1.13 Delano Diagram 1.14 Phase Space
advertisement

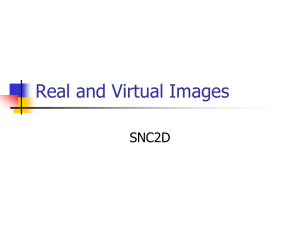
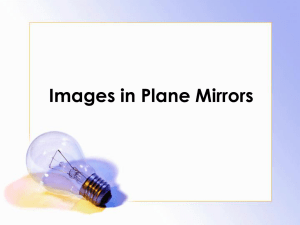
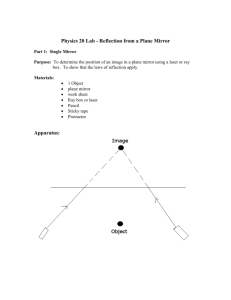
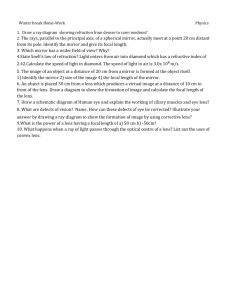
Chapter 1 20 Figure 1.7 Delano diagram, four cases. 1.13 Delano Diagram The Delano diagram or y–ȳ diagram is a visual tool of paraxial analysis (Delano, 1963; Shack, 1973; Besenmatter, 1980). It is created by tracing a principal ray (ȳ) and an axial ray (y) through an optical system and by drawing the corresponding ray heights (ȳ, y) in a single diagram. The position on the optical axis does not appear explicitly in this diagram and this representation is therefore somewhat abstract compared to a usual ray trace. But in many cases it can give an overview, that is, like a kind of shorthand notation for the system. Figure 1.7 shows four Delano diagrams that represent the different cases of matrices with zero entries. 1.14 Phase Space Looking at the set of coordinates used in matrix optics, it is near at hand to try a representation in a plane using the ray height as one coordinate, and the ray angle as the other coordinate. A set of rays in a given reference plane can then be represented as a surface in this abstract plane. To familiarize ourselves with this concept, let us choose a set of rays whose coordinates are represented by a rectangle in this so-called phase space. We would An Introduction to Tools and Concepts 21 Figure 1.8 Effect of the translation matrix in phase space. The spatial coordinate is represented along the y-axis and the angular coordinate is represented along the β-axis. Figure 1.9 Effect of the refraction matrix in phase space. As in Fig. 1.8, the spatial coordinate is represented along the y-axis and the angular coordinate is represented along the β-axis. like to see what might be the effect of the translation matrix T on this set of rays. 0 T β0 0 (1.97) → + 0 β0 β0 y0 T β0 y0 → + , (1.98) β0 β0 0 0 0 → , (1.99) 0 0 y0 y0 → . (1.100) 0 0 Graphically, this can be expressed as in Fig. 1.8. The corresponding mapping for the refraction matrix is shown in Fig. 1.9. Chapter 1 22 It is an important feature of this phase space that the “volume” (or “surface” in the two-dimensional case considered here) is conserved if we consider mappings between input and output planes where the refractive indices are 1. This conservation is a consequence of Eq. (1.19). From the theoretical point of view, it is more convenient to use coordinates (y, nβ). The corresponding “volume” (or “surface”) is then always conserved. The phase-space approach is common in laser technology (Hodgson and Weber, 1997). 1.15 An Alternative Paraxial Calculation Method An alternative paraxial method (Berek, 1930) uses distances sk measured along the optical axis and ray heights hk measured perpendicular to it as a set of coordinates for the description of a ray. For readers who use this method, it might be interesting to see how both methods are connected. They will be familiar with the so-called transition equations. These equations state how a ray is transformed that leaves a lens surface labeled with k and and that reaches another surface (labeled with k + 1) situated at a distance ek as follows: sk+1 = sk − ek , hk+1 , sk+1 = uk+1 h sk = k , uk (1.101) (1.102) (1.103) where uk+1 and uk are angles. We can combine these equations to obtain hk hk+1 = − ek . uk uk Setting uk+1 = uk , we can write the linear relation, hk 1 −ek hk+1 = , uk+1 0 1 uk which is quite similar to the relation for the translation matrix T . The other method also makes use of the relation 1 1 1 1 nk − − = nk Rk sk Rk sk (1.104) (1.105) (1.106) for the two sides of a refracting surface with radius Rk . Using uk = hk /sk for the paraxial angle, we can write this equation as follows: hk nk nk (1.107) 1 − + uk . uk = Rk nk nk An Introduction to Tools and Concepts 23 Assuming hk = hk in addition, we have an augmented linear relation of the form hk = uk 1 nk −nk Rk nk 0 nk nk hk . uk (1.108) This relation corresponds to the refraction matrix R of the matrix description. 1.16 Gaussian Brackets While cascading matrices in order to determine a system matrix, the recursive character of the problem became clear. But at this point, we were unable to state the underlying recursion law that would allow us to express the ray that finally leaves the system, and that is described by the product matrix, as a function of the input ray without performing the matrix multiplication. The use of the mathematical concept of Gaussian brackets makes it possible to state this recursion formula. An introduction to the algebra of Gaussian brackets and the recursion law for cascaded linearized optical systems was given by Herzberger (1943). In this text, the Gaussian brackets are defined by the following recursion formula: [a1 , . . . , ak ] = a1 [a2 , . . . , ak ] + [a3 , . . . , ak ], (1.109) with [ ] = 1. This implies [a1 ] = a1 , (1.110) [a1 , a2 ] = a1 a2 + 1, (1.111) [a1 , a2 , a3 ] = a1 a2 a3 + a1 + a3 , (1.112) [a1 , a2 , a3 , a4 ] = a1 a2 a3 a4 + a1 a2 + a1 a4 + a3 a4 + 1. (1.113) From Herzberger’s article, we take a description of a lens using his symbols, but arrange the linear transformation as a matrix as follows: φ1 − nd12 1 − nd12 x1 x2 12 12 = . (1.114) d d 12 12 ξ2 ξ01 φ1 + φ2 − n φ1 φ2 1 − n φ2 12 12 Using Eqs. (1.110)–(1.112), this can be recast in the following way: d12 φ , − d12 − n12 x2 1 x1 n12 = . d d ξ2 ξ01 − 12 , φ φ , − 12 , φ 1 n12 2 n12 (1.115) 2 For the general case, the recursion law reads as follows (Herzberger, 1943, Eq. (20)): φ1 , − d12 , . . . , − dk−1,k − d12 , φ2 , . . . , − dk−1,k x1 n12 nk−1,k φ12 nk−1,k x = . (1.116) d ξ d12 ξ01 − , φ , . . . , φ φ1 , . . . , − nk−1,k k k n12 k−1,k 24 Chapter 1 In the framework of the matrix method presented in this text, I found no way to state the recursion law with a similar conciseness. Therefore, I would like to make the reader avert of the Gaussian-brackets method that allows for such a formulation. It is beyond the scope of this book to derive the method here, and interested readers are referred to Herzberger’s work. In optical design, Gaussian brackets were applied to the layout of zoom systems (Pegis and Peck, 1962; Tanaka, 1979, 1982). Chapter 2 Optical Components 2.1 Components Based on Reflection Mirrors are a key component of many optical devices. The matrix for the reflection at a spherical mirror was considered in the introductory chapter. We will now discuss reflectors more generally. 2.1.1 Plane Mirror The matrix describing the reflection at a plane mirror can be obtained by taking the matrix for reflection at a spherical reflector and letting the radius of the spherical mirror tend to infinity. In this way, the unity matrix is obtained as A= 1 0 0 1 . (2.1) The signs that appear in this matrix are surprising at first, and it is instructive to derive the matrix also in an alternative way. In Fig. 2.1, the reflection of a ray at a plane mirror, which is perpendicular to the optical axis, is depicted. In the matrix representation used here, we unfold the ray using the reference plane of the mirror as the symmetry element. Figure 2.2 shows the result of this “unfolding.” It is this coordinate break that causes the positive signs in the matrix of the plane reflector. Figure 2.1 Plane mirror. Chapter 2 2 Figure 2.2 Unfolded plane mirror. 2.1.2 Retroreflector Unlike a plane mirror, a retroreflector redirects the beam back into the same direction from where it came. In the matrix description, this is expressed by a negative sign of the matrix entry a22 . Reflection at a retroreflector is combined with a change in the height of the beam. The height of the incident beam is changed from y in to y out = −y in . This corresponds to a parallel shift and is expressed by a negative sign of the matrix entry a11 . The complete matrix of the retroreflector reads as −1 0 A= . (2.2) 0 −1 More generally, a retroreflector has the following matrix: −1 a12 . A= 0 −1 (2.3) 2.1.3 Phase-Conjugate Mirror An element that redirects an incident beam into itself without any shift in ray height would be described by the following matrix (Lam and Brown, 1980): 1 0 A= . (2.4) 0 −1 There are devices that exploit nonlinear optical effects and that are able to operate in such a way on an incident laser beam. To describe these so-called phase-conjugate Optical Components 3 mirrors in the paraxial approximation, the matrix stated above can be used. The nonlinear effect itself is far beyond the scope of this approach. Retroreflectors, on the other hand, can be advantageously modeled using the matrix method. 2.1.4 Cat’s-eye Retroreflector A prominent example of this type of optics is the cat’s-eye retroreflector. It basically consists of a lens and a plane mirror (Fig. 2.3). The distance between the lens and the mirror is chosen as the focal length of the lens (with respect to the backward principal plane of the lens). The lens will be approximated as a thin lens. To describe the plane mirror, we can use the matrix given earlier [Eq. (2.1)]. The distances involved are first designated by g and b. Following the ray through the unfolded arrangement, we find the following matrix chain: 1 0 1 1 g − f1 1 0 0 1 1 0 1 b × − f1 1 0 1 S= 1 0 0 1 1 g . 0 1 b 1 After performing the matrix multiplications, we have 2 + 2 gf fb − 1 1 + 2 fb fg − 1 − 2 fg 2g + 2b − 4 bg f . S= 2 b −1 2 fg fb − 1 + 1 − 2 fb f f (2.5) (2.6) We know that letting b = f makes the arrangement work as a cat’s-eye retroreflector. It is instructive to see what happens if we choose the entrance and exit planes of the system either at the position of the lens or at a distance f in front of it. The first alternative corresponds to setting g = 0 and the second one to letting g = f . In this way, we find −1 2(f − g) S(g = 0, b = f ) = (2.7) 0 −1 Figure 2.3 Cat’s-eye arrangement. Chapter 2 4 and S(g = f, b = f ) = −1 0 0 −1 . (2.8) The form of the second matrix is equal to the matrix of a retroreflector stated in Eq. (2.2). 2.1.5 Roof Mirror A roof mirror is formed by two plane mirrors meeting at a right angle. This optical arrangement is also being designated as a double mirror (DeWeerd and Hill, 2004). We will consider the plane that is perpendicular to the roof edge. In this plane, the mirror can be unfolded as shown in Fig. 2.4 using an x–y plane as the plane of symmetry. The coordinates of the rays that leave the mirror after reflection can be found by tracing a rectilinear line through the unfolded arrangement. If we first ignore the coordinate break caused by the unfolding operation, the figure shows the passage of a ray through a distance 2t. This propagation can be described by the following matrix: 1 2t T = . (2.9) 0 1 Additionally, it has to be taken into account that the orientation of the reference axis changes due to the unfolding operation. The corresponding change of signs of the coordinates in the new coordinate system can be seen in Fig. 2.4 and expressed by the following matrix: −1 0 . (2.10) 0 −1 Combining, this gives the component matrix, −1 0 1 2t −1 −2t S= = . 0 −1 0 1 0 −1 (2.11) Therefore, a roof reflector acts like a retroreflector [Eq. (2.3)] in the plane that is perpendicular to the roof edge. Figure 2.4 Unfolding the roof mirror. Optical Components 5 Figure 2.5 Arrangement with roof mirror and plane mirror. It is interesting to see how a combination of this roof mirror and a plane mirror as depicted in Fig. 2.5 would act on a ray. To this end, it is advantageous to unfold the optical arrangement with respect to the reference plane of the plane mirror. This leads to the following matrix chain: −1 −2t 1 b 1 0 1 b −1 −2t S= . (2.12) 0 −1 0 1 0 1 0 1 0 −1 The evaluation of this matrix product gives the system matrix of the arrangement of Fig. 2.5 as follows: 1 4t + 2b S= . (2.13) 0 1 This equation has some similarity to the equation of a plane mirror, but is of the following more general form: 1 a12 . (2.14) A= 0 1 2.2 Components Based on Refraction Lenses are of course very prominent examples of optical components based on refraction. Because their description using the matrix method has been treated in other chapters, other components based on refraction will be considered here. 2.2.1 Plane-parallel Plate The plane-parallel plate is a component that is often encountered in optical setups. It can be a simple glass plate used for path-length compensation or a component that is used to influence the polarization and has the form of a plate. Its system