Department of Mechanical Engineering
University of Engineering & Technology Lahore(KSK Campus).
(Statics & dynamics) LAB DATA
Lab Incharge: Engr. Muhammad Amjad
Lab Assistant: Abbas Ali
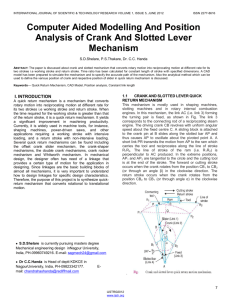
Lay-Out of Engineering Mechanics Lab
DOOR # 1
White Board
DOOR # 2
1
2
29
3
32
28
4
5
27
6
26
31
7
9
10
24
25
11
23
12
13
30
14
16
15
17
22
18
19
21
20
Description of lab lay-out
1. Fly wheel
17.Moment of Inertia
2. Linear and angular speed
18.Warm and Warm wheel
3. Governor’s apparatus
19.Clutch Friction
4. Static and Dynamics Balancing
Materials
20.Friction of Belt
5. Cam and Follower
6. Toggle Joint
7. Funicular polygon of forces
8. Friction Machine
9. Balancing Machine
10.Crank and Slotted Lever
Mechanism
11.Four Bar Chain
12.Ackerman Steering
13.Slotted Link Mechanism
14.Slider Crank Chain
15.Whitworth Quick Return
16.Duplex Screw Jack
21.Gear Train
22.Epicyclic Gear Train
23.Piston Crank
24.Co-efficient of Friction
25.Friction on Horizontal & Inclined
Plane
26.Portal Frame
27.Redundant Truss
28.Roof Truss
29.Force Triangle
30.Screw Efficiency
31.Helical Gear
32.Wheel and Axle
Objective of the Lab
The objective of the lab is to perform experiments which are related to engineering
mechanics subject (Statics and Dynamics) in order to understand the behavior of different
mechanical equipments which students study in theory.
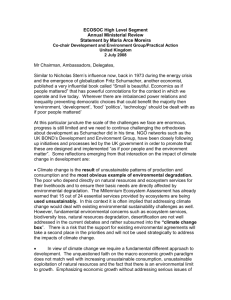
Moment of inertia
Objective:
To investigate the effects of mass,
distribution, radius of gyration and
acceleration on the moment of inertia.
1. To show that as the disc mass
varies so does the acceleration.
2. To determine the radius of gyration
of the two arm boss unit.
3. To determine the effective radius
of gyration of inertia.
4. To show that if the mass is kept constant but its distribution varies then the acceleration
caries.
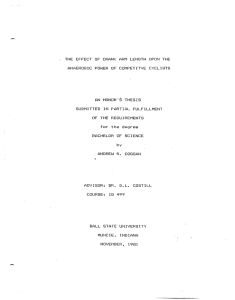
Toggle joint
Objective:
The purpose of this experiment
is to compare the results with the
theoretical values given by a velocity
diagram and to study the variation in the
mechanical advantage as the angle of the
toggle bars changes.
Roof truss
Objective:
Experimentally measure the forces in
a loaded frame and then compare them with
values calculated from theory.
Redundant truss
Objective:
To measure the forces in a truss
before & after redundant member is present.
Fly wheel
Objective:
To determine the moment of inertia
of the fly wheel the friction and windage and
the time taken to come rest.
Portal frame
Objective:
To analyses a given loading
arrangement on portal frames and
compares the results.
Cam & follower
Objective:
1. (a). performance of a tangent cam and roller follower.
(b). comparison of a roller follower and lever roller follower on a tangent cam.
2. Comparison of a range of follower on an eccentric circular cam.
3. (a). comparison of S.H.M and constant acceleration cams with a roller follower.
(b). study of uniform motion cam with a roller follower.
Force triangle
Objective:
1. To show that a system of co-planer
force when in equilibrium have a
closed vector diagram.
2. The resolution of forces and vector
force diagram are often used in
engineering to find a solution may be
difficult or complex due to the
geometry involved.
Linear & Angular Speed
Objective:
To verify the relationship between
angular and linear velocity.
Funicular Polygon Of Forces
Objective:
1. To resolve by experiment any suitable
combination of three static, co-planer forces
and to compare the results with the graphical
solution obtained by drawing a triangle of
force diagram.
2. To study the equilibrium of more than three
concurrent co-planer forces and the associated
polygon of forces.
3. To study of equilibrium of co-planer nonconcurrent forces acting on a body.
Coefficient of Friction
Objective:
To determine the kinetic coefficient
of friction between various metal pairs.
Slider Crank Mechanism
Objective:
1. To obtain a graph of piston
velocity against crank angle using
the method of instantaneous
centers assuming that the crank
rotates with constant angular
velocity.
2. To obtain the crank angles which
correspond to the maximum
piston velocity.
3. To show that for a slider crank chain the piston motion tends to simple harmonic motion
with increasing values of connecting rod\crank
Ackerman Steering
Objective:
To measure wheel angles and
steering arm position and to determine
the turning centre. The effect of toe-out
and toe-in of the may also be shown.
Whitworth Quick Return
Motion
Objective:
To investigate the performance
of a whit worth quick return motion. In
particular the experiment will show that
the motion does have quick return stroke
and slow cutting or forward stroke.
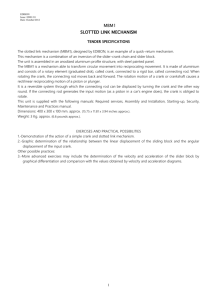
Slotted Link Mechanism
Objective:
To investigate the motion of
slotted link and to see if piston rod
moves with S.H.M.
Four Bar Chain
Objective:
1. To find the cognate linkage.
2. To investigate a four bar linkage.
3. To determine the velocities of the
rocker.
Crank And Slotted Link
Mechanism
Objective:
To investigate the kinematics
motion of a crank and slotted lever quick
return mechanism and evaluate the
increase in efficiency that this would
offer if applied to a machine tool.
 0
0