Math12 3-2 Solutions
advertisement

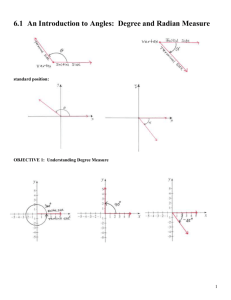
CHAPTER 3 LESSON 2 Teacher’s Guide Angles in Standard Position AW 3.3 MP 4.1 Objective: • To define standard position and to investigate the properties of angles in standard position 1) Angles as Rotations Any angle may be viewed as the rotation of a ray about its endpoint. Consider a ray OB that is then rotated about its endpoint O to form ∠AOP with vertex O. By agreement, we say that such a counter clockwise rotation produces angle. In this case, ∠AOP = +40°. a positive Side OP is called the initial Side OP is called the terminal side or arm of ∠AOP. side (or arm) of ∠AOP. Rotating the ray OA in a clockwise direction produces a negative angle. In this case, ∠AOP1 = −40°. As before, side OA is called the initial side (or arm) of ∠AOP1 . Side OP1 is called the terminal side (or arm) of ∠AOP1 . 2) Definition of Standard Position To study angles with respect to the Cartesian coordinate system, we must first agree on a set way to place an angle in the coordinate plane. We say that an angle θ is in standard position in the coordinate plane if the following two requirements are satisfied. a) The vertex of the angle θ is at the origin. b) The initial side of θ lies on the positive x–axis. Let’s place the angle θ below in standard position. Example 1: Draw a positive angle θ in standard position whose terminal arm is in quadrant 4. Example 2: Draw a negative angle θ in standard position whose terminal side is in quadrant 2. Example 3: 5π Using the points provided on the grid below as a guide, sketch the angles 3π 4 and − 4 in standard position. 3) Coterminal Angles Definition: Coterminal angles are standard position angles that share a common _______terminal_arm________________. The two angles that you drew in Example 3 are coterminal angles. Every angle in standard position has an infinite number of coterminal angles associated ° with it. For example, reconsider the standard position angle θ = 3π 4 (135 ) from Example 3. Let P(x,y) be a point on the terminal side of θ. Let’s move the terminal arm of θ counter clockwise one complete rotation about the 3π + 2π = 11π . origin. Thus the new coterminal angle of 3π 4 (In degrees, this 4 will be 4 new coterminal angle will be 135° + 360° = 495°.) Let’s move P another full rotation. The new coterminal angle of 3π 4 will thus be 3π + 2π + 2π = 19π . 4 4 In both cases, P will still have the same coordinates (x, y). In the same manner, the terminal arm of 3π 4 can rotate clockwise about the origin. Let’s move the terminal arm of 3π 4 clockwise one complete rotation about the origin. 3π 5π Thus the new coterminal angle will be 4 − 2π = − 4 . (In degrees, this new coterminal angle will be 135° − 360° = −225°. ) We could also rotate the terminal arm of 3π 4 clockwise one more complete rotation about 3π −13π the origin. Thus, another coterminal angle of θ is 4 − 2⋅ (2π ) = 4 . In both cases, the point P will still have the same coordinates (x, y). Of course, we are not limited to the number of times we can rotate the terminal arm of θ , either clockwise or counter clockwise. Such rotations produce an infinite family of coterminal angles of 3π 4 . Rotating counter clockwise, we generate the following coterminal angles. 3π 3π 19π + 2π + 2π = + (2π ) ⋅ 2 = (2 rotations) 4 4 4 3π Coterminal angles of 4 3π 3π + 2π + 2π + 2π = + (2π ) ⋅ 3 = 27π (3 rotations) 4 4 4 3π 35π 3π + 2π + 2π + 2π + 2π = + (2π )⋅ 4 = (4 rotations) 4 4 4 11π 3π + 2π = (1 rotation) 4 4 Therefore, k complete counter clockwise rotations of the terminal arm of 3π 4 would 3π produce a coterminal angle of 4 + (2π )k radians. . Likewise, rotating clockwise, we generate the following negative coterminal angles. 3π 3π 13π − 2π − 2π = − (2π )⋅ 2 = − (2 rotations) 4 4 4 3π Coterminal angles of 4 3π 3π − 2π − 2π − 2π = − (2π ) ⋅ 3 = − 21π (3 rotations) 4 4 4 3π 29π 3π − 2π − 2π − 2π − 2π = − (2π) ⋅ 4 = − (4 rotations) 4 4 4 π 3π − 2π = − 5 (1 rotation) 4 4 Thus, k complete clockwise rotations of the terminal arm of 3π 4 would produce a negative 3π coterminal angle of 4 − (2π )k radians. . Generalization: In general, consider an angle θ in standard position. Coterminal angles of θ will have the form θ + 2π n radians where n is any integer. (If θ is in degrees, coterminal angles of θ will have the form θ + 360n° where n is any integer.) θ θ − 2π (1) = θ + 2π (−1) θ + 2π(1) θ − 2π (2) = θ + 2π (−2) θ + 2π(2) etc. etc. 4) Reference Angles Definition: Consider an angle θ in standard position. The reference angle of θ is the acute angle formed by the terminal side of θ , and the x–axis. Exercise 1: Sketch the reference angle of each angle θ . 1) 2) 3) 4) Exercise 2: Consider each of the following angles. (a) θ = 45° (b) θ = 5π 6 (e) θ = − 240° (f) θ = − 2π 3 (c) θ = −225° (d) θ = 53π (g) θ = 360° (h) θ = 7 π 4 (i) For each angle, draw the standard position angle. (a) (b) (c) (d) (e) (f) (g) (h) (ii) State which quadrant each angle is in. (a) Quadrant: I (b) Quadrant: II (c) Quadrant: III (d) Quadrant: IV (e) Quadrant: II (f) Quadrant: III (g) Quadrant: I (h) Quadrant: IV (iii) For each angle, find two coterminal angles. (Answers will vary.) (a) (b) (c) (d) (e) (f) (g) (h) (iv) Find the reference angle of each angle. π 6 (a) 45º (b) (e) 60° (f) π 3 π 3 (c) 45º (d) (g) 0° (h) π 4