0
σx∗
η0 DHy t + η0 Hy
η0
∂Hy
∂x
∂Hx
= −η0
∂y
∂[Ezx + Ezy ]
= −
∂y
∂[Ezx + Ezy ]
= −
∂x
= η0
(9.26)
(9.27)
(9.28)
(9.29)
2D PML TE Continuous
r ∂Ex
∂[Hzx + Hzy ]
+ σ y η0 Ex = η 0
c0 ∂t
∂y
∂[Hzx + Hzy ]
r ∂Ey
+ σx η0 Ey = −η0
c0 ∂t
∂x
∗
∂Hzx σx
∂Ey
µr
η0
+ η0 Hzx = −
c0
∂t
η0
∂x
(9.30)
(9.31)
(9.32)
40
σy∗
∂Hzy
∂Ex
µr
η0
+ η0 Hzy = −
c0
∂t
η0
∂y
9.2.8
2D TM Discrete
np
η0 Hx,ij
np
η0 Hy,ij
np
Ez,ij
"
#
=
np
np
c0 ∆t Ez,i,j−1 − Ez,i,j+1
nm
+ η0 Hx,i,j
µr
∆y
(9.34)
=
np
np
c0 ∆t Ez,i+1,j − Ez,i−1,j
nm
+ η0 Hy,i,j
µr
∆x
(9.35)
=
"
#
"
nm
nm
nm
nm
η0 Hy,i+1,j
− η0 Hy,i−1,j
η0 Hx,i,j−1
− η0 Hx,i,j+1
+
∆x
∆y
r
σ η0
nm
+
−
Ez,ij
c0 ∆t
2
9.2.9
np
Ex,ij
np
Ey,ij
np
η0 Hz,ij
=
(9.33)
#
σ η0
r
+
c0 ∆t
2
−1
(9.36)
2D TE Discrete
"
nm
nm
η0 Hz,i,j+1
− η0 Hz,i,j−1
+
∆y
r
σ η0
nm
−
Ex,ij
c0 ∆t
2
#
=
"
=
np
np
np
np
c0 ∆t Ex,i,j+1 − Ex,i,j−1 Ey,i−1,j − Ey,i+1,j
nm
+
+ Hz,ij
µr
∆y
∆x
nm
nm
η0 Hz,i−1,j
− η0 Hz,i+1,j
+
∆x
"
σ η0
r
nm
Ey,ij
−
c0 ∆t
2
#
#
r
σ η0
+
c0 ∆t
2
r
σ η0
+
c0 ∆t
2
−1
−1
(9.37)
(9.38)
(9.39)
9.2.10 2D PML TM Discrete
np
Ezx,ij
np
Ezy,ij
np
η0 Hx,ij
np
η0 Hy,ij
=
=
=
=
"
"
"
"
nm
nm
η0 Hy,i+1,j
− η0 Hy,i−1,j
+
∆x
nm
nm
η0 Hx,i,j−1
− η0 Hx,i,j+1
+
∆y
r
σ η0
nm
Ezx,ij
−
c0 ∆t
2
σ η0
r
nm
Ezy,ij
−
c0 ∆t
2
np
np
np
np
Ezx,i,j−1
− Ezx,i,j+1
+ Ezy,i,j−1
− Ezy,i,j+1
+
∆y
!
σy∗ η0
µr
nm
−
η0 Hx,ij
c0 ∆t
2
#
σy∗ η0
µr
+
c0 ∆t
2
!−1
np
np
np
np
Ezx,i+1,j
− Ezx,i−1,j
+ Ezy,i+1,j
− Ezy,i−1,j
+
∆x
#
#
r
σ η0
+
c0 ∆t
2
σ η0
r
+
c0 ∆t
2
−1
−1
(9.40)
(9.41)
(9.42)
41
σ ∗ η0
µr
nm
η0 Hy,ij
− x
c0 ∆t
2
#
σ ∗ η0
µr
+ x
c0 ∆t
2
−1
(9.43)
9.2.11 2D PML TE Discrete
np
Ex,ij
=
"
nm
nm
nm
nm
η0 Hzx,i,j+1
− η0 Hzx,i,j−1
+ Hzy,i,j+1
− η0 Hzy,i,j−1
∆y
σy η0
r
nm
−
+
Ex,ij
c0 ∆t
2
np
Ey,ij
=
"
np
η0 Hzy,ij
=
=
"
"
σy η0
r
+
c0 ∆t
2
−1
(9.44)
nm
nm
nm
nm
η0 Hzx,i−1,j
− η0 Hzx,i+1,j
+ Hzy,i−1,j
− η0 Hzy,i+1,j
∆x
σx η0
r
nm
−
+
Ey,ij
c0 ∆t
2
np
η0 Hzx,ij
#
np
np
Ey,i−1,j
− Ey,i+1,j
+
∆x
np
np
Ex,i,j+1
− Ex,i,j−1
+
∆y
#
σx η0
r
+
c0 ∆t
2
−1
(9.45)
µr
σ ∗ η0
nm
η0 Hzx,ij
− x
c0 ∆t
2
!
#
σy∗ η0
µr
nm
−
η0 Hzy,ij
c0 ∆t
2
#
σ ∗ η0
µr
+ x
c0 ∆t
2
σy∗ η0
µr
+
c0 ∆t
2
−1
!−1
(9.46)
(9.47)
9.2.12 2D Incident/Scattered TM Discrete
np
η0 Hx,ij
=
np
η0 Hy,ij
np
Ez,ij
=
=
"
#
np
np
c0 ∆t Ez,i,j−1 − Ez,i,j+1
(µr − µi ) ∂Hix nm
+ η0 Hx,i,j
−
η0
(9.48)
µr
∆y
µr
∂t t=(np−0.5)∆t
"
#
np
np
c0 ∆t Ez,i+1,j − Ez,i−1,j
(µr − µi ) ∂Hiy nm
η0
(9.49)
+ η0 Hy,i,j
−
µr
∆x
µr
∂t t=(np−0.5)∆t
"
nm
nm
nm
nm
η0 Hy,i+1,j
− η0 Hy,i−1,j
η0 Hx,i,j+1
− η0 Hx,i,j−1
−
+
∆x
∆y
(r − i ) ∂Eiz − (σ − σi )η0 Eiz −
c0
∂t t=(np−0.5)∆t
t=(np−0.5)∆t
#
σ η0
r
nm
Ez,ij
−
c0 ∆t
2
r
σ η0
+
c0 ∆t
2
−1
(9.50)
9.2.13 2D Incident/Scattered TE Discrete
np
Ex,ij
=
"
nm
nm
η0 Hz,i,j+1
− η0 Hz,i,j−1
+
∆y
σ η0
r
nm
−
Ex,ij
c0 ∆t
2
(r − i ) ∂Eix − (σ − σi )η0 Eix −
c0
∂t t=(np−0.5)∆t
t=(np−0.5)∆t
#
r
σ η0
+
c0 ∆t
2
−1
(9.51)
42
np
Ey,ij
np
η0 Hz,ij
=
=
"
nm
nm
η0 Hz,i−1,j
− η0 Hz,i+1,j
+
∆x
σ η0
r
nm
Ey,ij
−
c0 ∆t
2
(r − i ) ∂Eiy −
− (σ − σi )η0 Eiy c0
∂t t=(np−0.5)∆t
t=(np−0.5)∆t
"
np
np
np
np
c0 ∆t Ex,i,j+1 − Ex,i,j−1 Ey,i+1,j − Ey,i−1,j
−
µr
∆y
∆x
#
#
r
σ η0
+
c0 ∆t
2
−1
(µr − µi ) ∂Hiz nm
η0
+η0 Hz,ij
−
µr
∂t t=(np−0.5)∆t
(9.52)
(9.53)
9.2.14 3D Continuous
∂Hx
µr
η0
c0
∂t
∂Hy
µr
η0
c0
∂t
µr
∂Hz
η0
c0
∂t
=
=
=
r ∂Ex
+ σ η 0 Ex =
c0 ∂t
r ∂Ey
+ σ η 0 Ey =
c0 ∂t
r ∂Ez
+ σ η 0 Ez =
c0 ∂t
∂Ey
∂Ez
−
∂z
∂y
∂Ez
∂Ex
−
∂x
∂z
∂Ex ∂Ey
−
∂y
∂x
∂Hz
∂Hy
η0
−
∂y
∂z
∂Hx ∂Hz
η0
−
∂z
∂x
∂Hx
∂Hy
η0
−
∂x
∂y
(9.54)
(9.55)
(9.56)
(9.57)
(9.58)
(9.59)
9.2.15 3D Incident/Scattered Continuous
∂Hsx
µr
η0
c0
∂t
∂Hsy
µr
η0
c0
∂t
∂Hsz
µr
η0
c0
∂t
=
=
=
r ∂Esx
+ σ η0 Esx =
c0 ∂t
r ∂Esy
+ σ η0 Esy =
c0 ∂t
r ∂Esz
+ σ η0 Esz =
c0 ∂t
∂Hix
∂Esy
∂Esz
µr − µ i
η0
−
−
∂z
∂y
c0
∂t
∂Hiy
∂Esz
∂Esx µr − µi
η0
−
−
∂x
∂z
c0
∂t
∂Hiz
∂Esx ∂Esy
µr − µ i
η0
−
−
∂y
∂x
c0
∂t
∂Hsz
∂Hsy
r − i ∂Eix
η0
−
−
− (σ − σi ) η0 Eix
∂y
∂z
c0
∂t
∂Hsx ∂Hsz
r − i ∂Eiy
η0
−
−
− (σ − σi ) η0 Eiy
∂z
∂x
c0
∂t
∂Hsy
∂Hsx
r − i ∂Eiz
η0
−
−
− (σ − σi ) η0 Eiz
∂x
∂y
c0
∂t
(9.60)
(9.61)
(9.62)
(9.63)
(9.64)
(9.65)
(9.66)
43
9.2.16 3D PML Continuous
µr
c0
µr
c0
µr
c0
µr
c0
µr
c0
µr
c0
∂Hxz
σ∗
+ z η0 Hxz
∂t
η0
∗
σ
∂Hxy
y
η0
+ η0 Hxy
∂t
η0
∂Hyx σx∗
η0
+ η0 Hyx
∂t
η0
∂Hyz
σ∗
η0
+ z η0 Hyz
∂t
η0
σy∗
∂Hzy
η0
+ η0 Hzy
∂t
η0
∂Hzx σx∗
η0
+ η0 Hzx
∂t
η0
r ∂Exy
+ σy η0 Exy
c0 ∂t
r ∂Exz
+ σz η0 Exz
c0 ∂t
r ∂Eyz
+ σz η0 Eyz
c0 ∂t
r ∂Eyx
+ σx η0 Eyx
c0 ∂t
r ∂Ezx
+ σx η0 Ezx
c0 ∂t
r ∂Ezy
+ σy η0 Ezy
c0 ∂t
η0
=
=
=
=
=
=
=
=
=
=
=
=
∂Ey
∂z
∂Ez
−
∂y
∂Ez
∂x
∂Ex
−
∂z
∂Ex
∂y
∂Ey
−
∂x
∂Hz
η0
∂y
∂Hy
−η0
∂z
∂Hx
η0
∂z
∂Hz
−η0
∂x
∂Hy
η0
∂x
∂Hx
−η0
∂y
(9.67)
(9.68)
(9.69)
(9.70)
(9.71)
(9.72)
(9.73)
(9.74)
(9.75)
(9.76)
(9.77)
(9.78)
9.2.17 3D Discrete
np
η0 Hx,ijk
np
η0 Hy,ijk
np
η0 Hz,ijk
np
Ex,ijk
"
=
(9.79)
=
np
np
np
np
c0 ∆t Ez,i+1,jk − Ez,i−1,jk Ex,ij,k+1 − Ex,ij,k−1
nm
+ η0 Hy,ijk
−
µr
∆x
∆z
(9.80)
=
np
np
np
np
c0 ∆t Ex,i,j+1,k − Ex,i,j−1,k Ey,i+1,jk − Ey,i−1,jk
nm
+ η0 Hz,ijk
−
µr
∆y
∆x
(9.81)
=
"
"
=
"
#
"
#
nm
nm
nm
η0 Hz,i,j+1,k
− η0 Hz,i,j−1,k η0 Hy,i,j,k+1
− η0 Hy,i,j,k−1
−
∆y
∆z
nm
+Ex,ijk
np
Ey,ijk
#
np
np
np
np
c0 ∆t Ey,ij,k+1 − Ey,ij,k−1 Ez,i,j+1,k − Ez,i,j−1,k
nm
−
+ η0 Hx,ijk
µr
∆z
∆y
σ η0
r
−
c0 ∆t
2
# σ η0
r
+
c0 ∆t
2
−1
nm
nm
nm
− η0 Hz,i−1,jk
− η0 Hx,ij,k−1 η0 Hz,i+1,jk
η0 Hx,ij,k+1
−
∆z
∆x
(9.82)
44
nm
+Ey,ijk
np
Ez,ijk
=
"
σ η0
r
−
c0 ∆t
2
#
σ η0
r
+
c0 ∆t
2
nm
η0 Hy,i+1,jk
− η0 Hy,i−1,jk
∆x
nm
+Ez,ijk
r
σ η0
−
c0 ∆t
2
−
#
−1
(9.83)
nm
nm
η0 Hx,i,j+1,k
− η0 Hx,i,j−1,k
∆y
r
σ η0
+
c0 ∆t
2
−1
(9.84)
(9.85)
9.2.18 3D PML Discrete
np
η0 Hxz,ijk
np
η0 Hxy,ijk
np
η0 Hyx,ijk
np
η0 Hyz,ijk
np
η0 Hzy,ijk
np
η0 Hzx,ijk
np
Exy,ijk
np
Exz,ijk
np
Eyz,ijk
np
Eyx,ijk
np
Ezx,ijk
np
Ezy,ijk
=
=
=
=
=
=
=
=
=
=
=
=
"
"
"
"
"
"
"
"
"
"
"
"
np
np
Ey,ij,k+1
− Ey,ij,k−1
∆z
+
np
np
Ez,i,j−1,k
− Ez,i,j+1,k
∆y
nm
η0 Hxz,ijk
+
nm
η0 Hxy,ijk
np
np
Ez,i+1,jk
− Ez,i−1,jk
nm
+ η0 Hyx,ijk
np
np
Ex,ij,k−1
− Ex,ij,k+1
nm
η0 Hyz,ijk
∆x
∆z
+
np
np
Ex,i,j+1,k
− Ex,i,j−1,k
∆y
np
np
Ey,i−1,jk
− Ey,i+1,jk
∆x
+
+
nm
η0 Hzy,ijk
nm
η0 Hzx,ijk
µr
σ ∗ η0
− z
c0 ∆t
2
# σy∗ η0
µr
−
c0 ∆t
2
µr
σ ∗ η0
− x
c0 ∆t
2
µr
σ ∗ η0
− z
c0 ∆t
2
# # σy∗ η0
µr
−
c0 ∆t
2
µr
σ ∗ η0
− x
c0 ∆t
2
!#
!#
# nm
nm
− η0 Hz,i,j−1,k
η0 Hz,i,j+1,k
σy η0
r
nm
+ Exy,ijk
−
∆y
c0 ∆t
2
µr
σ ∗ η0
+ z
c0 ∆t
2
−1
σy∗ η0
µr
+
c0 ∆t
2
µr
σ ∗ η0
+ x
c0 ∆t
2
µr
σ ∗ η0
+ z
c0 ∆t
2
−1
−1
σy∗ η0
µr
+
c0 ∆t
2
µr
σ ∗ η0
+ x
c0 ∆t
2
# !−1
!−1
−1
σy η0
r
+
c0 ∆t
2
−1
# nm
nm
− η0 Hy,ij,k+1
η0 Hy,ij,k−1
r
r
σz η0
σz η0 −1
nm
+ Exz,ijk
−
+
∆z
c0 ∆t
2
c0 ∆t
2
# nm
nm
η0 Hx,ij,k+1
− η0 Hx,ij,k−1
r
r
σz η0
σz η0 −1
nm
+ Eyz,ijk
−
+
∆z
c0 ∆t
2
c0 ∆t
2
nm
nm
− η0 Hz,i+1,jk
η0 Hz,i−1,jk
r
σx η0
nm
+ Eyx,ijk
−
∆x
c0 ∆t
2
nm
nm
− η0 Hz,i−1,jk
η0 Hy,i+1,jk
r
σx η0
nm
+ Ezx,ijk
−
∆x
c0 ∆t
2
# # r
σx η0
+
c0 ∆t
2
r
σx η0
+
c0 ∆t
2
−1
−1
(9.86)
(9.87)
(9.88)
(9.89)
(9.90)
(9.91)
(9.92)
(9.93)
(9.94)
(9.95)
(9.96)
# nm
nm
− η0 Hx,i,j+1,k
η0 Hx,i,j−1,k
σy η0
σy η0 −1
r
r
nm
+ Ezy,ijk
−
+
(9.97)
∆x
c0 ∆t
2
c0 ∆t
2
45
9.2.19 3D Incident/Scatterd Discrete
np
η0 Hx,ijk
=
"
np
np
np
np
c0 ∆t Ey,ij,k+1 − Ey,ij,k−1 Ez,i,j+1,k − Ez,i,j−1,k
−
µr
∆z
∆y
nm
+η0 Hx,ijk
np
η0 Hy,ijk
=
"
np
Ex,ijk
=
=
(9.98)
np
np
np
np
c0 ∆t Ez,i+1,jk − Ez,i−1,jk Ex,ij,k+1 − Ex,ij,k−1
−
µr
∆x
∆z
nm
+η0 Hy,ijk
np
η0 Hz,ijk
(µr − µi ) ∂Hix η0
−
µr
∂t t=(np−0.5)∆t
"
#
(µr − µi ) ∂Hiy η0
−
µr
∂t t=(np−0.5)∆t
#
(9.99)
np
np
np
np
c0 ∆t Ex,i,j+1,k − Ex,i,j−1,k Ey,i+1,jk − Ey,i−1,jk
−
µr
∆y
∆x
#
(µr − µi ) ∂Hiz nm
+η0 Hz,ijk
−
η0
µr
∂t t=(np−0.5)∆t
"
(9.100)
nm
nm
nm
nm
η0 Hy,ij,k+1
− η0 Hy,ij,k−1
η0 Hz,i,j+1,k
− η0 Hz,i,j−1,k
−
∆y
∆z
r
σ η0
(r − i ) ∂Eix nm
−
+
Ex,ijk
−
c0 ∆t
2
c0
∂t t=(np−0.5)∆t
np
Ey,ijk
=
#
r
σ η0 −1
−(σ − σi )η0 Eix +
c0 ∆t
2
t=(np−0.5)∆t
"
nm
nm
nm
nm
η0 Hx,ij,k+1 − η0 Hx,ij,k−1 η0 Hz,i+1,jk − η0 Hz,i−1,jk
−
∆z
∆x
(r − i ) ∂Eiy r
σ η0
nm
+
Ey,ijk
−
−
c0 ∆t
2
c0
∂t t=(np−0.5)∆t
np
Ez,ijk
=
(9.101)
#
r
σ η0 −1
+
−(σ − σi )η0 Eiy c0 ∆t
2
t=(np−0.5)∆t
"
nm
nm
nm
(9.102)
nm
η0 Hy,i+1,jk − η0 Hy,i−1,jk η0 Hx,i,j+1,k − η0 Hx,i,j−1,k
−
∆x
∆y
r
σ η0
(r − i ) ∂Eiz nm
−
+
Ez,ijk
−
c0 ∆t
2
c0
∂t t=(np−0.5)∆t
−(σ − σi )η0 Eiz t=(np−0.5)∆t
#
r
σ η0
+
c0 ∆t
2
−1
(9.103)
9.3 Lumped Elements
This section describes how lumped elements are suppored in the FDTD code.
46
9.3.1
Resistor
The lumped resistor is implemented by just placing conductive cells in the
simulation. If the resistor occupies a single cell, the resistor is “lumped.”
If not, the resistor is “distributed.” When the bounds of the resistor are
defined, the outer coordinates are snapped to the nearest even (E field)
nodes. The required conductivity is then calculated using
σ=
` 1
,
R wd
(9.104)
where ` is the length of the resistor (in direction of current flow), R is the
resistance in ohms, and w and d are the width and depth.
Loaded Voltage Source
The vsrc command creates a voltage source with a series load.
-
V
+
9.3.2
R
Vs
Figure 9.2: Loaded Voltage Source Element
The voltage source supplies a current which is dependent on the voltage
seen at its terminals
I=
Vs − V
.
R
(9.105)
The user specifies a box containing the voltage source. The simulator
assumes that the current is constant (equal to 9.105) in the volume occupied
by the source. Assuming the current is directed in the x direction, the
current density at each point in the voltage element is
Jx =
(V s − Vx )/R
I
=
.
∆y∆z
∆y∆z
(9.106)
Next, write Ampere’s law anywhere in the voltage source as
r ∂Ex
+ σ η 0 Ex + J x
c0 ∂t
∂Hy
∂Hz
−
η0
∂y
∂z
r ∂Ex
(Vs − ∆xEx )/R
+ σ η 0 Ex +
c0 ∂t
∆y∆z
Vs
1 ∆x
r ∂Ex
Ex +
+ σ η0 −
c0 ∂t
R ∆y∆z
R∆y∆z
=
(9.107)
= f (H)
(9.108)
= f (H)
(9.109)
= f (H)
(9.110)
47
where f (H) has replaced everything depending on H fields. Also, note the
voltage (V ) across each cell has been replaced with E x ∆x. Next, perform
the standard discretization. To obtain E at the odd time step, just average
in time.
np
nm
1 ∆x
r Ex,ijk − Ex,ijk
+ ση0 −
c0
∆t
R ∆y∆z
np
nm
Ex,ijk
+ Ex,ijk
2
!
+
Vs
R∆y∆z
= f (H)
(9.111)
Next, write E for the current time step in terms of E for the previous time
step.
ση0
∆x
r
np
+
−
Ex,ijk
=
c0 ∆t
2
2R∆y∆z
ση0
∆x
r
nm
−
+
Ex,ijk
c0 ∆t
2
2R∆y∆z
Vs
+ f (H)
(9.112)
−
R∆y∆z
Our standard FDTD update equation will compute
ση0
r
+
c0 ∆t
2
np
Ex,ijk
=
ση0
r
−
c0 ∆t
2
nm
Ex,ijk
+ f (H)
(9.113)
where E represents an invalid E component since the source has not been
np
accounted for. Subtracting (∆x/(2R∆y∆z))E x,ijk
from both sides gives
r
ση0
∆x
np
+
−
Ex,ijk
=
c0 ∆t
2
2R∆y∆z
r
ση0
nm
−
Ex,ijk
c0 ∆t
2
∆x
np
−
Ex,ijk
+ f (H).
2R∆y∆z
(9.114)
Taking the difference of Equations 9.112 and 9.114 yields
ση0
∆x
r
np
np
+
−
Ex,ijk
− Ex,ijk
=
c0 ∆t
2
2R∆y∆z
Vs
ση0
∆x
r
nm
Ex,ijk
−
−
+
+ f (H)
c0 ∆t
2
2R∆y∆z
R∆y∆z
∆x
ση0
r
nm
Ex,ijk
+
−
−
E np − f (H).
c0 ∆t
2
2R∆y∆z x,ijk
(9.115)
48
Canceling the appropriate terms and solving for the current time step gives
np
np
Ex,ijk
= Ex,ijk
+
h
∆x
2R∆y∆z
nm + E np
Ex,ijk
x,ijk −
r
c0 ∆t
+
ση0
2
−
∆x
2R∆y∆z
Vs
R∆y∆z
i
(9.116)
which provides the correction factor to convert the partially updated field
(E) to the actual field (E).
9.4 Sources
This section explains how the various sources are excited in the simulation grid.
9.4.1
Time Windows
Time windows help avoid transient behavior in a simulation.
Gaussian Window
The Gaussian window has the following form:
2
W (t) = 1 − e−(t/τ ) .
(9.117)
Given the 99% rise time, the parameter τ is found as
9.4.2
RT
τ = p 99% .
ln(100)
(9.118)
Forced Plane Source
Planar sources in general consist of a shape function and a propagation
function. The shape function (S) defines the field in a plane transverse to
the direction of propagation. The propagation function (P ) defines how
planes of constant phase move over time. The complete source function is
given as
F (x, y, z, t) = <{S(x, y)P (z, t)}
(9.119)
where x and y define a point in the local reference plane, z is the direction
of propagation, and t is a time value.
The user specifies two coordinates denoting the corners of the desired excitation plane. Since FDTD uses a staggered grid, and the user may choose
arbitrary coordinates, certain field components will not lie in the specified
plane. The simulator chooses the nearest compatible plane (parallel to the
specified excitation plane) containing each component.
A point list is generated for each field component to be forced. The point
list contains an entry for each location where the field component exists in
49
the excitation plane. Each entry stores the distance to the reference plane
and the value of the shape function. The shape function is computed by
projecting the spatial coordinate onto the reference plane and evaluating
S(x, y). During the simulation, the propagation function is evaluated using
the current time step and the distance to the reference plane. The real part
of this value times the shape value is stored in the field element.
Forced sources overwrite the E and H values in the excitation plane which
are originally written by the standard update equations. These sources
present a zero-field condition for incident fields, which may be undesirable.
Since a forced planar source is only forced in a single plane, two symmetric
plane-waves will be created propagating in opposite directions from the
excitation plane.
9.4.3
Additive Plane Source
Planar sources may also be created by adding a value for E or H to the
existing value rather than overwriting it. This corresponds to an electric
current sheet or magnetic current sheet, respectively. The simulator computes what the current must be in order to obtain a plane wave of correct
amplitude.
Assume that we wish to excite a plane wave propagating in the z direction
polarized with electric field in the x direction. The E and H fields for our
plane wave will have the form
Ex,src (z) = E0 (x, y)e−jkz |z−z0 |
Hy,src (z) = sgn(z − z0 )H0 (x, y)e−jkz |z−z0 |
(9.120)
where kz is the propagation constant and z0 is the reference plane. Note
that this corresponds to two symmetric plane waves radiating out from the
plane where our current is specified. The discrete update equation for E x
in this plane is
np
Ex,ijk
=
"
nm
nm
nm
η0 Hz,i,j+1,k
− η0 Hz,i,j−1,k η0 Hy,i,j,k+1
− η0 Hy,i,j,k−1
−
∆y
∆z
nm
+Ex,ijk
σ η0
r
−
c0 ∆t
2
# r
σ η0
+
c0 ∆t
2
−1
+ Ex,add
(9.121)
where Ex,add needs to be found to generate 9.120. Substituting values for
the source and noting that Hy,i,j,k−1 = −Hy,i,j,k+1, we obtain
np
Ex,ijk
=
"
nm
nm
− η0 Hz,i,j−1,k 2η0 Hy,i,j,k+1
η0 Hz,i,j+1,k
−
∆y
∆z
(9.122)
50
nm
+Ex,ijk
σ η0
r
−
c0 ∆t
2
#
σ η0
r
+
c0 ∆t
2
−1
+ Ex,add
where E and H are the source E and H fields to be excited. Adding and
subtracting η0 Hz,i,j,k−1/∆y inside the brackets gives
np
Ex,ijk
−
"
nm
nm
nm
− η0 Hy,i,j,k−1
η0 Hz,i,j+1,k
− η0 Hz,i,j−1,k η0 Hy,i,j,k+1
−
∆y
∆z
+
= −
"
nm
Ex,ijk
r
σ η0
−
c0 ∆t
2
#
σ η0
r
+
c0 ∆t
2
−1
(9.123)
#
nm
nm
η0 Hy,i,j,k+1
+ η0 Hy,i,j,k−1
σ η0 −1
r
+
+ Ex,add .
∆z
c0 ∆t
2
Since the source (presumably) satisfies Maxwell’s equations, the expression
on the left hand side of the equation goes to zero, and we obtain
Ex,add
"
nm
nm
+ η0 Hy,i,j,k−1
η0 Hy,i,j,k+1
=
∆z
#
r
σ η0
+
c0 ∆t
2
−1
.
(9.124)
Similar equations can be derived for other field components and different
propagation directions using the following convention:
1. For additive Edir or Hdir source, use the update equation for E dir or Hdir ,
respectively.
2. Additive component will be of the form
(E, H)add
"
nm
η0 (H, E)nm
i+1 + η0 (H, E)i−1
=s
∆
#
r
σ η0
+
c0 ∆t
2
−1
.
3. The component on the right hand side is the one differenced in the propagation direction, and i is the index in the propagation direction.
4. The sign s is chosen as the sign opposite the one in front of the i + 1
component in the update equation.
9.5 Power Scattering/Absorption
This section explains the equations used to compute power scattered out of a box and
power absorbed inside of a box.
9.5.1
Power Absorption
Power absorption is calculated by considering the inifinitesimal cylinder
depicted below.
51
J
σ
A
L
(a)
Figure 9.3: Volume used for power absorption calculation
For a cylinder of finite size with constant current, we have
Pa =
1 2
|I| R
2
I = JA = σE · A
(9.125)
Solving for absorbed power we have
Pa =
=
=
1
|σE · A|2
2
1 2
|E| σLA
2
1 2
|E| σV.
2
L
σA
(9.126)
(9.127)
(9.128)
In terms of differentials, we have
Pa =
9.5.2
1
2
Z
σ|E|2 dV.
(9.129)
V
Total Scattered Power
To compute scattered power, we compute the time-harmonic Poynting vector on the surface of a box and integrate the normal component.
Ps =
=
=
I
1
∗
<
E × H · ds
2
IS
1
∗
(3D)
<
n̂ · (E × H )dS
2
IS
1
∗
n̂ · (E × H )d`
<
(2D)
2
c
(9.130)
(9.131)
(9.132)
52
y
Ez Hx - Ex Hz
z
Ex Hy - Ey Hx
-Ey Hz + Ez Hy
-x
y
x
Ey Hz - Ez Hy
-x
-Ey Hz + Ez Hy
x
Ey Hz - Ez Hy
-Ez Hx + Ex Hz
-Ez Hx + Ex Hz
-Ex Hy + Ey Hx
Ez Hx - Ex Hz
-y
-z
(a) 2D
(b) 3D
Figure 9.4: Box used for computing total power scattered in the 2D and
3D simulators.
x̂
Ex
Hx
ŷ
ẑ E ×H =
Ey Ez Hy Hz = x̂(Ey Hz − Ez Hy ) + ŷ(Ez Hx − Ex Hz )
+ẑ(Ex Hy − Ey Hx )
9.5.3
(9.133)
(9.134)
Scattering/Absorption Cross-Sections
This section gives the conversion from total scattered/absorbed power to
scattering and absorption cross-sections for a plane wave.
Assume an incident plane wave with electric-field peak amplitude E 0 . Time
harmonic electric field is
Ei = E 0
V
∆
(9.135)
where V /∆ specifies units of volts per length. Incident power denisity is
given as
Si =
1 2 1 E02 W
|E| =
.
2
2 η0 ∆2
(9.136)
Next, we define absorption and scattering cross sections as
σa =
Pa
Si
∆2
(9.137)
53
σs =
Ps
Si
∆2
(9.138)
which by substitution are found to be
σa =
σs =
2Pa η0
E02
2Ps η0
E02
∆2
(9.139)
∆2 .
(9.140)
9.6 Geometry
The FDTD interpreter contains code to handle several geometric constructs. This
section outlines the theory behind the required operations.
9.6.1
Coordinate Systems
Parts of the code require transformations from cartesian coordinates to
spherical coordinates or vice versa. The following equations are used to
convert scattered farfields from spherical coordinates to cartesian coordinates:
θ̂ = x̂ cos θ cos φ + ŷ cos θ sin φ − ẑ sin θ
(9.141)
r̂ = x̂ sin θ cos φ + ŷ sin θ sin φ + ẑ cos θ
(9.143)
Ex = x̂ · (Eθ θ̂ + Eφ φ̂)
(9.144)
φ̂ = −x̂ sin φ + ŷ cos φ
(9.142)
= Eθ cos θ cos φ − Eφ sin φ
(9.145)
= Eθ cos θ sin φ + Eφ cos φ
(9.147)
Ey = ŷ · (Eθ θ̂ + Eφ φ̂)
Ez = ẑ · (Eθ θ̂ + Eφ φ̂)
= −Eθ sin θ
(9.146)
(9.148)
(9.149)
9.7 Complex Dielectric Constant
To perform time-domain analysis of structures, we need to convert complex dielectric
constants to real permittivity and conductivity using the relation
er = r − j
σc0 η0
ω
(9.150)
54
9.8 DFT
Time domain fields are converted to the frequency domain using the DFT. For a
time-domain field quantity
X
x[n] =
ak ej
2πkn
N
,
(9.151)
k=<N >
where < N > denotes summation over a single period, the corresponding steady state
coefficients are
ak =
1
N
X
x[n]e−j
2πkn
N
.
(9.152)
n=<N >
9.9 Units
This section provides the units that are used for physical quantities.
∆ = Distance unit
(9.153)
∆t = Time unit
(9.154)
∆x ∼ ∆
(9.155)
∆z ∼ ∆
V
E ∼
∆
V
η0 H ∼
∆
η0 ∼ Ω
∆
c0 ∼
∆t
r ∼ 1
(9.157)
∆y ∼ ∆
µr ∼ 1
σr = σ η 0 c0 ∼ 1
1
σ ∼
Ω∆
Pa ∼ W
Ps ∼ W
(9.156)
(9.158)
(9.159)
(9.160)
(9.161)
(9.162)
(9.163)
(9.164)
(9.165)
(9.166)
(9.167)
55
Chapter 3: MIEV Tool
1 Introduction
This chapter explains the MIEV tool. This tool provides a MATLAB/Octave front-end for
Wiscombe’s useful Mie scatterting calculator.
2 Octave Functions
This section describes the octave routines which are part of this tool.
2.1 miev
Syntax:
[qext qsca s1 s2] = miev(chi, eps, ang) ;
Inputs:
chi
Scattering efficiency. The scattering efficiency is radius of the scatter times the propagation constant
in the background medium (χ = kb a = 2πa/λb ).
eps
Dielectric constant of the scattering sphere assuming the background to be free space. A background
which is not free space may be accomodated by letting = sphere /bkg .
ang
Angles over which to compute scattered fields (radians).
qext
Extinction (scattering + absorption) efficiency factor, which is the ratio of the extinction cross section
to the physical cross section. σe = qext πa2 .
qsca
Scattering efficiency. σs = qsca πa2 .
s1
Power scattered to far field as a function of angle
for E polarized perpendicular (H) to the plane of
incidence. Units are W/λ2b .
s2
Power scattered for E polarized parallel (V) to the
plane of incidence. Units are W/λ2b .
Outputs:
Description: This command computes the Mie scattering cross sections and scattered fields for a sphere of specified size. Any one of the input arguments may be a vector or matrix and the others should be scalars.
Thus, the function can compute scattering across sphere sizes, dielectric constants, or anlges.
3 Matlab Functions
This section describes the matlab routines which are part of the tool.
56
3.1 miev
Syntax:
[qext qsca s1 s2] = miev(chi, eps, ang) ;
Description: See description of octave function in Section 2.1.
4 C/C++ Library Functions
This section describes the functions which are compiled into libmiev.a.
4.1 mieScat
Syntax:
void mieScat(
double chi,
Complex eps,
const MatrixClass& angles,
double& qext out,
double& qscat out,
MatrixClass& s1 out,
MatrixClass& s2 out);
Description: C++ Function. Computes the Mie scattering parameters for the
sphere of interest. See Section 2.1 for a description of the parameters.
57
Chapter 4: MODE Tool
1 Introduction
This chapter describes the MODE tool, a 2D waveguide mode solver. The user provides a
mesh of relative permittivities, and the tool generates a set of finite difference equations in
sparse format to be solved. For a description of the sparse format see Section 2 in Chapter 8.
2 Octave Functions
This section describes the Octave functions which are part of the MODE tool.
2.1 mode eig
Syntax:
[a d] = mode eig(x, y, bound, eps) ;
Inputs:
x, y
Dimensions of the simulation region (in free space
wavelengths).
bound
Specifies the type of boundary at the domain edge.
0: Force fields on
√ the boundary to 0.
1: Assume a 1/ R decay at the boundary.
eps
Matrix of relative permittivity values. The row dimension is the y direction and the column dimension
is the x direction.
a
Sparse field coefficient matrix.
d
Matrix dimension information. To form a matrix
equation, the field components must be stacked
into a vector. This matrix stores information on
how the stacking was done. Each field component
is stored in matrix form with the row dimension
corresponding to y and the column dimension
corresponding to x. Each component is stacked
columnwise into a vector.
Outputs:
The d matrix has the following format:
Ex start
Ey start
Ez start
Hx start
Hy start
Hz start
Ex end
Ey end
Ez end
Hx end
Hy end
Hz end
Ex rows
Ey rows
Ez rows
Hx rows
Hy rows
Hz rows
Ex columns
Ey columns
Ez columns
Hx columns
Hy columns
Hz columns
58
Description: This command generates an eigenvalue problem in sparse format for
the 2D structure: Af = βz f .
2.2 mode lin
Syntax:
[m r d] = mode lin(x, y, bz, bound, eps, force) ;
Inputs:
x, y
Dimensions of the simulation region (in free space
wavelengths).
bz
ẑ propagation constant.
bound
Specifies the type of boundary at the domain edge.
0: Force fields on
to 0.
√ the boundary
√
− βz2 −(2πnb )2 R
1: Assume a e
/ R decay.
eps
Matrix of relative permittivity values. The row dimension is the y direction and the column dimension
is the x direction.
force
Matrix of field points to force. Each row specifies a
field point in space to force and has the format [type
x y val] where
type is 1=Ex , 2=Ey , 3=Ez , 4=Hx , 5=Hy , 6=Hz
(x, y) is the coordinate to force relative to the center
val is the value to force (usually 1 or 0).
m
Equation matrix in sparse format.
r
RHS vector.
d
Stacked matrix dimension information (see Section
2.1 for format).
Outputs:
Description: This command generates an linear equation problem in sparse format
for the 2D structure: M f = r.
2.3 resample
Syntax:
[ex ey ez hx hy hz] = resample(ex1, ey1, ez1, hx1, hy1,
hz1, Nx, Ny) ;
[ex] = resample(ex1, xr1, yr1, xr2, Nx2, yr2, Ny2) ;
Inputs:
ex1, ey1, ez1,
hx1, hy1, hz1
Input sample grids. Dimensions are inferred from
the sizes of the matrix.
Nx, Ny
Number of cells in the new matrix
ex, ey, ez, hx,
hy, hz
New grid with the field components colocated at the
center of each cell.
Outputs:
59
Description: This function resamples a staggered FD grid onto a common grid using
linear interpolation.
60
Chapter 5: PLOT Tools
1 Introduction
This chapter describes the use of the PLOT tools.
2 Octave Functions
2.1 plotfield
Syntax:
plotfield(x, y, zx, zy, zz {, pix x, pix y} ) ;
Inputs:
x
x coordinates corresponding to columns in the z matrix.
y
y coordinates corresponding to rows in the z matrix.
zx
Matrix of vector x̂ components.
zy
Matrix of vector ŷ components.
zz
Matrix of vector ẑ components. Set to the empty
matrix [ ] if the vector field is 2D.
pix x
Optional width of the plot in pixels.
pix y
Optional height of the plot in pixels.
Description: This command plots the vector field (zx x̂ + zy ŷ + zz ẑ)[x, y]. The
vector field may be specified as 2D by making zz the empty matrix.
2.2 plotimg
Syntax:
plotimg(x, y, z, {, pix x, pix y, grad type} ) ;
Inputs:
x
x coordinates corresponding to columns in the z matrix.
y
y coordinates corresponding to rows in the z matrix.
z
Matrix of (real) scalar values z[x, y].
pix x
Optional width of the plot in pixels.
pix y
Optional height of the plot in pixels.
grad type
Gradient type: 0=Black and White, 1=Color.
61
Description: This command plots the scalar function z[x, y] on a 2D map using a
color gradient.
3 Shell Functions
This section describes functions available from the UNIX shell.
3.1 plotfile
Syntax:
plotfile [filename] {[width] {[height] {[grad]}}}
Parameters: filename
Name of the plotfile to plot.
width
Width of the plot in pixels.
height
Height of the plot in pixels.
grad
Type of gradient to use. 0=BW, 1=Color.
Description: This function allows plot files to be viewed from the UNIX shell. Plot
files are generated by the FDTD simulator plotfile command or
other programs that use the plotfile capabilities of the C++ plot library.
62
Chapter 6: QCA-CP Tool
1 Introduction
This chapter explains the functions that are part of the QCA-CP tool. This tool is useful
for computing scattering and absorption in a random medium containing densely-packed
dielectric spheres.
2 Octave Functions
2.1 percus
Syntax:
[g] = percus(f, x) ;
Inputs:
f
Scalar fill fraction. Note: 0 < f < 1.
x
Displacement of sphere centers (in sphere diameters). This value should be greater than 1 to have
physical meaning. May be a vector or matrix.
g
Potential values.
Outputs:
Description: This function computes the Percus-Yevick pairwise distribution function. Note that because of the way the function is computed, it is
sensitive to values of x which are large or close to 1.
2.2 qca cp
Syntax:
[K] = qca cp(f, a, eps) ;
Inputs:
f
Fill fraction of the spheres (0 < f < 1).
a
Radius of spheres (in wavelengths).
eps
(Possibly complex) dielectric constant for spheres
assuming free space background.
K
Complex effective propagation constant. Units are
rad/λb . The imaginary part represents a loss which
is due to absorption (if eps is complex) and scattering.
Outputs:
Description: This command computes the effective propagation constant for a random medium consisting of densely-packed dielectric spheres. The function searches for K using Muller’s method with the closed-form lowfrequency solution as an initial guess.
63
2.3 w3j
Syntax:
[b] = w3j(l1, l2, l3, m1, m2, m3) ;
Inputs:
l1, l2, l3, m1,
m2
Wigner-3j parameters.
Outputs:
b
Output value of function.
Description: This function returns the Wigner-3j symbols for
l1 l2
l3
m1 m2 −(m1 + m2)
!
.
64
Chapter 7: Radiative Transfer
1 Introduction
The Radiative Transfer tool simulates active and passive electromagnetic propagation through
a layered medium.
2 M-Files
This section describes the .M files that are part of this tool.
2.1 active mult
Syntax:
[sigma0 ang dv] = active mult(L, N, M, Ppoi, mu P, n, kei,
d, debug);
Inputs:
L
Number of scattering layers.
N
Number of look angles.
M
Number of azmimuth angles.
Ppoi
Structure containing the phase matrix for each scattering layer in the plane of incidece.
Ppoi.l[l] = Block vector containing the phase matrix
in the lth layer. l = {1, 2, . . .}. Each 4 × 4 block in
the vector corresponds to the phase matrix at an
angle cosine in mu P. Units are 1/length 3 .
mu P
Structure containing the angle cosines at which Ppoi
is defined in each layer.
mu P.l[l] = Vector of angle cosines for the l th layer.
l = {1, 2, . . .}.
n
Vector of effective indices of refraction for each layer:
n(1) = Index of refraction of the homogeneous top
layer (usually air = 1).
n(l + 1) = Index of refraction of the l th scattering
layer.
n(L + 2) = Index of refration of the homogeneous
bottom layer.
kei
Vector containing the isotropic extinction coefficient
of each scattering layer. Units are 1/length.
d
Vector containing the depth of each scattering layer.
Units are length.
debug
If set, a debug structure dv is created.
65
Outputs:
sigma0
Matrix containing backscatter coefficients looking
into the top medium for the various polarizations.
Each row is a different look angle (corresponding
to an element in ang. The column number determines polarization: 1=V→V, 2=V→H, 3=H→V,
4=H→H.
ang
Vector of angles that were used (in radians).
dv
Structure containing debug information.
Description: This command solves for the active backscatter as a function of angle
for a multiple layer radiative transfer model.
2.2 active single
Syntax:
[sigma0 ang dv] = active single(N, M, Ppoi, mu P, n1, n2,
n3, kei, d, debug) ;
Inputs:
N
Number of look angles.
M
Number of azimuth angles.
Ppoi
Block vector containing the phase matrix in the
plane of incidence for the single scattering layer.
Each 4 × 4 block in the vector corresponds to an
angle cosine in mu P. Units are 1/length 3 .
mu P
Vector of angle cosines at which Ppoi is defined.
n1
Index of refraction of the homogeneous top layer
(usually air = 1).
n2
Effective index of refraction of the scattering layer.
n3
Index of refraction of the homogeneous bottom
layer.
kei
Isotropic extinction coefficient for the scattering
layer. Units are 1/length.
d
Depth of the scattering layer (length units).
debug
Flag. If set, debug information is stored in structure
dv.
sigma0
Backscatter coefficients. See Section 2.1 for format.
ang
Angles at which sigma0 is defined (in radians).
dv
Structure containing debug information.
Outputs:
66
Description: This function computes the active backscatter for a single scattering
layer radiative transfer model.
2.3 keRay
Syntax:
[ks ka] = keRay(f, a, eps s, eps b) ;
Inputs:
f
Fill fraction.
a
Radius of spheres (in wavelengths).
eps s
Dielectric constant of scatterers.
eps b
Dielectric constant of the background.
ks
Scattering coefficient (units 1/λ b ).
ka
Absorption coefficient (units 1/λ b ).
Outputs:
Description: Computes the scattering and absorption coefficients for Rayleigh
spheres.
2.4 mie
Syntax:
[eth ephi] = mie(eps, a, freq, c0, kvec, evec, th, phi) ;
Inputs:
eps
Dielectric constant of the sphere assuming a free
space background.
a
Radius of the sphere. Units are length.
freq
Frequency of illumination. Units are 1/time.
c0
Background wave speed. Units are length/time.
kvec
3D unit vector for the propagation direction
[kx , ky , kz ].
evec
3D unit vector for the polarization of the incident
E field.
th
Sample angles in theta for scattered far field.
phi
Sample angles in phi for scattered far field.
eth
Vector of scattered electric field in the θ̂ direction.
ephi
Vector of scattered electric field in the φ̂ direction.
Outputs:
Description: Computes the scattering of electric field from a single Mie sphere.
67
2.5 mie phase
Syntax:
[ke ks p11 p22 ang] = mie phase(eps, a, f, n) ;
Inputs:
eps
Dielectric constant of spheres.
a
Radius of spheres (in wavelengths).
f
Fractional volume of spheres.
n
Number of look angles to compute over.
ke
Extinction coefficient.
ks
Scattering coefficient.
p11
Vector containing P11 as a function of angle in the
plane of incidence.
p22
Vector containing P22 as a function of angle in the
plane of incidence.
ang
Angles over which p11 and p22 were computed.
Outputs:
Description: Computes the phase matrix elements P 11 and P22 for a collection of
Mie spheres.
2.6 mieq
Syntax:
[sigma a sigma s] = mieq(eps, sigma, a, freq, c0);
Inputs:
eps
Dielectric constant of the sphere.
sigma
Conductivity of the sphere.
a
Radius of the sphere.
freq
Frequency of illumination.
c0
Wave speed.
sigma a
Absorption cross section of sphere.
sigma s
Scattering cross section of sphere.
Outputs:
Description: Returns absorption and scattering cross sections for a Mie sphere.
68
2.7 passive mult
Syntax:
[Tb ang dv] = passive mult(L, N, M, Ppoi, mu P, n, T, kei,
kai, d, debug);
Inputs:
L
Number of scattering layers.
N
Number of look angles.
M
Number of azmimuth angles.
Ppoi
Structure containing the phase matrix for each scattering layer in the plane of incidece.
Ppoi.l[l] = Block vector containing the phase matrix
in the lth layer. l = {1, 2, . . .}. Each 2 × 2 block in
the vector corresponds to the phase matrix at an
angle cosine in mu P. Units are 1/length 3 .
mu P
Structure containing the angle cosines at which Ppoi
is defined in each layer.
mu P.l[l] = Vector of angle cosines for the l th layer.
l = {1, 2, . . .}.
n
Vector of effective indices of refraction for each layer:
n(1) = Index of refraction of the homogeneous top
layer (usually air = 1).
n(l + 1) = Index of refraction of the l th scattering
layer.
n(L + 2) = Index of refration of the homogeneous
bottom layer.
T
Vector containing the physical temperature (deg K)
of each layer.
T (1) = Temperature of the top homogeneous layer.
T (l + 1) = Temperature of the lth scattering layer.
T (L+2) = Temperature of the bottom homogeneous
layer.
kei
Vector containing the isotropic extinction coefficient
of each scattering layer. Units are 1/length.
kai
Vector containing the absorption (emission) coefficient of each scattering layer.
d
Vector containing the depth of each scattering layer.
Units are length.
debug
If set, a debug structure dv is created.
69
Outputs:
Tb
Matrix containing brightness temperature values.
Each row is a different look angle (corresponding
to an element in ang. The column index determines
polarization: 1=V 2=H.
ang
Vector of angles that were used (in radians).
dv
Structure containing debug information.
Description: Computes brightness temperature according to a multiple-layer passive radiative transfer model.
2.8 passive single
Syntax:
[Tb ang dv] = passive single(N, M, Ppoi, mu P, n1, n2, n3,
T1, T2, T3, kei, kai, d, debug);
Inputs:
N
Number of look angles.
M
Number of azimuth angles.
Ppoi
Block vector containing the phase matrix in the
plane of incidence for the single scattering layer.
Each 2 × 2 block in the vector corresponds to an
angle cosine in mu P. Units are 1/length 3 .
mu P
Vector of angle cosines at which Ppoi is defined.
n1, n2, n3
Index of refraction of top homogeneous layer, scattering layer, and bottom homogeneous layer.
T1, T2, T3
Physical temperature of the top homogeneous layer,
scattering layer, and bottom homogeneous layer.
kei
Isotropic extinction coefficient for the scattering
layer. Units are 1/length.
kai
Isotropic absorption (emission) coefficient for the
scattering layer.
d
Depth of the scattering layer (length units).
debug
Flag. If set, debug information is stored in structure
dv.
Tb
Brightness temperatures. See Section 2.7 for format.
ang
Angles at which Tb is defined (in radians).
dv
Structure containing debug information.
Outputs:
70
Description: Returns the brightness temperature according to a single scattering
layer passive radiative transfer model.
2.9 phaseMiePoi
Syntax:
[P ke ks] = phaseMiePoi(mu, a, eps, f) ;
Inputs:
mu
Angle cosines over which to compute the phase matrix.
a
Radius of spheres in wavelengths.
eps
Dielectric constant of spheres.
f
Fill fraction of spheres.
P
Phase matrix in the plane of incidence scaled by
1/ks.
ke
Extinction coefficient for independent scattering
1/lambda.
ka
Absorption coefficient for independent scattering
1/lambda.
Outputs:
Description: This function returns the phase matrix in the plane of incidence and
the extinction and scattering coefficients for a random medium of Mie
spheres.
2.10phaseRayPoi
Syntax:
[P] = phaseRayPoi(mu) ;
Inputs:
mu
Vector of angle cosines.
Outputs:
P
Phase matrix in plane of incidence scaled by 1/ks.
Description: This function returns the phase matrix in the plane of incidence for a
random medium of Rayleigh spheres.
3 Octave Functions
This section describes the Octave functions that are part of this tool.
3.1 interpVec
Syntax:
[w1 i1 w2 i2] = interpVec(x, x vec) ;
Inputs:
x
Real point where value of function is wanted.
x vec
Vector of points where the function is defined.
71
Outputs:
w1, w2
Weights of the points used in the interpolation.
i1 i2
Indices of the points used in the interpolation.
Description: This function returns the weights and indices which are required to
perform a linear interpolation operation on the vector x vec at the
real point x. The interpolated value is obtained by computing f (x) =
w1 ∗ x vec[i1] + w2 ∗ x vec[i2].
3.2 phaseRot
Syntax:
[P] = phaseRot(mu, Ppoi, muo, w, phi {, pflag }) ;
Inputs:
mu
A vector containing the cosines of the angles at
which the phase matrix in the plane of incidence
Ppoi is defined.
Ppoi
Block vector containing the phase matrix in the
plane of incidence. The matrix should be a block
column vector, where each row is a 4 × 4 phase matrix. Each block corresponds to an element of mu.
muo
Downward range of angle cosines for incident and
scattered angles where P will be calculated.
w
Corresponding summation weights for points in
muo.
phi
Scalar representing the scattered azimuth angle.
The incident azimuth angle is fixed at 0.
pflag
If set, only the first two stokes parameters are returned.
P
Block matrix containing the phase matrices at each
incident and scattered look angle. Indices are
P [n, n0 ][., .], where n0 is a incident angle index and
n is a scattered angle index, and [., .] refers to the
4 × 4 or 2 × 2 single angle phase matrix.
Outputs:
Description: This command takes a phase matrix defined in the plane of incidence
and rotates it to obtain the phase matrix at all desired incident and
scattered look angles. The incident and scattered azimuth angles are
fixed. Note that the function returns the full integrated phase matrix,
which allows the matrix to be used directly in the discretized radiative
transfer equations.
3.3 planeSurf
Syntax:
[R mup] = planeSurf(mu, med, n1, n2, {,pflag}) ;
72
Inputs:
Outputs
mu
Cosine of downward angles in the range [−1, 0]
where the reflection/transmission matrix should be
computed.
med
Flag indicating which medium the angles are defined
in (1=region1, 2=region2). If med = 0, the same
angles are used for both sides of the interface, and
the transmission function is interpolated.
n1
Index of refraction of the top layer
n2
Index of refraction of the bottom layer
pflag
Flag: If nonzero indicates that only the first two
stokes parameters are returned. Used for passive
radiative transfer.
R
Reflection/transmission matrix.
mup
Transmitted downward angle cosines (for angles opposite medium where angles were defined) if med=1
or 2.
Description: This command returns the reflection/transmission matrix for a planar
(Fresnel) interface. The returned reflection/transmission matrix is a
block matrix containing reflection and transmission matrices seen in
each medium at the interface.
R=
"
T12 R21
R12 T21
#
73
Chapter 8: SPARSE Tool
1 Introduction
The Sparse Tool provides basic functions for manipulating sparse matrices, which arise in
practice from systems of finite-difference equations. This toolkit borrows from SuperLU
and ARPACK libraries to support matrix inversion and eigenvalue/eigenvector searches.
2 Sparse Format
The Sparse format that was chosen provides a tradeoff between readibility and compactness.
The compressed sparse matrix contains a single descriptor row defining the size of the matrix.
Then, each nonzero element of the full matrix is described using an additional row. A matrix
with M nonzero elements would have the following representation
Nrows
row1
row2
..
.
Ncolumns
column1
column2
unused
value1
value2
..
.
rowM
columnM
valueM
,
where row m , columnm , and valuem are the row, column, and value of the m th nonzero
element. Note that the row and column indices are 1-indexed. Also, as a convention, elements
are defined in column order, i.e., nonzero entries begin with the first column (in order of
ascending rows), followed by the second column, etc.
3 Octave Functions
3.1 full
Syntax:
[x] = full(y) ;
Inputs:
y
A matrix in sparse format.
Outputs:
x
A full matrix.
Description: This function generates a full matrix out of a sparse matrix.
3.2 printMatrix
Syntax:
printMatrix(fn, A) ;
Inputs:
fn
Filename to dump matrix in.
A
Matrix to print.
74
Description: This function prints a matrix to a file for debug purposes. The matrix
is stored in ASCII format with the rows and columns labeled appropriately.
3.3 sparse
Syntax:
[x] = sparse(y) ;
Inputs:
y
Full matrix to convert.
Outputs:
x
Resulting sparse matrix.
Description: This function generates a sparse matrix from a standard full matrix.
If elements are not identically zero, and entry is created in the sparse
matrix.
3.4 sparse areig
Syntax:
[d v] = sparse areig(N, A, B, {, type, tol, maxit,
sigma});
Inputs:
N
Number of eigenvalues/eigenvectors to find.
A
Sparse matrix.
B
Sparse matrix (Symmetric and PSD) for general
eigenvalues. Pass in [ ] for standard eigenvalues.
type
Type of problem to solve.
This is the criterion used when searching for N eigenvalues.
’LA’ Largest algebraic value
’SA’ Smallest algebraic value
’LM’ Largest magnitude
’SM’ Smallest magnitude
’LR’ Largest real part
’SR’ Smallest real part
’LI’
Largest imaginary part
’SI’
Smallest imaginary part
’BE’ Both ends (largest/smallest magnitude)
tol
Tolerance. Specifies the accuracy of the eigenvalues.
maxit
Maximum number of iterations to perform before
stopping.
75
Outputs:
sigma
Shift factor. This parameter allows the search to
zoom in on a particular region of the eigenvalue
spectrum. The eigenvalue problem is transformed
using (A−σI)−1 v = νv for standard eigenvalues and
(A − σB)−1 v = νv for general eigenvalues. Now, for
example, searching for eigenvalues of largest magnitude will yield eigenvalues closest to σ.
d
Vector of eigenvalues.
v
Matrix of eigenvectors (one per column).
Description: This function solves for either standard or general eigenvalues using
the ARPACK/ARPACK++ library routines. Standard eigenvalues satisfy the equation
Av = λv,
where λ is the eigenvalue and v is the corresponding eigenvector. A is
a general matrix. General eigenvalues satisfy the equation
Av = λBv,
where A is general and B must be symmetric and positive semidefinite.
3.5 sparse diag
Syntax:
[x] = sparse diag(y) ;
Inputs:
y
Sparse matrix.
Outputs:
x
Full vector containing the diagonal.
Description: This function extracts the diagonal of a sparse matrix, returning a full
vector.
3.6 sparse lu
Syntax:
[{L U} x {pr pc id}] = sparse lu(A, {, b, perm, thres,
equ, id in});
Inputs:
A
Sparse matrix to factor.
b
RHS of equation. Pass [ ] if only the LU decomposition is required.
perm
Type
of
permutation
to
use.
0 Natural ording Pc = I
1 MMD applied to A0 A (works well for FD)
2 MMD applied to A + A0
76
Outputs:
thres
Threshold for pivoting.
0 <= thres <= 1.
0 Use user provided pivot or diagonal pivot
1 Classical partial pivoting
equ
Flag: If nonzero, equilibrate matrix to attempt to
reduce condition number.
id in
ID of a previous LU decomposition. Should save
time by saving key variables. If several problems
with the same A matrix are to be solved, the LU
decomposition can be found once. Then, the problem can be solved quickly by passing in different b
vectors and the ID of the first run.
L, U
Lower and upper triangular matrices stored in
sparse format.
x
Solution to equation if vector b was provided.
pr, pc
Row and column permutation matrices.
id
ID that can be used to refactor a matrix.
Description: This function uses the SuperLU package to either solve the equation
Ax = b or perform a sparse LU decomposition of the matrix A. Note:
If only the solution is needed, considerable time (and memory) may
be saved by just having the function return the solution x rather than
returning L, U , and x.
3.7 sparse mult
Syntax:
[x] = sparse mult(m1, m2) ;
Inputs:
m1, m2
The sparse matrices to multiply.
Outputs:
x
The resulting sparse matrix.
Description: Performs the multiplication of two sparse matrices, returing a sparse
matrix. Note that function currently uses a very slow algorithm.
3.8 sparse mult vec
Syntax:
[x] = sparse mult vec(m1, v) ;
Inputs:
m1
Sparse matrix.
v
Full vector.
x
Resulting full vector which is v = m1 x.
Outputs:
77
Description: Multiplies a sparse matrix by a full vector. Performance is reasonably
fast.
3.9 sparse tran
Syntax:
[x] = sparse tran(y) ;
Inputs:
y
Sparse matrix to transpose.
Outputs:
x
Transposed matrix.
Description: Performs a transpose of a sparse matrix.