Communicating Mathematics III: Z-Corp 650
advertisement

Communicating Mathematics III: Z-Corp 650
Claire Miller
April 20, 2011
1
Abstract
This project looks at fractal geometry with the aim of producing an interesting
3-dimensional model on the ZPrinter 650. After an introduction to the various
denitions of fractal dimension, both regular and randomised fractals are considered
and two methods are outlined for producing fractals. The role of fractals in nance
is looked into as a detailed example of the applications of fractals.
2
Contents
1 Introduction
6
2 An Introduction to Fractal Geometry
6
2.1
2.2
Fractal dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.1.1
Similarity dimension . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.1.2
The Moran Equation . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2.1.3
Box-counting dimension . . . . . . . . . . . . . . . . . . . . . . . .
8
2.1.4
Hausdor Dimension . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Which dimension should we use?
. . . . . . . . . . . . . . . . . . . . . . .
3 Constructing fractals
12
13
3.1
Iterated Function Systems . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
3.2
Apollonian Gaskets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3.2.1
Soddy circles and Descartes' circle theorem
. . . . . . . . . . . . .
16
3.2.2
Construction of Apollonian gaskets . . . . . . . . . . . . . . . . . .
20
3.2.3
Properties of Apollonian gaskets
21
. . . . . . . . . . . . . . . . . . .
4 Examples of regular fractals and their properties
4.1
The Sierpi«ski Triangle
4.2
The T-Square Fractal
22
. . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
5 Randomised Fractals
26
5.1
Randomising the Sierpi«ski Gasket . . . . . . . . . . . . . . . . . . . . . .
27
5.2
The Koch curve and coastlines
27
5.3
. . . . . . . . . . . . . . . . . . . . . . . .
5.2.1
The standard Koch curve
. . . . . . . . . . . . . . . . . . . . . . .
27
5.2.2
The randomised Koch curve . . . . . . . . . . . . . . . . . . . . . .
29
The Chaos Game . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
30
5.3.1
The algorithm
30
5.3.2
Why does this work? . . . . . . . . . . . . . . . . . . . . . . . . . .
31
5.3.3
Can this be done for other fractals?
33
. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . .
6 An Application:
Modelling stock prices through fractal times series
33
6.1
Introduction to Brownian Motion . . . . . . . . . . . . . . . . . . . . . . .
33
6.2
Basic model of Brownian Motion
34
6.3
Randomised model of Brownian motion
. . . . . . . . . . . . . . . . . . .
36
6.4
The Hurst Exponent and R/S Analysis . . . . . . . . . . . . . . . . . . . .
36
6.5
Do actual stocks behave in a fractal way?
38
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . .
7 Producing my 3D shape
40
7.1
Choosing my shape . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
40
7.2
Programming the algorithm in MATLAB
. . . . . . . . . . . . . . . . . .
41
7.3
Producing an OBJ le . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
7.4
Printing with the ZPrinter 650
. . . . . . . . . . . . . . . . . . . . . . . .
47
7.5
The nal product . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
48
3
8 Conclusion
8.1
48
Acknowledgements
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
References
50
A Appendix
52
A.1
sierpinski.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
A.2
tsquare.m
53
A.3
sierpinskiR.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
A.4
koch.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
A.5
kochR.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
A.6
chaosgame.m
55
A.7
stockSim.m
A.8
stockSimR.m
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
56
4
This piece of work is a result of my own work except where it
forms an assessment based on group project work. In the case of
a group project, the work has been prepared in collaboration with
other members of the group. Material from the work of others not
involved in the project has been acknowledged and quotations and
paraphrases suitably indicated.
I have produced all the images that follow in this piece of work
myself using MATLAB and Adobe Photoshop unless an alternate
source is explicitly stated.
5
1
Introduction
In this project I am looking to use the ZPrinter 650, a 3D printer, to produce a model
of an interesting 3D shape, which could act as a teaching aid in a mathematics lecture. I
have decided to focus on creating a 3D fractal object. Fractals are a set of shapes that
have only really been studied in depth in the past 100 years. In fact, the term `fractal' was
only coined in 1975 [1, p.2]. In my opinion, fractals are often particularly aesthetically
pleasing, making them good candidates for a 3-dimensional model. In addition to this,
Benoît Mandelbrot died recently on 14th October 2010.
He was widely known as the
father of fractal geometry [2] and received numerous prizes for his work. Since his death,
fractals have been given a lot of media attention, for example in the BBC4 documentary
`The Secret Life of Chaos' [3], thus making it an interesting time to look into what is
known about fractals today.
Firstly I will look at the concept of fractal dimension and the various denitions and
methods used to calculate it.
I will then look at two dierent ways in which fractals
of a specic nature can be constructed in mathematics. I will apply what I have learnt
to two examples, before exploring randomised fractals, which have more applications in
analysing real world situations.
As a specic example of how fractals can be used to
model natural phenomena I will investigate the modelling of stock price charts through
fractal time series. I will then draw upon all of this information to demonstrate how I
nally decided upon my 3-dimensional shape and how I went about programming the
les required for the ZPrinter 650.
2
An Introduction to Fractal Geometry
The word fractal was conceived by Mandelbrot [4, p.1] and came from the Latin word
`fractus', meaning broken. He dened a fractal as a rough or fragmented geometric shape
that can be split into parts, each of which is (at least approximately) a reduced-size copy
of the whole [1]. This property is called self-similarity. Fractals are seen in nature, as
well as resulting from mathematical algorithms. For example, ferns, trees and broccoli
all have a fractal structure [5, p.16 & p.136]. Fractals contain detail at arbitrarily small
scales and are often obtained by a recursive procedure.
In this section I am going to outline the main aspect of fractal geometry, fractal dimension,
and see how this can be dened and calculated.
The theory, which follows, is based
around two books by Kenneth Falconer, `Fractal Geometry: Mathematical Foundations
and Applications' [6] and `Techniques in Fractal Geometry' [7].
2.1 Fractal dimension
There are many dierent types of fractal dimension, each with its own denition. Fractal
dimension varies from topological dimension as it need not be a natural number [1, p.15]
and is designed to describe how jagged or complex a shape is. Some of the main denitions
are the similarity dimension, the box-counting dimension and the Hausdor dimension,
which I will now outline. Other denitions, which I will not cover, include the divider
dimension, the capacity dimension, the information dimension [5, p.202].
Before introducing the rst denition of fractal dimension, we need to understand what
is meant when a fractal is described as strictly self-similar.
Denition 2.1.
A fractal is
strictly self-similar
replicas of the whole structure.
fractals.
if its parts are identical smaller scaled
Strictly self-similar fractals are also known as
6
regular
2.1.1 Similarity dimension
The similarity dimension is perhaps the simplest denition of a fractal dimension but only
applies to strictly self-similar sets, such as the Cantor set (see Figure 1) or Koch curve
(see Figure 24 on Page 28). Strict self-similarity is required as the denition considers
the set to be made up of a number of replicas of itself, scaled by a common factor less
than 1.
Denition 2.2.
has
A set
F
similarity dimension
made up of
m copies of itself, m > 1, scaled by a factor 0 < r < 1
dimS F = −
log m
log m
=
log r
log 1r
(2.1)
the ratio of the natural logarithms.
Example 2.3.
The Cantor set is one of the rst described fractals [8, p.136] and is
constructed from a straight line by removing the centre third, dividing it into two shorter
lines and then repeating this process for each line segment. The Cantor set is the limit
of this process and is a collection of points as eventually the entire length of the line is
1
3 . Thus it has
log 2
log 2
=
0.6309
(4dp).
This
is
greater
than
the topological
similarity dimension
=
log 3
log( 13 )−1
dimension of a set of points, which is equal to zero, and a non-integer similarity dimension
removed. The set is made up of 2 copies of itself scaled by a factor of
demonstrates the fractal structure of the set. The set could also be considered to be made
up of 4 copies of itself scaled by a factor of
log 4
the same result as
log( 19 )−1
=
log 22
log 32
=
2·log 2
2·log 3
1
9 , by skipping a stage, and this would yield
log 2
= log
3.
Figure 1: The rst four stages of the Cantor set
complexityLinks.html
http://www.bordalierinstitute.com/
2.1.2 The Moran Equation
Unlike the similarity dimension, which can only be applied to self-similar sets where all
the self-similar pieces are scaled by the same factor, the Moran equation allows pieces to
be scaled dierently and thus can be applied to a larger set of fractals. This denition is
described by Mandelbrot in his online Yale classes on fractals [9].
Denition 2.4.
m > 1,
F which can be decomposed into m self-similar pieces,
0 < ri < 1, i = 1, .., m, the Moran equation states that
dim F = d, must satisfy
For a fractal
each scaled by a factor
the fractal dimension,
d
r1d + .. + rm
=
m
X
i=1
7
rid = 1
(2.2)
Pm d
f (d) =
i=1 ri is
limd→∞ f (d) = 0 because each ri
The Moran equation gives a unique solution for
decreasing function with
f (0) = m > 1
and
d
since
a strictly
is smaller
than 1. So by the Intermediate Value Theorem and since the function is strictly decreasing
there will exist a unique solution to
f (d) = 1.
It is important to check that, as a generalisation of the similarity dimension, the Moran
equation gives the same result as Denition 2.2 when the
this case, the Moran equation requires that
gives
log m + d log r = log 1 = 0 ⇒ d =
{ri }
are equal, say to
r.
In
mrd = 1.
Taking logarithms of this equation
Figure 2:
A fractal based on the Sier-
− log m
log r which is the denition for the similarity
dimension.
Example 2.5.
The fractal in Figure 2 is
made up of four self-similar copies of it-
1
2 and
1
one by a factor of
.
Hence the di4
mension d of this fractal must satisfy
d
d
3 · 12 + 41 = 1. By algebra or nuself, three scaled by a factor of
merical methods, such as the Bisection
method or Newton-Raphson method, it
can be found that
d ≈ 1.723
(3dp).
pi«ski triangle [10]
2.1.3 Box-counting dimension
The box-counting dimension, also known as the Minkowski-Bouligand dimension [11],
looks at the number of boxes or disks of a specied radius required to cover the area or
perimeter of a shape. As the radius is decreased, the fractal dimension of the shape can
be ascertained. The box-counting method is considered one of the easiest to implement
[7, p.19] and is therefore a very practical denition.
Denition 2.6.
r
that can cover
F ⊂ Rn , F 6= ∅, let Nr (F ) be the smallest number of sets of diameter
F . The lower and upper box-counting dimensions of F are dened [6,
For
p.38] as
dimB F = lim inf
log Nr (F )
− log r
(2.3)
dimB F = lim sup
log Nr (F )
− log r
(2.4)
r→0
and
r→0
If these are equal, their value is the
box-counting dimension
of
F
log Nr (F )
r→0 − log r
dimB F = lim
(2.5)
To demonstrate how the box-counting dimension is calculated, I will use the common
example of coastlines. This is an example of how the fractal dimension of a perimeter can
be calculated. I will look at a ctional coastline that I have constructed. Figure 3 shows
the number of boxes required to cover the coastline as
8
r
is halved each time.
r
Nr
log Nr
− log r
0.5
4
2
0.25
14
1.9037
0.125
35
1.7098
0.0625
71
1.5374
0.03125
139
1.4238
Figure 3: The rst stages of the box-counting dimension for my ctional coastline and a
table to show the calculations
From the table we see that as
r → 0
the relationship of the logarithms is decreasing
but it is unclear to which value it will converge.
incredibly arduous and as
r
Performing box-counting by hand is
decreases errors become more likely when counting up
N (r),
consequently computer programs have been written to carry out the algorithm, including
a MATLAB program for images and matrix structures.
I will therefore continue my
analysis of this coastline using MATLAB.
Box-counting in MATLAB
Designed and copyrighted by Frederic Moisy in 2008
h×w×3
matrices, where
h
boxcount.m [12] considers images as
w is the width of the
is the height of the image in pixels and
image in pixels. The third dimension of the matrix is 3 as we are considering each pixel of
the image in RGB colour format i.e. three separate numbers relating to the proportions
of red, green and blue making up the colour of the pixel. The code produces a plot of
the log-log relationship between
r
and
N (r)
and a second plot of the gradient of this
relationship. The accuracy of the program is, however, restricted by the quality of the
image as it is unable to consider values of
r
less than 1 pixel. It is able to give a rough
interval for the estimate of the fractal dimension by calculating the average gradient of
the log-log plot for small
r
plus or minus one standard deviation.
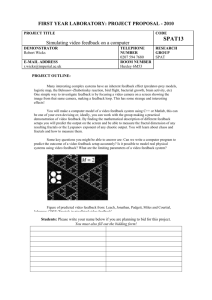
In Figure 4 you can see my MATLAB results when analysing my ctional coastline
Coastline.gif.
The rst plot shows a near linear relationship between
log r and log N (r)
(note that the axes are scaled logarithmically) with the second plot indicating that the
fractal dimension lies between 1.2 and 1.6.
9
Figure 4: MATLAB analysis for my ctional coastline
The data MATLAB has collected is summarised at the bottom of the gure and allows
us to build up a new table showing values of
r
10
and
N (r):
r
in pixels
N (r)
512
1
256
3
128
7
64
19
32
45
16
103
8
232
4
542
2
1374
1
3944
Table 1: Box-counting data for
Coastline.gif
The fractal dimension of my coastline is estimated as
(1.14278 , 1.45202)
from MATLAB
dimB = 1.2974 ± 0.15462 =
which is consistent with what we can see from the second plot and
with the trend I saw when calculating the data by hand.
Similar calculations have been carried out for the coast of Great Britain, as seen in
Figure 5, and have found that the box-counting dimension of the British coastline is
approximately 1.30 [13, p.58]. When this is compared to the coastline of Norway, which
has fractal dimension 1.52, it means that Norway's coastline is more jagged as its fractal
dimension is closer to 2, something which is easily understandable given all the fjords.
Figure 5:
The rst few stages of the box-counting algorithm for the British coastline
http://en.wikipedia.org/wiki/File:Great_Britain_Box.svg
11
2.1.4 Hausdor Dimension
The idea behind the Hausdor dimension is very similar to that of the box-counting
dimension except that the disks covering the set can have dierent radii. The disks form
a
δ -cover,
see Denition 2.7, which means they have a radius smaller than or equal to
δ.
The Hausdor dimension is dened with the help of the s-dimensional Hausdor measure
[6, p.29].
|U | = sup {|x − y| : x, y ∈ U } is the greatest distance between two elements
U.
Note that here
in
U,
and can be thought of as the `radius' of the set
Denition 2.7.
of
F ⊂R
n
s≥0
S∞
|Ui | ≤ δ ∀i and F ⊂ i=1 Ui ,
equal to δ covers all of F .
if
less than or
For
A nite or countable collection of subsets
and
δ>0
we dene the
(
Hδs (F ) = inf
{Ui }
of
Rn
is called a
δ -cover
i.e. the union of these subsets with `radius'
s-dimensional Hausdor measure
∞
X
)
s
|Ui | : {Ui } is a δ − cover of F
(2.6)
i=1
This inmum increases and approaches a limit as
covers is restricted as
δ
δ & 0.
This is because the choice of
number of elements. This limit may equal
0
or
∞.
Now dene
H s (F ) = lim Hδs (F )
δ→0
as the
δ-
decreases, so the inmum is taken of a set containing a decreasing
(2.7)
s-dimensional Hausdor measure of F .
s
H
(F ) will be larger for smaller values of s, as, in the limit once δ is less than 1, the sum
P∞
s
i=1 |Ui | will increase for smaller s since each |Ui | < δ < 1. It can be shown [7, p.22]
0
s
0
that for all sets F that there exists a value for s, say s , for which H (F ) = ∞ if s < s
s
0
and H (F ) = 0 for s > s . This leads to the denition of the Hausdor dimension:
Denition 2.8.
The
Hausdor dimension of F
is dened
dimH F = inf {s ≥ 0 : H s (F ) = 0} = sup {s ≥ 0 : H s (F ) = ∞}
(2.8)
2.2 Which dimension should we use?
Due to its more complex denition, the Hausdor dimension of a shape is more dicult
to calculate than the box-counting or similarity dimensions. However, these dimensions
are the same for all strictly self-similar fractals [14], such as the Cantor set, so for these
fractals we are able to choose whichever denition is most convenient. In cases where the
Hausdor dimension and box-counting dimension are not equal the following inequality
holds [7, p.25]:
dimH
≤ dimB ≤ dimB
So the box-counting dimension can be used as an upper bound for the Hausdor dimension
of a shape. One example where the dimensions dier is the set of rational numbers
[0, 1]
which has
dimH = 0
and
dimB = 1
[5, p.219].
12
Q
on
3
Constructing fractals
As I have stated previously, a regular fractal is one which is strictly self-similar.
This
means that, by zooming into any area of the fractal, you will nd an identical smaller
scaled version of the whole or some part of the whole. This type of fractal can be easily
produced using deterministic rules and iterating them ad innitum.
symmetrical or deterministic fractals
Sometimes called
[13, p.50], these are probably the set of fractals
which most people think of when they hear the word `fractal' and include the Cantor Set
which we saw earlier in Example 2.3 on Page 7. In this section I will consider a method of
producing regular fractals with deterministic rules, as well as looking at the construction
of a set of fractals, produced with circles, which are not strictly self-similar.
3.1 Iterated Function Systems
Iterated function systems, or IFS, were popularised by Barnsley in his book `Fractals
Everywhere' [15] and generate fractals by iterating a collection of transformations. The
resulting fractals are always strictly self-similar. Both the Cantor set and the Sierpi«ski
triangle, which follows in Section 4.1, can be generated using this method. To dene an
iterated function system, it is necessary to rst understand contractions mappings and
metric spaces.
Denition 3.1.
A mapping T : X → X is called a contraction mapping on X if there
c with 0 < c < 1 such that |T (x) − T (y)| 6 c |x − y| for all x, y ∈ X . If
|T (x) − T (y)| = c |x − y| then T maps sets to geometrically similar (smaller) sets and T
exists a
is called a
similarity.
Denition 3.2.
R
A
metric d denes a `distance' in a space X .
and must satisfy the following conditions for all
1.
d(x, y) ≥ 0
2.
d(x, y) = d(y, x)
3.
d(x, z) ≤ d(x, y) + d(y, z)
Example 3.3.
and
d(x, y) = 0
if and only if
It is a function
d : X ×X →
x, y, z ∈ X :
x=y
(Non-negativity)
(Symmetry)
(Triangle Inequality)
The simplest metric you can dene on any non-empty set is the discrete
metric
(
dD (x, y)
=
0 x=y
1 x=
6 y
To check that this denes a metric we need to check the 3 properties stated in Denition
3.2:
1.
dD (x, y) ∈ {0, 1} thus dD (x, y) ≥ 0.In the case when x = y , dD (x, y) = 0 as required
and dD (x, y) = 1 6= 0 otherwise.
2. If
x=y
then
dD (x, y) = 0 = dD (y, x),
otherwise
dD (x, y) = 1 = dD (y, x)
for
x 6= y .
3. Here there are a few cases to consider:
x = z then y can either be equal to both x and z , giving dD (x, z) = 0 ≤
dD (x, y) + dD (y, z) = 0 + 0, or y can take a dierent value, giving dD (x, z) =
0 ≤ dD (x, y) + dD (y, z) = 1 + 1 = 2.
(a) if
13
x 6= z then y can either be equal to one of x and z , giving dD (x, z) = 1 ≤
dD (x, y) + dD (y, z) = 1 + 0, or y can take a dierent value to both x and z ,
giving dD (x, z) = 1 ≤ dD (x, y) + dD (y, z) = 1 + 1 = 2.
(b) if
Thus the discrete metric,
Denition 3.4.
sure/metric
in
X
d.
A
dD ,
is a well dened metric.
metric space (X, d) is the pairing of a space X with a distance meacomplete if every Cauchy sequence of terms
A metric space is said to be
X with respect to the metric d [15, p.18], where a Cauchy se(xi ) such that for any > 0 there exists some n > 0 with d(xi , xj ) < converges to a limit in
quence is a sequence
for all
i, j > n.
Example 3.5.
Is the space X coupled with the discrete metric (X, dD ) complete? Firstly
(xi ) be a Cauchy sequence within this space, then for all ε > 0 there exists some n with
dD (xi , xj ) < ε for all i, j > n. Consider ε = 12 . Under the discrete metric dD (xi , xj ) < 12
if and only if xi = xj and hence since (xi ) is a Cauchy sequence there exists some n after
which xi = xj for all i, j > n. Thus every Cauchy sequence with respect to the discrete
metric dD is a constant sequence for large n, which of course converges to an element of
X . The metric space (X, dD ) is therefore complete.
let
With this understanding of contraction mappings and metric spaces we can now introduce
iterated function systems as follows:
Denition 3.6.
An
iterated function system (IFS) is a nite set of contraction mappings
{Ti : X → X | i = 1, .., n }, n ∈ N, on a complete
Sn metric
is invariant for the mappings {Ti } if F =
i=1 Ti (F ).
space
(X, d).
A subset
F ⊂X
These invariant sets are often
fractals.
Example 3.7.
mappings
T2 (F )
One simple example is the Cantor set as described in Example 2.3. Its
T1 (x) = 31 x and T2 (x) = 31 x + 23 . Thus T1 (F ) and
and right sections of F and F = T1 (F ) ∪ T2 (F ). Hence F , the
for the iterated function system {T1 , T2 }.
T1 , T2 : R → R
are just the left
Cantor set, is invariant
If the mappings
{Ti }
are given by
are ane maps, they can also be written in matrix form.
For
example in two dimensions:
x1
x2
Ti (x) = Ti
=
ai
ci
bi
di
x1
x2
+
ei
fi
A collection of such mappings is then often conveyed as a table of the values
(3.1)
{ai }, {bi }
etc. as seen in the next example.
Example 3.8.
The table for the mappings which create the Sierpi«ski triangle with side
length 1, see Section 4.1, is as follows [15, p.86]:
T
a
b
c
d
e
f
1
0.5
0
0
2
0.5
0
0
0.5
0
0
0.5
0.5
0.5
0.25
0
√
3
4
3
0.5
0
0
Table 2: IFS for the Sierpi«ski triangle
14
In this case the matrix
ai
ci
bi
di
is unchanged for each
factor of 0.5 and the translations
ei
fi
Ti
and represents scaling by a
change to position the three scaled copies of the
triangle at each vertex. In Figure 6 you can see the locations that the larger triangle is
mapped to by each
Ti .
Figure 6: The 3 mappings for the Sierpi«ski Triangle IFS
As well as drawing mathematical objects, IFS can be used to model natural objects which
behave in a fractal manner such as ferns and trees [15, p.87].
3.2 Apollonian Gaskets
Apollonian gaskets are produced by removing circles of varying sizes from an area to
leave a gasket of points which have not been removed.
Below, in Figure 7, are a few
examples of Apollonian gaskets, which give an idea of the style of fractal produced. In
this section we'll consider their construction and the geometry behind it, as well as some
of the properties of Apollonian gaskets. The concepts are based on a number of journal
articles [16, 17, 18] and a chapter in Mandelbrot's book `The Fractal Geometry of Nature'
[1].
Figure 7: Three examples of Apollonian gaskets from
Apollonian_gasket
15
http://en.wikipedia.org/wiki/
To better understand this method of producing fractals, we'll need to learn a bit about the
geometry of circles, in particular, the relationship between the radii of mutually tangent
circles.
3.2.1 Soddy circles and Descartes' circle theorem
A lot of information about the geometry of circles can be found in `A Treatise on the
Circle and the Sphere' [19, pp.31-43].
This book was written in 1916 before the main
theorem we will look at in this section, Theorem 3.11, was widely recognised but contains
important denitions for the relationships between circles, such as tangency, and their
characteristics.
Denition 3.9.
tangent
Two circles with centres
(xi , yi )
and radii
if they intersect at a single point. A circle is
contains the other and
externally tangent
ri ,
for
i = 1, 2,
internally tangent
are
mutually
to another if it
to it otherwise.
In Figure 8 we see some examples of both external and internal tangency of the white
circle to the black circle, on the left and right respectively.
Figure 8: Tangent circles
http://mathworld.wolfram.com/TangentCircles.html
This denition prescribes a specic relationship between the centres and radii of the two
circles, namely
2
2
(x1 − x2 ) + (y1 − y2 ) = (r1 ± r2 )
2
where `+' refers to externally tangent circles and `−' to internally tangent ones.
(3.2)
This
relationship means that the distance between the centres of the two circles must either
be equal to the sum or the dierence of the two radii. As seen in Figure 9, tangent circles
share a common tangent and the relationship follows directly from the diagram with the
help of Pythagoras' Theorem.
16
Figure 9: The relationship between the radii and centres of tangent circles
Consider the following problem: You are given three mutually tangent circles
with radii
a, b
and
to all three circles.
c
A, B
and
C
respectively and asked to draw a fourth circle which is also tangent
This is a specic form of Apollonius' problem, where in the more
generalised problem the three initial circles are not required to be mutually tangent.
In Figure 10 we can see two possible solutions to the problem, drawn in red. In the case
of the larger red circle it is internally tangent to each of the three initial circles and is
said to be circumscribed to the circles
A, B
and
C.
The smaller red circle is externally
tangent to the initial circles and is said to be inscribed in the circles
A, B
and
C.
Figure 10: Two solutions to Apollonius' problem given the three initial black circles
As it turns out these are the only two solutions to the problem and are called the
and outer Soddy circles
inner
[20]. The radii for these two circles can then be determined using
17
a formula from Descartes. Before stating the formula, here is a denition which will help
us to rearrange the formula and thus simplify the result.
Denition 3.10.
The
curvature
reciprocal of its radius i.e.
(or
k = ± 1r .
bend ) of a circle, k, is dened as plus or minus the
The curvature of a circle is positive if it is externally
tangent to all other circles and it is negative if it is internally tangent to all other circles.
A straight line has curvature 0 as it can be thought of as a circle with innite radius.
The statement of the theorem below is based upon its appearance in two articles `Beyond
the Descartes Circle Theorem' [17] and `A Tisket, a Tasket, an Apollonian Gasket' [16].
Figure 11 gives an example of four mutually tangent circles, to which you could apply
the theorem.
Figure 11: Four mutually tangent circles
Theorem 3.11. Descartes' Circle Theorem
If four mutually tangent circles have radii ri , for i = 1, .., 4, then
1
1
1
1
1
+ 2+ 2+ 2 =
r12
r2
r3
r4
2
1
1
1
1
+
+
+
r1
r2
r3
r4
2
Alternatively, considering the curvatures of the four circles, ki =
relationship
(3.3)
1
ri
for i = 1, .., 4, the
1
2
(k1 + k2 + k3 + k4 )
2
(3.4)
p
k4 = k1 + k2 + k3 ± 2 k1 k2 + k2 k3 + k3 k1
(3.5)
k12 + k22 + k32 + k42 =
holds. This can be rearranged to give
where the `+' refers to the inner Soddy circle and the `-' refers to the outer one.
Information regarding the proof of this theorem can be found in the article `On a Theorem
in Geometry' [21] by Daniel Pedoe.
18
The circles, whose radii we can calculate using this theorem, were named after Soddy
after he rediscovered Descartes' theorem in 1936 and was so inspired by the beauty of
Apollonian circles that he published a poetic version of the theorem in the journal Nature
[22]. His poem was called `The Kiss Precise' and it reads as follows:
Four circles to the kissing come
The smaller the benter.
The bend is just the inverse of
The distance from the center.
Though their intrigue left Euclid dumb,
There's now no need for rule of thumb.
Since zero bend's a dead straight line,
And concave bends have minus sign,
The sum of the squares of all four bends
Is half the square of their sum.
Soddy is also attributed with the reformulation of Descartes' theorem [18] which states
that
r4 =
Proof.
r1 r2 r3
p
r1 r2 + r2 r3 + r3 r1 ± 2 r1 r2 r3 (r1 + r2 + r3 )
Using the relationship
ki =
(3.6)
1
ri we will ensure that this formulation agrees with
(3.5) of Descartes' theorem:
r4
For
ri 6= 0, ∀i,
r1 r2 r3
p
r1 r2 + r2 r3 + r3 r1 ± 2 r1 r2 r3 (r1 + r2 + r3 )
we have
1
k4
k4
=
=
1
k1 k2 k3
=
1
k1 k2
+
1
k2 k3
+
1
k3 k1
1
1
1
+
+
±2
k1 k2
k2 k3
k3 k1
r
± 2 k1 k12 k3 k11 +
s
1
k1 k2 k3
s
k4
k3 + k1 + k2 ± 2
=
k4
k1 k2 k3
= k3 + k1 + k2 ± 2
1
k2
+
1
k3
1
1
1
+
+
k1
k2
k3
!
1
1
1
+
+
k1
k2
k3
· k1 k2 k3
p
k2 k3 + k1 k3 + k1 k2
This is equivalent to (3.5).
With the radius of the fourth circle determined by (3.6) and the relationship between the
centres and radii of mutually tangent circles given in (3.2) we can calculate the centre of
the fourth circle
(x4 , y4 )
and draw it.
19
3.2.2 Construction of Apollonian gaskets
Apollonian gaskets can be constructed in three ways [23]:
the Mandelbrot algorithm,
the Soddy algorithm and an IFS algorithm created by Alexei Kravchenko and Dmitriy
Mekhontsev.
I am going to outline the Soddy algorithm as it uses what I have just
explained about mutually tangent circles, whereas Mandelbrot's algorithm relies on circle
inversion.
An Apollonian gasket starts at stage 0 with three circles
mutually tangent.
and denoted
C4
C1 , C2
and
C3 ,
which are
The inner and outer Soddy circles are then added to the diagram
and
C5
respectively.
dierent triplets of circles, say
C1 , C2
We now have 5 circles and can begin to take
C4 , and look at the two Soddy circles for
C6 , corresponding to the inner Soddy circle,
this case C3 . This procedure is carried out
and
these three. This will give us one new circle
and one circle which we already have, in
with every triplet of circles adding 6 circles in total.
stage for all triplets of circles.
This is then continued at each
One can think of the process of adding inner Soddy
circles as lling each approximately triangular curved void with the largest possible circle
at each stage of the iteration.
By adding a circle, three new triangular shaped voids
are created, thus at each stage of the iteration
since only two circles are added at stage 1.
3+2+
Pn
i−1
= 3+2+2
i=2 2 · 3
1−3n
1−3
n > 0
there are
2 · 3n−1 circles
added,
This gives a total number of circles of
− 1 = 2 + 3n
after
n
stages. This algorithm
can be easily programmed on the computer using the formulae for the radii and centres
of mutually tangent circles discussed in the previous section, whereas a computer has no
intuitive way to t the largest possible circle in a triangular void.
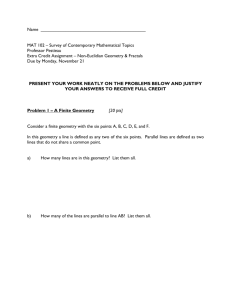
In Figure 12 we see an Apollonian gasket generated from three circles of equal radius with
the circles
Ci
are labelled for stages 0 (shaded pink), 1 (shaded purple) and 2 (shaded
green).
Figure 12:
Apollonian gasket generated from 3 circles of equal radius (adapted from
http://en.wikipedia.org/wiki/File:Apollonian_gasket.svg)
20
3.2.3 Properties of Apollonian gaskets
Apollonian gaskets are a class of fractals which are not strictly self-similar [1, p.172].
Therefore to work out the fractal dimension of an Apollonian gasket we cannot use the
similarity dimension or Moran equation.
In this case the box-counting dimension is a
practical method to estimate the fractal dimension and, for a more accurate result, I will
once again use the MATLAB code
boxcount.m, as introduced in Section 2.1.3 on Page 9.
I
will consider the fractal dimension of the Apollonian gasket constructed from three circles
of equal radius as seen in Figure 12. MATLAB produces the plots seen in Figure 13 and
estimates the fractal dimension to be
dimB = 1.4328±0.27301 = (1.15979 , 1.70581).
This
interval is fairly large and does not really give us any information about the Apollonian
gasket, other than conrming that it does indeed behave in a fractal manner. At present
the exact dimension of this Apollonian gasket is still unknown but in 1973 it was proved
1.300197 < dim < 1.314534 [24] and more recently it has be shown
1.305688 [25]. Both of these estimates fall within our estimated interval.
that
that
dim ≈
Figure 13: MATLAB output for the Apollonian Gasket in Figure 12
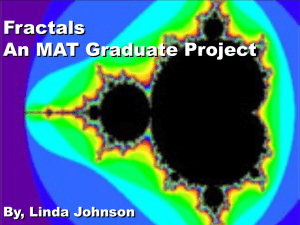
One very interesting fact about the relationship between the bends (or curvatures) of
Apollonian gasket circles is that, if the rst four circles have integer bends, then so does
every other circle in the gasket [16]. In Figure 14 we see an example where the bends of
the rst four circles are -1 (the outer circumscribing circle), 2, 2 and 3. All other circles
are marked with their integer bends and naturally the smaller the circle the greater the
bend.
21
Figure 14: The bends of an Apollonian gasket with initial bends {-1,2,2,3} from
//en.wikipedia.org/wiki/File:ApollonianGasket-1_2_2_3-Labels.png
http:
As far as applications go, randomised (see Section 5 on Page 26) Apollonian gaskets can
be used to model foams or powders [16].
4
Examples of regular fractals and their properties
In order to better understand fractals I will investigate some two-dimensional fractals: the
Sierpi«ski triangle and the lesser known T-Square fractal. This will give me the chance
to analyse fractal dimensions myself and study the behaviour of these particular fractals.
4.1 The Sierpi«ski Triangle
Figure 15: The formation of the Sierpi«ski triangle
22
The Sierpi«ski triangle, also known as the Sierpi«ski gasket, is created through an iterative
algorithm.
Starting with an equilateral triangle, the midpoints of each side are found
and connected to form an inverted smaller triangle, which is then removed. The same
procedure is then applied to each of the remaining triangles at each stage. The Sierpi«ski
triangle is dened as the limit of this process and is strictly self-similar since each of the
three sub-triangles is an exact half-scaled replica of the whole.
Figure 16: The Sierpi«ski Triangle, created from my MATLAB code
sierpinski.m
(see
Appendix A.1)
Properties of the Sierpi«ski Triangle:
•
A
•
i
3 n
limn→∞ A · 4 = 0.
It has a zero area since each iteration
at stage 0, and
It has an innite perimeter since each iteration
an initial perimeter of
•
has the area
P,
and
limn→∞ P ·
i
A·
3 i
4 , assuming an area of
has perimeter
P·
3 n
tends to innity.
2
3 i
2 , assuming
log 3
log 2 ≈ 1.585 because it is the union of three
copies of itself scaled by one half. The dimension falling between 1 and 2 is appropriIt has similarity dimension
dimS =
ate since the Sierpi«ski Triangle can be seen as being `larger' than a 1-dimensional
object, since it has innite length, and `smaller' than a 2-dimensional object, since
it has zero area.
•
The IFS for the Sierpi«ski Triangle was seen in Example 3.8 on Page 14.
Another interesting property of the Sierpi«ski Triangle is its link to Pascal's Triangle [26].
It can be produced by taking Pascal's triangle modulo 2 and then placing a triangle over
any entries which are 1 (mod 2), as demonstrated in Figure 17 on page 24.
23
Figure 17: How a Stage 2 Sierpi«ski Triangle can be created from Pascal's Triangle with
8 rows.
4.2 The T-Square Fractal
Figure 18: Construction of the T-Square fractal
The T-Square fractal is generated from a square. At each outward pointing corner a new
1
2 , is then overlaid, centred on the original corner.
process is then repeated at each stage for all outward pointing corners.
square, scaled by a factor of
24
This
Figure 19: The T-Square Fractal after 5 iterations from my MATLAB code
tsquare.m
(see Appendix A.2)
The T-Square fractal is another example of a fractal with an innite perimeter bounding
a nite area, with the white area within the square tending to zero after many iterations.
But what is its dimension? There are two aspects of this shape for which we can analyse
the dimension: the enclosed area and the perimeter.
Looking at the enclosed area,
TA ,
we see that the area expands to ll the unit square,
1
2 . Thus when calculating the
box-counting dimension of the area it behaves just as the unit square and each sub-square
−2
contains a part of the area i.e. Nr (TA ) = r
where r is the length of the sides of each
assuming the initial square at stage 0 has sides of length
sub-square. This behaviour can be seen in Figure 20.
Figure 20: Box-counting for the T-Square fractal
We therefore have a box-counting dimension
log r−2
log Nr (TA )
dimB (TA ) = lim
= lim
=2
r→0
r→0 − log r
− log r
Looking at the boundary,
TP ,
(4.1)
we can use the denition of the similarity dimension (Def-
inition 2.2) to nd the fractal dimension.
25
Figure 21: Construction of self-similar corners in the T-Square fractal
In the above image we see that, at each new stage, each corner (shown in red) is transformed into three smaller corners (shown in green) which have been scaled by a factor of
1
2 . Thus, when the iterative process is carried out an innite number of times, each corner
will contain 3 smaller scaled replicas of itself. Therefore the similarity dimension of the
ln 3
3
T-Square fractal boundary is dimS (TP ) = −
= ln
ln 2 ≈ 1.585. This is the same as the
ln 12
dimension of the Sierpi«ski Triangle, which means that the perimeter of the T-Square
fractal is as complex and lls 2-dimensional space in the same way as the Sierpi«ski
Triangle.
5
Randomised Fractals
So far I have only discussed deterministic fractals and their properties, however, these
have very few applications in the real world as no natural/real world processes produce
such perfectly symmetrical, predictable shapes. Benoît Mandelbrot himself commented
on the asymmetry of nature, observing that clouds are not spheres, mountains are not
cones, coastlines are not circles [1, p.1]. For regular fractals, once you know the algorithm
for producing them, anyone can construct them and get an identical result. Mandelbrot
therefore described regular fractals as nothing but appetizers [8, p.139].
I am going
to look at another set of fractals, randomised fractals, which provide a more realistic
way of modelling natural objects [5, p.459] and can produce a variety of structures due
to their random nature. Random fractals are a combination of deterministic generating
rules (such as IFS) and elements of random behaviour.
There are many applications for such randomised structures in the modelling of natural
objects for experiments or even computer games. For example modelling the structure
of the bronchioles in the lungs [13, p.51] or generating coastlines, trees and clouds for
ctional landscapes in computer games.
In this section some examples of randomisation will be introduced along with their applications. The last part of the section focuses on a random algorithm which astoundingly
produces a regular fractal and how this is possible.
26
5.1 Randomising the Sierpi«ski Gasket
Here is an example of how a deterministic algorithm, which we've already seen, can
be randomised to produce random fractals.
Previously, the Sierpi«ski gasket has been
constructed by nding the midpoint of each side of a triangle, dividing it into 4 equilateral
triangles and removing the triangle in the centre. One way we can randomise the creation
of this structure is to take a random point along each side instead of the midpoint [5,
p.459].
We can then divide the triangle into four irregular triangles and remove the
centre triangle as usual. This procedure requires three random numbers
r1 , r2 , r3 ∈ (0, 1)
between 0 and 1 for each triangle at each stage and then the points along the triangle
edges are calculated as
(xij , yij ) = (ri · xi + (1 − ri ) · xj , ri · yi + (1 − ri ) · yj )
for
i, j ∈
{1, 2, 3}.
This produces some rather nice images but does not really have any practical application
other than to demonstrate what is meant by a randomised fractal.
Figure 22: Two examples of randomised Sierpi«ski gaskets with 3 and 4 iterations respectively, created from my MATLAB code
sierpinskiR.m
(see Appendix A.3)
5.2 The Koch curve and coastlines
The Koch curve is another example of a regular fractal which can be randomised. However, its randomised form has many uses in modelling irregular boundaries, such as coastlines and clouds. Particularly in computer games it is useful to be able to create complex
irregular structures, which require very little stored information for construction; the IFS
and instructions for randomisation will suce. I will now introduce both the standard
and randomised Koch curves and how they can be constructed.
5.2.1 The standard Koch curve
The standard Koch curve is a regular fractal produced by an iterative algorithm, starting
from a straight line segment. At each stage all line segments from the previous stage are
divided into three equal pieces. An equilateral triangle is then drawn on with the middle
third as its base, pointing outwards. Finally, the base of the triangle (the middle segment
of the original line) is removed. In Figure 23 we can see the rst 3 stages of the Koch
curve and in Figure 24 after many iterations.
27
Figure 23: The rst 3 stages of the Koch curve, created from my MATLAB code
koch.m
(see Appendix A.4)
In order to program this algorithm in MATLAB, it is important to consider the coordinates of the points that are introduced for each line segment at each stage. Consider two
A = (a1 , a2 ) and B = (b1 , b2 ), two arbitrary points connected by a straight line at
i − 1 of the curve. In the next stage of the iteration 3 new points will need to be
introduced: 2 separating the line segment into 3 pieces, C = (c1 , c2 ) and D = (d1 , d2 ),
and 1 marking the top of the equilateral triangle, E = (e1 , e2 ). Using the properties of
points
stage
straight lines and the angles of an equilateral triangle the coordinates can be worked out
as follows:
2a1 + b1 2a2 + b2
,
3
3
C
1
1
= A + (B − A) = (a1 , a2 ) + ((b1 , b2 ) − (a1 , a2 )) =
3
3
a1 + 2b1 a2 + 2b2
,
3
3
D
2
2
= A + (B − A) = (a1 , a2 ) + ((b1 , b2 ) − (a1 , a2 )) =
3
3
E
=
!
√
√
3
3
1
1
(a1 + b1 ) −
(b2 − b1 ) , (a2 + b2 ) +
(a2 − a1 )
2
2
2
2
If this algorithm is carried out ad innitum we have a Koch curve, which has innite
length. The Koch curve is continuous everywhere but dierentiable nowhere [27] since
there are no breaks in the curve but there are also no smooth lines at any point. In Figure
24 we see an approximation to the Koch curve, after 10 iterations, as MATLAB cannot
plot innite detail.
Figure 24: The Koch Curve after 10 iterations, created from my MATLAB code
28
koch.m
As a regular fractal we can also dene an iterated function system which summarises the
algorithm (as dened in Section 3.1).
The table below shows the four transformations
required to create the four smaller line segments from a line segment at each stage.
T
a
1
1
3
1
6
1
6
1
3
2
3
4
b
0
√
−√ 63
3
6
0
c
d
e
f
0
√
3
6√
− 63
0
1
3
1
6
1
6
1
3
0
0
1
3
1
2
2
3
0
√
3
6
0
1
3 and translation to
1
either end of the original line. While T2 and T3 represent shrinking by
3 as well as a
◦
rotation by 60 and appropriate translation.
T1
and
T4
represent a shrinking of each line segment by a factor of
5.2.2 The randomised Koch curve
The Koch curve can be randomised very simply by varying whether the equilateral triangle
added to each line segment points outwards or inwards [5, p.459]. The algorithm is almost
identical to that of the standard Koch curve except that for each line segment from the
previous stage a fair coin is tossed. If `heads' is tossed an equilateral triangle is attached
to the line segment pointing outwards and if `tails' is tossed an equilateral triangle is
attached to the line segment pointing inwards. Thus both possible outcomes for each line
segment have probability 0.5. In MATLAB I have simulated the coin toss by generating a
pseudorandom number
r
between 0 and 1 and dening `heads' as the event that
r < 0.5.
The two possible outcomes can be seen below:
Figure 25: The two possible outcomes for each line segment in a randomised Koch curve
As a result of this element of randomness there are innitely many possible randomised
Koch curves, if we carry out the algorithm ad innitum. In Figure 26 there is an example
of one possible curve. The similarities between the curve and a generic coastline are clear
to the naked eye as what appear to be bays, headlands and even islands appear along the
curve.
29
Figure 26:
A randomised Koch curve, created from my MATLAB code
kochR.m
(see
Appendix A.5)
Mathematically, it is similar to coastlines in the fact that it is said to have many length
scales [28, p.63].
This mean that if you were to measure the length of the curve you
would get dierent measurements depending on the length of the ruler you used, with
longer lengths measured by shorter rulers. If the fractal process for the randomised Koch
curve is made more complicated, then the fractals produced can look as realistic as if
they'd been traced from a shipping chart [8, p.139].
5.3 The Chaos Game
The chaos game, a term coined by Michael Barnsley [15, p.2], is an astounding example of
how a random algorithm can produce a regular fractal. There are many sets of rules for
the chaos game, which each produce a dierent fractal shape, but I am going to look at a
set which produces the Sierpi«ski Triangle, which I looked at earlier in Section 4.1. The
game begins with an initial game point
(x1 , y1 )
which can be chosen at random and this
is set as our current game point. After this, using a randomised iterative process and the
three vertices of an equilateral triangle, a sequence of game points is created and plotted.
The resulting gure after approximately 10,000 steps is clearly the Sierpi«ski gasket.
5.3.1 The algorithm
Here is a more precisely dened set of rules for the algorithm [29, p.10]:
1. Start with an equilateral triangle with vertices
B = (1, 0)
and
C=
√
( 21 , 23 ).
2. Randomly select the initial game point
A, B
and
z1 = (x1 , y1 ).
C.
For example
A = (0, 0),
This can be from within the
boundaries of the triangle but this is not compulsory.
3. Roll a fair die:
(a) If a 1 or 2 is rolled, plot the next game point
the current game point
zn
and
(b) If a 3 or 4 is rolled, plot the next game point
the current game point
zn
and
zn
and
at the midpoint between
zn+1
at the midpoint between
zn+1
at the midpoint between
B.
(c) If a 5 or 6 is rolled, plot the next game point
the current game point
zn+1
A.
C.
30
4. Repeat step 3 with the new game point as many times as desired.
I have programmed this algorithm in MATLAB and carried out the procedure for various
numbers of steps to produce the following diagrams:
Figure 27: Plots of the Chaos Game after various numbers of game points with initial
game point (0.1,0.1), created from my MATLAB code
I used
(0.1, 0.1)
chaosgame.m
(see Appendix A.6)
as my initial game point and it is clear in the diagrams that this point
is not part of the Sierpi«ski gasket, the sequence does however converge to points within
the gasket.
5.3.2 Why does this work?
A full proof is outlined in `Chaos and Fractals' [5, pp.297-352] but I will provide a simpler
sketch of the proof.
Firstly we need to consider the locations of points within the gasket itself. At the
there are
3k
possible subtriangles that a point
P
can be given an address comprising of the numbers
31
k th level
could sit in. Each of these subtriangles
si ∈ {1, 2, 3}
where 1 means the
lower left triangle, 2 means the lower right triangle and 3 means the upper triangle. This
method of labelling the subtriangles is best shown as a diagram (see Figure 28 below).
Figure 28: Labelling system for the subtriangles of the Sierpi«ski gasket
The probability that
P
sits in a particular subtriangle
s1 s2 ...sk
is therefore
1
, one divided
3k
by the total number of subtriangles at that level, since each subtriangle has equal area.
Now we will consider the 3 possible outcomes of step 3 of the algorithm in Section 5.3.1
to be contraction mappings
T3
T1 , T2
and
T3 ,
where
T1
T2
relates to outcome (a),
to (b) and
to (c).
T1 (xn , yn ) =(xn , yn ) +
T2 (xn , yn ) =(xn , yn ) +
T3 (xn , yn ) =(xn , yn ) +
1
2
1
2
1
2
((0, 0) − (xn , yn )) =
((1, 0) − (xn , yn )) =
√ 3
1
2, 2
− (xn , yn ) =
1
2
1
2
(xn , yn )
(xn , yn ) +
1
2
(xn , yn ) +
1
2, 0
√ 3
1
4, 4
We note that these are the very same contraction mappings that we saw for the Sierpi«ski
triangle IFS in Example 3.8 on Page 14 and recall that a fractal is invariant under the
IFS used in its construction. Hence we can conclude that, once a point
zn , n > N , also belong
(zn ), n > N , will converge to the
a point of the gasket, all subsequent points
we have such a
zN
the sequence
P
i.e.
is at most
coincides with
Sierpi«ski gasket.
z1 the sequence will get
> 0 from P . Consider P
Now we show that from any initial game point
to a point of the gasket
zN
to the gasket. So once
arbitrarily close
to be contained
D in the mth stage, with a diameter 21m , then we can choose m large
1
enough that m < . If D has an address s1 s2 ...sm , for example 132 as shown in Figure
2
28, where each si ∈ {1, 2, 3}, and the chaos game is left to run for long enough then we
within a triangle
D
so
This is guaranteed to happen as any sequence of mappings of length
m
will eventually detect a sequence of mappings
is within
of
P.
has probability
1
3m
>0
Ts1 ,Ts2 , ...,Tsm and
our point falls in
and the game can be left to run for an innite length of time.
Thus we can get arbitrarily close to any point
P
of the gasket, so will eventually converge
to one of its points and once this happens, as stated above, all points which follow will
also be on the gasket.
32
5.3.3 Can this be done for other fractals?
Other regular fractals can be constructed by
changing the vertices originally taken into account and adapting the process of taking the mid-
r.
zn+1
point to a more general compression ratio
This
means that the distance of a new point
from
1
r of the distance from
the previous point zn to that vertex. So for the
the appropriate vertex is
chaos game the compression ratio was
r = 2.
For
example, taking your vertices as the four vertices
of a square and the four midpoints of their sides
Figure 29: The Sierpi«ski car-
and compression ratio 3, the Sierpi«ski carpet can
pet after 4 iterations
be produced [30].
6
An Application:
Modelling stock prices through fractal times series
Fractal geometry and generated fractals have many applications in modelling natural
phenomena. As in Figure 5 on Page 11, we have seen how fractal dimension can be used
to study coastlines. It can be used in looking at the shapes of clouds [5, p.501] and to
draw articial landscapes and moonscapes [8, p.127]. I am going to focus on one specic
example of how fractals can model times series.
There are a great many geometric similarities between the graph of a time series and
charts of coastlines [13, p.51].
Most importantly, they are both innitely detailed; the
graph of a time series over the course of one day often looks very similar to the graph for
the entire year [28, p.126][13, p.47] and as you zoom in on a coastline you will only discover
more inlets and crevices. This property means that the length of a coastline or a time
series graph can not be measured as it will be innite and that a fractal dimension will
provide more useful information as to the nature of the shape. The set of time series that
I will focus on are stock prices, though much of the theory that follows can be applied to
examples of times series in other elds, such as meteorology (daily rainfall/temperature)
and sociology (employment/crime gures).
The ultimate goal of studying stock prices with fractal techniques is to be able to comment
on the behaviour of actual stocks and how they might behave in the future.
We shall
rst consider how we can generate models for a stock price over time with a deterministic
algorithm, then move on to a simple randomised algorithm. The material in this section
is based upon the ideas outlined in `The (mis)Behaviour of Markets' [8], `Fractal Market
Analysis' [29] and online Yale classes written by Mandelbrot [31].
6.1 Introduction to Brownian Motion
Brownian motion was rst used as a mathematical model for the stock market by Louis
Bachelier [8, p.9]. The term is named after Robert Brown who rst observed the motion
when examining pollen grains in water and in mathematical physics is often called the
Wiener process [28, p.140]. Brownian motion describes random movements and in one
dimension it describes a random walk with stationary independent increments. As it behaves randomly, it is a good place to start when trying to model something unpredictable
like stock prices.
Here are some key properties of Brownian motion that we'll try to
replicate in our modelling [32]:
33
Independent increments
Each change in price is independent of any previous price
changes so there is no need to look at historical charts of the stock price.
Stationarity
The process generating the price increments remains the same over time.
This means that if our stock price is modelled by
increment
S(t + h) − S(t)
Normal increments
is independent of
S(t)
then for all
h > 0
the
t.
S(t + h) − S(t) follow a normal distribution with
√
h i.e. [S(t + h) − S(t)] ∼ N (0, h).
√
Self-anity The changes of stock price S(t) scale proportional to t. In other words,
for any u ∈ R and any s, t > 0 the probability of an increment being less than u
is equal to the probability of the same increment, but with time scaled by s, being
√
√
s · u i.e. P (S(t + h) − S(t) < u) = P (S(s · (t + h)) − S(s · t) < s · u).
less than
mean
0
Price changes
and standard deviation
In reality, stock price changes are more complicated than the Brownian motion model
so it is important to be aware that these are assumptions for our model, not underlying
properties of stock prices. In fact, as Mandelbrot points out, the assumption of normal
increments is contradicted by the facts i.e. actual stock price data do not demonstrate
this property [8, p.87].
6.2 Basic model of Brownian Motion
Now we will look at a process for modelling Brownian motion which is described in `The
(mis)Behaviour of Markets' [8, p.119] and Mandelbrot's Yale classes. We begin with a
general trend for our stock price over time (the initiator)- a line connecting
(1, 1).
A generator consisting of three line segments, with turning points
(a, b)
(0, 0) to
(c, d),
and
is then inserted along the straight trend line, as seen in Figure 30. The locations of these
turning points can be determined if we consider the self-anity of Brownian motion. If
√
dti then we require |dSi | = dti so that the
4 2
5 1
scaling mirrors that of Brownian motion. Let (a, b) = ( , ) and (c, d) = ( , ) [8, p.172]
9 3
9 3
then we have the required relationship for each i = 1, 2, 3 as seen in Table 3:
dSi
represents the change in price over time
i
1
2
3
dti
−0=
− 49 =
1 − 59 =
4
9
5
9
4
9
1
9
4
9
dSi
− 0 = 23
1
2
1
3 − 3 = −3
1
2
1− 3 = 3
2
3
Relationship
√
dS1 = 23 = dt1 = 49
√
−dS2 = 13 = dt2 = 91
√
dS3 = 23 = dt3 = 49
Table 3: Ensuring the self-anity of Brownian motion for our generator
34
Figure 30: The generator for our Brownian motion model
Once we have our generator, we replace each line segment with a scaled copy of the
generator and iterate the process to produce a model of a stock price path, as seen in
Figure 31.
Figure 31: The chart for a stock price after 2, 3 and 10 iterations of our model, created
from my MATLAB code
stockSim.m
(see Appendix A.7)
This model, however, is far too regular to represent natural Brownian motion.
True
Brownian motion contains aspects of unpredictability and randomness, so we need to try
and introduce this to our model.
35
6.3 Randomised model of Brownian motion
One way to randomise this model is to change the order of the three line segments, which
form the generator, based on a pseudorandom number given by a computer. From our
basic model we will denote the three line segments
downward slope, and
U2 ,
the second upward slope.
permutations, but in our case
U1
and
U2
U1 ,
the rst upward slope,
D,
the
These 3 line segments allow for 6
are identical in length and gradient (see Table
U = U1 = U2 and are left with only
U DU , U U D and DU U . We can now adapt the algorithm
with either U DU , U U D or DU U , each with probability
3), so we will simplify our model by introducing
three possible permutations:
by replacing a line segment
1
3 , based on the pseudorandom number generated. This provides an innite number of
possible model stock paths connecting (0, 0) and (1, 1), each an example of Brownian
motion with an upward trend, known as upward drift.
This randomisation makes the
stock price charts look more realistic [8, p.120]. In Figure 32 we can see an example of a
chart produced with this randomised algorithm:
Figure 32: A randomised Brownian Motion stock price chart, created from my MATLAB
code
stockSimR.m
(see Appendix A.8)
Here I have specied the initial trend of the stock before randomising the uctuations
in its price, but more complicated models with undetermined trends can be produced by
investors [8, p.120]. These models are run many times and allow the investor to predict
the potential gains and risks from his portfolio and to act (buy or sell stock) accordingly.
6.4 The Hurst Exponent and R/S Analysis
We are now going to move away from simulating stock prices and look into how real market
data can be analysed. We will disregard the assumption that price changes are normally
distributed as this is considered to be unrealistic and additionally we will not assume
that the price changes are identically distributed. The implications of these changes to
the model in the real world are that investors may wait until a trend is conrmed before
36
reacting to market changes, rather than reacting immediately as Brownian motion would
imply [13, p.61]. So, if stock price decreases, some investors will wait to conrm the trend
before selling their stock, which will further decrease the stock price. By not assuming
identically distributed price changes we allow investors to behave dierently at dierent
times.
We move away from random walks to biased random walks, which Mandelbrot
called fractional Brownian motions.
This move from traditional Brownian motion to
fractional Brownian motion and the statistics we can calculate to analyse the nature of
stock price data are covered in chapter 4 of `Fractal Market Analysis' [29].
The main
statistic we will need to consider is the Hurst exponent.
The Hurst exponent,
H,
is a statistic named after Harold Hurst and Ludwig Hölder [8,
p.187] used to describe the bias of a biased random walk.
R/S analysis) denes
H
Rescaled range analysis (or
through the power law [13, p.63]
(R/S)t = C · tH
(6.1)
C is a constant and t is the number of observations being taken into account,
0 < t ≤ N the total number of observations. (R/S)t is calculated as follows [33]:
where
1. For the time series
X = X1 , X2 , ...XN
2. The mean adjusted values
the mean value
Yi = Xi − X̄ , i = 1, .., N ,
X̄ =
1
N
PN
i=1
Xi
is calculated.
are calculated.
3. A cumulative series of the mean adjusted values is calculated as
Zt =
Pt
i=1
Yi ,
t = 1, .., N .
4.
Rt = max(Z1 , Z2 , .., Zt ) − min(Z1 , Z2 , .., Zt ), t = 1, .., N ,
the range series of the
Z
values is calculated.
q P
t
2
St = 1t i=1 (Xi − µ) , t = 1, .., N ,
X1 to Xt .
5. The standard deviation series
where
µ
is the mean value of
6. Finally, the rescaled range series
(R/S)t = Rt /St
is formed for
is calculated,
t = 1, .., N .
The value of the Hurst exponent shows the dependence of the next time series value on
the previous value. For investors, this describes the volatility of the stock, which means
how drastically the stock price is likely to change. The critical regions for
H
are dened
below.
Denition 6.1.
The Hurst exponent
H ∈ [0, 1] describes the interdependance of intervals
as follows:
persistent
1
fractional Brownian motion, which shows evidence of long
2 gives
term memory in the time series.
• H >
• H=
1
2 gives standard Brownian motion as we saw in Section 6.1.
• H<
1
fractional Brownian motion. Also referred to as
2 gives
, the series is likely to jump to the other side of the mean at the next time
reverting
anti-persistent
mean-
step.
Trends are apparent [13, p.65] in nancial data that stock prices are persistent series.
This is intuitive as investors are likely to sell a stock if its value is decreasing, causing
a persistent downward trend.
An anti-persistent stock price series would imply that
investors were inclined to sell stock if its value looked to be increasing and then to buy
stock when it appears to be losing its value, which goes against common sense.
37
We can estimate the Hurst exponent by nding the slope of the log-log graph of
against
t,
R/S
as taking logarithms of (6.1) gives:
log(R/S) = H · log t + log C
(6.2)
6.5 Do actual stocks behave in a fractal way?
To see how these concepts can be applied to real stock price charts, I'll consider stock
price data for BP (British Petroleum plc). I have sourced daily stock price data for BP
from 3rd January 1977 to 28th February 2011 from
http://finance.yahoo.com/
[34].
Figure 33: Stock price charts for BP over dierent time periods
I produced charts for the stock price over 4 dierent periods: one month, one year, 5
years and the full 34 years. Using MATLAB I then calculated estimates for the fractal
dimensions of these charts.
38
From
To
Length of Time Period
Estimate for Fractal dimension
3rd Jan 1977
31st Jan 1977
1 month
1.12
3rd Jan 1977
30th Dec 1977
1 year
1.19
3rd Jan 1977
31st Dec 1981
5 years
1.26
3rd Jan 1977
28th Feb 2011
34 years
1.33
Table 4: Fractal dimensions of BP stock price charts
The theory [13, p.47] suggests that these fractal dimensions should all be equal, as a stock
price chart behaves the same over the period of a day as over several years.
However,
since I was only able to nd historic stock price data with the stock price recorded once
each day, the data is not innitely detailed.
By excluding any uctuations that occur
on a minute to minute basis, the fractal dimension of short time periods is lowered as
the the stock price data looks more like a straight line. This can be seen in Figure 33
in the rst chart for stock prices in January 1977, where the straight line segments are
clear and there are fewer uctuations than one would expect if the data had been more
detailed. This explains why the fractal dimension in the table appears to be increasing as
the time period is increased. We can, however, conrm that this example exhibits fractal
behaviour as all the dimensions calculated are greater than 1.
In order to look at the Hurst exponent of this real world data, I am going to use a
piece of MATLAB code written by Bill Davidson [35]. The code takes a vector of time
X, and then calculates all the Zt for t = 1, 2, 4, 8..., t < length(X). It
R/S and uses the polyfit function in MATLAB to t a straight line for
log(R/S) against log t. The gradient of this straight line is then given as the estimated
series values,
then calculates
Hurst exponent of the time series. The BP data from 1977 to 2011 has a Hurst exponent
H = 0.96
and is therefore clearly an example of a persistent time series, as the theory
suggested a stock price chart would be.
In this section we have learnt about how stock price paths can be simulated for the future,
allowing investors or banks to model their potential gains and try to alleviate risk. The
Hurst exponent was also introduced and allows investors to steer clear of more volatile
stocks (those with a lower Hurst exponent) when building a portfolio. I will now return
to looking at fractals more generally and consider possible 3D fractals.
39
7
Producing my 3D shape
7.1 Choosing my shape
So far I have looked at many examples of 2-dimensional fractals.
We have seen the
Cantor Set, Apollonian Gasket, Sierpi«ski Gasket, T-Square fractal and Koch curve. The
algorithms for each of these 2D fractals could be adapted to produce a 3-dimensional
equivalent object. However, when considering producing a 3D object with the help of the
ZPrinter 650 there are a few extra constraints which I need to take into account:
1. The shape should be one connected mass, so that separate parts do not get lost.
2. The shape should be structurally sound and strong. Weak vertices should be avoided
as this could cause the shape to break after printing.
3. The shape should not contain very small holes as these cannot be coated properly
with glaze in the post-printing stage (described later in Section 7.4).
The Cantor Set and Sierpi«ski Gasket have well known 3-dimensional counterparts, the
Cantor Dust and Sierpi«ski Sponge.
As you can see in Figure 34, these would not be
appropriate as a printed 3D model as the Cantor dust disregards condition 1 and the
Sierpi«ski sponge contains many weak points where the tetrahedra join, which contradicts
condition 2. Interestingly the Sierpi«ski sponge is an example of a fractal object with an
integer fractal dimension. As it is made up of 4 copies of itself scaled by a factor of
has similarity dimension
dimS =
log 4
log 2
=
2·log 2
log 2
1
2 , it
= 2.
Figure 34: Cantor Dust and Sierpinski Sponge, produced from my MATLAB code and
photographed in MeshLab
The T-Square fractal is also not a good candidate as the 2-dimensional version of the TSquare fractal expands at each stage to ll the entire square. So a 3-dimensional version
would evolve eventually to ll the entire cube and would not produce a very interesting
3D model. 3-dimensional versions of the Apollonian gasket exist but they would be very
delicate as any of the spheres producing them could break o as they would only be joined
to each other sphere at one point.
40
I am therefore going to consider creating a 3-dimensional equivalent to the Koch snowake,
which is formed by connecting 3 Koch curves as seen in Figure 35. To do this, I intend to
start with a tetrahedron and attach a smaller tetrahedron to each face. At the next stage
I will add yet smaller tetrahedra to the visible faces of the four recently added tetrahedra
and will then continue this procedure with the visible faces of the added tetrahedra. The
traditional Koch snowake adds equilateral triangles to each side which are one third of
the size of the line itself. However, to prevent the added tetrahedra from becoming too
small (and thus less visible on a 3D model), I will scale them to be one half of the size of
the tetrahedra in the previous stage.
Figure 35:
The Koch Snowake after 4 iterations and its formation from three Koch
curves
7.2 Programming the algorithm in MATLAB
My MATLAB code, as seen in Figure 36, is split into 3 functions: one which initiates
the iterative process with the vertices of an initial tetrahedron, one which carries out the
iterative procedure until the specied stage `iteration' is reached and a simple function
which draws the tetrahedra using the
patch
function.
41
function koch_3D(iteration)
%define the vertices of the original tetrahedron
a=[0 0 0];b=[1 0 0];c=[1/2 sqrt(3)/2 0];d=[1/2 sqrt(3)/6 sqrt(3)/2];
tetrahedron(a,b,c,d);
%side is a matrix of visible faces defined by their vertices
sides=[a c b
b c d
c a d
d a b];%order must be clockwise for outward pointing norm
iter(sides,1,iteration);
axis equal
end
%an iterative function which adds tetrahedra to visible faces until
%the desired depth 'iteration' is reached
function iter(sides,i,iteration)
d=size(sides);
if i<=iteration
temp=[];
for j=1:d(1,1)
%define vertices of side
a=sides(j,1:3);
b=sides(j,4:6);
c=sides(j,7:9);
%define vertices of new pyramid
d=a+(b+(c-b)/2-a)*(1/3);
e=d+(b-a)/2;
f=d+(c-a)/2;
%g is defined using the outward pointing norm
g=a+(b+(c-b)/2-a)*(2/3)...
+cross(b-a,c-a)/norm(cross(b-a,c-a),2)*sqrt(3)/2*norm(e-f,2);
tetrahedron(d,e,f,g);
%matrix of new visible faces produced by adding tetrahedra
temp=[temp
d e g
e f g
f d g];%once again ordered clockwise
end
iter(temp,i+1,iteration);
end
end
%draws a tetrahedron with vertices a, b, c & d
function tetrahedron(a,b,c,d)
faces=[1 4 3; 2 3 4; 1 2 4; 1 2 3];
vertices=[a(1,1) a(1,2) a(1,3);
b(1,1) b(1,2) b(1,3);
c(1,1) c(1,2) c(1,3);
d(1,1) d(1,2) d(1,3)];
patch('Faces',faces,'Vertices',vertices,'FaceColor','y');
end
Input argument "iteration" is undefined.
Error in ==> koch_3D at 10
iter(sides,1,iteration);
Figure 36: My MATLAB code
koch_3D.m
The main challenge I had to consider when writing this code was ensuring that new
tetrahedra always pointed outwards.
1To achieve this, I had to pay close attention to
the order in which I stored the vertices of sides, to which I wanted to add a smaller
tetrahedron.
Once the vertices were stored in clockwise order, i.e.
37, I could use norms to dene the coordinates of
tetrahedron.
42
g
a, c, b
in Figure
and the other vertices of the new
d=a+
1
3
c−b
2
b+
−a
e=d+
1
2
(b − a)
f =d+
1
2
(c − a)
g =a+
2
3
b+
c−b
2
√
+
3
2
ke − f k ·
−a
(b−a)×(c−a)
k(b−a)×(c−a)k
Figure 37: Adding a tetrahedron
Below in Figure 38 you can see how the shape will look after 6 iterations. The shape fulls
each of the conditions I set out in Section 7.1. The construction is also fairly dicult to
visualise without a computer, so the shape lends itself well to being produced as a 3D
model for demonstration purposes.
Figure 38: MATLAB's rendering of my 3D Koch snowake after 6 iterations
Unfortunately MATLAB cannot calculate the box-counting dimension for 3-dimensional
objects so the dimension of my object remains unknown.
For each of the faces of the
1
2 but these do
not make up the entire shape so the similarity dimension cannot be used either. In order
original tetrahedron there are 3 copies of the face scaled by a factor of
to calculate the box-counting dimension for 3D objects a new piece of code would need
to be written which could consider how many cubes of side length
to contain a 3-dimensional shape.
r
would be required
I would suggest that the object be stored as a 3-
dimensional matrix of ones and zeros, where a one represents the presence of part of the
object. Obviously, the larger the matrix could be made, the better the estimate for the
43
fractal dimension would be but the main diculty I foresee in producing such a piece
of code is the transformation of 3-dimensional le types, such as an OBJ le which I
introduce in Section 7.3, into such a matrix. The triangular nature of my shape would
be particularly hard to replicate in a rectangular matrix.
7.3 Producing an OBJ le
An OBJ le describes 3D objects by the vertices and faces of their components. Each
g component1 and then its vertices (x1, y1, z1) are
v x1 y1 z1. Once all the vertices of the component have
component is introduced by a line
listed on separate lines with
been listed the faces can be described in relation to the vertices which they connect. The
vertices are given negative numbers in reverse order i.e. the last vertex listed is -1, the
one before that -2 and so on. A face connecting the nal three vertices of the list could
then be described as
f -1 -2 -3.
Once all the faces have been entered you move onto
the next component, introducing it with
g component2
etc.
As I have programmed my shape in MATLAB I need to produce some code that will write
OBJ les directly from MATLAB where I already have the relevant vertices and faces
stored. In order to achieve this I require two key MATLAB commands: one to create or
open a le and one to write to the end of a le. You can open a writable le with the name
fileID=fopen('file.obj','w') where the `w' represents the
fileID now contains a reference to the le so that it
This is done using the command fprintf(fileID,'text to print')
le.obj using the command
fact that the le should be writable.
can be written to.
which can also be adapted to give numbers in a specic format, for example to a certain
number of decimal places, see the
writeShape
function in my code. Figure 39 shows my
nal MATLAB code to write an OBJ le using the commands I have just introduced and
some functions adapted from my MATLAB code
44
koch_3D.m.
function write_OBJ(destination,vertices,faces)
fileID=fopen(destination,'w');
if nargin>1
writeShape(fileID,vertices,faces);
else
koch3D(6,fileID);
end
end
function writeShape(fileID, vertices, faces)
fprintf(fileID,'g shape\r\n');
n=size(vertices);
for i=1:n(1,1)
fprintf(fileID,'v');
for j=1:n(1,2)
fprintf(fileID, ' %6.4f',vertices(i,j));
end
fprintf(fileID,'\r\n');
end
faces=faces-(n(1,1)+1);
d=size(faces);
for i=1:d(1,1)
fprintf(fileID,'f');
for j=1:d(1,2)
fprintf(fileID, ' %i',faces(i,j));
end
fprintf(fileID,'\r\n');
end
end
%%%%%%%% Editted functions from koch_3D.m %%%%%%%%
function koch3D(iteration,fileID)
a=[0 0 0];b=[1 0 0];c=[1/2 sqrt(3)/2 0];d=[1/2 sqrt(3)/6 sqrt(3)/2];
pyramid(a,b,c,d,fileID);
sides=[a c b
b c d
c a d
d a b];
iter(sides,1,iteration,fileID);
end
function iter(sides,i,iteration,fileID)
d=size(sides);
if i<=iteration
temp=[];
for j=1:d(1,1)
a=sides(j,1:3);
b=sides(j,4:6);
c=sides(j,7:9);
d=a+(b+(c-b)/2-a)*(1/3);
e=d+(b-a)/2;
f=d+(c-a)/2;
g=a+(b+(c-b)/2-a)*(2/3)...
+cross(b-a,c-a)/norm(cross(b-a,c-a),2)*sqrt(3)/2*norm(e-f,2);
pyramid(d,e,f,g,fileID);
temp=[temp;d e g;e f g;f d g];
end
iter(temp,i+1,iteration,fileID);
end
end
function pyramid(a,b,c,d,fileID)
faces=[1 4 3; 2 3 4; 1 2 4; 1 2 3];
vertices=[a(1,1) a(1,2) a(1,3);
1
b(1,1) b(1,2) b(1,3);
c(1,1) c(1,2) c(1,3);
d(1,1) d(1,2) d(1,3)];
writeShape(fileID,vertices,faces);
end
Input argument "destination" is undefined.
Error in ==> write_OBJ at 2
fileID=fopen(destination,'w');
Figure 39: MATLAB code
Published with MATLAB® 7.9
45
write_OBJ.m
The OBJ le produced has 13,113 lines but here is an exert from the start of the le
which denes the rst three tetrahedra:
g
v
v
v
v
f
f
f
f
g
v
v
v
v
f
f
f
f
g
v
v
v
v
f
f
f
f
shape
0.0000 0.0000
1.0000 0.0000
0.5000 0.8660
0.5000 0.2887
-4 -1 -2
-3 -2 -1
-4 -3 -1
-4 -3 -2
shape
0.2500 0.1443
0.5000 0.5774
0.7500 0.1443
0.5000 0.2887
-4 -1 -2
-3 -2 -1
-4 -3 -1
-4 -3 -2
shape
0.8333 0.1925
0.5833 0.6255
0.5833 0.3368
1.0369 0.5987
-4 -1 -2
-3 -2 -1
-4 -3 -1
-4 -3 -2
0.0000
0.0000
0.0000
0.8660
0.0000
0.0000
0.0000
-0.4330
0.1443
0.1443
0.5774
0.4312
To view my OBJ le I have used
MeshLab [36], an open-source 3D
modelling program.
MeshLab al-
lows you to view your object from
every angle and to take snapshots
of the object with realistic shadows.
My shape after 6 iterations, photographed in MeshLab can be seen
in Figure 40. It is now ready to be
printed.
Figure 40: My 3D Koch snowake after 6 iterations
46
7.4 Printing with the ZPrinter 650
Before nalising my design, I met with Dr. Andrew Hatch of Durham's Computer Science department to see the printer and hear how the
technology works.
The printing process begins by importing the 3D
object into the ZPrint software, which slices the
object into thin cross-sectional slices, which are
passed on to the printer [37].
The printer then
creates the model layer by layer. It does this by
spreading a thin layer of powder across the printing tray, labelled A in Figure 41, and then inkjet
printing the current cross-section onto this thin
layer, which binds the powder. When all the layers have been printed, the 3D object is placed in
compartment B and the excess powder is removed
Figure 41: ZPrinter 650
from the model, which is then recycled. The 3D
model is then glazed to protect it from wear and
tear and to bring out the colours.
After looking at some models Dr. Hatch had already produced, I decided my model would
be sturdier if I only printed a model of my shape after 4 iterations. This will show how
the shape is constructed without having tiny tetrahedra on the model which may break
o. In Figure 42 you can see my nal object which will see sent to the printer.
Figure 42: My 3D Koch snowake after 4 iterations
47
7.5 The nal product
Figure 43 shows my object after printing. In the right-hand image you can see the surface
of the model close up. The lines across the surface show how the layers were printed one
at a time and in the grooves of the model you can see the shine of the glaze. The model is
now ready to act as a teaching aid in a mathematics lecture on fractals, allowing students
to see what fractals look like in 3 dimensions, as well as to visualise this specic structure.
Figure 43: The nal object and a close-up of the surface texture
8
Conclusion
This project has covered aspects of fractal geometry and fractal construction alongside
how to program fractals in MATLAB and to write these as an OBJ le. Firstly, we saw
the denitions of the similarity, box-counting and Hausdor dimension and familiarised
ourselves with how to calculate the box-counting dimension of 2D objects by hand and
using MATLAB. We then looked at contraction mappings and metric spaces. This allowed
us to produce regular fractals with IFS and we saw how these could be expressed concisely
in tables. In order to understand the construction of Apollonian gaskets, some aspects of
circle geometry, namely tangency, Soddy circles and Descartes' Theorem, were introduced.
These allowed the radius and centre of the next iteration of circles to be calculated and
consequently the circles to be removed from an Apollonian gasket. After some examples
of fractals and a closer look at their properties, we began to look at randomised fractals
with the intention that these could better model real world situations. The real world
situation that we focussed on was stock price charts.
I showed that these do indeed
display fractal behaviour and how their behaviour emulates fractional Brownian motion.
Finally, I set about deciding on an object to print, bearing in mind the restrictions of the
3D printer and programmed the 3D Koch snowake in MATLAB. From this, I wrote my
own code to write an OBJ le which was sent to the printer.
48
8.1 Acknowledgements
I would like to take this opportunity to thank Dr. James Blowey for his support throughout and the initial idea for the project and Dr. Andrew Hatch for his advice and time
spent producing my 3D object with the ZPrinter 650.
49
References
[1] Benoît Mandelbrot.
[2]
The Fractal Geometry of Nature.
W. H. Freeman, 1983.
The Economist: Obituary of Benoît Mandelbrot.
http://www.economist.com/node/17305197.
[3]
BBC Four: The Secret Life Of Chaos.
http://www.bbc.co.uk/programmes/b00pv1c3.
[4] Paul S Addison.
Fractals and Chaos.
IOP Publishing Ltd., 1997.
[5] Hartmut Jürgens & Dietmar Saupe Heinz-Otto Peitgen.
Frontiers of Science.
[6] Kenneth Falconer.
Chaos and Fractals: New
Springer Verlag, 1992.
Fractal Geometry: Mathematical Foundations and Applications.
John Wiley & Sons Ltd, 1990.
[7] Kenneth Falconer.
Techniques in Fractal Geometry.
[8] Benoît B. Mandelbrot.
ruin, and reward.
[9]
John Wiley & Sons, 1997.
The (mis)Behaviour of Markets: A fractal view of risk,
Prole Books Ltd, 2004.
Yale Classes: Moran Equation.
http://classes.yale.edu/fractals/FracAndDim/Moran/Moran.html.
[10]
Yale Classes: Moran Equation Example.
http://classes.yale.edu/fractals/FracAndDim/Moran/MoranExCAns.html.
[11]
Wikipedia: Box-counting dimension.
http://en.wikipedia.org/wiki/Minkowski%E2%80%93Bouligand_dimension.
[12]
MATLAB Central: Box-count.
http://www.mathworks.com/matlabcentral/leexchange/13063-boxcount.
Chaos and Order in the Capital Markets: A New View Of Cycles,
Prices, and Market Volatility. John Wiley & Sons, 1991.
[13] Edgar E. Peters.
[14]
Wolfram Mathworld: Boxcounting Dimension.
http://mathworld.wolfram.com/Minkowski-BouligandDimension.html.
[15] Michael Barnsley.
Fractals Everywhere.
Academic Press, Inc., 1988.
[16] Dana McKenzie. A tisket, a tasket, an apollonian gasket.
American Scientist, 98,
2010.
[17] Colin L. Mallows & Allan R. Wilks Jerey C. Lagarias. Beyond the descartes circle
theorem.
The American Mathematical Monthly, 109:338361, 2002.
[18] Paul Bourke. An introduction to the apollonian fractal.
Technology.
[19] Julian Lowell Coolidge.
A Treatise On The Circle And The Sphere.
University Press, 1916.
[20]
Swinburne University of
Wolfram Mathworld: Soddy Circles.
http://mathworld.wolfram.com/SoddyCircles.html.
50
Oxford
[21] Daniel Pedoe. On a theorem in geometry.
The American Mathematical Monthly,
47:627640, 1967.
[22] Frederick Soddy. The kiss precise.
[23]
Nature, 137:1021, 1936.
Wikibooks: Apollonian Fractals.
http://en.wikibooks.org/wiki/Fractals/Apollonian_fractals.
[24] D. Boyd. The residual set dimension of the apollonian packing.
Mathematika,
20:170174, 1973.
Hausdor dimension and conformal dynamics III:
Computation of dimension. Harvard, 1997.
[25] Curtis T McMullen.
[26]
Wolfram Mathworld: Sierpinski Sieve.
http://mathworld.wolfram.com/SierpinskiSieve.html.
[27] Sime Ungar. The koch curve: A geometric proof.
Monthly, 114:6166, 2007.
[28] Manfred Schroeder.
Paradise.
Fractals, Chaos, Power Laws: Minutes from an Innite
W. H. Freeman and Company, 1991.
[29] Edgar E. Peters.
and Economics.
Fractal Market Analysis: Applying Chaos Theory to Investment
John Wiley & Sons, 1994.
[30] Robert L. Devaney. Chaos rules!
[31]
The American Mathematical
Math Horizons, 12:1114, 2004.
Yale Classes: Fractals and the Stock Market.
http://classes.yale.edu/fractals/RandFrac/welcome.html.
[32]
Yale Classes: Mathematical Properties of Brownian Motion.
http://classes.yale.edu/fractals/RandFrac/Brownian/Brownian4.html.
[33] Bo Qian & Khlaed Rasheed. Hurst exponent and nancial market predictability. In
IASTED conference on "Financial Engineering and Applications"(FEA 2004),
pages 203209, 2004.
[34]
[35]
Yahoo Finance: BP.
http://nance.yahoo.com/q/hp?s=BP+Historical+Prices.
MATLAB Central: Hurst Exponent.
http://www.mathworks.com/matlabcentral/leexchange/9842.
[36]
MeshLab.
[37]
ZPrinter Brochure.
http://meshlab.sourceforge.net/.
http://www.zcorp.com/documents/931_9062-ZPrinterBroch.pdf.
51
A
Appendix
A.1 sierpinski.m
%draws a sierpinski triangle to stage 'iteration'
function sierpinski(iteration)
%use triangle iteration method starting with the corners of an equilateral
%triangle and depth 0.
triangleIter(0,0,.5,sqrt(3)/2,1,0, 0 ,iteration);
axis equal
axis off
function triangleIter(x1,y1,x2,y2,x3,y3,depth,iteration)
%if the desired depth has been reached draw the triangle
if depth==iteration
patch([x1 x2 x3],[y1 y2 y3],'o');
%otherwise continue iteratively for 3 smaller triangles and depth+1
else
x12=(x1+x2)/2; y12=(y1+y2)/2;
x23=(x2+x3)/2; y23=(y2+y3)/2;
x31=(x3+x1)/2; y31=(y3+y1)/2;
triangleIter(x1,y1,x12,y12,x31,y31,depth+1,iteration);
triangleIter(x12,y12,x2,y2,x23,y23,depth+1,iteration);
triangleIter(x31,y31,x23,y23,x3,y3,depth+1,iteration);
end
Input argument "iteration" is undefined.
Error in ==> sierpinski at 5
triangleIter(0,0,.5,sqrt(3)/2,1,0, 0 ,iteration);
Published with MATLAB® 7.9
1
52
A.2 tsquare.m
%Creates a T square fractal with 'iteration' iterations
function tsquare(iteration)
%the third coordinates are equal to one to show that these
%initial corners point outwards
corners = [0.5 0.5 1;0.5 1.5 1;1.5 1.5 1;1.5 0.5 1];
for i=1:iteration
dim=size(corners); %dim(1,1) represents no. corners from previous step
temp = [];
length = 2^(-i-1);
for j=1:dim(1,1)
%If corner points inwards take no action and copy corner straight
%to new list
if corners(j,3)==0
temp2 = corners(j,:);
temp=[temp;temp2];
%Otherwise follow the procedure to create P, Q, R, S and T
else
%Case when looking at the first corner, A in this case is the
%last corner on the list
if j-1==0
A=corners(dim(1,1),:);
else A= corners(j-1,:);
end
%Case when looking at the last corner, B in this case is the
%first corner on the list
if j+1==dim(1,1)+1
B= corners(1,:);
else B= corners(j+1,:);
end
C= corners(j,:);
AC = C-A;
BC = C-B;
%5 new corners formed from each previously outward pointing one
P= C - length*AC/max(abs(AC(1,1)),abs(AC(1,2)));
Q= C - length*AC/max(abs(AC(1,1)),abs(AC(1,2)))...
+ length*BC/max(abs(BC(1,1)),abs(BC(1,2)));
R= C + length*AC/max(abs(AC(1,1)),abs(AC(1,2)))...
+ length*BC/max(abs(BC(1,1)),abs(BC(1,2)));
S= C + length*AC/max(abs(AC(1,1)),abs(AC(1,2)))...
- length*BC/max(abs(BC(1,1)),abs(BC(1,2)));
T= C - length*BC/max(abs(BC(1,1)),abs(BC(1,2)));
temp2 = [0 0 0;0 0 0;0 0 0;0 0 0;0 0 0];
temp2(1,1)=P(1,1); temp2(1,2)=P(1,2); temp2(1,3)=0;
temp2(2,1)=Q(1,1); temp2(2,2)=Q(1,2); temp2(2,3)=1;
temp2(3,1)=R(1,1); temp2(3,2)=R(1,2); temp2(3,3)=1;
temp2(4,1)=S(1,1); temp2(4,2)=S(1,2); temp2(4,3)=1;
temp2(5,1)=T(1,1); temp2(5,2)=T(1,2); temp2(5,3)=0;
temp=[temp;temp2];
end
end
corners = temp;
end
patch(corners(:,1),corners(:,2),'b')
axis([0 2 0 2]);
axis equal;
axis off;
Input argument "iteration" is undefined.
Error in ==> tsquare at 6
for i=1:iteration
1
53
A.3 sierpinskiR.m
%draws a randomised sierpinski triangle to stage 'iteration'
function sierpinskiR(iteration)
%use triangle iteration method starting with the corners of an equilateral
%triangle and depth 0.
triangleIter(0,0,.5,sqrt(3)/2,1,0, 0 ,iteration);
axis equal
axis off
function triangleIter(x1,y1,x2,y2,x3,y3,depth,iteration)
%if the desired depth has been reached draw the triangle
if depth==iteration
patch([x1 x2 x3],[y1 y2 y3],'b');
%otherwise continue iteratively for 3 smaller triangles and depth+1
else
%three random numbers are generated between 0 and 1
r1=rand;
r2=rand;
r3=rand;
%these are used to define the vertices of the removed centre triangle
x12=x1*r1+(1-r1)*x2; y12=y1*r1+(1-r1)*y2;
x23=x2*r2+(1-r2)*x3; y23=y2*r2+(1-r2)*y3;
x31=x3*r3+(1-r3)*x1; y31=y3*r3+(1-r3)*y1;
triangleIter(x1,y1,x12,y12,x31,y31,depth+1,iteration);
triangleIter(x12,y12,x2,y2,x23,y23,depth+1,iteration);
triangleIter(x31,y31,x23,y23,x3,y3,depth+1,iteration);
end
Input argument "iteration" is undefined.
A.4
koch.m
Error in
==> sierpinskiR
at 5
triangleIter(0,0,.5,sqrt(3)/2,1,0, 0 ,iteration);
%generates a Koch curve to stage 'iteration'
function koch(iteration)
%defines the endpoints of the curve
m=[0 0;1 0];
for i=1:iteration
Published
with MATLAB® 7.9
dim=size(m);
temp=[];
for j=1:(dim(1,1)-1)
%defines the three new corner of the triangle added at each stage
Ax=m(j,1);Ay=m(j,2);
Bx=m(j+1,1);By=m(j+1,2);
Cx=(Ax+Bx)/2-(By-Ay)/(2*sqrt(3));
Cy=(Ay+By)/2+(Bx-Ax)/(2*sqrt(3));
%adds these to a temporary matrix of corners
temp2=[Ax Ay
(Bx+2*Ax)/3 (By+2*Ay)/3
Cx Cy
(2*Bx+Ax)/3 (2*By+Ay)/3];
temp=[temp;temp2];
end
temp=[temp; 1 0];
%the matrix of corners is saved for the next iteration
m=temp;
end
plot(m(:,1),m(:,2))
axis equal
axis off
Input argument "iteration" is undefined.
Error in ==> koch at 5
for i=1:iteration
1
Published with MATLAB® 7.9
54
A.5 kochR.m
%generates a random Koch curve to stage 'iteration'
function kochR(iteration)
m=[0 0;1 0];
for i=1:iteration
dim=size(m);
temp=[];
for j=1:(dim(1,1)-1)
Ax=m(j,1);Ay=m(j,2);
Bx=m(j+1,1);By=m(j+1,2);
r=rand2();
%adds an upward pointing triangle
if r==1
Cx=(Ax+Bx)/2-(By-Ay)/(2*sqrt(3));
Cy=(Ay+By)/2+(Bx-Ax)/(2*sqrt(3));
%adds a downward pointing triangle
else
Cx=(Ax+Bx)/2+(By-Ay)/(2*sqrt(3));
Cy=(Ay+By)/2-(Bx-Ax)/(2*sqrt(3));
end
temp2=[Ax Ay
(Bx+2*Ax)/3 (By+2*Ay)/3
Cx Cy
(2*Bx+Ax)/3 (2*By+Ay)/3];
temp=[temp;temp2];
end
temp=[temp; 1 0];
m=temp;
end
plot(m(:,1),m(:,2))
axis equal
axis off
%tranforms a random number between 0 and 1 into an integer equal to
%1 or 2, each with probability 1/2.
function n = rand2()
n = ceil(rand*2 + eps);
Input argument "iteration" is undefined.
A.6
chaosgame.m
Error in
==> kochR at 4
for i=1:iteration
%runs the chaos game for 'iteration' game points starting with
%the initial point (x,y)
function chaosgame(iteration,x,y)
plot(x,y)
Published
with MATLAB® 7.9
axis
equal
axis off
hold on
for i = 1 : iteration
n = rand3();
%the coordinates of the next gamepoint are calculated according
%to the value of n
if n == 1
x = x/2;
y = y/2;
end
if n == 2
x = (x+.5)/2;
y = (y+sqrt(3)/2)/2;
end
if n == 3
x = (x+1)/2;
y = y/2;
end
1
%the new point is plotted
plot(x,y)
end
hold off
%tranforms a random number between 0 and 1 into an integer equal to
%1 or 2 or 3, each with probability 1/3.
function n = rand3()
n = ceil(rand*3 + eps);
Input argument "x" is undefined.
Error in ==> chaosgame at 4
plot(x,y)
Published with MATLAB® 7.9
55
A.7 stockSim.m
%generates a simulated stock price path, modelled by Brownian motion
function stockSim(iteration)
%the general trend (end-points) are given
m=[0 0;1 1];
for i=1:iteration
dim=size(m);
temp=[];
for j=1:(dim(1,1)-1)
Ax=m(j,1);Ay=m(j,2);
Bx=m(j+1,1);By=m(j+1,2);
%for each stage 2 new points are added between each
%of the current pair of consecutive points
temp2=[Ax Ay
(4*Bx+5*Ax)/9 (2*By+Ay)/3
(5*Bx+4*Ax)/9 (By+2*Ay)/3];
temp=[temp;temp2];
end
temp=[temp; 1 1];
m=temp;
end
plot(m(:,1),m(:,2))
Input argument "iteration" is undefined.
A.8
stockSimR.m
Error in
==> stockSim at
5
for i=1:iteration
%generates a randomised stock price path to stage 'iteration'
function stockSimR(iteration)
m=[0 0;1 1];
for i=1:iteration
dim=size(m);
Published
with MATLAB® 7.9
temp=[];
for j=1:(dim(1,1)-1)
temp2=[];
r=rand3();
Ax=m(j,1);Ay=m(j,2);
Bx=m(j+1,1);By=m(j+1,2);
%creates to new intermediary points between each pair of
%consecutive points dependent on the value of r
if r==1 %UDU
temp2=[Ax Ay
(4*Bx+5*Ax)/9 (2*By+Ay)/3
(5*Bx+4*Ax)/9 (By+2*Ay)/3];
else if r==2 %UUD
temp2=[Ax Ay
(4*Bx+5*Ax)/9 (2*By+Ay)/3
(8*Bx+Ax)/9 (4*By-Ay)/3] ;
else %DUU
temp2=[Ax Ay
(Bx+8*Ax)/9 (-By+4*Ay)/3
(5*Bx+4*Ax)/9 (By+2*Ay)/3];
end
end
temp=[temp;temp2];
end
temp=[temp; 1 1];
m=temp;
end
plot(m(:,1),m(:,2))
%tranforms a random number between 0 and 1 into an integer equal to
%1 or 2 or 3, each with probability 1/3.
function n = rand3()
n = ceil(rand*3 + eps);
1
Input argument "iteration" is undefined.
Error in ==> stockSimR at 4
for i=1:iteration
Published with MATLAB® 7.9
56