Mechanical Behavior of a Spring
advertisement

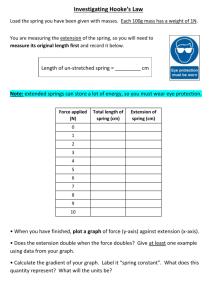
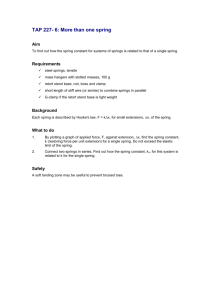
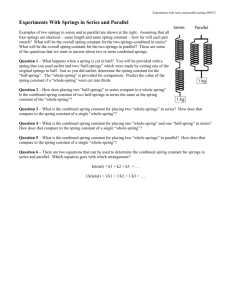
Mechanical Behavior of a Spring R. Hooke, DePotentia Restitutiva (1678) We have measured the strength “k” of a mechanical spring using both static and dynamic methods. In the static method, we explored Hooke’s Law, F(x) = -kx, by recording stretch length for various masses hung on a spring and obtained ks = 1.45 ± 0.05 N/m. In the dynamic method, we measured oscillation period for the same set-up and obtained kd =1.51 ± 0.03 N/m. These two methods agree within their uncertainty, but the dynamic method is more precise. The static method revealed a built-in tension, such that the “rest length” L0 ~ 10cm was less than the physical length Lm=12cm for no mass. The dynamic method revealed that the mass of the spring itself contributes an effective mass of m0= 110 ± 20 g. Introduction In this lab the mechanical behavior of a spring is investigated. Springs are characterized by a linear restoring force and exhibit simple harmonic motion. This behavior occurs in many other physical systems, such as 3D solids, waves, electrical circuits, etc. The concept is central to many subjects, and is discussed at length in physics, electrical engineering and mechanical engineering textbooks. Here we will measure the force constant using both static and dynamic methods and compare with Hooke’s law. Theory An ideal spring follows a linear force-distance relation and is massless. The static behavior then is described by Hooke’s Law: F(X) = -ks (X-X0), Eq. 1 where F is the force exerted by the spring (opposing the external stretch force), (X-X0) is the stretch distance, measured from the resting position X0 where the force is zero, and ks is the static spring constant. In this lab, the force is generated by calibrated weights hung on a vertically suspended spring. Any system described by Hooke’s law will exhibit “simple harmonic motion" if it is displaced from X0 and released. The system will oscillate at a frequency given by 2 = kd/m, Eq. 2 where is the angular frequency and kd is a dynamic spring constant. For perfect systems, we expect kd = ks. Real springs have a non-zero mass, but still exhibit a single oscillation frequency, given by 2 = kd/(m+m0) where "m" is the applied mass and m0 is an effective mass. It can be shown by Lagrangian method, that m0 is 1/3 of the physical spring mass (Analytic Mechanics, Fowles and Cassiday). Sample Lab: Springs p1/6 9/20/2010 Eq. 3 Procedure For the static measurements, calibrated weights were hung from the spring and the overall length between the centers of the two end-hooks was measured using a meter stick, by sighting carefully to minimize parallax. Data are taken first by adding and then by removing weights to establish uncertainties. For the dynamic measurements, the elapsed time for 3 complete cycles of oscillation was recorded for each mass. Both the start and stop times were marked at the top of the oscillation, after “synchronizing” to the pace of the motion. The amplitude was kept below 3 cm, to avoid non-linearity. A small decay of amplitude after 3 beats was noticed, but is not expected to affect the average period. Results Fig. 1 Spring length vs applied mass. The circles are for adding weights, the squares for subtracting weights. Figure 1 shows the data for the static measurement, which are tabulated in the appendix as Table A1. The “adding” and “subtracting” data agree within ± 0.5 cm, which establishes the random uncertainties. The data show a linear trend, with no systematic deviation, except for applied mass below m = 0.4kg where the length is constant because the coils are touching. This region is excluded from the analysis (see below). The remaining data are fit to equation 1, using plot variables L = (x-x0) and F = mg. Thus, the fit line is L (m) = -g/k * Sample Lab: Springs p2/6 9/20/2010 m, with slope S = 6.75 ± 0.24 cm/kg, and intercept I = 9.8 ± 0.24 cm. This yields a static spring constant ks = 1.45 ± 0.05 N/m. Calculations are shown in the appendix. Figure 2. Linearized plot of oscillation period vs mass. Figure 2 shows the dynamic behavior, which is tabulated in the appendix, Table A2. These data are fit with a linearized plot to equation 3, using plot variable T2, where T2= (2pi/)2 = (2pi)2/k * (m+m0). The fit region is limited to m > 0.4kg, as for the static data. The fit line yields slope S = 26.1 ± 0.5 sec2/kg and intercept I = 2.84 ± 0.5 sec2, corresponding to a dynamic spring constant kd = 1.51 ± 0.03 N/m and effective mass m0 = 110 ± 20 g. Calculations are shown in the appendix. Discussion For the static measurement, the fit to Equation 1 is good. That is, there is no systematic deviation from the trend. All physical systems that follow this behavior shall henceforth be said to follow Hooke’s Law. We note that, for applied mass less than 0.4kg, the spring has a fixed length of 12 cm. This can be understood as a pre-loaded tension, corresponding to a “rest length” of L0 = 10.2 ± 0.14 cm which is shorter than the physical length of Lm = 12 cm. The scatter in the data (random uncertainty) is about ± 0.5cm. This is attributed to parallax errors in reading the length. This could be improved using a travelling microscope, or more simply with a mirror assembly next to the ruler to allow auto-collimation of the sighting. It was expected that the stretch length might drop below the trendline for large applied force, due to material limitations (real springs get stronger), but this was not observed. This behavior might become visible with reduced scatter. For the dynamic measurement, the fit to Equation 3 is good, meaning there is no systematic deviation from the trend, within the scatter of approximately 0.7 sec. Concerning this scatter: Some uncertainty is expected due to errors of start and stop times, Sample Lab: Springs p3/6 9/20/2010 but these are minimized by “synching” to the motion before timing, and are estimated to be ~ 0.3 sec. This could be improved, in any case, using a photo-gate. We suspect that the scatter mainly arises from variation in the amplitude of the motion, either due to variable starting displacement or due to a variable waiting time before the start of timing. This could be improved by more diligent procedure. The results for the static vs dynamic method are shown in Table 1. We find that these two methods agree within their uncertainties. The dynamic method is more precise. Method Static Dynamic Value for k (N/m) 1.45 ± 0.05 1.51 ± 0.03 Table 1. Comparison of static vs dynamic results for spring constant. Sample Lab: Springs p4/6 9/20/2010 Appendix Mass (kg) 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.40 1.50 Length (cm) increasing 12.0 12.0 12.0 12.8 13.3 13.9 14.8 15.1 16.1 16.4 17.4 17.9 18.7 19.0 19.6 Length (cm) decreasing 12.0 12.0 12.0 12.5 13.3 14.0 14.4 15.2 15.9 16.4 17.1 18.0 18.5 19.1 19.9 Table A1. Length of spring for various applied masses. Mass (kg) 0.10 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 1.10 1.20 1.30 1.40 1.50 3*T (sec) 0.0 0.0 0.0 11.2 12.2 12.7 13.6 14.6 15.3 16.0 16.8 17.7 18.1 18.9 19.5 T2 (sec2) 0.0 0.0 0.0 14.0 16.5 18.1 20.4 23.8 25.9 28.3 31.4 34.7 36.3 39.7 42.5 Table A2. Oscillation period vs applied mass. Sample Lab: Springs p5/6 9/20/2010 Sample Lab: Springs p6/6 9/20/2010