Mechatronics Experiment in a Freshman Year Course
advertisement

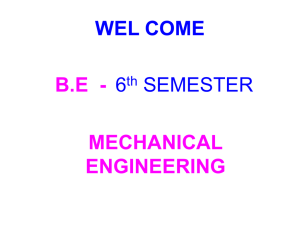
Session R1G Mechatronics Experiment in a Freshman Year Course Vinod K Lohani1, Pushkin Kachroo 2, Shripad Chandrachood 3, Tasha Zephirin 4, G V Loganathan5, and Jenny Lo6 Abstract - The paper presents design and pilot implementation of a mechatronics hands on workshop for engineering freshmen in spring 2006 at Virginia Tech, USA. This activity is part of a research/curriculum reformulation project funded by the National Science Foundation, USA. One of the strategies for the proposed reformulation is to develop activities that will engage freshman students in a variety of lab experiences that reflect different engineering disciplines. About 180 students participated in the pilot. The experiment involved building a robot using several mechanical (gears, wheels, shafts, etc.) and electrical parts (resistors, capacitors, motor driver integrated circuits, breadboard, battery, diodes, micro switches). A pre-workshop assignment was designed to assess the “prior knowledge” of students and a couple of self-explanatory PowerPoint presentations were made available to students through class Web site. Assessment data were obtained using instant classroom response system (i.e., clickers) and also by using in-class assessment worksheets. Assessment data indicates a very positive response from students. It is planned to scale up this workshop to the entire freshman engineering class of ~1200 in fall 2006. Index Terms: Assessment, Clickers, Engineering Freshman, Mechatronics INTRODUCTION Virginia Tech (VT), USA created a new Department of Engineering Education (EngE) within the College of Engineering (COE) in May 2004 to improve engineering pedagogy. The primary motivation is to promote collaboration between engineering and education faculty within and outside the university and to develop an active research program in engineering education. A number of NSF funded projects are ongoing in support of the enhanced research mission of the department. One of the projects is funded under the Department-Level Reform (DLR) program of the NSF (www.dlr.enge.vt.edu). A number of EngE faculty members are collaborating with faculty from other engineering departments and the School of Education to reform the freshman engineering program within the EngE and the bioprocess program within the Biological Systems Engineering (BSE) department using a theme based spiral curriculum approach [1]. To accomplish this, one strategy involves engaging freshman students in a variety of lab experiences that reflect different engineering disciplines. This paper discusses the design of one such experiment on mechatronics. Assessment data was obtained by employing a variety of instruments including surveys and use of clickers in class. HANDS ON EXPERINCES IN FIRST ENGINEERING COURSE All engineering freshmen at VT are required to take an introductory engineering course called “Engineering Exploration EngE1024” during freshman year. Students transfer into various eleven engineering departments after completing a set of required courses during freshman year. EngE faculty members keep up their efforts to improve the learning experiences of engineering freshmen by incorporating innovative hands on activities in this course. As a result, this course has undergone a number of revisions in last several years. A major change in teaching format of EngE1024 was piloted by the coordinators of this course (i.e., Lohani and Lo) in spring 2005 when the course was taught in a 50-min lecture in a large classroom (~150 seat) followed by a hands on workshop in a 32-seat classroom. In fall 2005, this new format was successfully implemented for the entire freshman engineering class of ~1200 students [2]. The hands on workshop activities are primarily designed to give glimpses of various engineering disciplines by incorporating early design and build experiences. In order to address the needs of all eleven engineering departments the EngE faculty are collaborating with faculty members from several engineering departments including Civil and Environmental Engineering (CEE), Electrical and Computer Engineering (ECE), Biological Systems Engineering (BSE), etc. as a part of the ongoing NSF/DLR project. 1 Vinod K. Lohani, Asso. Prof., Dept. of Engineering Education, Virginia Tech, vlohani@vt.edu Pushkin Kachroo, Asso. Prof., Electrical and Computer Eng. Dept., Virginia Tech, pushkin@vt.edu 3 Shripad Chandrachood, Ph.D. student, Electrical and Computer Eng. Dept., Virginia Tech, shripad@vt.edu 4 Tasha Zephirin, , Undergraduate student, Electrical and Computer Eng. Dept., Virginia Tech, tashaz@vt.edu 5 G V Loganathan, Prof., Dept. of Civil and Env. Engineering, Virginia Tech, gvlogan@vt.edu 5 Jenny Lo, Assist. Prof., Dept. of Engineering Education, Virginia Tech, jlo@vt.edu 2 San Juan, PR July 23 – 28, 2006 9th International Conference on Engineering Education R1G-23 Session R1G Water Tower Experiment Following sections provide details on the pilot implementation of this workshop. In summer 2005, EngE faculty designed a “water tower” experiment in collaboration with faculty from the CEE and BSE departments for the EngE1024 course. Figure 1 shows a set up for this experiment. The objectives are to give hands on experiences to observe flow of water from a cone shaped upper tank through an orifice into the lower tank and use the method of selected points for developing the empirical relationship to describe the rate of water drainage under falling head conditions. In addition, problem solving and programming exercises were designed to compute volume and surface area of a conic frustum. This experiment has been successfully implemented in EngE1024 in fall 2005 and spring 2006. Students going into departments like Civil and Environmental Engineering, Mechanical Engineering, Engineering Science Mechanics, Chemical Engineering, Biological Systems Engineering, etc. will be able to relate their first semester fluid experiences when they take upper level courses like fluid mechanics / hydraulics typically in junior year. Pre-workshop assignment A pre-experiment assignment was designed to assess the “prior knowledge” of students and a self-explanatory PowerPoint presentation explaining various associated concepts is made available to students through class Web site two weeks prior to the hands on workshop. This pre-workshop presentation included a number of basic physics, algebra, and geometry problems related to the mechatronics project and was intended to prepare students for the experiment. Since students had just completed the “water tower” experiment discussed previously, students were explained the analogy between water flow and electricity flow (see Figure 2). The assignment also explained electronic concepts such as digital logic, integrated circuits and bread boarding. Several homework questions are included for getting students ready for the hands on part of the workshop. It may be mentioned that a clicker based classroom response system was adopted in EngE1024 course to obtain instant feedback from students in fall 2005. In order to get early impressions of students about the workshop, a clicker question was asked after 5 days of assigning the preworkshop assignment. The question and students’ responses (~140 respondents) are given in brackets: FIGURE 1 WATER TOWER EXPERIMENT SET UP Piloting Mechatronics workshop in Spring 2006 In order to give meaningful experiences related to Electrical, Computer Science/ Engineering and Mechanical Engineering, a “mechatronics” workshop was developed by the authors collaboratively and was piloted in spring 2006 with ~180 students in EngE1024 course. Main objectives of this workshop are to: 1) Expose freshman engineering students to mechanical construction, electrical/electronic circuits, as well as digital circuits from computer engineering, and 2) Build and test a two-wheel driven mobile robot. The experiment involves building a robot using several mechanical (gears, wheels, shafts, etc.) and electrical parts (resistors, capacitors, motor driver integrated circuits, breadboard, battery, diodes, micro switches, etc.). Hands-on activities in the workshop included: (1) building a gear box, (2) attaching motors, wheels, battery, switches, and breadboard, (3) constructing a power supply for the robot, (4) creating circuits on the Breadboard, and (5) testing the robot. FIGURE 2 ANALOGY BETWEEN WATER FLOW AND ELECTRICITY FLOW Clicker question: Please give your initial impression about the "mechatronics" workshop we'll do after the spring break: a. I'm really excited about this workshop and am eagerly looking forward to do this hands on experiment. [22%] b. The workshop seems complex but I may enjoy it at the end. [18%] c. I'm not sure I'm too excited about this workshop at this point. [10%] d. I didn't have time to review the "mechatronics" slides and have no opinion at this point. [47%] e. Invalid response [3%] San Juan, PR July 23 – 28, 2006 9th International Conference on Engineering Education R1G-24 Session R1G Workshop Assignment Before conducting the hands on workshop, all questions from pre-workshop assignment were discussed in a 50-min lecture session in EngE1024. Again, in order to assess the impact of the lecture on the interest level of students, a clicker based question was asked in the class “before” and “after” the lecture. The question and the responses are given below: “Before” Lecture 1. I've reviewed the mechatronics slides and at this point I am: FIGURE 3 PARTS OF THE GEARBOX A. very excited about this workshop [15%] B. glad that we're doing this hands on workshop [40%] C. neutral about this workshop [14%] D. really not sure whether I'll like this workshop or not [10%] E. I haven't reviewed the slides yet [14%] G. Invalid response [ 7%] “After” Lecture 1. After attending the mechatronics lecture I am now: A. very excited about this workshop 44% B. glad that we're doing this hands on workshop 41% C. neutral about this workshop11% D. really not sure whether I'll like this workshop or not 4% FIGURE 4 ASSEMBLED GEARBOX ALONG WITH WHEELS AND DC MOTORS As can be seen, the lecture was obviously very effective in communicating the excitement associated with this new workshop. In addition to the pre-workshop slides, two additional sets of PP slides were uploaded to class Web site ahead of the workshop. These slides were used in the lecture session discussed above to cover all associated activities. These include step by step description of the robot building process. Figures 3-6 show some examples of the slides that explain the workshop activity. All electrical and mechanical parts were made available to a group of 2 students. First, students built the gearbox (see Figure 4). Then the breadboard operations were performed (see Figure 5). The electrical operations were described in three stages: Stage 1: Powering the breadboard with 9 volt battery, Stage 2: Deriving 5 volt supply from the 9 volt battery circuit, and Stage 3: Implementing motor drive circuit to control and protect the operation of robot motors (see figure 6). FIGURE 5 FAMILIARIZATION WITH THE BREADBOARD OPERATION 5V Convert: Convert: 9V 9Vtoto5V 5V Voltage Voltage Regulator Regulator Stage 1 Stage 2 Motor Motor Drive Drive Stage 3 FIGURE 6 THREE STAGE CONTROL CIRCUIT – BLOCK DIAGRAM . San Juan, PR July 23 – 28, 2006 9th International Conference on Engineering Education R1G-25 Session R1G After completing each stage students performed the required tests for testing satisfactory completion of various stages. Finally, the developed circuit and the gearbox assembly was fit on to a CD and the two-wheel driven mobile robot was ready to run by controlling its power through an input switch as shown in Figure 7. 5) Now start building electronic circuit on the breadboard following instructions given in the slides and by the GTA. Start time: ………. 6) Make sure your breadboard is oriented properly as shown in the manual (Tabs at the top). 7) Build circuit stage 1 on the breadboard. Note that for diode, red side is the positive side and that should be connected to positive of the battery Use Multimeter to test this stage. Multimeter knob should be on 20 volt DC. Checkpoint for stage 1: Turn the input switch ON. Are you getting approximately ‘9 volts’ at the stage 1 output? Yes No FIGURE 7 SNAPSHOT OF THE TWO-WHEEL DRIVEN MOBILE ROBOT WORKSHOP INSTRUCTIONS AND ASSESSMENT SHEET An instruction and assessment sheet was created to provide stepwise instructions and to obtain feedback while students did the hands on workshop. The data obtained is being tabulated at the time of this writing. It will be included in the final version of the paper. The content of this sheet are as below: Student Name(s): Workshop Day & Time: Kit identification #: 1) Gearbox kit # ……… 2) Electronic Components kit # ………… 3) Tool kit # ………….. 1) Have you ever previously worked/played with mechanical assembly type of toys? Yes No 2) Do you have any prior experience of working with breadboard or electronic components? Yes No 8) If your stage 1 output is approximately ‘9 volts’ then proceed to build stage 2 on the breadboard. Checkpoint for stage 2: Are you getting approximately ‘5 volts’ at the stage 2 output? Yes No 9) If ‘stage 2’ output is correct then create the 5 volt bus and join the two ground bus together as shown in the manual. 10) Now turn the input switch OFF and start building stage 3 on the breadboard. Once all the connections of the stage 3 are done, turn the input switch ON again. Checkpoint for stage 3: Are the gearbox motors and attached wheels revolving? Yes No 11) If everything up to stage 3 is working fine then use double sided tape to mount the gearbox and the breadboard on Compact Disc. Is your robot moving forward? Yes No End time: ………. 12) What can be done to move your robot backward? 3) Start assembling the gearbox using components from the given gearbox kit. Use a Philips head screwdriver from the tool kit for fitting screws. Follow step by step instructions provided in the gearbox assembly sheet. Start time: End time: Ans: ………………………………………………………………… ………………………. 4) Show the assembled gearbox to the GTA. Make sure all the assembly is perfect. You will need this assembled gearbox to build your robot. San Juan, PR 9th International Conference on Engineering Education R1G-26 July 23 – 28, 2006 Session R1G 13) Would it be possible to spin it clockwise around the center of the wheel axle by changing any of the connections? Yes No If Yes, which connections would you change? If No, why is it not possible? 14) How would you rate this overall Mechatronics workshop activity? Excellent Good Average Poor 15) After testing the robot, you need to disassemble everything. a) Remove the gearbox and breadboard from the CD. b) Remove the double sided tape from all the locations that you applied to. c) Disassemble the gearbox and put the components back in the gearbox kit. d) Remove all the wires (except for the ones connected to the motor) and keep aside. Don’t throw. e) Do not remove the IC from the breadboard. f) Keep all the electronic components back in to the electronic kit zip lock bag. g) Keep all the tools back in the tool kit. Do make sure everything is back in the zip lock bag kits as it was given to you at the start of the workshop (Refer item check list given to you). Your classmates would be using this same kit in the next workshop. Make it convenient for them! If anything is missing, please notify your GTA. FUNDING FROM THE STUDENT ENGINEER’S COUNCIL (SEC) Every year the Student Engineers’ Council at Virginia Tech provides funding support for undertaking innovative curriculum development projects for engineering students. Given the huge success of the mechatronics pilot, the authors submitted a proposal to the SEC for implementing the mechatronics project in entire freshman class of 1200 in fall 2006. The authors made a presentation to ~50 SEC members and were awarded $7,300 in March 2006 for continuing the project in fall 2006. It is proposed to expand the scope of the activity in fall to cover two workshop sessions. SUMMARY The mechatronics pilot workshop has been one of the very successful workshops in the first engineering course at Virginia Tech in spring 2006. It is proposed to expand the scope of this workshop in fall 2006 to include activities like sensor based movements of the robot. A proposal for the Course Curriculum and Laboratory Improvement (CCLI) program of the NSF for expanding the scope of the project is under development at the time of this writing. ACKNOWLEDGEMENT The authors of this paper would like to acknowledge the financial support of the National Science Foundation (grant number 0431779, Department-level reform program). In addition, the authors would like to express sincere thanks to Jennifer Mullin, Ricky Liao, Brian Bluhm, Shawn Batterton, and Ameet Pinto for conducting the mechatronics workshop in spring 2006. POST WORKSHOP ASSESSMENT REFERENCES Another clicker based question was asked in the class after completing the mechatronics workshop. The question and response (~120 students) are given below: Having completed the mechatronics workshop, I’ll rate this activity as: A. Excellent [35%] B. Very good [35%] C. Average [12%] D. Poor [3%] E. Don’t want to rate [5%] F. Invalid response [10%] It can be seen that a good majority of students enjoyed the mechatronics project. In April end, a focus group session and an exit survey is planned. The results related to the mechatronics workshop from these measures will be reported at the time of presentation. [1] Lohani, V. K., Wildman, T., Connor, J., Mallikarjunan, K., Wolfe, M. L., Muffo, J., Knott, T.W., Lo, J., Loganathan, G.V., Goff, R., Gregg, M., Chang, M., Cundiff, J., Adel, G., Agblevor, F., Vaughan, D., Fox, E., Griffin, H., Mostaghimi, S., 2005, Spiral Curriculum Approach to Reformulate Engineering Curriculum, Proceedings of the 2005 Frontiers in Education Conference, Indianapolis, IN, 18-21 October 2005. [2] Lo, J, V.K. Lohani, and O.H. Griffin, “Full Implementation of a New Format for Freshmen Engineering Course”, to be published in the Proceedings of the 2006 American Society for Engineering Education Annual Conference and Exposition, Chicago, IL, June 18-21, 2006. San Juan, PR July 23 – 28, 2006 9th International Conference on Engineering Education R1G-27