mathstat.concordia.ca - Department of Mathematics
advertisement

The Annals of Applied Probability
2014, Vol. 24, No. 2, 721–759
DOI: 10.1214/13-AAP934
© Institute of Mathematical Statistics, 2014
CENTRAL LIMIT THEOREMS AND DIFFUSION
APPROXIMATIONS FOR MULTISCALE
MARKOV CHAIN MODELS1
B Y H YE -W ON K ANG , T HOMAS G. K URTZ2
AND
L EA P OPOVIC3
Ohio State University, University of Wisconsin
and Concordia University
Ordinary differential equations obtained as limits of Markov processes
appear in many settings. They may arise by scaling large systems, or by averaging rapidly fluctuating systems, or in systems involving multiple timescales, by a combination of the two. Motivated by models with multiple timescales arising in systems biology, we present a general approach to proving a
central limit theorem capturing the fluctuations of the original model around
the deterministic limit. The central limit theorem provides a method for deriving an appropriate diffusion (Langevin) approximation.
1. Introduction. There are two classical kinds of Gaussian limit theorems
associated with continuous time Markov chains as well as more general Markov
processes. The first of these considers a sequence {XN } of Markov chains that converges to a deterministic function X and gives a limit for the rescaled deviations
U N = rN (X N − X); see, for example, Kurtz (1971), Kurtz (1977/78), van Kampen (1961). The second considers an ergodic Markov process Y with stationary
distribution π and gives a limit for
Nt
√ t 1
h Y (s) ds = N
h Y (Ns) ds
Z N (t) = √
0
N 0
for h satisfying h dπ = 0; see, for example, Bhattacharya (1982) for a general
result of this type.
There are many proofs for theorems like these. In particular, results of both
types can be proved using the martingale central limit theorem (Theorem A.1).
For example, in the first case, there is typically a sequence of functions F N such
that
M N (t) = X N (t) − X N (0) −
t
F N X N (s) ds
0
Received August 2012; revised March 2013.
1 Supported in part by NSF FRG Grant DMS 05-53687.
2 Supported in part by NSF Grant DMS 11-06424.
3 Supported by NSERC Discovery grant.
MSC2010 subject classifications. 60F05, 92C45, 92C37, 80A30, 60F17, 60J27, 60J28, 60J60.
Key words and phrases. Reaction networks, central limit theorem, martingale methods, Markov
chains, scaling limits.
721
722
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
is a martingale, F N → F , Ẋ = F (X) and F N (x N ) − F (x) ≈ ∇F (x)(x N − x), for
x N converging to x. If the martingale central limit theorem gives rN M N ⇒ M and
U N (0) ⇒ U (0), then (ignoring technicalities) U N should converge to the solution
of
U (t) = U (0) + M(t) +
(1.1)
t
0
∇F X(s) U (s) ds.
In the second case, the assumption that h dπ = 0 suggests that there should be
a solution of the Poisson equation Af = −h, where A is the generator for Y , and
then
Nt
1
N
f Y (Nt) − f Y (0) −
Af Y (s) ds
Z (t) = √
0
N
1 − √ f Y (Nt) − f Y (0) .
N
The first term on the right is a martingale and the second should go to zero, so if
the martingale central limit theorem applies to the first, then Z N should converge.
This paper addresses situations of the first type [V0N ⇒ V0 for a deterministic V0 , and we want to verify convergence of U N = rN (V0N − V0 )] in which both
approaches are required. Specifically, the function F N giving the martingale, M N ,
depends not only on V0N but also on another process V1N [think V1N (t) = V1 (Nt)],
so
M
N,1
is a martingale,
(t) = V0N (t) − V0N (0) −
FN
t
0
F N V0N (s), V1N (s) ds
“averages” to F in the sense that
t
N N
F V0 (s), V1N (s) − F V0N (s) ds → 0,
0
(V0N , V1N ) is Markov with generator AN and there exist HN
(F N − F ). [Note that HN will be a vector of functions in
D(AN ).] Assuming that
such that AN HN ≈
the domain of AN ,
M N,2 (t) = HN V0N (t), V1N (t) − HN V0N (0), V1N (0)
−
t
AN HN V0N (s), V1N (s) ds
0
is a martingale, and again ignoring all the technicalities, we have
rN V0N (t) − V0 (t)
= rN V0N (0) − V0 (0) + rN M N,1 (t) − rN M N,2 (t)
(1.2)
+
t
0
rN F V0N (s) − F V0 (s) ds
723
CLT FOR MULTI-SCALE MARKOV CHAINS
+ rN HN V0N (t), V1N (t) − HN V0N (0), V1N (0)
+ rN
t
N N
F V0 (s), V1N (s) − F V0N (s)
0
− AN HN V0N (s), V1N (s) ds.
If the last two terms on the right go to zero, the martingale terms converge,
rN M N,1 − rN M N,2 ⇒ M
and F is smooth, then we again should have U N ⇒ U satisfying (1.1).
The work to be done to obtain theorems of this type is now clear. We need to
identify F N and F , find an approximate solution to the Poisson equation AN HN ≈
F N − F , verify that the martingales satisfy the conditions of the martingale central
limit theorem, and verify that the error terms [the last two terms in (1.2)] converge
to zero. We will make this analysis more specific in stages. We are essentially
considering situations in which the process V1N is evolving on a faster time scale
than V0N and “averages out” to give the convergence of V0N to V0 . But V1N itself
may evolve on more than one time scale. In the first stage of our development, we
will replace V1N by (V1N , V2N ) with V1N and V2N evolving on different (fast) time
scales. Once the analysis for two fast time scales is carried out, the extension of
the general results to more than two fast time scales should be clear. In the second
stage, we consider multiply scaled, continuous-time Markov chains of a type that
arises naturally in models of chemical reaction networks. For these models, many
of the conditions simplify, but the notation becomes more complex.
Outline: In Section 2 we state and prove the functional central limit Theorem 2.11, and specify a sequence of Conditions 2.1–2.10 that need to be verified
for it to apply. In Section 3 we additionally give a diffusion approximation implied by Theorem 2.11. Our aim is to apply these results to Markov chain models
for chemical reactions. In Section 4 we identify specific aspects of the multi-scale
behavior of a reaction network that one needs in order to apply Theorem 2.11 to
the chemical species with a deterministic limit on the slowest time scale. Section 5
provides several examples of chemical networks (the first two evolving on two, the
last one on three time-scales), and shows how to verify the conditions and obtain
a diffusion approximation.
2. A central limit theorem for a system with deterministic limit and three
time scales. We identify a set of conditions on a three time-scale process V N =
(V0N , V1N , V2N ) that guarantee U N = rN (V0N − V0 ) converges to a diffusion. As
suggested earlier, we write U N in the form
U N (t) = U N (0) + rN M N,1 (t) − M N,2 (t)
(2.1)
+ rN
t
N F V0 (s) − F V0 (s) ds
0
724
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
+ rN
t
N N F V (s) − F V N (s) ds
0
t
N F V (s) − F V0N (s) − AN HN V N (s) ds
+ rN
0
+ rN HN V N (t) − HN V N (0) ,
where M N,1 , M N,2 are martingales, V0 is the deterministic limit of the process
V0N , F is its infinitesimal drift and HN is an approximate solution to a Poisson
equation. Our conditions insure each individual term has a well behaved limit.
N
di
We assume that ViN takes values in EN
i ⊂ R , i = 0, 1, 2, and that Ei converges in the sense that there exists Ei ⊂ Rdi such that EN
i ⊂ Ei and for each
d
i
compact K ⊂ R ,
lim
sup
inf |x − y| = 0.
N→∞ x∈Ei ∩K y∈EN
i
We will refer to AN as the “generator” for the process V N = (V0N , V1N , V2N ),
but all we require is that AN is a linear operator on some space D(AN ) of measurN
N
able functions on EN ≡ EN
0 × E1 × E2 and that for h ∈ D (AN ),
h V N (t) − h V N (0) −
t
0
AN h V N (s) ds
is a local martingale.
We first identify the time scales of the process V N with two sequences of positive numbers {r1,N }, {r2,N }, and introduce a sequence of scaling parameters {rN }
for U N with the following properties.
C ONDITION 2.1 (Scaling parameters). The scaling parameters rN → ∞ and
{r1,N }, {r2,N } are sequences of positive numbers satisfying
rN
= 0,
N→∞ r1,N
r1,N
lim
= 0.
N→∞ r2,N
lim
(2.2)
We next identify the “generators” for the effective dynamics of V0N , V1N and V2N
on time scales t, tr1,N , and tr2,N , respectively. L0 , L1 , L2 will be linear operators
defined on sufficiently large domains, D(L0 ) ⊂ M(E0 ), D(L1 ) ⊂ M(E0 × E1 ) and
D(L2 ) ⊂ M(E0 × E1 × E2 ), and taking values in M(E0 × E1 × E2 ). The requirements that determine what is meant by “sufficiently large” will become clear, but
we will assume that the domains contain all C ∞ functions having compact support
in the appropriate space. We will use the notation E = E0 × E1 × E2 .
725
CLT FOR MULTI-SCALE MARKOV CHAINS
C ONDITION 2.2 (Multiscale convergence).
Rd0 +d1 +d2 ,
lim
For each compact K ⊂
sup AN h(v) − L0 h(v) = 0,
N→∞ v∈K∩EN
h ∈ D(L0 ),
1
sup AN h(v) − L1 h(v) = 0,
N→∞ v∈K∩EN r1,N
h ∈ D(L1 )
lim
and
1
sup AN h(v) − L2 h(v) = 0, h ∈ D(L2 ).
r
lim
N→∞ v∈K∩EN
2,N
R EMARK 2.3. Similar conditions are considered in Ethier and Nagylaki
(1980). See also Ethier and Kurtz (1986), Section 1.7. There may be only two
time-scales, in which case d2 = 0, L2 h = 0 and E = E0 × E1 (equivalently, E2
consists of a single point) in what follows.
The next condition ensures the uniqueness of the conditional equilibrium distributions of the fast components V2N and V1N , whose “generators” are L2 and L1 .
For each (v0 , v1 ) ∈ E0 ×E1 , there exC ONDITION 2.4 (Averaging condition).
ists a unique μv0 ,v1 ∈ P (E2 ) such that L2 h(v0 , v1 , v2 )μv0 ,v1 (dv2 ) = 0 for every
h ∈ D (L2 ) ∩ B(E). For each v0 ∈ E0 , there exists a unique μv0 ∈ P (E1 ) such that
L1 h(v0 , v1 , v2 )μv0 ,v1 (dv2 )μv0 (dv1 ) = 0 for every h ∈ D(L1 ) ∩ B(E0 × E1 ).
With this condition in mind, we define
L1 h(v0 , v1 ) =
L1 h(v0 , v1 , v2 )μv0 ,v1 (dv2 ).
Our first convergence condition insures that the slow component V0N has a
deterministic limit. Essentially it implies that its “generator” L0 h = F · ∇h, for
h ∈ Cc∞ (E0 ). It also identifies the intrinsic fluctuations of the slow component via
a martingale M N,1 . For an Rd0 -valued process Y , we use [Y ]t to denote the matrix
of covariations [Yi , Yj ]t .
C ONDITION 2.5 (First convergence condition).
and F, G0 ∈ C(E, Rd0 ) such that
Rd0 )
(2.3)
M N,1 (t) = V0N (t) − V0N (0) −
is a local martingale,
(2.4)
lim
[V0N ]t
t
There exist F N ∈ M(EN ,
F N V N (s) ds
0
⇒ 0, and for each compact K ⊂ E,
sup rN F N (v) − F (v) − G0 (v) = 0.
N→∞ v∈K∩EN
726
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
We next turn to the relevant Poisson equations based on the conditional equilibrium distributions of the fast components and the limiting drift of the slow component. Suppose that there exist h1 ∈ D(L1 )d0 and h2 , h3 ∈ D(L2 )d0 such that
L1 h1 (v0 , v1 ) =
F (v0 , v1 , v2 )μv0 ,v1 (dv2 )
−
F (v0 , v1 , v2 )μv0 ,v1 (dv2 )μv0 (dv1 ),
(2.5)
L2 h2 (v0 , v1 , v2 ) = F (v0 , v1 , v2 ) −
F (v0 , v1 , v2 )μv0 ,v1 (dv2 ),
L2 h3 (v0 , v1 , v2 ) = L1 h1 (v0 , v1 ) − L1 h1 (v0 , v1 , v2 ).
Define
F 1 (v0 , v1 ) =
F (v0 ) =
F (v0 , v1 , v2 )μv0 ,v1 (dv2 ),
F (v0 , v1 , v2 )μv0 ,v1 (dv2 )μv0 (dv1 )
and
HN =
(2.6)
1
r1,N
h1 +
1
r2,N
(h2 + h3 ).
Note that for HN of this form
AN HN ≈ L1 h1 + L2 (h2 + h3 ) = F − F .
In what follows, HN does not have to be given by (2.6). That form simply suggests
the possibility of finding HN with the desired properties. Specifically, we assume
the existence of HN ∈ D(AN ) satisfying the following convergence condition.
C ONDITION 2.6 (Second convergence condition).
G1 ∈ C(E, Rd0 ) such that for each compact K ⊂ E,
(2.7)
lim
Assume that there exists
sup rN F (v) − F (v0 ) − AN HN (v) − G1 (v) = 0.
N→∞ v∈K∩EN
R EMARK 2.7. The critical requirements for HN are (2.7), (2.10) and (2.11).
In fact, because of the possibility of large fluctuations by V1N and V2N , even if h1 ,
h2 and h3 satisfying Condition 2.5 can be found, it may be necessary to define HN
using a sequence of truncations of h1 , h2 and h3 .
This now identifies the fluctuations of the slow component due to convergence of
the fast components to their conditional equilibrium distributions via a martingale
M N,2 . For V0 (0) ∈ Rd0 , let V0 satisfy
(2.8)
V0 (t) = V0 (0) +
t
0
F V0 (s) ds,
727
CLT FOR MULTI-SCALE MARKOV CHAINS
and define
M N,2 (t) = HN V N (t) − HN V N (0) −
t
0
AN HN V N (s) ds.
The following condition is then needed for application of the martingale central
limit theorem, Theorem A.1, to the process M N,1 − M N,2 , composed of M N,2
above and M N,1 from (2.3). Essentially it says that the jumps of both the slow
component and solutions to the Poisson equations are appropriately small, and
that the quadratic variation of M N,1 − M N,2 converges.
There exists G ∈ C(E,
C ONDITION 2.8 (Converegence of covariation).
Md0 ×d0 ) such that for each t > 0,
(2.9)
lim E sup rN V0N (s) − V0N (s−) = 0,
N→∞
s≤t
sup rN HN V N (s) ⇒ 0
(2.10)
s≤t
and
(2.11)
(rN )2 V0N − HN ◦ V N t −
t
0
G V N (s) ds ⇒ 0.
We can now account for all the terms in the expansion (2.1) of U N = rN (V0N −
V0 ),
U N (t) = U N (0) + rN M N,1 (t) − M N,2 (t)
t
N + rN
F V0 (s) − F V0 (s) ds
0
+ rN
t
0
F N V N (s) − F V N (s) ds
t
N F V (s) − F V0N (s) − AN HN V N (s) ds
+ rN
0
+ rN HN V N (t) − HN V N (0) .
Conditions 2.1–2.8 insure that all the terms will have a limit as N → ∞. The limit
of the second term on the right is guaranteed by (2.9), (2.10) and (2.11) in Condi2.8. Assuming that F is smooth, the third term on the right is asymptotic to
tion
t
∇F
(V0 (s)) · U N (s) ds. The fourth term is controlled by (2.4) of Condition 2.5,
0
the fifth by (2.7) of Condition 2.6. The order of time scale parameters (2.2) from
Condition 2.1 and the form of HN in (2.6) suggests that the sixth term goes to zero,
but we will explicitly assume that in the statement of the theorem.
Finally, we now only need a condition to ensure relative compactness of the
sequence. If E is unbounded, let ψ : E → [1, ∞) be locally bounded and satisfy
728
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
limv→∞ ψ(v) = ∞, or let ψ : E → [1, ∞) be such that ∀M < ∞, {v ∈ E : ψ(v) ≤
M} is relatively compact in E, and let Dψ denote the collection of continuous
functions f satisfying
|f (v)|
< ∞,
v∈E ψ(v)
|f (v)|
= 0.
k→∞ v∈E,|v|>k ψ(v)
lim
sup
sup
For sequences of space–time random measures, the notion of convergence that
we will use is that discussed in Kurtz (1992).
L EMMA 2.9. Let V N be a sequence of E-valued processes, and define the
occupation measure
N D × [0, t] =
(2.12)
Suppose that for each t > 0
(2.13)
t
sup E
0
N
t
0
1D V N (s) ds.
ψ V N (s) ds < ∞.
Then {N } is relatvely compact, and if N ⇒ , then for f1 , . . . , fm ∈ Dψ ,
·
0
f1 V N (s) ds, . . . ,
⇒
E
·
0
fm V N (s) ds
f1 (v) dv × [0, ·] , . . . ,
E
fm (v) dv × [0, ·]
in CRm [0, ∞).
P ROOF. Relative compactness of {N } follows from Lemma 1.3 of Kurtz
(1992). Relative compactness in CRm [0, ∞) follows from relative
compactness of
each component. To see that for f ∈ Dψ , the sequence X N = 0· f (V N (s)) ds is
relatively compact, it is enough to approximate the sequence by sequences known
to be relatively compact. For ε > 0, there exists a compact Kε ⊂ E and C > 0, such
that |f | ≤ (C1Kε + ε)ψ. Define XεN = 0· 1Kε (V N (s))f (V N (s)) ds. Note that XεN
is Lipschitz with Lipschitz constant supv∈Kε |f (v)|, so {XεN } is relatively compact.
For δ > 0,
t
ε
ψ V N (s) ds ,
sup P supX N (s) − XεN (s) ≥ δ ≤ sup E
δ N
0
s≤t
N
and relative compactness of {XN } follows; see Problem 3.11.18 of Ethier and
Kurtz (1986).
Assuming that N ⇒ , the convergence of 0· f (V N (s)) ds to E×[0,·] f (v) ×
(dv × ds) follows by the same type of approximation. The final condition insures relative compactness of V N .
729
CLT FOR MULTI-SCALE MARKOV CHAINS
C ONDITION 2.10 (Tightness). If E is unbounded, there exists a locally
bounded ψ : E → [1, ∞) satisfying limv→∞ ψ(v) = ∞ such that for each t > 0,
t
sup E
(2.14)
0
N
N ψ V (s) ds < ∞
and all of the following functions are in Dψ : supN |F N |, supN |rN (F N −
F )|, supN |rN (F − F − AN HN )|, |G|, supN |AN h| for h ∈ D(L0 ) ∩ B(E0 ),
1
1
AN h| for h ∈ D(L1 ) ∩ B(E0 × E1 ), and supN | r2,N
AN h| for h ∈
supN | r1,N
D(L2 ) ∩ B(E).
Assuming the above conditions and defining
(2.15)
G(v0 ) =
G(v0 , v1 , v2 )μv0 ,v1 (dv2 )μv0 (dv1 ),
and similarly for G0 and G1 , we have the following functional central limit theorem.
T HEOREM
2.11. Under the above conditions, suppose that
N
limN→∞ U (0) = U (0), that F is continuously differentiable and that the solution (necessarily unique) of (2.8) exists for all time. Then for each t > 0,
supV0N (s) − V0 (s) ⇒ 0,
s≤t
rN (M N,1 − M N,2 ) ⇒ M, where M has Gaussian, mean-zero, independent increments with
E M(t)M (t) =
(2.16)
T
t
0
G V0 (s) ds,
and U N ⇒ U satisfying
U (t) = U (0) + M(t) +
Assuming
G = σσT ,
+
0
∇F V0 (s) U (s) + G0 V0 (s) + G1 V0 (s) ds.
we can write
U (t) = U (0) +
(2.17)
t
t
0
t
0
σ V0 (s) dW (s)
∇F V0 (s) U (s) + G0 V0 (s) + G1 V0 (s) ds.
R EMARK 2.12. As noted above, the corresponding theorem for systems with
two time-scales is obtained by assuming E2 consists of a single point so L2 f ≡ 0.
730
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
P ROOF OF T HEOREM 2.11. Let N be the occupation measure defined as
in (2.12). Then by Lemma 2.9, {N } is relatively compact. Assume, for simplicity
that N ⇒ . We will show that is uniquely determined.
Condition 2.5, equation (2.9) and the martingale central limit theorem, Theorem A.1, imply M N,1 ⇒ 0, and Lemma 2.9 then implies V0N ⇒ V0∞ , where
V0∞ (t) = V0 (0) +
(2.18)
E×[0,t]
F (v)(dv × ds).
Condition 2.10, the definition of L2 , and Lemma 2.9 imply
t
N N
N h V (t) − h V (0) −
AN h V (s) ds
r 2,N
0
1
⇒
E×[0,t]
L2 h(v)(dv × ds)
for every h ∈ Cc∞ (E). The uniform integrability implied by (2.14) implies that the
limit is a continuous martingale with sample paths of finite variation and hence is
identically zero. Condition 2.4 then implies [see Example 2.3 of Kurtz (1992)] that
can be written
(dv × ds) = μv0 ,v1 (dv2 ) 0,1 (dv0 × dv1 × ds).
A similar argument gives
0=
=
E×[0,t]
L1 h(v)(dv × ds)
E0 ×E1 ×[0,t]
L1 h(v0 , v1 ) 0,1 (dv0 × dv1 × ds),
which implies
0,1 (dv0 × dv1 × ds) = μv0 (dv1 ) 0 (dv0 × ds).
But the convergence of V0N to V0∞ implies 0 (dv0 × ds) = δV0∞ (s) (dv0 ) ds.
Now (2.18) can be rewritten
V0∞ (t) = V0 (0) +
(2.19)
t
0
F V0∞ (s) ds,
V0∞
= V0 .
and it follows that
Similarly, (2.11) now becomes
2
(rN )
V0N
(M N,1
− HN ◦ V
N
t
⇒
− M N,2 ) ⇒ M
t
0
G V0 (s) ds,
as desired.
and it follows that rN
Finally, the uniform integrability implied by (2.14) and Condition 2.10 allows
interchange of limits and integrals in the expansion of U N given in (2.1), and the
convergence of U N to U follows. 731
CLT FOR MULTI-SCALE MARKOV CHAINS
3. Diffusion approximation. The functional central limit theorem, Theorem 2.11, suggests approximating V0N by V0 + r1N U . In turn, that observation
and (2.17) suggest approximating V0N by a diffusion process given by the Itô equation
1 t N σ D (s) dW (s)
D N (t) = V0N (0) +
rN 0
(3.1)
t
1
1
+
F D N (s) + G0 D N (s) + G1 D N (s) ds.
rN
rN
0
The approximation
N ≡ V0 +
V0N ≈ D
1
U
rN
is, of course, justified by Theorem 2.11. Justification for the approximation V0N ≈
D N is less clear, since D N is not produced as a limit. Noting, however, that
N (t) = V N (0) +
D
0
+
t
0
1
rN
t
0
σ V0 (s) dW (s)
F V0 (s) +
1
1
∇F V0 (s) U (s) + G0 V0 (s)
rN
rN
1
+ G1 V0 (s) ds,
rN
N ) converges to
assuming smoothness of F , G0 and G1 , we see that rN2 (D N − D
satisfying
U
(t) =
U
t
0
+
∇σ V0 (s) U (s) dW (s)
t
0
(s) + 1 U T (s)∂ 2 F V0 (s) U (s)
∇F V0 (s) U
2
+ ∇G0 V0 (s) + ∇G1 V0 (s) U (s) ds,
and since the central limit theorem demonstrates that the fluctuations of V N are of
order O(rN−1 ), we see that the difference between the two approximations D N and
N is negligible compared to these fluctuations.
D
4. Markov chain models for chemical reactions. A reaction network is a
chemical system involving multiple reactions and chemical species. The kind of
stochastic model for a network that we will consider treats the system as a continuous time Markov chain whose state X is a vector giving the number of molecules
Xi of each species of type i ∈ I present. Each reaction is modeled as a possible
732
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
transition for the state. The model for the kth reaction, for each k ∈ K, is determined by a vector of inputs νk specifying the numbers of molecules of each chemical species that are consumed in the reaction, a vector of outputs νk specifying
the numbers of molecules of each species that are produced in the reaction, and
a function of the state λk (x) that gives the rate at which the reaction occurs as a
function of the state. Specifically, if the kth reaction occurs at time t, the change
in X is a vector of integer values ζk = νk − νk .
Let Rk (t) denote the number of times that the kth reaction occurs by time t.
Then Rk is a counting process with intensity λk (X(t)) (called the propensity in the
chemical literature) and can be written as
Rk (t) = Yk
t
0
λk X(s) ds ,
where the Yk are independent unit Poisson processes. The state of the system at
time t can be written as
X(t) = X(0) +
ζk Rk (t) = X(0) +
k
k
t
ζk Yk
0
λk X(s) ds .
In the stochastic version of the law of mass action, the rate function is proportional to the number of ways of selecting the molecules that are consumed in the
reaction, that is,
λk (x) = κk
νik !
i
xi i
νik
= κk
xi (xi − 1) · · · (xi − νik + 1).
i
Of course, physically, |νk | = i νik is usually assumed to be less than or equal to
two, but that does not play a significant role in the analysis that follows.
A reaction network may exhibit behavior on multiple scales due to the fact
that some species may be present in much greater abundance than others, and
the rate functions may vary over several orders of magnitude. Following Kang
and Kurtz (2013), we embed the model of interest in a sequence of models indexed by a scaling parameter N . The model of interest corresponds to a particular
value of the scaling parameter N0 . For each species i ∈ I = {1, . . . , s}, we specify a parameter αi ≥ 0 and normalize the number of molecules by N0αi defining
N
Zi 0 (t) = N0−αi Xi (t) so that it is of O(1). For each reaction k ∈ K, we specify
β
another parameter βk and normalize the reaction rate constant as κk = κk N0 k so
that κk is of O(1). One can observe this model on different time scales as well, by
γ
replacing t by tN0 , for some γ ∈ R. The model then becomes a Markov chain on
EN0 = N0−α1 Z+ × · · · × N0−αs Z+ which, when N = N0 , evolves according to
ZiN (t) = ZiN (0) +
k
N
−αi
t
ζik Yk
0
N N νk ·α+βk +γ λN
k Z (s) ds
733
CLT FOR MULTI-SCALE MARKOV CHAINS
with
λN
k (z) = κk
zi zi − N −αi · · · zi − (νik − 1)N −αi .
i
If for some i, αi > 0 and νik > 1, then λN
k varies with N but converges as N → ∞.
To simplify notation, we will write λk (z) rather than λN
k , but one should check
that the N -dependence is indeed negligible in the analysis that we do. Defining
N = diag(N −α1 , . . . , N −αs ), so Z N = N X, let
AN f (z) =
N ρk λk (z) f (z + N ζk ) − f (z) ,
k
where ρk = νk · α + βk + γ . Since the change of time variable from t to tN γ is
equivalent to scaling the generator by a factor of N γ , we initially take γ to be zero.
We subsequently consider the behaviour of Z N on different time-scales Z N (·N γ ).
To be precise regarding the domain of AN , note that because the jumps of Z N
are uniformly bounded, if we define τrN = inf{t : |Z N (t)| ≥ r}, then for every continuous function f ,
f Z N t ∧ τrN
− f Z N (0) −
t∧τ N
r
0
AN f Z N (s) ds
is a martingale.
For notational simplicity, assume that the αi satisfy 0 ≤ α1 ≤ · · · ≤ αs , and let
d◦ ≥ 0 satisfy αi = 0, i ≤ d◦ and αi > 0, i > d◦ .
To apply the results of Section 2, we identify rN , r1,N , r2,N from the reaction
network and the parameters {αi }, {βk } as follows. Let
m2 = max{ρk − αi : ζik = 0},
and define r2,N = N m2 . Then there exists a linear operator L2 such that for each
compact K ⊂ Rs ,
lim
1
sup AN h(z) − L2 h(z) = 0,
r
N→∞ z∈K∩EN
2,N
h ∈ D(L2 ) = C 1 Rs .
Depending on the relationship between ρk and αi for ζik = 0 and the time-scale
parameter γ , the limiting operator L2 is either the generator for a Markov chain,
a differential operator, or a combination of the two, which would be the generator
for a piecewise deterministic Markov process (PDMP). We classify the reactions
by defining
K2,◦ = {k ∈ K : ρk = m2 }
and
K2,• = {k ∈ K : ρk − αi = m2 for some i with αi > 0, ζik = 0}.
734
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
For each k ∈ K2,◦ ∪ K2,• define
ζ2,k = lim N ρk −m2 N ζk ∈ Z.
N→∞
Note that throughout the paper ζ2,k will denote the limiting reaction vector, not to
be confused with the single matrix entry ζik . Then, for h ∈ C 1 (Rs )
(4.1) L2 h(z) =
λk (z) h(z + ζ2,k ) − h(z) +
k∈K2,◦
λk (z)∇h(z) · ζ2,k .
k∈K2,•
Note that, although λk (z) depends on all species types, the dynamics defined by L2
makes changes only due to reactions K2,◦ ∪ K2,• . In other words, only the subnetwork defined by reactions K2,◦ ∪ K2,• is relevant on the time-scale corresponding
to γ = −m2 . If K2,• is empty, the process corresponding to L2 is a Markov chain,
and if K2,◦ is empty, the process is just the solution of an ordinary differential
equation. If both are nonempty, the process is piecewise deterministic in the sense
of Davis (1993).
The process corresponding to L2 can be obtained as the solution of
V2 (t) = V2 (0) +
t
ζ2,k Yk
k∈K2,◦
0
λk V2 (s) ds +
t
ζ2,k
k∈K2,•
0
λk V2 (s) ds,
and assuming that V2 does not hit infinity in finite time, Z N (·N −m2 ) ⇒ V2 .
The central limit theorem in Section 2 assumes that the state space is a product
space and that the fast process “averages out” one component. The state space
on which functions in the domain of L1 in Condition 2.2 are defined is such that
every function on it is contained in the kernal of L2 . In order to separate the state
space in this way, we need to identify the combinations of species variables whose
change on the fastest time-scale γ = −m2 is less than O(1). This can be done with
a change of basis of the original state space as follows.
Let SK be a matrix whose columns are ζk , k ∈ K for some subset K ⊂ K. Then
SK is the stoichiometric matrix associated with the reaction subnetwork K. For
the species types whose behavior is discrete, SK gives the possible jumps, while
for the species whose behavior evolves continuously, SK determines the possible
paths. We will let R(SK ) = span{ζk , k ∈ K} ⊂ Rs denote the range of SK , called
the stoichiometric subspace of the chemical reaction subnetwork K, and we will
let
T
s
N SK = θ ∈ R :
θi ζik = 0 ∀k ∈ K
i∈I
denote the null space of
which is the othogonal complement of R(SK ). For
each initial value z0 of the reaction system, z0 + R(SK ) defines the stoichiometric
compatibility class of the system. Then both stochastically and deterministically
evolving components of the system must remain in the stoichiometric compatibility class for all time t > 0. The linear combinations of the species θ · X for
T
SK
735
CLT FOR MULTI-SCALE MARKOV CHAINS
T ) are conserved quantities; that is, they are constant along the trajectoθ ∈ N (SK
ries of the evolution of the reaction subnetwork K.
On the time scale γ = −m2 , the fast subnetwork determined by L2 has the
stoichiometric matrix S2 whose columns are {ζ2,k , k ∈ K2,◦ ∪ K2,• }. Define N (S2T )
as above, and note that θ · V2 , θ ∈ N (S2T ), are conserved quantities for the fast
subnetwork, that is, θ · V2 (t) does not depend on t. Let s2 denote the dimension of
R(S2 ), and s1 = s − s2 be the dimension of N (S2T ). We now replace the natural
state space of the process by N (S2T ) × R(S2 ), mapping the original processes onto
this product space by the orthogonal projection N (S T ) × R(S2 ) , that is,
2
N
V1 (t), V2N (t) = N (S T ) Z N (t), R(S2 ) Z N (t) .
2
Note that the original coordinates have different underlying state spaces N −αi Z;
however, the change of basis will combine only those coordinates with the same
scaling parameter αi . To see that this is the case, note that by the definition of ζ2,k ,
ζ2,ik = 0 and ζ2,j k = 0 implies αi = αj . It follows that there is a basis θ1 , . . . , θs1
for N (S2T ) such that θil = 0 and θj l = 0 implies αi = αj , and we can take this
basis to be orthonormal. We denote the common scaling parameter by αθl . Let 1
be the matrix with rows θ1T , . . . , θsT so that (1 z)T = (θ1 · z, . . . , θs1 · z)T and the
1
orthogonal projection is given by
N (S T ) = T1 1 =
2
s1
θl θlT .
l=1
On the next time scale we only need to consider the dynamics of the projection of the original process that is unaffected by the fast subnetwork V1N =
N (S T ) N X. Since N (S T ) N = N N (S T ) , we have
2
2
2
V1N (t) = N (S T ) Z N (0) + N
2
k
N (S T ) ζk Yk N ρk
2
t
0
N
λN
k Z (s) ds .
Note that R(S2 ) ζk is not necessarily equal to ζ2,k , nor is the other projection
N (S T ) ζk = ζk − R(S2 ) ζk necessarily equal to ζk − ζ2,k . To identify the next time
2
scale let
m1 = max{ρk − αθl : θl · ζk = 0} = max ρk − αi : (N (S T ) ζk )i = 0 ,
2
and define r1,N = N m1 . Note that m1 < m2 . Then there exists a linear operator L1
such that for each compact K ⊂ Rs1 ,
(4.2)
1
sup AN h(z) − L1 h(z) = 0,
N→∞ z∈K∩EN r1,N
lim
736
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
where h ∈ D(L1 ) satisfies h(z) = f (θ1 · z, . . . , θs1 · z) for f ∈ C 1 (Rs1 ). Define
K1,◦ = k ∈ K : ρk = m1 , max |θl · ζk | > 0
l
and
K1,• = {k ∈ K : ρk − αθl = m1 for some l with αθl > 0, θl · ζk = 0}.
−αθ1
1
,...,N
Let N = diag(N
−αθ
s1
), and for each k ∈ K1,◦ ∪ K1,• define
θ
ρk −m1
1
= lim N ρk −m1 N −αθ1 θ1 ·ζk , . . . , N
ζ1,k
N 1 ζk = lim N
N→∞
N→∞
−αθ
s1
θs1 ·ζk
T
.
Then for h(z) = f (1 z) with f ∈ C 1 (Rs1 )
L1 h(z) =
θ
λk (z) f 1 z + ζ1,k
− f (1 z) +
k∈K1,◦
θ
λk (z)∇f (1 z) · ζ1,k
.
k∈K1,•
If V1 denotes the process corresponding to L1 , then assuming that V1 does not hit
infinity in finite time, V1N (·N −m1 ) = N (S T ) Z N (·N −m1 ) ⇒ V1 .
2
To separate the state space in terms of the next time scale (if there is one), define
ζ1,k = lim N ρk −m1 N N (S T ) ζk .
N→∞
2
θ is embedded in the original space, and ζ θ = ζ 1 .
In other words, ζ1,k = T1 ζ1,k
1 k
1,k
On the time scale γ = −m1 , the subnetwork determined by L1 has the stoichiometric matrix S1 with columns {ζ1,k k ∈ K1,◦ ∪ K1,• }. Define the subspace N (S1T )
as before, and let s1 denote the dimension of R(S1 ) and s0 = s1 − s1 be the dimension of N (S1T ). As before we need to map the processes V1N onto this product space by the orthogonal projection N (S T ) × R(S1 ) . Since ζ1,k ∈ N (S2T ) =
1
span(θ1 , . . . , θs1 ), we can assume that the θl are selected so that
R(S1 ) = span(θs0 +1 , . . . , θs1 ) = span(ζ1,1 , . . . , ζ1,s1 ).
Define
0 =
s0
l=1
θl θlT
= N (S T ) ,
1
1 =
s1
l=s0 +1
θl θlT = R(S1 )
and
2 = R(S2 ) .
On the next time scale we need only consider the projection 0 Z N of the original process which is unaffected by either of the faster subnetworks. To identify the
next time scale, let
m0 = max{ρk − αθl : θl · ζk = 0, 1 ≤ l ≤ s0 } = max ρk − αi : (0 ζk )i = 0 ,
and define r0,N = N m0 . Note that if 1 ≤ s2 , 1 ≤ s1 , 1 ≤ s0 (s0 + s1 + s2 = s), m0 <
m1 < m2 . Without loss of generality, we can assume that time is scaled so that
737
CLT FOR MULTI-SCALE MARKOV CHAINS
m0 = 0. Then, there exists a linear operator L0 such that for each compact K ⊂
R s0 ,
sup AN h(z) − L0 h(z) = 0,
lim
N→∞ z∈K∩EN
where h ∈ D(L0 ) satisfies h(z) = f (θ1 · z, . . . , θs0 · z) for f ∈ C 1 (Rs0 ). Define
K0,◦ = k ∈ K : ρk = 0, max |θl · ζk | > 0
l
and
K0,• = {k ∈ K : ρk − αθl = 0 for some l with αθl > 0, θl · ζk = 0, 1 ≤ l ≤ s0 }.
As before, let 0 be the matrix with rows θ1T , . . . , θsT0 , and let N 0 = diag(N −αθ1 ,
−α
. . . , N θs0 ), so that 0 = N (S T ) = T0 0 and for each k ∈ K0,◦ ∪ K0,• define
1
ζkθ,0 = lim N ρk N 0 0 ζk = lim N ρk N −αθ1 θ1 · ζk , . . . , N
N→∞
N→∞
For h(z) = f (0 z) with f ∈ C 1 (Rs0 )
L0 h(z) =
k∈K0,◦
λk (z) f 0 z + ζkθ,0 − f (0 z) +
k∈K0,•
−αθs
0
θ s0 · ζ k
T
.
λk (z)∇f (0 z) · ζkθ,0 .
To relate the above calculations to the results of Section 2, we assume that K0,◦ =
∅ so that
L0 h(z) =
k∈K0,•
λk (z)∇f (0 z) · ζkθ,0 .
Let V N = T Z N ≡ (0 Z N , 1 Z N , 2 Z N ), so V N = (V0N , V1N , V2N ) ∈
N (S1T ) × R(S1 ) × R(S2 ), and note that T is invertible so that the intensities can
be written as functions of v ∈ N (S1T ) × R(S1 ) × R(S2 ), that is, λk (T −1 v). Since
s
s 0
1
0 z = l=1
(θl · z)θl and 1 z = l=s
(θ · z)θl , the process V0N = 0 Z N is
0 +1 l
N
the embedding of 0 Z N , and similarly (V0N , V1N ) = (0 Z N , N
1 Z ) is just the
N
embedding of 1 Z . Let E0 , E1 , and E2 denote the limit of the state spaces for
V0N , V1N and V2N .
The function F N in (2.3) is given by
(4.3)
F N (v) =
N ρk N 0 λk T −1 v 0 ζk
k
and
F (v) = lim F N (v) =
N→∞
k∈K0,•
λk T −1 v ζkθ,0 .
738
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
To satisfy Condition 2.4 we will assume that L2 is such that for each (v0 , v1 ) ∈
E0 × E1 there exists a unique conditional
equilibrium distribution μv0 ,v1 (dv2 ) ∈
P (E2 ) for L2 . Then L1 h(v0 , v1 ) = L1 h(v0 , v1 , u2 )μv0 ,v1 (du2 ) is
L1 h(v0 , v1 ) =
θ
λk (v0 , v1 ) f (v0 , v1 ) + ζ1,k
− f (v0 , v1 )
k∈K1,◦
(4.4)
+
θ
λk (v0 , v1 )∇f (v0 , v1 ) · ζ1,k
,
k∈K1,•
where λk (v0 , v1 ) = λk (T −1 (v0 , v1 , v2 ))μv0 ,v1 (dv2 ). For Condition 2.4 to be met,
we also need to assume that for each v0 ∈ E0 there exists a unique conditional
equilibrium distribution μv0 (dv1 ) ∈ P (E1 ) for L1 .
We further need to assume that there are functions h1 ∈ D(L1 ) : E0 × E1 →
R|E0 | and h2 , h3 ∈ D(L2 ) : E → R|E0 | that solve the following Poisson equations:
L1 h1 = F 1 − F ,
where
F 1 (v0 , v1 ) =
L2 h2 = F − F 1 ,
L2 h3 = L1 h1 − L1 h1 ,
F (v0 ) =
F (v0 , v1 , u2 )μv0 ,v1 (du2 ),
F 1 (v0 , u1 )μv0 (du1 )
in order for Condition 2.6 to be met. We refer the reader to Glynn and Meyn (1996)
for results on sufficient conditions for the existence of solutions to a Poisson equation for a general class of Markov processes. For the class of general piecewise
deterministic processes see also Costa and Dufour (2003). For the examples considered in Section 5, we were able to explicitly compute the desired functions. In
general, however, explicit computation may not be possible, so results that ensure
the existence of these functions may be useful.
We now need to identify rN , which will be of the form rN = N p , for some
0 < p < m1 . Assuming that there is no cancellation among the terms in the sum
in (4.3), for (2.4) to hold, we must have
(4.5)
p ≤ max{αθl − ρk : θl · ζk = 0, ρk < αθl , 1 ≤ l ≤ s0 }.
Then
θl · G0 (v) = lim rN θl · F N (v) − F (v) =
N→∞
λk T −1 v θl · ζk
k : αθl −ρk =p
and
G0 (v) =
s0
λk T −1 v θl · ζk θl .
l=1 k:αθl −ρk =p
−1
−1
h1 + r2,N
(h2 + h3 ). To ensure that the limit in (2.7) exists,
Now let H N = r1,N
with reference to the definition of L2 , we must have
(4.6)
p ≤ min{αi + m2 − ρk : ζik = 0, αi + m2 − ρk > 0}
739
CLT FOR MULTI-SCALE MARKOV CHAINS
and
p ≤ min{2αi + m2 − ρk : ζik = 0, αi > 0},
(4.7)
and with reference to the definition of L1 , we must have
p ≤ min{αθl + m1 − ρk : θl · ζk = 0, αθl + m1 − ρk > 0}
(4.8)
and
p ≤ min{2αθl + m1 − ρk : θl · ζk = 0, αθl > 0}.
(4.9)
Note that (4.5) implies the minimum in (4.8) and (4.9) only needs to be taken over
s0 + 1 ≤ l ≤ s1 .
Assuming that h1 , h2 and h3 are sufficiently smooth, these assumptions insure
that there exists G1 : E → R|E0 |
G1 (v) = lim
N→∞
rN
AN
AN
− L2 (h2 + h3 ) + rN
− L1 h1
r2,N
r1,N
= G12 (v) + G11 (v).
To identify G12 , define
ζ2,k = lim N p N ρk −m2 N ζk − ζ2,k ,
N→∞
ξ2,kij = lim N p+ρk −m2 −αi −αj ζik ζkj
N→∞
and
p
K2,◦ = {k ∈ K : θl · ζk = 0 for some l with αθl = 0, m2 − ρk = p},
p
K2,• = {k ∈ K \ K2,• : θl · ζk = 0 for some l with αθl > 0, m2 − ρk + αθl = p}.
Then setting h(z) = h2 (T z) + h3 (T z), G12 (v) = H12 (T −1 v), where
H12 (z) =
λk (z)∇h(z + ζ2,k ) · ζ2,k +
k∈K2,◦
+
λk (z)∇h(z) · ζ2,k
p
k∈K2,• ∪K2,•
λk (z)
k∈K2,•
1
∂zi ∂zj h(z)
ξ2,kij +
λk (z) h(z + ζ2,k ) − h(z) .
2 ij
p
k∈K2,◦
Similarly, to identify G11 , define
θ
θ 1
ζ1,k
= lim N p N ρk −m1 N 1 ζk − ζ1,k ,
N→∞
θ
ξ1,kll
= lim N
N→∞
p+ρk −m1 −αθl −αθ θ
θ
l ζ
1,kl ζ1,kl 740
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
and
p
K1,◦ = {k ∈ K : θl · ζk = 0 for some l with αθl = 0, m1 − ρk = p},
p
K1,• = k ∈ K \ K•1 : θl · ζk = 0 for some l with αθl > 0, m1 − ρk + αθl = p
Then G11 (v) = H11 (T −1 v), where
H11 (z) =
k∈K1,◦
+
θ
θ
λk (z)∇h1 1 z + ζ1,k
·
ζ1,k
θ
λk (z)∇h1 (1 z) · ζ1,k
p
k∈K1,• ∪K1,•
+
λk (z)
k∈K1,•
+
1
θ
∂l ∂l h1 (1 z)
ξ1,kll
2 ij
θ
λk (z) h1 1 z + ζ1,k
− h1 (1 z) .
p
k∈K1,◦
We now need to identify G : E → M|E0 |×|E0 | satisfying (2.11) in Condition 2.8.
Let
RkN (t) = Yk
and
N (V N ) = 0 Z N
H
N V N
N 2p H
t
=
N 2p
k
t
− HN (V N ) = V0N
t
0
N
ρk
0
λk Z N (s) ds
− HN (V N ). Then denoting z⊗2 = zzT ,
⊗2
N V N (s−) + T N ζk − H
N V N (s−)
H
dRkN (s),
which is asymptotic to
k
N
2p+ρk
t
0
⊗2
N V N (s−) + T N ζk − H
N V N (s−)
H
λk Z N (s) ds.
Taking the limit as N → ∞ and integrating with respect to μv0 ,v1 (dv2 ) and
μv0 (dv1 ) then gives the value of G.
5. Examples. We now apply the central limit theorem to several examples of
chemical reaction networks with multiple scales.
5.1. Three species viral model. Ball et al. (2006) considered asymptotics for a
model of an intracellular viral infection originally given in Srivastava et al. (2002)
and studied further in Haseltine and Rawlings (2002). The model includes three
time-varying species, the viral template, the viral genome and the viral structural
741
CLT FOR MULTI-SCALE MARKOV CHAINS
protein, involved in six reactions,
κ1
T + G,
T + stuff
G
T,
(3)
(4)
T + stuff
T
κ3
κ4
T + S,
∅,
(5)
S
G+S
κ6
(1)
(2)
(6)
κ2
κ5
∅,
V,
whose reaction rates (propensities) are of mass-action kinetics form λk (x) =
κk i xiνki with constants
κ1
κ2
κ3
κ4
κ5
κ6
1
0.025
1000
0.25
2
7.5 × 10−6
1,
−2/3
2.5N0 ,
N0 ,
0.25,
2,
−5/3
0.75N0 ,
here expressed in terms of N0 = 1000.
We denote T , G, S as species 1, 2 and 3, respectively, and let Xi (t) denote the
number of molecules of species i in the system at time t. The stochastic model
is
X1 (t) = X1 (0) + Y2
− Y4
t
0
− Y6
t
0
t
0
− Y6
t
0
t
0
0.025X2 (s) ds
t
0
X1 (s) ds
0.025X2 (s) ds
−6
7.5 · 10
X3 (t) = X3 (0) + Y3
− Y5
0
0.25X1 (s) ds ,
X2 (t) = X2 (0) + Y1
− Y2
t
X2 (s)X3 (s) ds ,
t
0
1000X1 (s) ds
2X3 (s) ds
7.5 · 10−6 X2 (s)X3 (s) ds .
742
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
We take
α1 = 0,
α2 = 2/3,
α3 = 1.
The scaling of the rate constants gives
βk
ρk
k
κk
1
1
0
0
2 2.5 −2/3 0
3
1
1
1
4 0.25
0
0
5
2
0
1
6 0.75 −5/3 0.
Changing time t → N 2/3 t, the normalized system becomes
Z1N (t) = Z1N (0) + Y2
t
0
N 2/3 2.5Z2N (s) ds − Y4
Z2N (t) = Z2N (0) + N −2/3 Y1
−N
−N
−2/3
−2/3
t
Y2
N
0
t
Y6
N
0
t
0
0
2/3
0
N 2/3 0.25Z1N (s) ds ,
N 2/3 Z1N (s) ds
2.5Z2N (s) ds
Z3N (t) = Z3N (0) + N −1 Y3
−N −1 Y6
t
t
2/3
0.75Z2N (s)Z3N (s) ds
t
0
,
N 5/3 Z1N (s) ds − N −1 Y5
t
0
N 5/3 2Z3N (s) ds
N 2/3 0.75Z2N (s)Z3N (s) ds .
We assume that the initial value for Z2N is chosen to satisfy Z2 (0) =
limN→∞ Z2N (0) ∈ (0, ∞).
In this model, there are only two time-scales, so we set
m1 = max{ρk − αi : ζik = 0} = max
2
3
− 0, 23 − 23 , 53 − 1, 23 − 1 = 23 ,
and we have r1,N = N 2/3 . We have ζ1,1 = 0, ζ1,2 = e1 , ζ1,3 = e3 , ζ1,4 = −e1 ,
ζ1,5 = −e3 , ζ1,6 = 0. The operator L1 = limN→∞ N −2/3 AN is given by
L1 h(z) = λ2 (z) h(z + e1 ) − h(z) + λ4 (z) h(z − e1 ) − h(z)
+ λ3 (z) − λ5 (z) ∂z3 h(z)
and note that for smooth h,
(5.1)
N −2/3 AN h = L1 h + O N −2/3 .
743
CLT FOR MULTI-SCALE MARKOV CHAINS
Functions h ∈ ker(L1 ) are functions of the coordinate z2 only, E1 = R(S1 ) =
span{e1 , e3 } and E0 = N (S1T ) = span{e2 }. Taking h ∈ D(L0 ) = C 1 (E0 ),
L0 h(z) = lim AN h(z) = λ1 (z) − λ2 (z) − λ6 (z) ∂z2 h(z2 ).
N→∞
Setting V0N = Z2N and V1N = (Z1N , Z3N ), the compensator for V0N is
F N (z) = λ1 (z) − λ2 (z) − λ6 (z),
so F (z) = F N (z) and G0 (z) ≡ 0 in Condition 2.5.
The process corresponding to L1 is piecewise deterministic with Z1 discrete
and Z3 continuous. For fixed z2 , with reference to Condition 2.4, the conditional
equilibrium distribution satisfies
(5.2)
2.5z2 g(z1 + 1, z3 ) − g(z1 , z3 )
+ 0.25z1 g(z1 − 1, z3 ) − g(z1 , z3 )
+ (z1 − 2z3 )
∂g
(z1 , z3 ) μz2 (dz1 , dz3 ) = 0.
∂z3
Note that the marginal for Z1 is Poisson(10z2 ), so
z1 μz2 (dz1 , dz3 ) = 10z2 .
Taking g(z1 , z3 ) = z3 in (5.2), we see
z3 μz2 (dz1 , dz3 ) = 5z2 .
These calculations imply that the averaged value for the drift F is
F (z2 ) =
λ1 (z) − λ2 (z) − λ6 (z) μz2 (dz1 , dz3 ) = 7.5z2 − 3.75z22 ,
with ∇F (z2 ) = 7.5 − 7.5z2 . For the current example, we will see that F and G
in (2.15) can be obtained without explicitly computing with μz2 .
With reference to (2.5), we look for a solution h1 to the Poisson equation
(5.3)
L1 h1 (z) = (z1 − 2.5z2 − 0.75z2 z3 ) − 7.5z2 − 3.75z22 .
Trying h1 of the form h1 (z) = z1 u1 (z2 ) + z3 u3 (z2 ), we have
L1 h1 (z) = u1 (z2 )(2.5z2 − 0.25z1 ) + u3 (z2 )(z1 − 2z3 )
and equating the factors multiplying z1 and z3 , we get u1 (z2 ) = 1.5z2 − 4
and u3 (z2 ) = 0.375z2 . Thus h1 (z) = z1 (1.5z2 − 4) + z3 (0.375z2 ) and H N (z) =
N −2/3 h1 (z).
744
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
Since the solution of (5.3) is exact and (as we shall see) rN = N 1/3 , by (5.1), we
have G1 = 0 in Condition 2.6. With reference to Condition 2.8, (2.9) and (2.10)
are immediate.
The only restriction that remains to determine rN is the asymptotic behavior of
the quadratic variation of Z2N − H N (Z N ) = Z2N − N −2/3 h1 (Z N ). Direct calculation shows that to get a nontrivial G in (2.11) we must take rN = N 1/3 . We then
have
N 2/3 Z2N − H N Z N
=
6
N −2/3
t
0
+
t
t
0
k=1
≈
Z1N (s) ds +
t
0
ζ2k + h1 Z N (s−) − h1 Z N (s−) + N ζk
t
0
2
dRkN (s)
2
−1 − 1.5Z2N (s) + 4 2.5Z2N (s) ds
2
1.5Z2N (s) − 4 0.25Z1N (s) ds
+
t
0
0.75Z2N (s)Z3N (s) ds,
where we observe that jumps by R3N and R5N do not contribute to the limit. Dividing the equation for Z1N by N 2/3 , we observe that
t
0
Z1N (s) ds ≈
t
0
10Z2N (s) ds.
Similarly, dividing the equation for Z3N by N 2/3 we see that
t
0
Z3N (s) ds ≈
1
2
t
0
Z1N (s) ds ≈
t
0
5Z2N (s) ds,
which in turn implies
t
0
Z2N (s)Z3N (s) ds ≈
t
0
5Z2N (s)2 ds.
It follows that G(z2 ) is
10z2 + (3 − 1.5z2 )2 2.5z2 + (4 − 1.5z2 )2 2.5z2 + 3.75z22
= 72.5z2 − 48.75z22 + 11.25z23 .
Let Z2 be the solution of
Z2 (t) = Z2 (0) +
and
UN
= N 1/3 (Z2N
t
0
7.5Z2 (s) − 3.75Z22 (s) ds
− Z2 ). Then
supZ2N (s) − Z2 (s) ⇒ 0 and
s≤t
U N ⇒ U,
CLT FOR MULTI-SCALE MARKOV CHAINS
745
where, for W a standard Brownian motion, U satisfies
U (t) = U (0) +
+
t
0
t
0
72.5Z2 (s) − 48.75Z2 (s)2 + 11.25Z2 (s)3 dW (s)
7.5 − 7.5Z2 (s) U (s) ds.
The corresponding diffusion approximation is
D N (t) = Z2N (0)
+N
+
−1/3
t
0
t
0
72.5D N (s) − 48.75D N (s)2 + 11.25D N (s)3 dW (s)
7.5D N (s) − 3.75D N (s)2 ds.
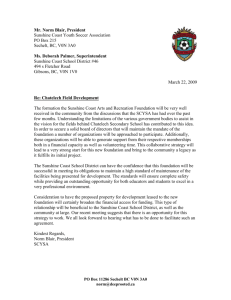
We compare simulations for the original value of the amount of genome X2 (·)
with the approximations given by the Gaussian approximation N 2/3 Z2 (·N −2/3 ) +
N 1/3 U (·N −2/3 ), and the diffusion approximation N 2/3 D N (·N −2/3 ). For comparison we also give the deterministic value given by N 2/3 Z2 (·N −2/3 ). We use
N = 1000 and a time interval on the scale γ = 2/3. The initial values are set to
X1 (0) = X3 (0) = 0, X2 (0) = 10 and 500 realizations are performed for each of
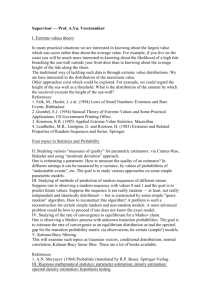
the three stochastic processes. Figure 1 shows the mean and one standard deviation above and below the mean for each of the three processes, and Figure 2 shows
five trajectories for the three processes.
For the diffusion process, these plots use only sample paths that hit one
2/3
(= 100/N0 ) before they hit zero. For small initial values, the diffusion approxi-
F IG . 1. Mean and standard deviation of the amount of genome in the three species model [500 simulations with parameters N0 = 1000, γ = 2/3, X1 (0) = 0, X2 (0) = 10, X3 (0) = 0].
746
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
F IG . 2. Five trajectories of the amount of genome in the three species model (same parameters as
in Figure 1).
mation does not give a good approximation of the probability of hitting zero (and
hence absorbing at zero), before (e.g.) hitting one. Let
τZN = inf t > 0 : Z2N (t) = 0 or Z2N (t) ≥ 1
747
CLT FOR MULTI-SCALE MARKOV CHAINS
and
τDN = inf t > 0 : D N (t) = 0 or D N (t) ≥ 1 .
It is shown in Ball et al. (2006) that
lim P Z N τZN = 0|Z N (0) = N −2/3 k = 4−k
N→∞
while a standard calculation for the diffusion process gives
lim P D N τDN = 0|D N (0) = N −2/3 k = e−(6/29)k .
N→∞
5.2. Michaelis–Menten enzyme model. A basic model for an enzymatic reaction includes three time-varying species, the substrate, the free enzyme and the
substrate-bound enzyme, involved in three reactions:
κ1
(1)
S +E
SE,
(2)
SE
S + E,
(3)
SE
P + E,
κ2
κ3
with mass-action kinetics and with rate constants such that κ2 , κ3 κ1 . To be
precise, let κ2 = κ2 N , κ3 = κ3 N , and κ1 = κ1 .
We denote E, S, P as species 1, 2 and 3, respectively, and let Xi (t) be the
number of molecules of species i in the system at time t. Note that the total number
of unbound and substrate-bound enzyme molecules is conserved, and we let M
denote this amount. The stochastic model is
X1 (t) = X1 (0) − Y1
+ Y3
t
0
t
0
κ1 X1 (s)X2 (s) ds + Y2
t
0
κ2 M
κ2 M − X1 (s) ds
κ3 M − X1 (s) ds ,
X2 (t) = X2 (0) − Y1
X3 (t) = X3 (0) + Y3
t
0
t
0
κ1 X1 (s)X2 (s) ds
κ3 M
+ Y2
t
0
− X1 (s) ds ,
− X1 (s) ds .
If the initial amount of substrate is O(N) M, then the normalizations of the
species abundances are given by
α1 = 0,
α2 = 1,
α3 = 1,
and the scaling exponents for the rate constants are
β1 = 0,
β2 = 1,
β3 = 1.
748
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
The normalized system becomes
Z1N (t) = Z1N (0) − Y1
+Y3
t
0
t
0
Nκ3 M
Z2N (t) = Z2N (0) − N −1 Y1
+ N −1 Y2
t
0
Nκ1 Z1N (s)Z2N (s) ds
− Z1N (s) ds
t
0
t
+ Y2
0
Nκ2 M
− Z1N (s) ds
,
Nκ1 Z1N (s)Z2N (s) ds
Nκ2 M − Z1N (s) ds ,
Z3N (t) = Z3N (0) + N −1 Y3
t
0
Nκ3 M
− Z1N (s) ds
.
Again, there are only two time-scales with the fast time-scale m1 = 1 giving
r1,N = N . Then ζ1,1 = −e1 , ζ1,2 = ζ1,3 = e1 , and the operator L1 is given by
L1 h(z) = κ1 z1 z2 h(z − e1 ) − h(z) + (κ2 + κ3 )(M − z1 ) h(z + e1 ) − h(z) ,
and for smooth h,
N −1 AN h = L1 h + O N −1 .
(5.4)
Functions h ∈ ker(L1 ) are functions of coordinates z2 and z3 only. Thus E1 =
{z1 e1 : z1 = 0, . . . , M} ⊂ R(S1 ) and E0 = N (S1T ) = {(z2 e2 , z3 e3 ) : z2 , z3 ≥ 0}. For
h ∈ D(L0 ) = C 1 (E0 ),
L0 h(z) = κ2 (M − z1 ) − κ1 z1 z2 ∂z2 h(z) + κ3 (M − z1 )∂z3 h(z).
Taking V0N = (Z2N , Z3N ), the compensator for V0N in (2.3) is
T
F N (z) = κ2 (M − z1 ) − κ1 z1 z2 , κ3 (M − z1 ) ,
so F (z) = F N (z) and G0 (z) ≡ 0.
On the fast time-scale, the process whose generator is L1 is a Markov chain on
E1 describing the dynamics of an urn scheme with a total of M molecules, and for
a fixed value of z2 , z3 , with transition rates κ1 z2 for outflow and κ2 + κ3 for inflow.
Its stationary distribution μz2 ,z3 (z1 ) is binomial(M, p(z2 )) for
κ 2 + κ3
,
p(z2 ) =
κ2 + κ3 + κ1 z2
so z1 μz2 ,z3 (dz1 ) = Mp(z2 ).
This observation implies that the averaged value for the drift F is
F (z2 , z3 ) = −M
κ1 κ3 z2
κ1 κ3 z2
,M
κ2 + κ3 + κ1 z2
κ2 + κ3 + κ1 z2
= −κ3 M 1 − p(z2 )
1
−1
T
749
CLT FOR MULTI-SCALE MARKOV CHAINS
with
κ1 κ3 (κ2 + κ3 )
∇F = −M
(κ2 + κ3 + κ1 z2 )2
1 0
,
−1 0
and we need to solve the Poisson equation
L1 h1 (z) = κ2 (M − z1 ) − κ1 z1 z2 + M
κ1 κ3 z2
,
κ2 + κ3 + κ1 z2
κ1 κ3 z2
κ3 (M − z1 ) − M
κ2 + κ3 + κ1 z2
T
for h1 . Trying h1 of the form h1 (z) = (z1 u1 (z2 ), z1 u2 (z2 ))T , we have
L1 h1 (z) = −κ1 z1 z2 u1 (z2 ) + (κ2 + κ3 )(M − z1 )u1 (z2 ), −κ1 z1 z2 u2 (z2 )
T
+ (κ2 + κ3 )(M − z1 )u2 (z2 ) ,
and equating terms with the same power of z1 , we get u1 (z2 ) = (κ1 z2 +
κ2 )/(κ1 z2 + κ2 + κ3 ) and u2 (z2 ) = κ3 /(κ1 z2 + κ2 + κ3 ). Note that u1 (z2 ) +
u2 (z2 ) = 1. Thus
h1 (z) =
z1 κ3
z1 (κ1 z2 + κ2 )
,
(κ1 z2 + κ2 + κ3 ) (κ1 z2 + κ2 + κ3 )
T
T
= z1 u1 (z2 ), 1 − u1 (z2 ) ,
and H N (z) = N −1 h1 (z).
Examining the quadratic variation of V0N − H N ◦ V N , we see that rN must be
1/2
N , and by (5.4), it follows that G1 = 0 in (2.7).
Finally, letting z⊗2 = zzT ,
N V0N − H N ◦ V N
=N
≈
3 t
−1
k=1 0
t
0
+
+
≈
u1 Z2N (s)
1
−
+
0
1 − u1 Z2N (s)
t ⊗2
u1 Z2N (s)
1
−
0
1 − u1 Z2N (s)
0
t u1 Z2N (s)
0
−
1
1 − u1 Z2N (s)
0
1 − u1 Z2N (s)
0 ζk + h1 Z N (s−) − h1 Z N (s−) + N ζk
t 0
t
2
2
− 1 − u1 Z2N (s)
dRkN (s)
κ1 Z1N (s)Z2N (s) ds
⊗2
⊗2
κ2 M − Z1N (s) ds
κ3 M − Z1N (s) ds
− 1 − u1 Z2N (s)
⊗2
2 2
1 − u1 Z2N (s)
κ1 Z1N (s)Z2N (s) ds
750
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
t 2
1 − u1 Z2N (s)
2 − 1 − u1 Z2N (s)
N
N 2
N 2 κ2 M − Z1 (s) ds
0
− 1 − u1 Z2 (s)
1 − u1 Z2 (s)
N 2
N 2 t
u1 Z2 (s)
−u1 Z2 (s)
N
+
N 2
N 2 κ3 M − Z1 (s) ds,
+
0
−u1 Z2 (s)
u1 Z2 (s)
and averaging Z1N gives
lim N V0N − HN ◦ V N t =
N→∞
=
where Z = (Z2 , Z3 ) satisfies
Z(t) = Z(0) +
and
t
0
t
G Z(s) ds
0
t
0
κ1 κ3 Z2 (s)
−1
M
κ2 + κ3 + κ1 Z2 (s) 1
2 g(z2 ) = M 1 − u1 (z2 )
g Z2 (s)
−g Z2 (s)
−g Z2 (s)
g Z2 (s)
ds,
ds
κ1 p(z2 )z2 + κ2 1 − p(z2 )
+ Mu1 (z2 )2 κ3 1 − p(z2 ) .
Let U N = N 1/2 (Z2N − Z2 , Z3N − Z3 )T . Then
sup Z2N (s) − Z2 (s), Z3N (s) − Z3 (s) ⇒ 0 and
s≤t
where U = (U2 , U3 )T satisfies
U (t) = U (0) +
+
t
0
t
0
−1
1
g Z2 (s) dW (s)
Mκ1 κ3 (κ2 + κ3 )
−1
U2 (s)
1
(κ2 + κ3 + κ1 Z2 (s))2
for W a standard scalar Brownian motion.
The corresponding diffusion approximation is
D2N (t)
Z2N (0)
=
+ N −1/2
D3N (t)
Z3N (0)
+
t
0
U N ⇒ U,
t
0
−1
1
ds
g D2N (s) dW (s)
κ1 κ3 D2N (s)
−1
M
N
κ2 + κ3 + κ1 D2 (s) 1
ds.
We compare simulations for 500 realizations of the original model with 500
1/2
realizations of the Gaussian approximation N0 Z2 (·) + N0 U2 (·), N0 Z3 (·) +
1/2
N
N
N0 U3 (·) and of the diffusion approximation N0 D2 0 (·), N0 D3 0 (·). For comparison we also give the deterministic value given by N0 Z2 (·), N0 Z3 (·). We use
CLT FOR MULTI-SCALE MARKOV CHAINS
751
F IG . 3. Mean and standard deviation of the amount of substrate in the Michaelis–Menten model
[500 simulations with parameters N0 = 100, γ = 0, X1 (0) = X3 (0) = 0, X2 (0) = 50, M = 5,
κ1 = 0.1, κ2 = 500, κ3 = 100].
N0 = 100 and a time interval on the scale γ = 0. The initial values are set to
X1 (0) = X3 (0) = 0, X2 (0) = 50 and M = 5, κ1 = 0.1, κ2 = 500 and κ3 = 100.
Figure 3 shows the mean and one standard deviation above and below the mean
for each of the three processes, and Figure 4 shows five trajectories for the three
processes. In this example, both Gaussian and diffusion approximations give good
approximations for the means and the standard deviations of the pair of processes X2 (·), X3 (·).
5.3. Another enzyme model. Another model for an enzymatic reaction includes an additional form for the enzyme which cannot bind to the substrate. There
are now four species, substrate, active enzyme, enzyme-substrate complex and inactive enzyme, involved in five reactions:
κ1
(1)
S +E
SE,
(2)
SE
S + E,
(3)
SE
P + E,
(4)
F
E,
κ2
κ3
κ4
κ5
(5)
E
F,
with mass-action kinetics and rate constants such that κ1 = O(1), κ2 , κ3 = O(N),
κ4 , κ5 = O(N 2 ) so that κ1 = κ1 , κ2 = κ2 N , κ3 = κ3 N , κ4 = κ4 N 2 , κ5 = κ5 N 2 .
752
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
F IG . 4. Five trajectories of the amount of substrate in the Michaelis–Menten model (parameters as
in Figure 3).
We denote E, S, F as species 1, 2 and 3, respectively, and let Xi (t) be the
number of molecules of species i in the system at time t. The total number M of
active, inactive and substrate-bound enzyme molecules is conserved. The stochas-
753
CLT FOR MULTI-SCALE MARKOV CHAINS
tic model is
X1 (t) = X1 (0) − Y1
+ Y2
+ Y3
− Y5
t
0
κ1 X1 (s)X2 (s) ds
κ3 M
κ2 M − X1 (s) − X3 (s) ds
0
t
0
t
− X1 (s) − X3 (s) ds + Y4
t
κ4 X3 (s) ds
0
κ5 X1 (s) ds ,
0
X2 (t) = X2 (0) − Y1
+ Y2
t
t
t
0
κ1 X1 (s)X2 (s) ds
κ2 M − X1 (s) − X3 (s) ds ,
0
X3 (t) = X3 (0) − Y4
t
0
κ4 X3 (s) ds + Y5
t
κ5 X1 (s) ds .
0
If the initial amount of substrate is O(N) M, then the scaling exponents for the
species abundances are
α1 = 0,
α2 = 1,
α3 = 0,
and the scaling exponents for the rate constants are
β1 = 0,
β2 = 1,
β3 = 1,
β4 = 2,
The normalized system becomes
Z1N (t) = Z1N (0) − Y1
+ Y2
+ Y3
− Y5
t
0
t
0
Nκ2 M − Z1N (s) − Z3N (s) ds
Nκ3 M
t
− Z1N (s) − Z3N (s) ds
+ Y4
t
N
0
2
κ5 Z1N (s) ds
Z2N (t) = Z2N (0) − N −1 Y1
+ N −1 Y2
Nκ1 Z1N (s)Z2N (s) ds
t
0
β5 = 2.
t
Z3N (t) = Z3N (0) − Y4
0
t
0
N
0
2
κ4 Z3N (s) ds
,
Nκ1 Z1N (s)Z2N (s) ds
Nκ2 M − Z1N (s) − Z3N (s) ds ,
t
0
N 2 κ4 Z3N (s) ds + Y5
t
0
N 2 κ5 Z1N (s) ds .
754
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
The fastest time-scale has m2 = 2 and r2,N = N 2 , with ζ2,4 = e1 − e3 , ζ2,5 =
−e1 + e3 . The operator L2 is
L2 h(z) = κ4 z3 h(z + e1 − e3 ) − h(z) + κ5 z1 h(z − e1 + e3 ) − h(z) ,
with ker(L2 ) consisting of functions of coordinates z2 and z1 +z3 only. To simplify
our calculations we make a change of variables to (v0 , v1 , v2 ) = (z2 , z1 + z3 , z3 ),
so in this system of variables ζ2,4 = e2 , ζ2,5 = −
e2 with the operator L2
L2 h(v) = κ4 v2 h(v − e2 ) − h(z) + κ5 (v1 − v2 ) h(v + e2 ) − h(v) .
Functions h(v) ∈ ker(L2 ) are now functions of v0 , v1 only. Thus E2 = R(S2 ) =
span{
e2 } and E1 × E0 = N (S2T ) = span{
e1 , e0 }.
The next time-scale has m1 = 1, r1,N = N and ζ1,1 = (0, −1), ζ1,2 = ζ1,3 =
(0, 1). Also
L1 h(v) = κ1 v0 (v1 − v2 ) h (v0 , v1 − 1) − h(v0 , v1 )
+ (κ2 + κ3 )(M − v1 )(h (v0 , v1 + 1) − h(v0 , v1 )
with ker(L1 ) consisting of functions of v0 only. Thus E1 = R(S1 ) = span{
e1 } and
e0 }.
E1 = N (S1T ) = span{
Finally, L0 is
L0 h(v) = −κ1 v0 (v1 − v2 )∂v0 h(v0 ) + κ2 (M − v1 )∂v0 h(v0 ).
The conditional stationary distribution
μv0 ,v1 (dv2 ) of Markov chain with gen
κ5
erator L2 is such that ρ0 (v0 , v1 ) = v2 μv0 ,v1 (dv2 ) = κv41+κ
, thus
5
L1 h(v) = κ1 v0
v1 κ4 h (v0 , v1 − 1) − h(v0 , v1 )
κ4 + κ5
+ (κ2 + κ3 )(M − v1 )(h (v0 , v1 + 1) − h(v0 , v1 ) ,
which has conditional stationary distribution μv0 (dv1 ) such that
M(κ4 + κ5 )(κ2 + κ3 )
,
κ1 κ4 v0 + (κ4 + κ5 )(κ2 + κ3 )
Mκ5 (κ2 + κ3 )
.
ρ2 (v0 ) = v2 μv0 ,v1 (dv2 )μv0 (dv1 ) =
κ1 κ4 v0 + (κ4 + κ5 )(κ2 + κ3 )
ρ1 (v0 ) =
v1 μv0 (dv1 ) =
The compensator for the process V0N is F N (v) = κ2 (M − v1 ) − κ1 v0 (v1 − v2 ) =
F (v), and averaging F gives F 1 (v0 , v1 ) = κ2 (M − v1 ) − κ1 v0 (v1 − ρ0 (v0 , v1 )),
and
F (v0 ) = κ2 M − ρ1 (v0 ) − κ1 v0 ρ1 (v0 ) − ρ2 (v0 )
=−
Mκ1 κ3 κ4 v0
,
κ1 κ4 v0 + (κ4 + κ5 )(κ2 + κ3 )
755
CLT FOR MULTI-SCALE MARKOV CHAINS
so
∇F (v0 ) = −
Mκ1 κ3 κ4 (κ4 + κ5 )(κ2 + κ3 )
.
(κ1 κ4 v0 + (κ4 + κ5 )(κ2 + κ3 ))2
Setting
u1 (v0 ) =
κ1 κ4 v0 + κ2 (κ4 + κ5 )
,
κ1 κ4 v0 + (κ2 + κ3 )(κ4 + κ5 )
u2 (v0 ) =
κ1 v0
,
κ4 + κ5
and
u3 (v0 ) = −
κ1 v0
(κ1 κ4 v0 + κ2 (κ4 + κ5 ))κ1 v0
,
u1 (v0 ) = −
κ4 + κ5
(κ1 κ4 v0 + (κ2 + κ3 )(κ4 + κ5 ))(κ4 + κ5 )
the solutions to the Poisson equations are given by functions
h1 (v) = v1 u1 (v0 ),
h2 (v) = −v2 u2 (v0 ),
h3 (v) = −v2 u3 (v0 ),
and H N = N1 h1 + N12 (h2 + h3 ).
Let rN = N 1/2 and observe that N12 (h2 + h3 ) makes a negligible contribution to
the quadratic variation. Consequently,
N V0N − H N ◦ V N
≈
5
N −1
≈
t
0
+
t
t
0
k=1
−1 + u1 V0N
t
0
ζk2 + h1 V N (s−) − h1 V N (s−) + T N ζk
2
2
dRkN (s)
κ1 V0N V1N − V2N ds
2 1 − u1 V0N κ2 M − V1N ds +
t
0
2
u1 V0N κ3 M − V1N ds.
Hence
2 G(v) = κ3 (κ4 + κ5 )
κ1 v0 (v1 − v2 ) + κ2 (M − v1 )
2 + κ1 κ4 v0 + κ2 (κ4 + κ5 )
κ3 (M − v1 )
2 / κ1 κ4 v0 + (κ2 + κ3 )(κ4 + κ5 )
and
G(v0 ) =
Mκ1 κ3 κ4 v0 (κ3 (κ4 + κ5 )2 (2κ2 + κ3 ) + (κ1 κ4 v0 + κ2 (κ4 + κ5 ))2 )
.
(κ1 κ4 v0 + (κ2 + κ3 )(κ4 + κ5 ))3
If V0 is the solution of
V0 (t) = V0 (0) −
t
0
Mκ1 κ3 κ4 V0 (s)
ds,
κ1 κ4 V0 (s) + (κ4 + κ5 )(κ2 + κ3 )
756
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
then, since G0 = G1 ≡ 0, U N = N 1/2 (V0N − V0 ) ⇒ U where
U (t) = U (0) +
−
t
0
t
0
G V0 (s) dWs
Mκ1 κ3 κ4 (κ4 + κ5 )(κ2 + κ3 )
U (s) ds.
(κ1 κ4 V0 (s) + (κ4 + κ5 )(κ2 + κ3 ))2
The corresponding diffusion approximation is
D
N
(t) = Z2N (0) + N −1/2
−
t
0
t
G D N (s) dW (s)
0
Mκ1 κ3 κ4 D N (s)
ds.
κ1 κ4 D N (s) + (κ4 + κ5 )(κ2 + κ3 )
Finally, we compare simulations for 500 realizations of the original model X2
1/2
with 500 realizations of the Gaussian approximation N0 V0 (·) + N0 U (·) and the
N0
diffusion approximation N0 D2 (·). For comparison we also give the deterministic
value given by N0 V0 (·). We use N0 = 100, a time interval on the scale γ = 0, and
initial values are set to X1 (0) = X3 (0) = 0, X2 (0) = 50 as in the previous example.
Here the additional parameters are set to M = 5, κ1 = 0.5, κ2 = 500, κ3 = 100 and
κ4 = κ5 = 5000. Figure 5 shows the mean and one standard deviation above and
below the mean for each of the three processes, and Figure 6 five trajectories for the
three processes. Again, both Gaussian and diffusion approximations give a good
approximation for the mean and the standard deviation from the mean of X2 (·).
F IG . 5. Mean and standard deviations of the amount of substrate in the three time-scale enzyme
model [500 simulations with N0 = 100, M = 5, γ = 0, X1 (0) = 0, X2 (0) = 50, X3 (0) = 0, κ1 = 0.5,
κ2 = 500, κ3 = 100, κ4 = κ5 = 5000].
CLT FOR MULTI-SCALE MARKOV CHAINS
757
F IG . 6. Five trajectories for the amount of substrate in the three time-scale enzyme model (same
parameters as in Figure 5).
APPENDIX
A.1. Martingale central limit theorem. Various versions of the martingale
central limit have been given by McLeish (1974), Rootzén (1977, 1980), Gänssler
758
H.-W. KANG, T. G. KURTZ AND L. POPOVIC
and Häusler (1979) and Rebolledo (1980) among others. The following version is
from Ethier and Kurtz (1986), Theorem 7.1.4.
T HEOREM A.1.
(A.1)
Let {Mn } be a sequence of Rd -valued martingales. Suppose
lim E supMn (s) − Mn (s−) = 0
n→∞
s≤t
and
Mni , Mnj
t
→ ci,j (t)
for all t ≥ 0, where C = ((ci,j )) is deterministic and continuous. Then Mn ⇒ M,
where M is Gaussian with independent increments and E[M(t)M(t)T ] = C(t).
R EMARK A.2. Note that C(t) − C(s) is nonnegative definite for t ≥ s ≥ 0.
If C is absolutely continuous, then the derivative will also be nonnegative definite
and will have a nonnegative definite square root. Suppose Ċ(t) = σ (t)2 where σ
is symmetric. Then M can be written as
M(t) =
t
σ (s) dW (s),
0
where W is d-dimensional standard Brownian motion.
REFERENCES
BALL , K., K URTZ , T. G., P OPOVIC , L. and R EMPALA , G. (2006). Asymptotic analysis of multiscale approximations to reaction networks. Ann. Appl. Probab. 16 1925–1961. MR2288709
B HATTACHARYA , R. N. (1982). On the functional central limit theorem and the law of the iterated
logarithm for Markov processes. Z. Wahrsch. Verw. Gebiete 60 185–201. MR0663900
C OSTA , O. L. V. and D UFOUR , F. (2003). On the Poisson equation for piecewise-deterministic
Markov processes. SIAM J. Control Optim. 42 985–1001 (electronic). MR2002143
DAVIS , M. H. A. (1993). Markov Models and Optimization. Monographs on Statistics and Applied
Probability 49. Chapman & Hall, London. MR1283589
E THIER , S. N. and K URTZ , T. G. (1986). Markov Processes: Characterization and Convergence.
Wiley, New York. MR0838085
E THIER , S. N. and NAGYLAKI , T. (1980). Diffusion approximations of Markov chains with two
time scales and applications to population genetics. Adv. in Appl. Probab. 12 14–49. MR0552945
G ÄNSSLER , P. and H ÄUSLER , E. (1979). Remarks on the functional central limit theorem for martingales. Z. Wahrsch. Verw. Gebiete 50 237–243. MR0554543
G LYNN , P. W. and M EYN , S. P. (1996). A Liapounov bound for solutions of the Poisson equation.
Ann. Probab. 24 916–931. MR1404536
H ASELTINE , E. L. and R AWLINGS , J. B. (2002). Approximate simulation of coupled fast and slow
reactions for stochastic chemical kinetics. J. Chem. Phys. 117 6959–6969.
K ANG , H.-W. and K URTZ , T. G. (2013). Separation of time-scales and model reduction for stochastic reaction networks. Ann. Appl. Probab. 23 529–583. MR3059268
K URTZ , T. G. (1971). Limit theorems for sequences of jump Markov processes approximating ordinary differential processes. J. Appl. Probab. 8 344–356. MR0287609
CLT FOR MULTI-SCALE MARKOV CHAINS
759
K URTZ , T. G. (1977/78). Strong approximation theorems for density dependent Markov chains.
Stochastic Process. Appl. 6 223–240. MR0464414
K URTZ , T. G. (1992). Averaging for martingale problems and stochastic approximation. In Applied
Stochastic Analysis (New Brunswick, NJ, 1991). Lecture Notes in Control and Inform. Sci. 177
186–209. Springer, Berlin. MR1169928
M C L EISH , D. L. (1974). Dependent central limit theorems and invariance principles. Ann. Probab.
2 620–628. MR0358933
R EBOLLEDO , R. (1980). Central limit theorems for local martingales. Z. Wahrsch. Verw. Gebiete 51
269–286. MR0566321
ROOTZÉN , H. (1977). On the functional central limit theorem for martingales. Z. Wahrsch. Verw.
Gebiete 38 199–210. MR0482956
ROOTZÉN , H. (1980). On the functional central limit theorem for martingales. II. Z. Wahrsch. Verw.
Gebiete 51 79–93. MR0566110
S RIVASTAVA , R., YOU , L., S UMMERS , J. and Y IN , J. (2002). Stochastic vs. deterministic modeling
of intracellular viral kinetics. J. Theoret. Biol. 218 309–321. MR2026325
VAN K AMPEN , N. G. (1961). A power series expansion of the master equation. Canad. J. Phys. 39
551–567. MR0128921
H.-W. K ANG
M ATHEMATICAL B IOSCIENCES I NSTITUTE
O HIO S TATE U NIVERSITY
1735 N EIL AVE .
C OLUMBUS , O HIO 43210
USA
E- MAIL : kang235@mbi.osu.edu
T. G. K URTZ
D EPARTMENTS OF M ATHEMATICS AND S TATISTICS
U NIVERSITY OF W ISCONSIN
480 L INCOLN D R .
M ADISON , W ISCONSIN 53706
USA
E- MAIL : kurtz@math.wisc.edu
L. P OPOVIC
D EPARTMENT OF M ATHEMATICS AND S TATISTICS
C ONCORDIA U NIVERSITY
1450 DE M AISONNEUVE B LVD . W EST
M ONTREAL , Q UEBEC H3G1M8
C ANADA
E- MAIL : lpopovic@mathstat.concordia.ca