Identification and positioning of underground utilities using
advertisement

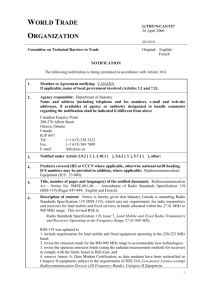
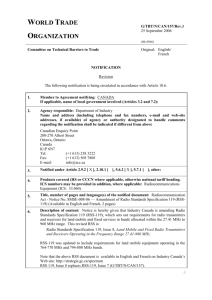
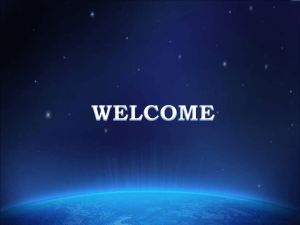
141 Sustain. Environ. Res., 23(2), 141-152 (2013) Identification and positioning of underground utilities using ground penetrating radar (GPR) Nga-Fong Cheng,* Hong-Wai Conrad Tang and Ching-To Chan Department of Land Surveying and Geo-informatics The Hong Kong Polytechnic University Hunghom Kowloon, Hong Kong Key Words: Ground penetrating radar, utilities, as-built positions, accuracy ABSTRACT Ground penetrating radar is one of the non-destructive methods useful in locating underground facilities. Little researches had been investigated about the significances of measuring pipes and cables in Hong Kong. In this research, general procedures on how to design the grids and to conduct the radar surveys were reviewed. The main objective was to compare the radar results with the conventional survey methods in three trial sites. Finally, it was crucial to evaluate the use of antenna frequency and the accuracy of the obtained data. . INTRODUCTION Utility surveying, according to the Survey Association [1], refers to the location, positioning and identification of buried pipes, cables and ducts irrespective of their sizes, depths, material types and proximity to other utilities using numerous techniques or technologies, so as to effectively facilitate planning, design and excavation of work. Ground penetrating radar (GPR, also known as ground probing radar, or georadar), one of the non-destructive methods gaining importance nowadays, is useful in locating underground pipes and cables. Several researches had been done to detect the existence and the depth of the underneath objects [2-4], yet little pointed out the significances of getting the positions of underneath utilities. Everyone may not aware there are 7.1 x 104 km of underneath utility systems installed around 1,900 km of roads in Hong Kong, mostly in pavements, cycle tracks or amenity strips [5]. Such subsurface facilities are progressively becoming one of the important components of cosmopolitan infrastructure for engineering, environmental and geotechnical purposes in this congested city. Many incidents on damaging buried utilities such as the Kwun Lung Lau event in July 1994 and the Shenzhen gas leakage event in June 2005 had been reported [6]. To avoid the above accidents, there is an urgent need for surveyors to accurately measure their respective positions. In addition to that, few investigations related to the shape and size of utilities had been mentioned in *Corresponding author Email: chengnfalice@yahoo.com.hk . Tong's studies [4], but not in Hong Kong. This paper aimed to compare the radar survey results under certain circumstances types of utilities, site conditions, and frequency antenna. To start with, some introductions about the GPR and existing utilities in Hong Kong were briefly discussed. General procedures on how to design the grids and to carry out the surveys were then examined in this study. As extracted both as-built utilities as well as ground existing features from engineering drawings supplied by the Civil Engineering and Development Department (CEDD) of the Hong Kong Government, the following parameters like shapes, sizes together with positions can be easily defined in post-processed radargrams, and the comparisons between the measurements and as-built positions of the utilities can be made. Finally, it is also crucial to evaluate the use of antenna frequency and the accuracy of the obtained data. . OVERVIEW OF GPR The definition of GPR is “a range of electromagnetic techniques designed primarily for the location of objects or interfaces buried beneath the earth's surface or located within a visually opaque structure” [7]. It is one of the geophysical techniques with electromagnetic waves to identify underlying structures, in particular plastic pipes or fiber cables. Its history can be traced back to the 1920s when the GPR was used to 142 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) determine the ice thickness in Germany [8]. Thereafter, the radar has been nearly forgotten. Not until 1950s researchers once again continued to conduct the ice research and people started to develop it for other applications, e.g., soil and rock analysis [9,10]. The first GPR system, designed and built by the National Aeronautics and Space Administration was solely served for the moon landing mission in 1967 [11]. In 1994, the data analyzing software was initially built in Japan [11]. In the last few decades, it was recognized by others [12,13] that GPR is applicable for various disciplines such as archaeological survey, geology, hydrogeology, utility detection, sand dune study, sedimentology, landmine clearing and so on. . ASTM [14] briefly gives a summary of the GPR. Its components include a control unit, an antenna (transmitter and receiver) and survey wheel(s) if necessary (See Fig. 1). The control unit synchronizes the antenna to generate radar waves and to receive reflected signals. The resultant signals can be shown either black and white, different colour transform, filtered or amplified on the display. The antenna transmits and receives radio frequencies, covered with shielding and placed close to the ground surface. Survey wheel(s) attaching to the antenna in contact with the bark surface count(s) electromagnetic pulses across a given distance, in order to calibrate a uniform wheel speed. These waveforms are further stacked to . create two dimensional reflection profiles. The characteristics of GPR lies on the Maxwell's equation, two-way travel time and the electric and magnetic properties of the materials itself. The first equation describes the nature of electromagnetic wave; the second one relates constant velocity of the medium to the reflector; and the last one emphasizes the dielecDisplay Record Air Timing Transmitter Antenna Receiver Antenna Soil Bedrock Fig. 1. Components of GPR [13]. tric constant (also called relative permittivity) [11]. These have been discussed in many times, which are both mathematically expressed in Eqs. 1 to 3. The higher the dielectric constant (K), the lower the electromagnetic waves passing through the materials. Table 1 identifies the electromagnetic characteristics of different earth materials using GPR. The constant value varies from 1 for air (the fastest propagation without any energy loss) to 81 for fresh water (the slowest). . Ä (1) E=- Ä where is the curl operator, E is the electric field strength vector (V m-1), B is the magnetic flux density vector (T), and t is time (s). . D= tV 2 (2) where V is the velocity of the material through which the radar passes (m ns-1), D is the one way distance to the object, and t is the two-way travel time to the object. . (3) K= 0 where 0 is the permittivity of vacuum (8.89 x 10-2 F m-1), and is the permittivity of the target. . Table 1. Electromagnetic properties of various subsurface materials [14] Material Dielectric constant (K) Air 1 Fresh water 81 Sea water 70 Sand (dry) 4-6 Sand (saturated) 25 Silt (saturated) 10 Clay (saturated) 8-12 Dry sandy coastal land 10 Fresh water ice 4 Permafrost 4-8 Granite 5 Limestone 7-9 Dolomite 6-8 Quartz 4 Coal 4-5 Concrete 5-10 Asphalt 3-5 Sea ice 4-12 PVC, epoxy, polyesters 3 143 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Various selectable frequency antennas can be chosen to best fit with the project requirements, ranging from 10 MHz to 1.6 GHz. To determine the appropriate centre frequency, Eq. 4 identifies certain parameters (i.e., their depth ranges, dimensions and electrical properties), which gives a negative relationship between the desired vertical resolution and the frequency [15]. To design a suitable survey grid, another important criterion is to determine size of footprint (i.e., survey interval, A). Keeping K such as chemical constituents, differences in retained moisture, compaction and porosity throughout the radar medium, the following approximate parameters such as angle of the transmission cone, central frequency of the antenna and its target depth are indicated in Eq. 5 and shown in Fig. 2. To give a good spatial resolution in the survey area, Eq. 6 is used for a limited range of depth (D) and velocity (V) in the display window (W). As referred to Table 2, high frequency waves can be illustrated in narrower widths along with tighter spots. As a general rule, the deeper the penetration, the lower the antenna frequency, the lesser the resolution and vice versa. Also, higher resolution is necessary for smaller features. . ë= 150 MHz W K (4) where ë refers the centre frequency of the antenna (MHz) and W is the desired vertical resolution (m), . A= D ë + m 4 K+1 (5) where A refers the survey spacing of the grid (m). W = 1.3 (2D V ) ns (6) THE HONG KONG UTILITY SYSTEM The underground utilities can be classified into 5 main categories - water, gas, drainage, power and . telecommunication cables. The Water Supplies Department is in charge of the Antenna Ground Surface D A Footprint Fig. 2. Illustration of the size of footprint of radar energy [11]. supply of water. Several types of pipe materials with standardized sizes are located in certain depths between 1 and 2 m (Table 3). Unplasticized polyvinyl chloride (uPVC) less than 100 mm diameter is applied to the salt water mains, lying in pavements with relatively shallow cover. Asbestos cement has been discontinued for many years but many still exist in the water mains. It varies from 100 to 450 mm in diameter, which is internally durable but relatively . brittle when applying excessive external pressure. The Hong Kong and China Gas Company Limited is responsible for the classes of gas supply, ranging from 2 kPa (low) to over 700 kPa (high) pressure. Ductile iron is connected by mechanical flexible joint system applied in both water and gas systems since 1970s, with a diameter ranging from 80 to 1600 mm. Its material standard is based on BS4772/EN969. Unlined galvanized iron (GIU) and Lined galvanized iron (GIL) are, less than 150 mm in diameter linking with screw joints, used in the above two systems. Locating them is relatively simpler than the other kinds because of strong and obvious reflection signals. GIL pipes, governing the standard under BS1387, have been adopted for the replacement of GIU since 1995. Polyethylene has widely used since 1998 to phase out GIU, GIL and uPVC pipes. Its diameter is less than 400 mm, connecting to butt fusion, electrofusion and transition fittings by heat melting. Its material Table 2. Examples of capability of frequency [14] Frequency Typical applications Maximum depth (m) 1.6 GHz Structural concrete, roadways, bridge decks 0.5 900 MHz Concrete, shallow soils, archaeology 1 400 MHz Shallow geology, utility, environmental, archaeology 3 200 MHz Geology, environmental 8 100 MHz Geology, environmental 20 144 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Table 3. Summary of respective depths of Hong Kong utilities [5] Types of utilities Examples Standard burial depth (m) Power cables Street lightings in sidewalk and cycle track, Area traffic control 0.35 Low voltage in sidewalk and cycle track 0.45-0.90 High voltage in carriageway 1-2 Water mains Drinking, flushing, watering pipelines 1-2 Drain mains Storm and foul sewerage ducts 1.5-5 Gas mains Towngas, other tubed gases 1-2 Telecommunication lines Telephone lines, broadband, cable TV, military communication lines 0.5 standards are GBE/PL2, EN1555 and GB15558. The advantages are corrosion free and strong resistance from stress. . The Drainage Services Department is responsible for flood prevention and wastewater treatment (i.e., stormwater drainage and sewerage building). Concrete and vitrified clay are two major types of drain materials used today. Its pipes are placed much deeper than other utilities, from 1.5 to 5 m. . The China Light and Power Company Limited and the Hong Kong Electric Company Limited are the sole service providers in the entire territory of Hong Kong. The outer layers of cables, almost buried underground, are appeared in green, red and black colours. Depending on the locations, the voltages (low or high voltage) and its usage (transmission or distribution purpose), the standard depths lay from 0.35 to 2 m. On the subject of power and telecommunication cables, PVC outersheath is appeared to those enclosed by different colour sheaths at outer diameters from 16 to . 95 mm buried beneath. THREE TESTING SITES To work with the above objectives, three locations in Hong Kong were chosen to compare results between as-built surveys and GPR surveys among different utilities and materials in pavements. They were: . 1. Drains along Kong Sin Wan Road, Cyberport (Sites 1A and 1B, KSWR); . 2. Watermains at Nam Fung Path, Aberdeen (Site 2, NFP); and . 3. Electricity cables at Hong Tat Path, Tsim Sha Tsui . East (Site 3, HTP). All are paved in flat surface without any irregularities. Site 1 was built for the purpose of accessing facilities nearby in 2009. The drains were covered by 300 mm Type B compacted materials with 50 mm brick on the top. These earthworks materials do not exceed 75 mm maximum particle size at around 3% moisture content, which complies with the requirements of Guidance notes No. 014B issued by the Highways Department [16]. Similarly, Site 2 was formed for the purpose of road facilities in 2008. Field inspection revealed that the study area was close to the construction site of the Mass Transit Railway south island line. With regard to Site 3, it contained a brunch of cables lying under pavements. It seemed to be difficult in detecting several packed targets together accurately. In situations some of survey lines had been missed or not perfectly aligned where a complete scan was obstructed by a tree or man-made ground . features. It was also necessary to consider the following parameters, such as ë, K, grid spacing and calibration of survey wheel. Equipment available in the study was the hand-pulled SIR-20 GPR unit with three groundcoupled centre frequency antennas - 100, 270 and 400 MHz (GSSI, USA). However, the use of 100 MHz antenna was abandoned because of lack of precise horizontal distance measurement without the usage of survey wheel. To ensure transect lines easily and to maintain a complete coverage of the targets, the grid intervals designed for two different ë (270 and 400 MHz) in the vicinities were laid between 0.68 and 1 m (Eqs. 4 and 5). As such, survey transects were spaced 1 m for Sites 1 and 2, and 0.5 m for Site 3 apart. General survey information relevant to these sites is described in Table 4 and Figs. 3 to 5. Besides, record plans were requested by several utility undertakers to . fully understand the underneath site conditions. Each plot was surveyed in two directions, but only the longitudinal transects were used subsequently for analysis because it was more difficult to distinguish the reflectors along short horizontal profiles. Simply, one or two reflectors could be possibly collected in every two or three-metre horizontal profile (Fig. 6a), whereas plenty of reflectors along the longitudinal profiles could be identified as sample points (Fig. 6b).. Prior to any start of every GPR survey, it is necessary to do the calibration which is divided into two elements - survey wheel calibration and common midpoint method. The former one is to correct the horizontal scales on a measured baseline with respect to the survey wheel in Fig. 7a. Without considering any speed, the wheel has a distance encoder by count- 145 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Table 4. Survey details of three sites Site Grid dimension Total number of transects (Horizontal & Longitudinal) Types of utilities Burial depths (m) 1. KSWR (A) 19 x 1 m, 1 m spacing 22 (20 + 2) 300 mm diameter concrete drains 1.93-1.96 KSWR (B) 24 x 3 m, 1 m spacing 29 (25 + 4) 225 mm diameter concrete drains 1.89-1.93 2. NFP 19 x 2 m, 1 m spacing 23 (20 + 3) 150 mm diameter water mains 0.49-0.64 3. HTP 26 x 2 m, 0.5 m spacing 58 (53 + 5) 25-58 mm diameter power cable 0.45 Fig. 4. NFP watermain site. Fig. 3. KSWR drainage site 1A (a) and 1B (b). ing the number of ticks per metre (Preset is 407 ticks per metre). The survey wheel distance error does not exceed ± 2% (Fig. 7b) under certain favourable conditions (e.g., smooth ground, proper procedures, no slippage, etc.) [17], which is in agreement with the findings from various sites. On the other hand, the latter one is to determine the radar wave velocity as well as K for each site. Using the above formula mentioned above, the signal-to-noise ratio together with the velocity could be analyzed by measuring . several known target depths. As mentioned before, the underneath site conditions existed almost in concrete and compacted materials. Therefore, K were set all 8 among four sites as referred to Table 1 (K between 5 and 10). Table 5 illustrates the relationship between the calculated figures of K in various locations and their differences. The values of velocities, which were deduced from the depths and times of different utility points collected and presented in the primitive radar profiles among three sites, were calculated by Eq. 2. The results of the calculated K (Kcalculated) were determined using Eq. 7. For instance, K is 2.25 while both velocities of utility points and light are 0.2 and 0.3 m ns-1 respectively. As stated beforehand, the reliable positions of the utilities in these sites were surveyed and fixed during the construction stage (Table 4). By comparison, the results of the calculated figures were found steady and consistent in different material complexities, ranging from 6.35 to 9.96. Hence, the antennas were successfully calibrated on site with adoption of K of 8. Radar profiles were collected in 50 ns vertical range of display window. . 146 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) V= C K (7) where c denotes as the velocity of light (0.3 m ns-1). . The presence of available surface features and utilities was firstly identified. The reliable positions of the utilities in Sites 1 and 2 were then extracted from as-built CEDD engineering drawings. Also, the cable depths in Site 3 had just been estimated by tie measurements during excavation. At the same time, individual radar profiles were examined for indicating parabolic reflector signals of utilities. The positions of these sample points were marked as in m either threedimension or one-dimension coordinates in HK1980 local coordinate system. To estimate the positional accuracy of the GPR, the root mean square error (RMSE) is a statistical measure which was used to examine the difference between GPR results and the as-built results, i.e., the magnitude between two results. . RESULTS AND DISCUSSION (a) (b) Fig. 7. (a) Survey wheel calibration, and 7 (b) Number of ticks per unit for distance estimation [17]. Fig. 5. HTP electricity cable site. (a) (b) Fig. 6. Comparison of a horizontal profile (a) and a longitudinal transect (b). 147 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Table 5. Dielectric constant analysis (the calculation results are corrected to 1 decimal place) Venue NFP HTP KSWR Site 1A KSWR Site 1B 400 MHz 270 MHz 400 MHz 270 MHz 400 MHz 270 MHz 400 MHz 270 MHz Centre freq. Min. Max. Min. Max. Min. Max. Min. Max. Min. Max. Min. Max. Min. Max. Min. Max. V (m ns-1) 0.12 0.10 0.12 0.10 0.12 0.10 0.12 0.10 0.11 0.10 0.11 0.10 0.11 0.10 0.11 0.10 Kcalculated 6.8 9.5 6.4 10.0 6.6 9.4 6.4 9.9 7.7 8.3 7.6 8.3 7.5 8.3 7.3 8.6 Kadopted 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 8.0 K diff. -1.2 1.5 -1.6 2.0 -1.4 1.4 -1.6 1.9 -0.3 0.3 -0.4 0.3 -0.5 0.3 -0.7 0.6 Fig. 8. Time zero correction in Site 2 using 270 MHz antenna (The vertical line indicates 1.61 ns as the first peak displayed in horizontal axis and the vertical axis is the displacement in m). Table 6. Time zero correction of 3 sites with 2 antenna frequencies Frequency/Site Site 1A, KSWR (ns) Site 1B, KSWR (ns) Site 2, NFP (ns) Site 3, HTP (ns) 270 MHz 1.61 0.88 1.61 1.61 400 MHz 0.29 0.49 0.78 0.39 With the use of application software Radan Version 6.5.3.0, further processing techniques were performed to improve the clarity of reflector signals, such as time-zero correction, infinite impulse response (IIR) filtering, finite impulse response (FIR) filtering, deconvolution, migration, and so on. To illustrate some examples, time-zero correction is to determine the antenna-ground separation and to correct the initial depth of the ground interface in terms of ns (Fig. 8), which is usually set as the first peak wave when the electromagnetic wave hits the ground [8]. The correction of 3 sites in ns was described in Table 6, from which a larger gap had been found in 270 MHz result. . In addition to eliminate the human interference or the system noise for the enhancement of radargram interpretation, either IIR or FIR method or both can be effectively used in the filtering process. The IIR method is that the filters decay the signal exponentially towards zero when coming across a feature, in order to reduce the background noises in the whole picture. As shown in Fig. 9, users can define the low and/or the high frequency from 75 to 700 MHz, horizontally and/or vertically together with the time interval in the IIR filter parameters box [17]. Figures 10 and 11 are the examples indicating the changes in different filter applications and their effects. For instance, the unwanted low frequency features appeared in “snowlike” noise in Fig. 10 could be eliminated using the vertical high pass 500 MHz filter. Similarly, the high frequency signals in Fig. 11 could be excluded using . vertical low pass 200 MHz filter. On the other hand, the FIR filters contain vertical and horizontal filters as well as spatial 2D filters. These filters have resulted in symmetrical nature and linear phase characteristics to remove some restricted features which would not be shifted in time or position [17]. Two other kinds of calculation including boxcar averaging filter and triangle weighting filter are available in the software. A simple running average with equal weight is the prime process of boxcar filter 148 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Fig. 9. IIR filtering (the horizontal axis indicates the radar signal in ns and the vertical axis is the displacement in m) [17]. Fig. 10. A vertical IIR high pass 500 MHz filter (band-pass) in Site 2 - 400 MHz antenna in transect 22. Upper half of spilt screen is original raw data. Lower half is processed data. Fig. 11. A vertical IIR low pass 200 MHz filter (band-pass) in Site 2 - 400 MHz antenna in transect 22. Upper half of split-screen is original raw data. Lower half is processed data. 149 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) applied to the data along all profiles. By contrast, the triangular filter is a weighted moving average like a triangular shape which highly focuses the centre of the filter rather than the end of the filter [17]. For the above filters, some repetitive trials are essentially performed to check whether the target(s) is (are) undoubtedly reflected to the profiles. For most of our study sites, it was found that the filtering processes were employed between 100 and 500 MHz to all samples, which is subject to certain conditions such as the level of moisture content, soil composition and material complexities, and so on. The interpretation of radar profiles is also operator subjective. . Another example is the deconvolution. Both Sites 1 and 2 were surveyed on top of metal surface (e.g., manhole cover, u-channel cover) and resulted in ringing waves' effect (Fig. 12). Since GPR is pulling onto the surface, the multiple reflections are then resolved using pre-whitening step. This step mathematically alters the autocorrelation function by boosting the white noise (zero delay) component, and also stabilizes the filter by smoothing the output and reducing noise as illustrated in Figs. 13 and 14. Values between 0.1 and 5% are the good start [17]. Gain value is finally adjusted to increase the visual contrast of the . target wavelets [17]. We were able to detect these three kinds of utilities and to identify them in the radargrams. Other than that, three extra observations were pointed out in the study. The first one is to identify the thickness of Type B surface compacted material (300 mm) in Site 1A. A clear layer on the top as shown in Fig. 15 was quite consistent with that in the record plan. Also, two nearly parallel lines (Fig. 16) between 0.7 and 0.83 m indicated that there was a strong reflection of 150 mm outer diameter watermains in Site 2, which agreed with the result shown in the engineering drawing. At the same time, more than 300 GPR sample points had been taken into account of the comparison of the as. built surveys as seen below. Serving the as-built data as the reference sample to assess the accuracy of two dimension locations and depth values, both RMSE and standard error (ó) were adopted for the comparison of the GPR results, as given by Eqs. 8 and 9. The RMSE is defined as the root of the sum of squares of 2D position residuals while the ó is the root of the sum of squares of depth . residuals. (8) (9) Fig. 12. Deconvolution in Site 2 - 270 MHz antenna in transect No. 2 (left: its outlook; middle: before deconvolution; right: after deconvolution). where ÄN is the northing difference between the asbuilt value and GPR value, ÄE is the easting difference between the as-built value and GPR value, Fig. 13. The pre-whitening step 0.1%. Upper half of split-screen is original raw data. Lower half is processed data. 150 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Fig. 14. The pre-whitening step 5%. Upper half of split-screen is original raw data. Lower half is processed data. penetration with the lower ë”, it was shown that the 270 MHz measurement was much better than the 400 MHz one in detecting utilities 2-m below (i.e., Sites 1A and 1B). On the contrary, the 400 MHz one was good at distinguishing underlying objects less than 2-m (i.e., Sites 2 and 3). For instance, Figs. 17 and 18 indicate both RMSE and ó in Site 2. By comparison, the 270 MHz antenna data had better results in terms of RMSE and ó. . CONCLUSIONS Fig. 15. Type B compacted material in KSWR Site 1A using 400 MHz antenna. Fig. 16. Watermains in NFP Site using 400 MHz antenna (transect no. 22). ÄZ is the depth difference between the as-built value and GPR value, and n refers to number of sample . points. As referred to Table 7, Site 2 gave a model example in determining the positional accuracy of GPR. Generally speaking, the outcome proved the capability of nondestructive GPR techniques to obtain the reliable utility positions average to dm level, some better to cm level dependent on favourable site conditions. By applying the preceding rule of thumb “the deeper The objective of the research was to evaluate the positions of several types of underneath utilities using the non-destructive radar results. The as-built measurements extracted from the engineering drawings surveyed by conventional land surveying methods during site formation stage were treated as reliable references to make comparison with the radar results. To begin with, GPR and its characteristics were briefly reviewed and the five main types of utility system in Hong Kong were summarized. Also, general survey considerations were made such as choice of ë, K, grid spacing and calibration of survey wheel. The study found that both 270 and 400 MHz antennas were calibrated well on site with adoption of K of 8. Several GPR surveys had been successfully carried out in these three pedestrian trial sites - Site A and Site B of Kong Sin Wan Road, Nam Fung Path and Hong Tat Path. They are repre. senting three different kinds of utilities. Post-processing techniques including time-zero correction, IIR and FIR filters, and deconvolution were performed to enhance the interpretability of original radar signals. The identifications of shape and size of available surface and subsurface features (i.e., manhole cover, u-channel cover and Type B compacted material) and subterranean utilities (i.e., Drains, 151 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) Table 7. Positional accuracy of the study areas Site/RMS and ó 270 MHz RMS (m) 400 MHz RMS (m) 270 MHz ó (m) 400 MHz ó (m) 1A, KSWR 0.136 0.623 0.116 1.441 1B, KSWR 0.093 0.185 0.203 0.861 2, NFP 0.028 0.197 0.165 0.035 3, HTP Inapplicable Inapplicable 0.150 0.110 2D positions in Site 2, Nam Fung Path 812533 As-built watermain positions 400 MHz GPR result 270 MHz GPR result 812531 812529 Northing (m) 812527 812525 812523 812521 812519 812517 812515 836330 836332 836334 836336 836338 Easting (m) Fig. 17. Correlation between the positions of 270, 400 MHz and the target watermains in Site 2, Nam Fung Path. Depths in Site 2, Nam Fung Path Radargram 1 3 5 7 9 11 13 15 17 19 0.9 0.8 Depth (m) 0.7 0.6 0.5 0.4 0.3 0.2 As-built depth 270 MHz GPR depth 400 MHz GPR depth Fig. 18. Correlation between the depths of 270, 400 MHz and the target watermains in Site 2, Nam Fung Path. 152 Cheng et al., Sustain. Environ. Res., 23(2), 141-152 (2013) watermains and electric cables) were identified among these processed radargrams. To estimate the positional accuracy of the GPR, RMS of as-built data and GPR data were then examined. The study revealed that there was a strong correlation in the RMSE and ó in Site 2 (Nam Fung Path site), especially for 270 MHz result. In other words, the site was proved the capability of GPR to obtain the reliable utility positions average to decimetre level, some better to centimetre level. It was also achieved that the 400 MHz antenna was good at distinguishing underlying objects less than 2-m, whereas 270 MHz one was 2-m below. However, these were the straight forward cases and still have room for improvement. Some special attentions are crucial for the surveyors in conducting GPR surveys, for example, weather conditions, irregular or rough topography, heavy vegetation, and grid clearance for attaching . survey wheel to the antenna respectively. ACKNOWLEDGEMENTS The heartfelt thanks to the survey division of the CEDD and other utility undertakers were highly appreciated by supplying as-built engineering drawings and utility record plans correspondingly. Special thanks also go to the two anonymous referees who provided very useful comments on an earlier version of the manuscript. . REFERENCES 1. TSA, Guidance Note Utility Surveys - Detailed Guidance Notes for Specifying a Utility Survey. The Survey Association, Nottinghamshire, UK . (2010). 2. Annan, A.P. and S.W. Cosway, Ground penetration radar survey design. 53rd Annual Meeting of European Association of Exploration Geo. physicists. Florence, Italy, May 26-30 (1991). 3. Bristow, C.S. and H.M. Jol, Ground Penetrating Radar in Sediments. Geological Society, London, . UK (2003). 4. Tong, L.T., Application of ground penetrating radar to located underground pipes. Terr. Atm. . Ocean Sci., 4(2), 171-178 (1993). 5. Wong, K., Utility Systems Part 1. Lecture 6 of Utility Systems and Design (LSGI 3352). Department of Land Surveying and Geo-informatics, the Hong Kong Polytechnic University, Hunghom, . Kowloon (2010). 6. Wong, K., Utility Systems Part 2. Lecture 6 of Utility Systems and Design (LSGI 3352). Department of Land Surveying and Geoinformatics, the Hong Kong Polytechnic . University, Hunghom, Kowloon (2010). 7. Daniels, D.J., Ground Penetrating Radar. 2nd Ed., Institution of Engineering and Technology, . Stevenage, UK (2004). 8. Wojciech, L., GPR History and Introduction. Lecture 4 of Utility Surveying (LSGI 3353). Department of Land Surveying and Geo-informatics, the Hong Kong Polytechnic University, . Hunghom, Kowloon (2010). El-Said, M.A.H., Geophysical prospection of 9. underground water in the desert by means of electromagnetic interference fringes. Proceedings . Inst. Radio Eng., 44(1), 24-30 (1956). 10. Waite, A.H. and S.J. Schmidt, Gross errors in height indication from pulsed radar altimeters operating over thick ice or snow. Proceedings Inst. . Radio Eng., 50(6), 1515-1520 (1962). 11. Conyers, L.B., Ground Penetrating Radar for Archaeology. Altamira Press, Oxford, New York . (2004). D., Ground-penetrating radar 12. Goodman, simulation in engineering and archaeology. . Geophysics, 59(2), 224-232 (1994). 13. Jol, H.M., Ground Penetrating Radar Theory and Applications. Elsevier, Oxford, UK (2009). . 14. ASTM, Standard Guide for Using the Surface Ground Penetrating Radar Method for Subsurface Investigation. D18 on Soil and Rock. American Society for Testing and Materials, West . Conshohocken, PA (2005). 15. Sensors & Software, Ground Penetrating Radar, . Survey Design. Mississauga, Canada (1999). 16. HKHD, Permanent Trench Reinstatement. Hong Kong Highways Department, Kowloon, Hong . Kong (2010). 17. GSSI, User Manual of SIR System-3000. Geophysical Survey System Inc, Salem, NH . (2008). Discussions of this paper may appear in the discussion section of a future issue. All discussions should be submitted to the Editor-in-Chief within six months of publication. . Manuscript Received: July 19, 2012 Revision Received: November 5, 2012 and Accepted: December 10, 2012