Gyroscope Experiment: Lab Manual & Theory
advertisement

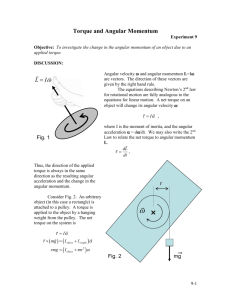
Page 1 of 6 THE GYROSCOPE The setup is not connected to a computer. You cannot get measured values directly from the computer or enter them into the lab PC. Make notes during the session to use them later for composing an electronic report. For a 1-weight experiment do Part 1. For a 2-weight experiment do Part 1 and Part 2 Recommended readings: 1. Physics for Scientists and Engineers by Serway and Jewett. V.1, 9th ed. Chapter 11.5, pp.350-352 2. The Feynman Lectures on Physics, Chapter 20 (this has a very nice, intuitive description of the operation of the gyroscope) Copy available at the Resource Centre. 3. Operation and Instruction Manual for the MITAC Gyroscope (available in a hard copy at the Resource Centre or online at https://wiki.brown.edu/confluence/download/attachments/28923/Gyroscope+Manual.pdf INTRODUCTION One of the most interesting areas in the science of rotational dynamics is the study of spinning solid objects, tops, hoops, wheels, etc. From the gyrocompass (which indicates true North, rather than Magnetic North) to an understanding of how a cyclist turns corners, the applications of this field of study are both practical and fascinating. This experiment is designed to introduce you to some of these interesting and often counterintuitive properties of rotating bodies. The apparatus consists of a 2.7 kg cylindrical rotor that is spun at a constant rate by an electric motor. The rotor is mounted in a double gimbal arrangement which allows it to assume any orientation. THEORY (a) Angular Motion. The basic equations for angular motion can often be obtained simply from those for linear motion by making the following substitutions: Linear variables Force, F Mass, m Velocity, v Momentum, p Acceleration, a Angular variables Torque, Moment of Inertia, I Angular velocity, Angular Momentum, L Angular acceleration, Page 2 of 6 NB. The analogy needs to be treated with caution; e.g. I is not a constant property of the body, as is mass, since its value depends the axis around which it is measured. dp d m v dL d I I Thus Newton’s Law, F m a , becomes dt dt dt dt So we see that a torque applied to a body rotating with angular momentum L produces a change in that angular momentum according to the relationship: dL dt (1) where is the applied torque, L I is the angular momentum, is the angular velocity of rotation of the body and I is the moment of inertia of the body about the axis of rotation (i.e., about the axis). If this torque is applied perpendicular to the direction of L (i.e., perpendicular to the direction of ) then from equation (1), L does not change in magnitude but does change in direction (if you do not understand why this is so, check with a demonstrator before going any further). This change in direction of L (and thus also of ) is called precession and appears as a rotation of the direction of the L vector in space with a precession angular velocity of p . Then it can be shown that p L (2) (b) Spring Constants. You will need to measure the spring constants, k, of the springs which are used in the measurement of the moments of inertia of the rotor. Consider a spring which is hanging vertically, with a mass m attached to its lower end. Suppose its extension under the action of the force mg is d. If it is now made to oscillate up and down it will acquire an additional extension or contraction . The net force on the mass due to this additional extension (positive or negative) will be given by F = ma = - k , where k is a constant called the spring constant, determined by the physical properties (rigidity, etc.) of the spring. The negative sign indicates that the force always acts in such a way as to reduce the size of the extension. But a, the acceleration of the mass can be written as d 2 , so, rearranging, we have : dt 2 d 2 k 2 m dt (3) This is the equation of Simple Harmonic Motion, which has sinusoidal or cosinusoidal solutions. It yields for the period of the oscillation: Page 3 of 6 T 2 2 m , or k T k m (4) (c) Moments of Inertia. In the situations shown in Figures 1, 2a, 2b and 3, the torque applied to the rotor-plus-gimbal is l F , by definition of torque. Here, F is the sum of the forces acting with arm l about the axis of rotation. These forces are provided by the two springs. As l F , the magnitude of torque can be rewritten as l | F | FIG.: 1 FIG.: 2a FIG.: 2b FIG.: 3 If k1 and k2 are the spring constants of the two springs, d1 and d2 the extensions from the unstressed length when the rotor is at rest, and the extension of one spring and the concomitant compression of the other as the rotor oscillates (vertically in Figures 2a and 2b, horizontally in Figure 3), we have, | F | [k1 (d1 ) k 2 (d 2 )] , which, if k1 k 2 k and d1 d 2 , becomes : 2k Now, , where is the angular displacement of the rotor-plus-gimbal. This angle d 2 undergoes an acceleration 2 , so that: dt I I d 2 2k 2k 2 2 dt (5) This is again the equation of Simple Harmonic Motion, similar to Equation (3) above. Analogously to (4) it has a solution for the angular frequency o f oscillation of: 2k 2 I (6) Page 4 of 6 EXPERIMENT Study the gyroscope and ensure that you can identify the outer frame, the outer gimbal (which has a vertical rotation axis), the inner gimbal (with horizontal rotation axis), and the caging screw which locks the outer gimbal to the frame, along with the associated equipment, the weights, the springs and their supports, and the scale. Part 1 Start by balancing the gyroscope. Lock the outer vertical gimbal to the frame. Start the motor and allow a minute or so for the rotor to attain a constant operating speed (NB - important!). Then adjust the weights on either the head or tail weight of the “arrow” by screwing them in or out until the spin axis stays horizontal. FIG.: 4 First measure the spin angular velocity of the rotor (in radians per second) and the moment of inertia of the rotor around the spin axis, I. The moment of inertia can be calculated from the dimensions of the rotor arm, considered as the difference between two solid cylinders. M2 M1 r1 r2 I1 M 1 r12 2 I2 M 2 r22 2 I I1 I 2 M i ri 2 t i t1 The result is : t2 1 I (r14t1 r24t 2 ) 2 , where the density of the material of the rotor 6.7 g cm-3; r1 is the outside radius of the rotor wheel : r2 is the inside radius of the rotor wheel; t1 is the outer thickness of the rotor wheel : t2 is the depth of the inner cylinder wall. The angular momentum of the rotor around the spin axis, L, can now be found analytically with values of I and . Page 5 of 6 Before taking more measurements, familiarize yourself with some of the properties of the gyroscope. Remove the caging screw so that the gyroscope has now two degrees of freedom (it can rotate in both a vertical and a horizontal plane). With the rotor running, notice what happens if you move the base by rotating it, lifting it, or otherwise moving the whole gyroscope. Then apply a torque to the gyroscope, by pushing gently on the spin arrow in any direction; observe the subsequent precession. Can you explain the direction of precession from a study of Equation (2)? Be sure that you understand the directions in space of the quantities in Equation (2). Now apply a very gentle vertical torque to the outer gimbal; notice that even if the outer gimbal does not rotate, you can still induce precession of the spin arrow. Explain why. Again lock the outer gimbal to the frame, and repeat the above experiments. Explain why the gyroscope now appears to have lost its inertial properties. You are now ready to check the validity of Equation (2) using the weights which clip on to the notches on the spin arrow to provide a horizontal torque (with two weights and two notches, it is possible to take up to six measurements - count them!). A plot of torque versus frequency of precession should yield a straight line passing through the origin does it? - and a value for L, the angular momentum of the rotor. How does this value of L agree with that found earlier? Part 2 Another interesting property of the free gyroscope is nutation, the oscillation of the spin arrow as it precesses. (See Feynman, in Recommended Readings for a good diagram and discussion). This may be observed by giving a downward tap to the head of the spin arrow as it precesses; a damped oscillatory motion will be observed. The angular frequency of the nutation depends on the inertial properties of the spinning rotor. If Ii is the moment of inertia of the inner gimbal-plus-rotor-plus-weight about its horizontal axis, and Io the moment of inertia of the outer gimbal-plus-rotor-plus-weight about its vertical axis, then it can be shown (see the MITAC booklet) the angular frequency of the nutation of the rotor is given by: L (7) n 2f n Ii Io Ii and Io can be measured by observing oscillations in the vertical and horizontal planes respectively of the gimbal-plus-rotor when two springs are attached to the system. Figures 2 - 4 show the setup. For both measurements, remove the weight, and SWITCH OFF the rotor; for the measurement of Ii, the outer gimbal should be locked to the frame. Values for ℓ used in the derivation of Equation (6) are ℓ = 8.25 cm for the inner gimbal, and ℓ = 14.0 cm for the outer. The spring constants can be found from the apparatus manual provided in the lab. (Question: how accurate is the assumption of k1 = k2 ?). We suggest that it is best to first measure the frequency of nutation by removing the weight, setting the rotor in motion (with the outer gimbal unlocked), displacing the arrow Page 6 of 6 head in the vertical direction, and then releasing it. Measure the frequency of the resultant motion and compare it to the result of Equation (7). Measure fn while the rotor is actually precessing. Unlock the rotor and clip on one of the weights to the spin arrow (to observe a change in fn it is a good idea to use the maximum torque available). In order to compare this result to Equation (7), both moments of inertia Ii and Io have to have a term added to them to take account of the extra contribution of the added mass. One limitation of the apparatus arises from friction in the bearings of the gimbals. This is particularly noticeable with a large weight hung on the rotor axis. If friction did not exist, the weight would not drop with time, but rather would just move in a horizontal plane due to precession. If the weight drops it is the result of some frictional torque. You should figure out which bearing is causing this. You might work out how you might move the base to eliminate this torque while you perform your experiment. One of the most useful features of a gyroscope which you will have observed is the stability of its direction of spin in space. This feature made gyroscopes to completely replace magnetic compasses. The modern device is called gyrocompass. Stable direction of spinning is used by footballers when they impart a spin to the ball as they throw it. Modern guns have rifling in the barrel which imparts a spin to the bullets which helps maintain their direction of flight. Gyroscopic stability can be understood by a consideration of Equation (1) above. Let L I f I i be a change in the angular momentum of a spinning 1 and f being the initial and final angular speed (spin) of the object, respectively, and t be the time over which a torque τ is applied, we can rewrite Equation (1) as I f Ii t . Thus if τ is small, or applied for a short time, it will have only a small effect in changing the angular momentum of the object. Now, explain why, when you want to turn a corner on your bicycle, you cannot simply turn the front wheel in the direction you want to go? What in fact, do you do in this case and why? (dh - 1974, jv - 1988, tk - 1995) Last updated by N. Krasnopolskaia in 2013