GPS receiver modules ease overall system design
advertisement

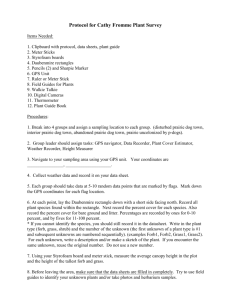
GPS receiver modules ease overall system design Max Bucher Product Manager, Embedded systems µ-blox ag The focus in this presentation is on the advantages of the use of GPS receiver modules for the design of new and innovative products. Very short design cycles, increasing cost pressure and the use of many different base technologies are the main challenges for the system integrator. Modular solutions enable designers and system integrators to meet the window of opportunity while enhancing the functionality of their systems. A few sample applications are discussed. 1 Introduction The rapid development of mobile communication and the upcoming new networks (GPRS, UMTS) that allow mobile data communication at data rates up to the speed of land based networks. The increasing bandwidth and higher processing power of mobile devices enable new applications that need more functionality of the device. This paper shall show that modular solutions help to meet the more and more stringent time frames for the development of very complex systems. Common conception is that modules are very well fitted for systems with moderate complexity and no too stringent space and power requirements. Very often the pricing of modules is not considered to be competitive with a chipset solution. In the following we would like to show, that miniaturized modules can be a very cost-effective and good solution for a system integrator. 2 Markets and Applications The on-going conversion of communication and mobile computing creates new products and services. This opens great opportunities as well for service providers, system integrators and network providers. Companies from different markets like mobile communication or mobile computation are expanding their product portfolio to enter these markets. Meeting the timeframe to enter these markets is crucial. The design of portable devices such as smart phones, PDAs and Handheld computers needs a very strongly integrated system with very low power consumption and small size. These products also combine very different functionalities and thus require various design competencies. The system integrator needs to have a very deep insight in RF design, high-speed digital design as well as software engineering for embedded 492 International IC – China • Conference Proceedings systems and user interface. Moreover the overall complexity of these systems will increase in the very near future. The still increasing need for miniaturization and low power consumption introduces even bigger challenges. Make or buy One of the questions a system integrator is faced with is: is it more cost effective to implement all the functional block (subsystems) himself, or would it be more efficient to buy modular solutions for some sub-systems. 3 Miniature Flight recorder - an Application Examples The Project One of the most fascinating topics in bird research is the navigation capabilities of birds, especially homing pigeon. Ornithologists all over the world are trying to figure out how these birds navigate and what sense of orientation enables them to find their way home from places as far as 200 miles away. You might think: “Why should we bother? What does this have to do with ITS systems? We basically want to know where our trucks are!” At first sight behavioral studies of birds might not have too much in common with fleet management and traffic technology. But the technical challenges implementing a miniature flight recorder are very well suited to demonstrate the advantages of the integration of a complete system on a GPS receiver module. Size and weight restrictions require an extraordinary high level of integration, which results in reduced external component count. A welcome side effect is a considerable reduction of the total system cost. A GPS receiver basically consists of a RF front-end, a correlator ASIC and a small processor system with SRAM and FLASH (see Figure 1). The solution of the equations to calculate the position in real-time requires a powerful processor. Therefore the processor will be idle most of the time, if the position information is not required at the highest frequency possible. A cost-effective system design will take account of this and uses the free resources, in order to minimize external component count while maintaining or even enhancing system functionality. Picture 2: Pigeon with flight recorder mounted Figure 1: Blockschematic of the GPS receiver Miniature Flight recorder Prof. Dr. Lipp, head of the research group for Neuroanatomy and Behavior at the University of Zurich brought up the idea of a miniature GPS flight recorder. His research group is internationally known for their behavioral studies on homing pigeons. They were looking for a device to get a new edge on their research regarding the orientation and navigational skills of homing pigeons. Until now there where only simple flight recorders, which were based on a compass. These could only record the headings during the flight. With a GPS receiver much more detailed data could be collected. Through the analysis of this data they hoped to get better insight on the behavioral patterns and cognitive skills of pigeons. In a joint project of the Institute for Anatomy of the University of Zurich and the Electronics Lab of the ETH Zurich a flight recorder for homing pigeons was developped. The idea was to attach a small box to the back of the bird that captures and records position, altitude and time. Once the bird has returned home the recorded data is transferred to a PC for analysis. Basically the flight recorder would consist of a power supply (battery or accumulator), GPS receiver, GPS antenna and a datalogger (Picture 1). This is an example of a minimal system with harsh size and power consumption constraints. Using a standard ‘off-the-shelf’ GPS receiver module with a special software extension (integrated datalogger) allowed to realize a highly integrated system within very short time. With its weight of 8g and the measurements of 30mm x 30mm the GPS-MS1E-DL from µ-blox was the ideal candidate for this application. Power consumption was a major concern, as in most mobile applications. The GPS-MS1E-DL supports a power save mode. In this power save mode the receiver acquires a position, stores it to the FLASH and automatically shuts down. This process takes about 1 sec. During the rest of the period the system remains in stand-by at a power consumption of 500µA. Using a position up-date period of 5s the GPSMS1E would operate up to 8h on a CR3 battery. This battery type proved to be the one with the best capacity/weight ratio. To reach the highest integration possible for the antenna a ceramic patch antenna with a ground plane directly on the PCB was used. The whole receiver is packaged into an ultra-light composite housing. The battery, the GPS receiver and the ceramic patch antenna contributes the most to the weight of the total system. The weight of the complete system including battery, antenna and housing is currently 36g (see table). Table 1: Weight budget Picture 1: Picture of flight recorder A pigeon is capable of carrying about 40g of weight for several hours, which is what they usually carry as food during a flight. Therefore the total weight of the system was not to exceed 40g. The size is determined by the size of the back of a pigeon. A module of 40mm x 60 mm would fit on the bird’s back. (Picture 2) Due to these mechanical constraints the highest possible level of integration was mandatory. The data logger The GPS-MS1E-DL contains 1024kBytes FLASH memory of which 700kBytes are available for custom use. These free resources can be used to implement a datalogger directly on the GPS receiver. This internal datalogger can write position information, altitude, velocity, time and number of satellites used for navigation to the on-board FLASH. After a flight the recorded data is downloaded to a PC through a serial interface. There the data is visualized and analyzed. The size of a regular data record is 9 x 16bit words. The datalogger is configured through the serial interface. A configuration software lets you set the logging interval as well as filter parameters define International IC – China • Conference Proceedings 493 whether a position fix should be stored to the FLASH or not. This filter minimizes the number of stored positions, while maintaining enough information to reconstruct a trace. The filter checks the minimum distance between two logs before storing a data record. This prevents the receiver to fill the FLASH, if the tracked object is moving very slowly or even standing still. A data compression algorithm further increases the number of data records that can be stored in the FLASH. Data is compressed by only storing the difference to the last position. Using all these features the datalogger is able to store up to 100’000 data records. Furthermore the datalogger offers the possibility to store the states of the (12) digital IOs together with a time tag. This allows the storage time and position of external events like starting an engine or pushing a panic button. It flies... For the first test flights the pigeons were trained with dummy units of the same size and weight as the flight recorder. After that training period the birds did not seem to take any notice of the additional weight anymore and first flights of 2-5km (see Picture 3) showed very encouraging results. For the first time ever recording the flight of birds over long distances (>100km) were made possible. Picture 3: Recorded path 494 International IC – China • Conference Proceedings Author’s contact details Max Bucher µ-blox ag Z¸rcherstrasse 68 CH-8800 Thalwil, Switzerland Phone: (41-1) 722 74 63 Fax: (41-1) 722 74 47 E-mail: max@u-blox.ch Web site: www.u-blox.ch