Analysis of ground vibration transmission in high precision
advertisement

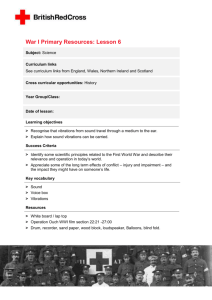
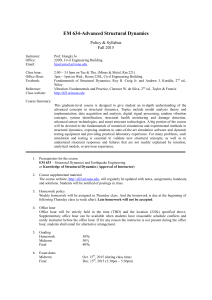
Analysis of ground vibration transmission in high precision equipment by Frequency Based Substructuring G. van Schothorst1 , M.A. Boogaard2 , G.W. van der Poel1 , D.J. Rixen2 1 Philips Innovation Services, Department Mechatronics Technologies High Tech Campus 7, 5656 AE Eindhoven, The Netherlands e-mail: Gert.van.Schothorst@philips.com 2 University of Technology, Faculty 3mE, Dep. Precision and Microsystems Engineering Mekelweg 2, 2628 CD Delft, The Netherlands Abstract Machines with high accuracy that are sensitive to ground vibrations are generally designed using crude assumptions on the dynamic properties of the floor where they are placed. The effect of dynamic coupling between floor dynamics and machine dynamics is generally omitted. This also holds for the prediction of machine accuracy in the design phase, based on expected or measured ground vibration spectra. In this paper, experimental dynamic substructuring methods are exploited to predict machine vibrations in situations where the machine is placed on a non-rigid, dynamic floor. More specifically, a new Transfer Path Analysis is demonstrated based on the Frequency Based Substructuring technique for the case that ground vibration levels are measured for free interface conditions. The method can be seen as the dual counterpart to earlier presented approaches [1], where the disturbance vibrations have been measured in fixed interface conditions (so-called blocked forces or equivalent forces). After proper coupling of the machine model with the experimental characteristics of the floor dynamics, these ground vibrations are translated into machine vibrations. The method is demonstrated on a practical implementation. A simplified experimental model, similar to the dynamics present in high-precision machines, has been built and measured. From experimental work performed, some lessons regarding the applicability of this method will be presented. In conclusion, using the Frequency Based Substructuring method, more accurate performance prediction of (high precision) equipment on factory floors is made possible, potentially saving costly and conservative design choices in the machine design. 1 Introduction It is well known that floor vibrations are one of the main disturbance sources for high precision equipment [2, 3]. Especially for equipment in the semiconductor industry, like photolithographic machines, but also in the field of metrology (e.g. electron microscopes), the impact of floor vibrations on the machine accuracy is generally determining the dynamic architecture of the system [4]. This may imply design choices like the selection of the vibration isolation system, machine frame mass, machine frame support stiffness and internal machine dynamics characteristics. Although there is ample attention for the role of the floor vibration level, often specified in terms of socalled VC-curves (Vibration Criteria) [3], the attention for the dynamic behavior of the floor itself, possibly in combination with the machine dynamics, is only gradually growing. In precision engineering practice, the design of the machine is often guided by dynamic modeling of the machine itself, either lumped mass approach or using finite elements. The floor is assumed either infinitely stiff, or in better cases approximated with a finite stiffness at the interface locations between machine and floor. 3501 3502 P ROCEEDINGS OF ISMA2012-USD2012 One of the reasons behind is, that the equipment development industry has less (access to) knowledge of building dynamics, and moreover it is not a priori known on which floor the machine will be placed. Nevertheless, from a dynamics point of view, it is straightforward to see the importance of including the effect of floor dynamics in the machine dynamics analyses during the design. Firstly, the machine dynamics will alter due to the fact that the machine is placed on a non-rigid floor. And secondly, the floor dynamics, and therewith the effective floor vibration level, will alter due to the placement of a (heavy) machine on the floor. Therefore, like the widespread use of VC-curves to specify floor vibration levels, it is considered to be useful to have methods to further quantify and possibly specify floor dynamics, preferably based on experimental data, in order to predict the coupled machine dynamics behavior. This paper intends to present and demonstrate a method, which allows for incorporation of floor dynamics in the analysis of high precision equipment accuracy. In section 2, the selected approach will be motivated and worked out in more detail, including a summary of the underlying theory. After that, section 3 describes how the approach is applied to a simplified but experimental test case. The results are discussed in section 4 and section 5 finally gives the conclusions. 2 Approach to incorporate ground vibrations 2.1 Motivation for the chosen approach High precision motion systems can be represented by a simplified machine model like in figure 1. The machine is connected to the floor with a finite stiffness; the big frame generally has a significant mass. A guided motion system (small moving mass, ms ) is driven by an actuation system, which has its reaction forces f exerted on the machine frame. A third part of the machine (mr ), which is connected with a finite stiffness (relatively compliant spring) to the machine frame, acts as a reference frame, used to measure the position U of the motion system relative to it. kf mr f U ms mf rame kmount kmount Figure 1: Schematic representation of simplified machine model When analyzing the effect of ground vibrations on machine performance during system design, obviously with more sophisticated models of the machine to be designed than depicted above, there are a few rather simplistic approaches for incorporating the contribution of the floor, as indicated in figure 2. • Infinitely stiff floor. This approach is only valid if the machine is relatively light weight and the machine connection stiffness is relatively low as compared to the (local) floor stiffness. This is generally not true for high precision equipment. • Floor stiffness added to machine model. This approach is widely used in precision engineering practice. It takes the finite stiffness of the floor into account, which improves the prediction of machine vibration modes due to the fact that the floor stiffness is in the same order of magnitude as the internal stiffness of the machine, and sometimes even lower. An advantage of this method is that in many cases S UBSTRUCTURING AND COUPLING 3503 it is possible to experimentally identify the (local) floor stiffness with a hammer impact measurement. However, the method still does not account for specific dynamic characteristics of the floor, which may especially be of importance if the internal floor resonances are in the same frequency region as the machine resonances. • Single Degree of Freedom oscillator to represent floor dynamics. From literature on floor dynamics in relation to machine performance [5], it is clear that a floor is better characterized with a mass, spring and damper than with only a spring. Although this is not (yet) common practice in precision engineering, it will be shown that this rather simple approach would already improve prediction performance for machine vibrations. U U f kmount U f kmount f kmount kmount kf loor kf loor kmount kmount mf loor kf loor cf loor Figure 2: State of the art approaches for incorporating floor vibrations in machine modeling: 1) imposing floor vibrations from an infinitely stiff floor (left), 2) taking finite floor stiffness into account (middle), 3) single degree of freedom dynamic model of floor (right) Although from the approaches presented here, the third method is preferred, it still requires a proper quantification of the floor dynamics, e.g. by experimental identification or by specification to end-users. Furthermore, it still does not incorporate more complex floor dynamics including multi degree of freedom mode shapes. Therefore, a more generic approach is chosen to cope with the coupling between the machine dynamics and the floor dynamics, as schematically depicted in figure 3. In this figure, the solid black rectangle represents the floor dynamics (i.e. is a dynamic system in itself) and the upper part represents the machine dynamics. Note furthermore, that a more generic approach will not restrict the machine model to the usual structure of high precision equipment as sketched in figure 1, but will also be applicable to other systems like medical imaging equipment, metrology systems, robots and other positioning devices that may suffer from floor vibrations. U f f loor Figure 3: Schematic representation of machine on the floor As explained in the following sections in more detail, we utilize the method of Dynamic Substructuring to properly describe the dynamic coupling between the machine dynamics and the floor dynamics. Starting point is firstly, that a machine model is assumed to be available, generally as a result of dynamic modeling during the machine design phase. The machine model is presumed to have free interface conditions, i.e. 3504 P ROCEEDINGS OF ISMA2012-USD2012 the machine is modeled without a floor. In case of existing equipment or prototypes, these models may be obtained from (modal analysis) measurements, although special attention is required to get proper measurements. Especially with heavy machines, it is hardly possible to obtain free interface measurements; the machine should be softly suspended for that. An alternative is to measure the machine dynamics on an extremely rigid floor, or to use (piezo-electric) shakers with impedance sensors. Secondly, the floor dynamics are generally not available as a numerical model, so it is assumed to be obtained from experimental responses (measured without the machine present). Note here, that the experimental responses from the floor is typically obtained as free interface responses, as it will be impractical to provide a rigid fixation of the building at the interface location. As a third ingredient in the chosen approach, it is assumed that the floor vibration level of the building is characterized with power spectrum measurements before the machine is installed. An alternative is, that a vibration criterion (e.g. VC-D) is taken as input spectrum for the coupled system analysis. The ultimate goal of the proposed approach is, to translate the measured ground vibration level (obtained in free response of the floor dynamics, i.e. without machine present), into machine response, taking the coupling between machine and floor dynamics into account. 2.2 Dynamic Coupling Dynamic Substructuring allows analyzing of complex systems by analyzing its substructures. The description of the substructures can be in three different domains, the physical domain, the modal domain and the frequency domain. The technique is equivalent for each domain. In this paper only the frequency domain will be discussed. For more information on all three domains see [6]. To apply Dynamic Substructuring to the total system as shown in figure 3, the system will be divided into two substructures. One substructure will represent the machine and the other will represent the floor, as shown in figure 4. The region between these two substructures represents the interface, which will be discussed into more detail. The mathematical background of the approach is worked out below. um o um i U fim um c um c λ λ f loor Figure 4: Schematic representation of machine on the floor Consider the total system as given by um fim Yiim Yiom Yicm 0 0 i um Y m Y m Y m 0 fm 0 o oi o oo oc um Y m Y m Y m 0 f m + g m 0 = c ci c c co cc f f f uc 0 0 0 Yccf Ycif fc + gc 0 0 0 Yicm Yiim ufi fif (1) S UBSTRUCTURING AND COUPLING 3505 Where the superscript m indicates that these entries are related to the machine and f indicates that these entries are related to the floor. The subscript i denotes that these entries are related to the input DOF, o denotes that these entries are related to the output DOF and c denotes that these entries are related to the coupling DOF, as indicated in figure 4. The forces f are the externally imposed forces and g are the reaction forces related to the coupling between these substructures, in figure 4 indicated with the blue arrows. For the substructures in equation 1 to act like the total system, it must fulfill two conditions. The first condition is known as the compatibility condition, which ensures that the distance between the interfaces of the coupled substructures should be zero. The second condition is known as the equilibrium condition, which ensures that the interface between each substructure is in equilibrium. Mathematically this is given by f um c − uc = 0 gcm + gcf = 0 (2) Because the reaction forces should be equal, but with an opposite sign, a Lagrange multiplier λ is used, so gcf equals −λ and gcm equals +λ. Next the third and fourth row of equation 1 are substituted into the compatibility condition and solved for λ. Now λ can be substituted into equation 1 and the total system can be solved when it is assumed that all the transfer functions and applied forces are known. For this application either or both the applied forces and the transmissibility function related to the floor are not known, so these will be omitted here. These will be dealt with in the next section. So finally the dynamic coupling is given by m m 0 ui −1 fim m m m m f m m m um 0 Ycc + Ycc Yci Yco Ycc fo (3) =Y f −Y o m fcm I uc Note that from this equation it follows that the dynamic coupling now only depends on the machine and the interface flexibility of the floor. 2.3 Transfer Path Analysis For some applications it is not possible to either measure the operational forces or the transmissibility from the point where the operational forces are applied to the interface. To still be able to calculate the response of the total system to these forces, a technique called Transfer Path Analysis (TPA) can be used. In 2010 De Klerk and Rixen [1] published a TPA method based on a fixed interface. For this method the interface of one substructure is fixed and the reaction forces are measured while this substructure was operational. When this substructure is then assembled to a second substructure and the reaction forces are applied as external forces on the interface, it can be shown that the response of the second substructure to the applied reaction force is equivalent to the response of the coupled system to the original operational forces. The response of the substructure where the excitation is located will however be different. This method was developed to analyze how the gear forces of the differential of a car would change the noise inside the car. This method is commonly known as the blocked force method. Because it is quite impractical to fix the interface of the floor rigidly, another method should be used. Recently Rixen et al. [7] published an analogous method, based on the free interface. So instead of a fixed interface, the interface is now completely free and instead of reaction forces, the free vibrations are measured. Reconsider the system of equation 1. When the third and fourth row are substituted in the compatibility condition and the Lagrange multiplier λ is substituted for the applied forces on the interface, the following equation is obtained m m m Yii Yiom Yicm 0 ui fi m Ym m um Y Y 0 fom oo oc o = oi (4) 0 Y m Ycom Yccm + Yccf −Y f λ ci ci ufi fif 0 0 −Yicf Yiif 3506 P ROCEEDINGS OF ISMA2012-USD2012 Note that there are no externally applied loads on the interface. These can however be applied easily, see [7]. Next suppose that there is an imposed excitation, which can either be a force or a displacement, on the internal DOF of the floor. Then the last row of equation 4 can be eliminated. Which in the case of an imposed force results in m m m ui Yii Yiom Yicm fi m m m um Yoc fom (5) = Yoi Yoo o f f f m m m λ Yci fi Yci Yco Ycc + Ycc Let us now define a new problem where there is a displacement differential δc is imposed on the interface DOF. The compatibility condition is then defined as f um c − uc = δc (6) In other words, the distance between the interface of the substructures is no longer zero, but a certain interface gap is imposed. In this alternative problem, comparing to 4, the total set of equations is given by m m m Yii Yiom Yicm 0 ui fi m m um Yoim Yoo fom Y 0 oc o = δc Y m Ycom Yccm + Yccf −Y m λ ci ci 0 ufi 0 0 −Yicf Yiif (7) From equation 5 and 7 it can be easily seen that these are equivalent for what concerns the machine, when the interface gap δc is equal to Ycif fif . If the same force is applied on the internal DOF of the floor when the interface is free, it is easily shown that the free vibrations at the interface are equal to Ycif fif . In other words, with reference to figure 5, if the free substructure A has a vibration level at the interface due to internal forces like depicted in the left part of the figure, then the resulting vibrations of the coupled system, as far as substructure B is concerned, are equal to those of the system depicted at the right, where the corresponding interface gap displacements are imposed between the two substructures at the interface. mB 2 mB 2 uB o k1B δ̄c mA 2 f¯iA mB 1 uA c k2A mA 1 k1A uA i mA 2 f¯iA uB c uA c k2A mA 1 k1A uB o k1B ≡ mB 1 uB c δ̄c mA 2 uA c equ uA i equ k2A uA i mA 1 k1A Figure 5: Equivalence of interface gap with internal floor disturbance: Free interface vibrations (left), original system (center) and equivalent system (right). This basically summarizes the approach to predict machine vibrations under the presence of floor vibrations, as they are measured under free interface conditions. S UBSTRUCTURING AND COUPLING 3507 3 Application to test case For the test case described in Section 3.1, as a first step the floor dynamics have been characterized in absence of the test set-up, as described in the Section 3.2. After that, the test-case was placed and the coupled response was measured, as reported in Section 3.3. Finally, it will be described in Section 3.4 how the vibration levels have been measured, first of the free floor vibrations and second of the test case placed on the floor with the same disturbance, on which a Transfer Path Analysis was applied. 3.1 Description of test case With the schematic machine model as indicated in figure 1 in mind, and considering that the free moving body of the guided motion system is not the primary interest in this study, a test case has been designed which basically simulates the machine. A schematic representation is shown in figure 6. This test case consists of uro ref. kt frame km cm fi cm km mount Figure 6: Schematic representation of test case three rigid bodies, one represents the mount which will be coupled to the floor, the second represents the frame on which the reaction forces are applied and the third represents the reference frame. In this setting, the main variables of interest are the vibration levels uro of the reference, while incorporating the dynamic behavior of the floor, as a result of two disturbances: • (reaction) forces on the machine frame. The vibration levels due to this disturbance are represented as a frequency response function, by the accelerance of the system. • (free) vibration levels of the floor. The vibration levels due to this disturbance are represented as a power spectrum, given the presence of a certain floor disturbance. The realized experimental set-up for the test case is depicted in figure 7. In this setup the frame is represented by a large granite block of 1150 kg which is suspended from the floor by four compressed disc springs. The total stiffness is about 107 N/m, which results in a vertical vibration mode at 15 Hz. The second mass, a block of 110 kg, represents the reference. This mass is suspended on passive air mounts, which should provide a suspension frequency of about 6 Hz. Although experimental models (describing the multi DOF dynamics by frequency responses) of the realized test set-up have been obtained based on accelerance measurements on an extremely rigid floor, these models had limited quality for a number of reasons, like non-linearity in the disc springs of the suspension to the floor. More details can be found in [8]. To demonstrate the applicability of the methods presented in section 2, the dynamics of the test set-up will be represented by a relatively simple numerical model in the remainder of this section. The model is chosen like depicted in figure 6, but excluding the mass for the reference frame. The parameters (mass, damping and stiffness) have been fitted on experimental responses, when the test setup was placed on an extremely rigid floor. Although the model has vertical translations and two tilt rotations as degrees of freedom, only the vertical translations will be analyzed further in the next sections. 3508 P ROCEEDINGS OF ISMA2012-USD2012 Figure 7: Realized experimental set-up of test case 3.2 Experimental characterization of floor dynamics To experimentally determine the response of a floor, there are several techniques available. In this case it is chosen to obtain the response of the floor from impact measurements, using a large impact hammer from PCB, type 086D50. A building typically has a lot of damping, so a couple of things should be taken care of when performing impact measurements. Because of the large damping, the frequency resolution might be a problem. The response in this case lasted less than half a second, resulting in a frequency resolution of 2. For a typical factory floor the eigenfrequency is between 10 and 20 Hz, so a much better frequency resolution is needed. When longer measurement blocks are used, more background noise is measured. If this noise is harmonic, for instance caused by a pump, it will appear as a resonance peak. To minimize the response caused by the background noise, an exponential window can be used. Generally an exponential window is known to increase the measured damping. For a floor measurement, another problem occurs. Because floor measurements are always done in-situ, there are no rigid body modes, so the acceleration at 0 Hz should be zero and the response for low frequencies is also very small. For the measurement system used in this case, even at AC settings, there was still a small constant signal present. Without an exponential window, this would not cause a problem, only a peak at 0 Hz. When an exponential window is applied, this signal now depends on time. In the response function this will appear as if there are rigid body modes. By removing the constant before the window is applied, this can be easily solved. Finally a response as shown in figure 8 is obtained. Besides the measured floor accelerance, figure 8 also gives the approximative floor characteristics according to the methods discussed in section 2.1. It is clear, that the low frequency behavior of the floor is well approximated by the stiffness characteristic (in this case a stiffness of 7.7·107 N/m), while the first resonance of the floor at 12 Hz can be approximated by the SDOF oscillator response. On the other hand, it is also clear that more modes are present in the floor (e.g. 15 Hz) that are not captured by the SDOF oscillator. 3.3 Experimental results of coupled response To experimentally validate the method as explained in section 2.2, the model as described in section 3.1 is used (see also figure 6). For this validation, the translational response of the frame caused by the input force fi is predicted using the model and validated with experimental responses from the realized test case. To S UBSTRUCTURING AND COUPLING 3509 accelerance (ms−2 /N ) 10−3 measurement linearized stiffness SDOF response 10−4 10−5 10−6 10−7 1 10 frequency (Hz) 50 Figure 8: Free interface floor dynamics measurement. Experimental accelerance of floor (solid); fitted single degree of freedom oscillator response (dotted); approximate linearized stiffness (dashed) obtain a representative model, the test case was first placed on a very rigid floor, on which the test case is assumed to behave as if it is fixed at the mounts. On this measurement, the parameters for the model are fitted. Next this model is coupled to the floor measurements as obtained in section 3.2, which results in a prediction of the response on this non-rigid floor. The actual response of the test case on this non-rigid floor is also measured and provides a validation response. These three responses are shown in figure 9. accelerance (ms−2 /N ) 10−2 fixed prediction validation 10−3 10−4 2 5 10 frequency (Hz) 20 50 Figure 9: Machine dynamics accelerance response including coupling effects. Rigid floor (dotted), predicted response on non-rigid floor (solid) and validated response on non-rigid floor (dashed). From this figure it can be concluded that there is a lot of dynamic coupling around the first eigenfrequency of the floor. Furthermore the amplitude of the first mode of the frame is less for the coupled response. It is found that this technique is able to predict both these eigenfrequencies properly. For frequencies above 18 Hz, the predicted response is almost the same as the fixed response, which indicates that there is no dynamic coupling above 18Hz. It was found that the experimental responses for the rigid floor and the non-rigid floor are also equal, which indeed indicates that there is no dynamic coupling above 18 Hz. The difference between the predicted and the measured response on the non-rigid floor (beyond 18 Hz) may be explained by the mismatch between the fitted model and the experimental frequency responses of the test set-up. 3.4 Experimental results of Transfer Path Analysis To validate the technique from section 2.3 (equation 7 and figure 5), both ingredients from the previous two sections are needed, as well as the free vibration level of the (non-rigid) floor. To provide a constant 3510 P ROCEEDINGS OF ISMA2012-USD2012 disturbance for this measurement, a shaker with a small reaction mass was placed on the floor, near to test case. This shaker was excited with a two-tone signal at 12 and 16 Hz. To measure the floor vibrations, four accelerometers are placed next to the four mounts of the test case and a time trace of 1600 seconds is recorded. The frequency resolution should of course be equal to the frequency resolution of the other measurements, which is 0.25 Hz, so 400 blocks can be made from this measurement. This measurement is done without the test case, to obtain the free vibration level δc , and with the test case for a validation measurement. The response of all four signals is averaged to obtain only the vertical translational vibrations. The free vibrations are used in equation 7 to predict the new vibration level of the floor. The results are shown in figure 10. 10−6 power (m2 s−4 ) free prediction validation 10−7 10−8 10−9 10 11 12 13 14 15 16 frequency (Hz) 17 18 19 20 Figure 10: Validation of Transfer Path Analysis. Measured free floor vibrations (dotted), predicted vibrations with coupling (solid) and validated vibrations with coupling (dashed) From these results it appears that in the measurements there is hardly any change between the vibration levels of the free interface floor and the coupled system where the test case is placed on the floor. The only difference is at the two excited frequencies, which seems slightly amplified by the test case. There is however a lot of difference predicted by the transfer path analysis method applied here. Only at 12 Hz the vibrations are predicted accurately, but at 16 Hz the vibrations are underestimated. Overall it can be concluded that the method from section 2.3 is not yet validated with this experiment. A possible explanation is that the floor may behave non-linear. The response of the floor has been obtained with an impact force input of about 5 kN, whereas the forces in the validation experiment have been orders of magnitude smaller. Apparently, the floor behaves much stiffer at these small signal levels, causing a strongly reduced impact of the coupling between floor and machine dynamics due to the presence of the test case. 4 Comparison of floor coupling techniques Although the proposed Transfer Path Analysis method could not yet be fully validated on the selected test case, the experimental results on Frequency Based Substructuring (FBS) gave good confidence in being able to predict the effect of floor dynamics on the coupled response [8]. Therefore, this method will now be exploited to make a comparison between the methods described in section 2.1 at one hand, and the FBS approach on the other hand. This will be done for dynamic coupling in section 4.1 and for the ground vibrations in section 4.2. Hereby, the machine dynamics will be represented by the model of figure 6, now including the additional DOF for the reference frame. For the floor dynamics, the experimental floor characteristics from section 3.2 will be used. S UBSTRUCTURING AND COUPLING 4.1 3511 Coupled machine / floor model In this section the three methods from section 2.1 will be compared to the method from section 2.2. From the experimental results it was found that the Frequency Based Substructuring method was able to predict the actual response fairly well [8] (see also figure 9), so this will be the reference case for what the actual response will be and this will be referred to as the full coupling case. In this section the response is considered from a force on the frame to accelerations of the reference frame, as shown in figure 6. The fixed response of this model is very easily obtained by fixing the coupling DOF. For the method where only the floor stiffness is taken into account, a spring is added for each physical coupling DOF, four in this case, with a stiffness of 7.7 · 107 N/m, which is the same value as shown in figure 8. The three responses are shown in figure 11. accelerance (ms−2 /N ) 10−2 fixed floor stiffness full coupling 10−3 10−4 2 5 10 frequency (Hz) 20 50 Figure 11: Transfer function in the machine, from frame to the reference: fixed response (dotted), only floor stiffness (dashed) and actual response (solid) From this figure it can be concluded that for this case the response of the machine has not improved, when only the floor stiffness incorporated into the model. Because the floor stiffness is placed at each mount, the total stiffness is four times the actual stiffness and therefore the response with the floor stiffness is almost identical to the fixed response. Next the mass and the damping of the floor is added to the model. It is assumed that the area under the machine behaves rigidly for the frequency range of interest, so all four mounts are rigidly attached to the rigid body, which represents the floor. The mass of the floor is around 14 · 103 kg and the damping is 10%, such that a response as shown in figure 8 is obtained. The response of the machine with the floor modeled as an SDOF oscillator, together with a fixed and actual response is shown in figure 12. From this figure it can be concluded that for this case the SDOF approximation is a much better assumption. The damping of the floor is apparently not completely well estimated with a viscous damping model, hence the slightly deeper anti-resonance, but the three eigenmodes of this system are very well estimated. The peak at 15 Hz originates from a second mode of the floor, which is not present in an SDOF approximation. 4.2 Transfer Path Analysis Although the TPA method from section 2.3 is not validated with an experiment yet, it is still interesting to see what the vibrations of the reference frame will be as predicted with this method, compared to a more classical approach, directly imposed vibrations on the mounts of the machine. For this comparison the machine model of figure 6 is used again, and a flat power spectrum is assumed for the floor. In the first case, these vibrations are directly applied as imposed accelerations on the mounts of the machine and the vibrations of the reference frame are computed. For the second case, these vibrations are used as the interface 3512 P ROCEEDINGS OF ISMA2012-USD2012 accelerance (ms−2 /N ) 10−2 fixed SDOF floor full coupling 10−3 10−4 2 5 10 frequency (Hz) 20 50 Figure 12: Transfer function in the machine, from frame to the reference: fixed response (dotted), SDOF floor (dashed) and actual response (solid) gap δc and then the vibrations of the reference frame are computed. These two vibration levels, together with the original free vibration level of the floor are shown in figure 13. 101 floor direct transmission power (m2 s−4 ) 100 10−1 10−2 10−3 1 10 frequency (Hz) Figure 13: Modeled transmission of floor vibrations to a simple machine model. Free floor vibrations (dotted), directly applied vibrations (dashed) and transfer path analysis vibrations (solid) From this figure it is clear that the directly applied vibrations do not take the coupled dynamics into account, whereas the TPA method clearly shows the dynamic coupling in the vibration level. It can also be concluded that when there is no dynamic coupling, both methods are equal. 5 5.1 Conclusions and outlook Conclusions In current precision engineering practice, prediction of high precision equipment accuracy relies on rather crude approximations of floor characteristics. In this paper, more advanced methods for incorporating the coupling of the machine dynamics with (measured) floor dynamics have been presented, including implementation on an experimental test case. The method presented also allows for predicting machine vibration levels on a specific floor, of which both the dynamic characteristics and the (free interface) vibration levels are known. This approach is especially useful in engineering applications, where the machine is being designed while the floor characteristics, both dynamics and vibration levels, are known a priori, either from measurements or by means of specification. S UBSTRUCTURING AND COUPLING 3513 Related to the effect of coupling between machine dynamics and floor dynamics, it can be concluded that coupling of (numerical) machine models with (experimental) floor characteristics, based on Frequency Based Substructuring (FBS) methods, is successfully implemented. Comparing the different approaches available for dealing with this coupling, more advanced methods will typically better approach the real coupling. Assuming a rigid floor is only valid if the machine support stiffness is relatively low with respect to the actual floor stiffness. Assuming a finite floor stiffness can be a better approximation, but will omit the influence of any dynamics, that is generally present in non-rigid floors. A better approximation is then to use a Single Degree of Freedom (SDOF) oscillator model for the floor, although that still omits other mode shapes of the floor. In fact, full coupling via e.g. the FBS approach is the only way to correctly incorporate floor dynamics in machine dynamics modelling for high precision applications. This is especially true for applications where performance is determined by first machine resonances that are typically in the same frequency range as floor dynamics resonances, e.g. from 10 - 20 Hz, which is quite realistic, like in the presented test case. Related to the prediction of machine vibrations based on measured (free interface) floor vibrations, it can be concluded that the FBS approach provides a good framework to do so, with a so called Transfer Path Analysis (TPA), which directly incorporates coupling effects. Although the method is succesfully implemented in practice, the results could not yet be validated by real life experiments on the test case. A possible reason for this is non-linearity, whereas the models have been obtained under different signal conditions (impact measurement) than the validation experiment that was performed to apply the TPA method (steady state multi-sine). Despite the fact that the TPA method was not validated on the experimental test case at hand, the experimental results of the FBS approach give good confidence, and it is recommended to further introduce the presented approach in dynamic analysis of the effect of floor vibrations in high precision equipment. 5.2 Outlook Based on the results presented in this paper, it is recommended to further validate the presented approach. Firstly, that would imply a further analysis of possible non-linear behavior in either the machine dynamics or the floor dynamics, by using different signal types and amplitudes. Secondly, an even more simplified test case might be realized to validate the the Transfer Path Analysis method in practice. Against the background of current precision engineering practice, where only the floor vibration level and possibly floor stiffness is specified to predict machine accuracy, the presented work leads to the insight that at least a Single Degree of Freedom oscillator model should be introduced to represent the floor dynamics. If only the first resonance frequency and the effective modal mass of the floor are known, this would already allow for a much more accurate prediction of the coupled dynamics. In more advanced applications, the introduction of full coupling with experimental floor models by Frequency Based Substructuring will allow for even more accurate performance prediction of (high precision) equipment on factory floors. This way, one may potentially avoid costly and conservative design choices in the machine design. References [1] D. de Klerk and D.J. Rixen, Component transfer path analysis method with compensation for test bench dynamics, Mechanical Systems and Signal Processing, Vol. 24, No. 6, (2010), pp. 1693 - 1710. [2] E.I. Rivin, Vibration isolation of precision equipment, Precision Engineering, Vol. 17, No. 1, (1995), pp. 41-56. [3] C.G. Gordon, Generic criteria for vibration-sensitive equipment. International Society for Optical Engineering (SPIE), Vol. 1619, (1992), pp. 71-85. 3514 P ROCEEDINGS OF ISMA2012-USD2012 [4] R.M. Schmidt, G. Schitter, J. van Eijk, The Design of High Performance Mechatronics, Delft University Press, Delft (2011). [5] H. Amick, S. Hardash, P. Gillett, and R.J. Reaveley, Design of stiff, low-vibration floor structures, International Society for Optical Engineering (SPIE), Vol. 1619, (1992), pp. 180-191. [6] D. de Klerk, D.J. Rixen and S.N. Voormeeren, General framework for dynamic substructuring: history, review and classification of Techniques, AIAA Journal, Vol. 46, No. 5, (2008), pp. 1169-1181. [7] D.J. Rixen, M.A. Boogaard, G. van Schothorst and G.W. van der Poel, Blocked forces and free displacements approaches for vibration transmission analysis, Mechanical Systems and Signal Processing, (submitted). [8] M.A. Boogaard, Machines with high accuracy on factory floors, Master of Science thesis, TU Delft (2012)