Chapter 2
advertisement

2
Chapter
Signal and Linear System Analysis
Contents
2.1
Signal Models . . . . . . . . . . . . . . . . . . . . . .
2-3
2.1.1
Deterministic and Random Signals . . . . . . . .
2-3
2.1.2
Periodic and Aperiodic Signals . . . . . . . . . .
2-3
2.1.3
Phasor Signals and Spectra . . . . . . . . . . . .
2-4
2.1.4
Singularity Functions . . . . . . . . . . . . . . .
2-7
2.2
Signal Classifications . . . . . . . . . . . . . . . . . . 2-11
2.3
Generalized Fourier Series . . . . . . . . . . . . . . . 2-14
2.4
Fourier Series . . . . . . . . . . . . . . . . . . . . . . 2-20
2.5
2.4.1
Complex Exponential Fourier Series . . . . . . . 2-20
2.4.2
Symmetry Properties of the Fourier Coefficients
2.4.3
Trigonometric Form . . . . . . . . . . . . . . . 2-25
2.4.4
Parseval’s Theorem . . . . . . . . . . . . . . . . 2-26
2.4.5
Line Spectra . . . . . . . . . . . . . . . . . . . 2-26
2.4.6
Numerical Calculation of Xn . . . . . . . . . . . 2-30
2.4.7
Other Fourier Series Properties . . . . . . . . . . 2-37
2-23
Fourier Transform . . . . . . . . . . . . . . . . . . . . 2-38
2.5.1
Amplitude and Phase Spectra . . . . . . . . . . 2-39
2-1
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.6
2.7
2.5.2
Symmetry Properties . . . . . . . . . . . . . . . 2-39
2.5.3
Energy Spectral Density . . . . . . . . . . . . . 2-40
2.5.4
Transform Theorems . . . . . . . . . . . . . . . 2-42
2.5.5
Fourier Transforms in the Limit . . . . . . . . . 2-51
2.5.6
Fourier Transforms of Periodic Signals . . . . . 2-53
2.5.7
Poisson Sum Formula . . . . . . . . . . . . . . 2-59
Power Spectral Density and Correlation . . . . . . . . 2-60
2.6.1
The Time Average Autocorrelation Function . . 2-61
2.6.2
Power Signal Case . . . . . . . . . . . . . . . . 2-62
2.6.3
Properties of R./ . . . . . . . . . . . . . . . . 2-63
Linear Time Invariant (LTI) Systems . . . . . . . . . 2-75
2.7.1
Stability . . . . . . . . . . . . . . . . . . . . . . 2-77
2.7.2
Transfer Function . . . . . . . . . . . . . . . . . 2-77
2.7.3
Causality . . . . . . . . . . . . . . . . . . . . . 2-78
2.7.4
Properties of H.f / . . . . . . . . . . . . . . . . 2-79
2.7.5
Input/Output with Spectral Densities . . . . . . . 2-83
2.7.6
Response to Periodic Inputs . . . . . . . . . . . 2-83
2.7.7
Distortionless Transmission . . . . . . . . . . . 2-84
2.7.8
Group and Phase Delay . . . . . . . . . . . . . . 2-85
2.7.9
Nonlinear Distortion . . . . . . . . . . . . . . . 2-88
2.7.10 Ideal Filters . . . . . . . . . . . . . . . . . . . . 2-90
2.7.11 Realizable Filters . . . . . . . . . . . . . . . . . 2-92
2.7.12 Pulse Resolution, Risetime, and Bandwidth . . . 2-102
2.8
Sampling Theory . . . . . . . . . . . . . . . . . . . . . 2-107
2.9
The Hilbert Transform . . . . . . . . . . . . . . . . . 2-107
2.10 The Discrete Fourier Transform and FFT . . . . . . . 2-107
2-2
ECE 5625 Communication Systems I
2.1. SIGNAL MODELS
2.1
Signal Models
2.1.1
Deterministic and Random Signals
Deterministic Signals, used for this course, can be modeled as
completely specified functions of time, e.g.,
x.t / D A.t / cosŒ2f0.t /t C .t /
– Note that here we have also made the amplitude, frequency, and phase functions of time
– To be deterministic each of these functions must be completely specified functions of time
Random Signals, used extensively in Comm Systems II, take
on random values with known probability characteristics, e.g.,
x.t / D x.t; i /
where i corresponds to an elementary outcome from a sample
space in probability theory
– The i create a ensemble of sample functions x.t; i /, depending upon the outcome drawn from the sample space
2.1.2
Periodic and Aperiodic Signals
A deterministic signal is periodic if we can write
x.t C nT0/ D x.t /
for any integer n, with T0 being the signal fundamental period
ECE 5625 Communication Systems I
2-3
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
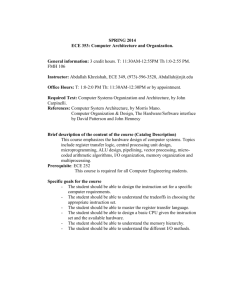
A signal is aperiodic otherwise, e.g.,
(
1; jt j 1=2
….t / D
0; otherwise
(a) periodic signal, (b) aperiodic signal, (c) random signal
2.1.3
Phasor Signals and Spectra
A complex sinusoid can be viewed as a rotating phasor
x.t
Q / D Ae j.!0tC/;
1<t <1
This signal has three parameters, amplitude A, frequency !0,
and phase The fixed phasor portion is Ae j while the rotating portion is
e j!0t
2-4
ECE 5625 Communication Systems I
2.1. SIGNAL MODELS
This signal is periodic with period T0 D 2=!0
It also related to the real sinusoid signal A cos.!0t C / via
Euler’s theorem
˚
x.t / D Re x.t
Q /
˚
D Re A cos.!0t C / C jA sin.!0t C /
D A cos.!0t C /
(a) obtain x.t/ from x.t/,
Q
(b) obtain x.t/ from x.t/
Q
and xQ .t/
We can also turn this around using the inverse Euler formula
x.t / D A cos.!0t C /
1
1
D x.t
Q / C xQ .t /
2
2
j.!0 t C/
Ae
C Ae
D
2
j.!0 tC/
The frequency spectra of a real sinusoid is the line spectra plotted in terms of the amplitude and phase versus frequency
ECE 5625 Communication Systems I
2-5
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
The relevant parameters are A and for a particular f0 D
!0=.2/
(a) Single-sided line spectra, (b) Double-sided line spectra
Both the single-sided and double-sided line spectra, shown
above, correspond to the real signal x.t / D A cos.2f0t C /
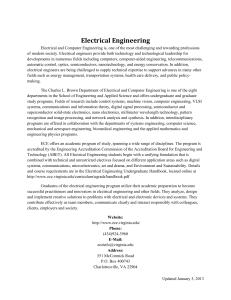
Example 2.1: Multiple Sinusoids
Suppose that
x.t / D 4 cos.2.10/t C =3/ C 24 sin.2.100/t
=8/
Find the two-sided amplitude and phase line spectra of x.t /
First recall that cos.!0t
=2/ D sin.!0t /, so
x.t / D 4 cos.2.10/t C =3/ C 24 cos.2.100/t
5=8/
The complex sinusoid form is directly related to the two-sided
line spectra since each real sinusoid is composed of positive
and negative frequency complex sinusoids
h
i
j.2.10/tC=3/
j.2.10/tC=3/
x.t / D 2 e
Ce
h
i
j.2.100/t 5=8/
j.2.100/t 5=8/
C 12 e
Ce
2-6
ECE 5625 Communication Systems I
2.1. SIGNAL MODELS
Amplitude
12
2
f (Hz)
-100
-10
100
10
5π/8
Phase
π/3
f (Hz)
-π/3
-5π/8
Two-sided amplitude and phase line spectra
2.1.4
Singularity Functions
Unit Impulse (Delta) Function
Singularity functions, such as the delta function and unit step
The unit impulse function, ı.t / has the operational properties
Z t2
ı.t t0/ dt D 1; t1 < t0 < t2
t1
ı.t
t0/ D 0; t ¤ t0
which implies that for x.t / continuous at t D t0, the sifting
property holds
Z 1
x.t /ı.t t0/ dt D x.t0/
1
– Alternatively the unit impulse can be defined as
Z 1
x.t /ı.t / dt D x.0/
1
ECE 5625 Communication Systems I
2-7
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Properties:
1. ı.at / D ı.t /=jaj
2. ı. t / D ı.t /
3. Sifting property special cases
8
ˆ
t1 < t0 < t2
ˆ
Z t2
<x.t0/;
x.t /ı.t t0/ dt D 0;
otherwise
ˆ
t1
ˆ
:undefined; t0 D t1 or t0 D t2
4. Sampling property
x.t /ı.t
t0/ D x.t0/ı.t
t0/
for x.t / continuous at t D t0
5. Derivative property
Z t2
x.t /ı .n/.t
t1
t0/ dt D . 1/nx .n/.t0/
ˇ
n
ˇ
d
x.t
/
ˇ
D . 1/n
n
dt ˇtDt0
Note: Dealing with the derivative of a delta function requires care
A test function for the unit impulse function helps our intuition
and also helps in problem solving
Two functions of interest are
(1
;
1
t
ı .t / D …
D 2
2
2
0;
1
t 2
ı1 .t / D sin
t
2-8
jt j otherwise
ECE 5625 Communication Systems I
2.1. SIGNAL MODELS
Test functions for the unit impulse ı.t/: (a) ı .t/, (b) ı1 .t/
In both of the above test functions letting ! 0 results in a
function having the properties of a true delta function
Unit Step Function
The unit step function can be defined in terms of the unit impulse
8
ˆ
t <0
ˆ
Z t
<0;
u.t / ı. / d D 1;
t >0
ˆ
1
ˆ
:undefined; t D 0
also
ı.t / D
ECE 5625 Communication Systems I
du.t /
dt
2-9
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.2: Unit Impulse 1st-Derivative
Consider
Z
1
x.t /ı 0.t / dt
1
Using the rectangular pulse test function, ı .t /, we note that
1
t also 1 ı .t / D …
D
u.t C / u.t /
2
2
2
and
1
d ı .t /
D
ı.t C /
dt
2
ı.t
/
Placing the above in the integrand with x.t / we obtain, with
the aid of the sifting property, that
Z 1
1
x.t /ı 0.t / dt D lim
x.t C / x.t /
!0 2
1
x.t / x.t C /
D lim
!0
2
D x 0.0/
2-10
ECE 5625 Communication Systems I
2.2. SIGNAL CLASSIFICATIONS
2.2
Signal Classifications
From circuits and systems we know that a real voltage or current waveform, e.t / or i.t / respectively, measured with respective a real resistance R, the instantaneous power is
P .t / D e.t /i.t / D i 2.t /R W
On a per-ohm basis, we obtain
p.t / D P .t /=R D i 2.t / W/ohm
The average energy and power can be obtain by integrating
over the interval jt j T with T ! 1
Z T
i 2.t / dt Joules/ohm
E D lim
T !1
T
Z T
1
P D lim
i 2.t / dt W/ohm
T !1 2T
T
In system engineering we take the above energy and power
definitions, and extend them to an arbitrary signal x.t /, possibly complex, and define the normalized energy (e.g. 1 ohm
system) as
E D lim
Z
T
2
Z
jx.t /j dt D
T !1
T
Z T
1
P D lim
jx.t /j2 dt
T !1 2T
T
ECE 5625 Communication Systems I
1
jx.t /j2 dt
1
2-11
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Signal Classes:
1. x.t / is an energy signal if and only if 0 < E < 1 so that
P D0
2. x.t / is a power signal if and only if 0 < P < 1 which
implies that E ! 1
Example 2.3: Real Exponential
Consider x.t / D Ae
˛t
u.t / where ˛ is real
For ˛ > 0 the energy is given by
ˇ
Z 1
2 2˛t ˇ1
A
e
2
ˇ
ED
Ae ˛t dt D
2˛ ˇ0
0
A2
D
2˛
For ˛ D 0 we just have x.t / D Au.t / and E ! 1
For ˛ < 0 we also have E ! 1
In summary, we conclude that x.t / is an energy signal for ˛ >
0
For ˛ > 0 the power is given by
1 A2
P D lim
1
T !1 2T 2˛
e
˛T
D0
For ˛ D 0 we have
1
A2
2
P D lim
A T D
T !1 2T
2
2-12
ECE 5625 Communication Systems I
2.2. SIGNAL CLASSIFICATIONS
For ˛ < 0 we have P ! 1
In summary, we conclude that x.t / is a power signal for ˛ D 0
Example 2.4: Real Sinusoid
Consider x.t / D A cos.!0t C /;
1<t <1
The signal energy is infinite since upon squaring, and integrating over one cycle, T0 D 2=!0, we obtain
Z N T0=2
A2 cos2.!0t C / dt
E D lim
N !1
D lim N
N !1
N T0 =2
Z T0=2
A2 cos2.!0t C / dt
T0 =2
2 Z T0 =2
A
1 C cos.2!0t C 2 / dt
N !1
2
T0 =2
A2
D lim N
T0 ! 1
N !1
2
D lim N
The signal average power is finite since the above integral is
normalized by 1=.N T0/, i.e.,
A2
1
A2
P D lim
N
T0 D
N !1 N T0
2
2
ECE 5625 Communication Systems I
2-13
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.3
Generalized Fourier Series
The goal of generalized Fourier series is to obtain a representation of
a signal in terms of points in a signal space or abstract vector space.
The coordinate vectors in this case are orthonomal functions. The
complex exponential Fourier series is a special case.
Let AE be a vector in a three dimensional vector space
Let aE1; aE2, and aE3 be linearly independent vectors in the same
three dimensional space, then
c1aE1 C c2aE2 C c3aE3 D 0 .zero vector/
only if the constants c1 D c2 D c3 D 0
The vectors aE1; aE2, and aE3 also span the three dimensional
space, that is for any vector AE there exists a set of constants
c1; c2, and c3 such that
AE D c1aE1 C c2aE2 C c3aE3
The set fE
a1; aE2; aE3g forms a basis for the three dimensional
space
Now let fE
a1; aE2; aE3g form an orthogonal basis, which implies
that
aEi aEj D .E
ai ; aEj / D hE
ai ; aEj i D 0; i ¤ j
which says the basis vectors are mutually orthogonal
From analytic geometry (and linear algebra), we know that we
can find a representation for AE as
E
E
E
.E
a2 A/
.E
a3 A/
.E
a1 A/
E
C
C
AD
jE
a1j2
jE
a 2 j2
jE
a 3 j2
2-14
ECE 5625 Communication Systems I
2.3. GENERALIZED FOURIER SERIES
which implies that
AE D
3
X
ci aEi
i D1
where
aEi AE
; i D 1; 2; 3
ci D
jE
ai j2
is the component of AE in the aEi direction
We now extend the above concepts to a set of orthogonal functions f1.t /; 2.t /; : : : ; N .t /g defined on to t t0 C T ,
where the dot product (inner product) associated with the n’s
is
Z t0CT
m.t /; n.t / D
m.t /n.t / dt
t0
(
cn; n D m
D cnımn D
0; n ¤ m
The n’s are thus orthogonal on the interval Œt0; t0 C T
Moving forward, let x.t / be an arbitrary function on Œt0; t0CT ,
and consider approximating x.t / with a linear combination of
n’s, i.e.,
x.t / ' xa .t / D
N
X
Xnn.t /; t0 t t0 C T;
nD1
where a denotes approximation
ECE 5625 Communication Systems I
2-15
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
A measure of the approximation error is the integral squared
error (ISE) defined as
Z
ˇ
ˇ2
ˇ
N D
x.t / xa .t /ˇ dt;
T
where
R
T
denotes integration over any T long interval
To find the Xn’s giving the minimum N we expand the above
integral into three parts (see homework problems)
Z
jx.t /j2 dt
N D
T
C
N
X
nD1
ˇ
ˇ
cn ˇˇXn
ˇ2
ˇZ
N
X
ˇ
1 ˇˇ
ˇ
.t
/
dt
x.t
/
n
ˇ
ˇ
c
n
T
nD1
ˇ2
Z
ˇ
1
x.t /n .t / dt ˇˇ
cn T
– Note that the first two terms are independent of the Xn’s
and the last term is nonnegative (missing steps are in text
homework problem 2.14)
We conclude that N is minimized for each n if each element
of the last term is made zero by setting
Z
1
Xn D
x.t /n.t / dt Fourier Coefficient
cn T
This also results in
N
2-16
min
Z
D
T
jx.t /j2 dt
N
X
cnjXnj2
nD1
ECE 5625 Communication Systems I
2.3. GENERALIZED FOURIER SERIES
Definition: The set of of n’s is complete if
lim .N /min D 0
N !1
for
R
T
jx.t /j2 dt < 1
– Even if though the ISE is zero when using a complete
set of orthonormal functions, there may be isolated points
where x.t / xa .t / ¤ 0
Summary
x.t / D l.i.m.
1
X
Xnn.t /
nD1
Xn D
1
cn
Z
T
x.t /n.t / dt
– The notation l.i.m. stands for limit in the mean, which is
a mathematical term referring to the fact that ISE is the
convergence criteria
Parseval’s theorem: A consequence of completeness is
Z
1
X
jx.t /j2 dt D
cnjXnj2
T
ECE 5625 Communication Systems I
nD1
2-17
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
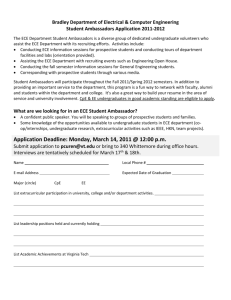
Example 2.5: A Three Term Expansion
Approximate the signal x.t / D cos 2 t on the interval Œ0; 1
using the following basis functions
1
φ1(t)
x(t)
1
0.75
0.75
0.5
0.5
0.25
0.25
0.2
0.4
0.6
0.8
1
t
-0.25
-0.25
-0.5
-0.5
-0.75
-0.75
-1
-1
φ2(t)
0.4
0.6
0.8
1
t
0.2
0.4
0.6
0.8
1
t
φ3(t)
1
1
0.75
0.75
0.5
0.5
0.25
0.25
0.2
0.2
0.4
0.6
0.8
1
t
-0.25
-0.25
-0.5
-0.5
-0.75
-0.75
-1
-1
Signal x.t/ and basis functions i .t/; i D 1; 2; 3
To begin with it should be clear that 1.t /; 2.t /, and 3.t /
are mutually orthogonal since the integrand associated with the
inner product, i .t / j.t / D 0, for i ¤ j; i; j D 1; 2; 3
2-18
ECE 5625 Communication Systems I
2.3. GENERALIZED FOURIER SERIES
Before finding the Xn’s we need to find the cn’s
Z
Z 1=4
c1 D
j1.t /j2 dt
j1j2 dt D 1=4
0
ZT
c2 D
j2.t /j2 dt D 1=2
ZT
c3 D
j3.t /j2 dt D 1=4
T
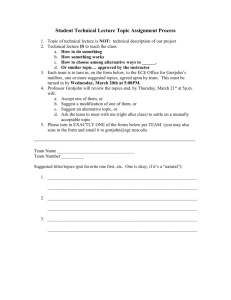
Now we can compute the Xn’s:
Z
X1 D 4 x.t /1.t / dt
ZT 1=4
ˇ1=4
2
2
ˇ
D4
cos.2 t / dt D sin.2 t /ˇ D
0
Z0 3=4
ˇ3=4
1
2
ˇ
X2 D 2
cos.2 t / dt D sin.2 t /ˇ D
1=4
1=4
Z 1
ˇ1
2
2
ˇ
X3 D 4
cos.2 t / dt D sin.2 t /ˇ D
3=4
3=4
1
x(t)
0.75
2/π
xa(t)
0.5
0.25
0.2
0.4
0.6
0.8
1
t
-0.25
-0.5
-2/π
-0.75
-1
Functional approximation
ECE 5625 Communication Systems I
2-19
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
The integral-squared error, N , can be computed as follows:
3
X
Z ˇ
ˇ
ˇx.t /
N D
ˇ
T
Z
nD1
2
D
jx.t /j dt
T
1
D
2
1
D
2
2.4
ˇ2
ˇ
Xnn.t /ˇˇ dt
3
X
cnjXnj2
nD1
ˇ ˇ
ˇ ˇ
1 ˇˇ 2 ˇˇ2 1 ˇˇ 2 ˇˇ2
4 ˇ ˇ
2 ˇ ˇ
ˇ ˇ2
ˇ2ˇ
ˇ ˇ D 0:0947
ˇ ˇ
ˇ ˇ
1 ˇˇ 2 ˇˇ2
4 ˇ ˇ
Fourier Series
When we choose a particular set of basis functions we arrive at the
more familiar Fourier series.
2.4.1
Complex Exponential Fourier Series
A set of n’s that is complete is
n.t / D e j n!0t ; n D 0; ˙1; ˙2; : : :
over the interval .t0; t0 C T0/ where !0 D 2=T0 is the period
of the expansion interval
2-20
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
proof of orthogonality
Z t0CT0
Z t0CT0
t
2 t
j m 2
j
n
j 2
.m n/t
T0
T0
m.t /; n.t / D
e
e
dt D
e T0
dt
t0
8t0R
t0 CT0
ˆ
dt;
mDn
ˆ
<Rt0
t0 CT0
D
cosŒ2.m n/t =T0
t
0
ˆ
ˆ
: Cj sinŒ2.m n/t =T0 dt; m ¤ n
(
T0 ; m D n
D
0; m ¤ n
We also conclude that cn D T0
Complex exponential Fourier series summary:
x.t / D
1
X
Xne j n!0t ; t0 t t0 C T0
nD 1
1
where Xn D
T0
Z
x.t /e
j n!0 t
T0
The Fourier series expansion is unique
Example 2.6: x.t / D cos2 !0t
If we expand x.t / into complex exponentials we can immediately determine the Fourier coefficients
1 1
x.t / D C cos 2!0t
2 2
1 1
1
D C e j 2!0t C e j 2!0t
2 4
4
ECE 5625 Communication Systems I
2-21
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
The above implies that
8
1
ˆ
ˆ
<2;
Xn D 14 ;
ˆ
ˆ
:0;
nD0
n D ˙2
otherwise
Time Average Operator
The time average of signal v.t / is defined as
Z T
1
hv.t /i D lim
v.t / dt
T !1 2T
T
Note that
hav1.t / C bv2.t /i D ahv1.t /i C bhv2.t /i;
where a and b are arbitrary constants
If v.t / is periodic, with period T0, then
Z
1
hv.t /i D
v.t / dt
T0 T 0
The Fourier coefficients can be viewed in terms of the time
average operator
Let v.t / D x.t /e
that
j n!0 t
using e
j
D cos j sin , we find
Xn D hv.t /i D hx.t /e j n!0t i
D hx.t / cos n!0ti j hx.t / sin n!0t i
2-22
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
2.4.2
Symmetry Properties of the Fourier Coefficients
For x.t / real, the following coefficient symmetry properties
hold:
1. Xn D X
n
2. jXnj D jX nj
3. †Xn D
†X
n
proof
Z
1
x.t /e j n!0t dt
Xn D
T0 T0
Z
1
D
x.t /e j. n/!0t dt D X
T0 T0
n
since x .t / D x.t /
Waveform symmetry conditions produce special results too
1. If x. t / D x.t / (even function), then
˚ ˚ Xn D Re Xn ; i.e., Im Xn D 0
2. If x. t / D
x.t / (odd function), then
˚ ˚ Xn D Im Xn ; i.e., Re Xn D 0
3. If x.t ˙ T0=2/ D
x.t / (odd half-wave symmetry), then
Xn D 0 for n even
ECE 5625 Communication Systems I
2-23
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.7: Odd Half-wave Symmetry Proof
Consider
1
Xn D
T0
Z
t0 DT0 =2
t0
1
x.t /e j n!0t dtC
T0
t0 CT0
Z
j n!0 t 0
x.t 0/e
dt 0
t0 CT0 =2
In the second integral we change variables by letting t D t 0
T0=2
1
Xn D
T0
Z
x.t /e
j n!0 t
dt
t0
1
C
T0
D 1
t0 CT0 =2
tCT0 =2
Z
x.t T0=2/ e
„ ƒ‚ …
t0
e
j n!0 .t CT0 =2/
dt
x.t/
j n!0 T0 =2
t0 CT0 =2
1 Z
T0
x.t /e
j n!0 t
dt
t0
but n!0.T0=2/ D n.2=T0/.T0=2/ D n, thus
(
1
e
j n
D
2;
n odd
0;
n even
We thus see that the even indexed Fourier coefficients are indeed zero under odd half-wave symmetry
2-24
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
2.4.3
Trigonometric Form
The complex exponential Fourier series can be arranged as follows
1
X
x.t / D
Xne j n!0t
nD 1
D X0 C
1
X
Xne j n!0t C X ne
j n!0 t
nD1
For real x.t /, we may know that jX nj D jXnj and †Xn D
†X n, so
x.t / D X0 C
1
X
jXnje
nD1
1
X
D X0 C 2
j Œn!0 t C†Xn
C jXnje
jXnj cos n!0t C †Xn
j Œn!0 t C†Xn
nD1
since cos.x/ D .e jx C e
jx
/=2
From the trig identity cos.u C v/ D cos u cos v
follows that
x.t / D X0 C
1
X
nD1
An cos.n!0t / C
1
X
sin u sin v, it
Bn sin.n!0t /
nD1
where
An D 2hx.t / cos.n!0t /i
Bn D 2hx.t / sin.n!0t /i
ECE 5625 Communication Systems I
2-25
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.4.4
Parseval’s Theorem
Fourier series analysis are generally used for periodic signals,
i.e., x.t / D x.t C nT0/ for any integer n
With this in mind, Parseval’s theorem becomes
1
P D
T0
Z
jx.t /j2 dt D
T0
D X02 C 2
1
X
jXnj2
nD 1
1
X
jXnj2
.W/
nD1
Note: A 1 ohm system is assumed
2.4.5
Line Spectra
Line spectra was briefly reviewed earlier for simple signals
For any periodic signal having Fourier series representation we
can obtain both single-sided and double-sided line spectra
The double-sided magnitude and phase line spectra is most
easily obtained form the complex exponential Fourier series,
while the single-sided magnitude and phase line spectra can be
obtained from the trigonometric form
1
X
Double-sided
()
Xne j 2.nf0/t
mag. and phase
nD 1
1
X
Single-sided
() X0 C 2
jXnj cosŒ2.nf0/t C †Xn
mag. and phase
nD1
2-26
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
– For the double-sided simply plot as lines jXnj and †Xn
versus nf0 for n D 0; ˙1; ˙2; : : :
– For the single-sided plot jX0j and †X0 as a special case
for n D 0 at nf0 D 0 and then plot 2jXnj and †X0 versus
nf0 for n D 1; 2; : : :
Example 2.8: Cosine Squared
Consider
A A
x.t / D A cos .2f0t C / D C cos 2.2f0/t C 21
2
2
A
A A
D C e j 21 e j 2.2f0/t C e j 21 e j 2.2f0/t
2
4
4
2
DoubleSided
f
-2f0
-2f0
f
2f0
2f0
SingleSided
f
2f0
ECE 5625 Communication Systems I
f
2f0
2-27
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.9: Pulse Train
x(t)
A
...
...
t
-2T0
-T0
0
T0 T0 + τ
τ
Periodic pulse train
The pulse train signal is mathematically described by
1
X
t nT0 =2
x.t / D
A…
nD 1
The Fourier coefficients are
Z
A e j 2.nf0/t ˇˇ
1 j 2.nf0 /t
Ae
dt D
Xn D
ˇ
T0 0
T0
j 2.nf0/ 0
A 1 e j 2.nf0/
D
T0
j 2.nf0/
A e j.nf0/ e j.nf0/
D
e j.nf0/
T0
.2j /.nf0/
A sinŒ.nf0/
D
e j.nf0/
T0
Œ.nf0/
To simplify further we define
sinc.x/ D
2-28
sin.x/
x
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
Finally,
Xn D
A
sinc.nf0 /e
T0
j.nf0 /
; n D 0; ˙1; ˙2; : : :
To plot the line spectra we need to find jXnj and †Xn
A
jsincŒ.nfo/ j
T
80
ˆ
sinc.nfo / > 0
ˆ
< .nf0/;
†Xn D
.nf0/ C ; nf0 > 0 and sinc.nf0 / < 0
ˆ
ˆ
: .nf0/ ; nf0 < 0 and sinc.nf0 / < 0
jXnj D
Pulse train double-sided line spectra for D 0:125 using Python,
specifically use ssd.line_spectra()
As a specific example enter the following at the IPython command prompt
n = arange(0,25+1) # Get 0 through 25 harmonics
tau = 0.125; f0 = 1; A = 1;
Xn = A*tau*f0*sinc(n*f0*tau)*exp(-1j*pi*n*f0*tau)
figure(figsize=(6,2))
f = n # Assume a fundamental frequency of 1 Hz so f = n
ssd.line_spectra(f,Xn,mode='mag',fsize=(6,2))
xlim([-25,25]);
figure(figsize=(6,2))
ssd.line_spectra(f,Xn,mode='phase',fsize=(6,2))
xlim([-25,25]);
ECE 5625 Communication Systems I
2-29
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
f0 = 1, t = 0.125
At f0 = 0.125
1 t =8
Phase slope = -p f t
= -0.125´ p f
2.4.6
Numerical Calculation of Xn
Here we consider a purely numerical calculation of the Xk coefficients from a single period waveform description of x.t /
In particular, we will use MATLAB’s fast Fourier transform
(FFT) function to carry out the numerical integration
By definition
1
Xk D
T0
2-30
Z
x.t /e
j 2kf0 t
dt; k D 0; ˙1; ˙2; : : :
T0
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
A simple rectangular integration approximation to the above
integral is
N 1
1 X
Xk '
x.nT /e
T0 nD0
j k2.nf0 /T0 =N
T0
; k D 0; ˙1; ˙2; : : :
N
where N is the number of points used to partition the time
interval Œ0; T0 and T D T0=N is the time step
Using the fact that 2f0T0 D 2, we can write that
N 1
1 X
x.nT /e
Xk '
N nD0
j 2k n
N
; k D 0; ˙1; ˙2; : : :
Note that the above must be evaluated for each Fourier coefficient of interest
Also note that the accuracy of the Xk values depends on the
value of N
– For k small and x.t / smooth in the sense that the harmonics rolloff quickly, N on the order of 100 may be adequate
– For k moderate, say 5–50, N will have to become increasingly larger to maintain precision in the numerical
integral
Calculation Using the FFT
The FFT is a powerful digital signal processing (DSP) function, which is a computationally efficient version of the discrete Fourier transfrom (DFT)
ECE 5625 Communication Systems I
2-31
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
For the purposes of the problem at hand, suffice it to say that
the FFT is just an efficient algorithm for computing
X Œk D
N
X1
xŒne
j 2k n=N
; k D 0; 1; 2; : : : ; N
1
nD0
If we let xŒn D x.nT /, then it should be clear that
Xk '
N
1
X Œk; k D 0; 1; : : : ;
N
2
To obtain Xk for k < 0 note that
X
k
N 1
1
1 X
x.nT /e
' X Πk D
N
N nD0
N 1
1 X
x.nT /e
D
N nD0
since e
j 2N n=N
De
j 2 n
j 2.N k/n
N
j 2. k/n
N
D X ŒN
k
D1
In summary
(
Xk '
X Œk=N;
X ŒN
k=N;
0 k N=2
N=2 k < 0
To use the Python function fft.fft() to obtain the Xk we
simply let
X D fft.fft(x)
where x D fx.t / W t D 0; T0=N; 2T0=N; : : : ; T0.N
1/=N g
Unlike in MATLAB X Œ0 is really found in X[0]
2-32
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
Example 2.10: Finite Rise/Fall-Time PulseTrain
x(t)
1
Pulse width = τ
Rise and fall time = tr
τ
1/2
0
tr
τ
τ + tr
t
T0
Pulse train with finite rise and fall time edges
Shown above is one period of a finite rise and fall time pulse
train
We will numerically compute the Fourier series coefficients of
this signal using the FFT
The Python function trap_pulse was written to generate one
period of the signal using N samples
def trap_pulse(N,tau,tr):
"""
xp = trap_pulse(N,tau,tr)
Mark Wickert, January 2015
"""
n = arange(0,N)
t = n/N
xp = zeros(len(t))
# Assume tr and tf are equal
T1 = tau + tr
# Create one period of the trapezoidal pulse waveform
for k in n:
if t[k] <= tr:
xp[k] = t[k]/tr
elif (t[k] > tr and t[k] <= tau):
ECE 5625 Communication Systems I
2-33
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
xp[k] = 1
elif (t[k] > tau and t[k] < T1):
xp[k] = -t[k]/tr + 1 + tau/tr;
else:
xp[k] = 0
return xp, t
We now plot the double-sided line spectra for D 1=8 and two
values of rise-time tr
2-34
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
1/20
1/8
Sidelobes smaller
than ideal pulse train
which has zero rise
time
1/τ = 8
Signal x.t/ and line spectrum for D 1=8 and tr D 1=20
The spectral roll-off rate is faster with the trapezoid
Clock edges are needed in digital electronics, but by slowing
the edge speed down the clock harmonic generation can be
reduced
The second plot is a more extreme example
ECE 5625 Communication Systems I
2-35
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
1/10
1/8
Sidelobes smaller
than with tr = 1/20
case
~10dB
1/τ = 8
more
Signal x.t/ and line spectrum for D 1=8 and tr D 1=10
2-36
ECE 5625 Communication Systems I
2.4. FOURIER SERIES
2.4.7
Other Fourier Series Properties
Given x.t / has Fourier series (FS) coefficients Xn, if
y.t / D A C Bx.t /
it follows that
(
Yn D
A C BX0;
nD0
BXn;
n¤0
proof:
Yn D hy.t /e
j 2.nf0 /t
i
D Ahe j 2.nf0/t i C Bhx.t /e
1; n D 0
C BXn
DA
0; n ¤ 0
j 2.nf0 /t
i
QED
Likewise if
y.t / D x.t
t0 /
it follows that
Yn D X n e
j 2.nf0 /t0
proof:
Yn D hx.t
Let D t
t0/e
j 2.nf0 /t
i
t0 which implies also that t D C t0, so
Yn D hx./e
D hx./e
D Xn e
j 2.nf0 /.Ct0 /
j 2.nf0 /
ie
i
j 2.nf0 /t0
j 2.nf0 /t0
QED
ECE 5625 Communication Systems I
2-37
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.5
Fourier Transform
The Fourier series provides a frequency domain representation
of a periodic signal via the Fourier coefficients and line spectrum
The next step is to consider the frequency domain representation of aperiodic signals using the Fourier transform
Ultimately we will be able to include periodic signals within
the framework of the Fourier transform, using the concept of
transform in the limit
The text establishes the Fourier transform by considering a
limiting case of the expression for the Fourier series coefficient
Xn as T0 ! 1
The Fourier transform (FT) and inverse Fourier transfrom (IFT)
is defined as
Z 1
X.f / D
x.t /e j 2f t dt (FT)
1
Z 1
X.f /e j 2f t df (IFT)
x.t / D
1
Sufficient conditions for the existence of the Fourier transform
are
R1
1. 1 jx.t /j dt < 1
2. Discontinuities in x.t / be finite
R1
3. An alternate sufficient condition is that 1 jx.t /j2 dt <
1, which implies that x.t / is an energy signal
2-38
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
2.5.1
Amplitude and Phase Spectra
FT properties are very similar to those obtained for the Fourier
coefficients of periodic signals
The FT, X.f / D Ffx.t /g, is a complex function of f
X.f / D jX.f /je j.f / D jX.f /je j †X.f /
D RefX.f /g C j ImfX.f /g
The magnitude jX.f /j is referred to as the amplitude spectrum
The the angle †X.f / is referred to as the phase spectrum
Note that
Z
1
RefX.f /g D
x.t / cos 2f t dt
Z
1
1
ImfX.f /g D
x.t / sin 2f t dt
1
2.5.2
Symmetry Properties
If x.t / is real it follows that
Z 1
X. f / D
x.t /e j 2. f /t dt
Z11
D
x.t /e j 2f t dt D X .f /
1
thus
jX. f /j D jX.f /j (even in frequency)
†X. f / D †X.f / (odd in frequency)
ECE 5625 Communication Systems I
2-39
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Additionally,
1. For x. t / D x.t / (even function), ImfX.f /g D 0
2. For x. t / D
2.5.3
x.t / (odd function), RefX.f /g D 0
Energy Spectral Density
From the definition of signal energy,
Z 1
jx.t /j2 dt
ED
1
Z 1
Z 1
X.f /e j 2f t df dt
x .t /
D
1
Z 1
Z 1
1
x .t /e j 2f t dt df
D
X.f /
1
1
but
Z
1
x .t /e j 2f t dt D
Z
1
x.t /e
j 2f t
dt
D X .f /
1
1
Finally,
Z
1
ED
2
Z
1
jx.t /j dt D
1
jX.f /j2 df
1
which is known as Rayleigh’s Energy Theorem
Are the units consistent?
– Suppose x.t / has units of volts
– jX.f /j2 has units of (volts-sec)2
2-40
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
– In a 1 ohm system jX.f /j2 has units of Watts-sec/Hz =
Joules/Hz
The energy spectral density is defined as
G.f / D jX.f /j2 Joules/Hz
It then follows that
Z
1
ED
G.f / df
1
Example 2.11: Rectangular Pulse
Consider
x.t / D A…
t
t0
FT is
Z
t0 C=2
X.f / D A
e
j 2f t
dt
t0 =2
ˇt0C=2
ˇ
e
ˇ
DA
ˇ
j 2f ˇ
t =2
jf 0 jf e
e
D A e
.j 2/f D A sinc.f /e j 2f t0
j 2f t
A…
t
t0
ECE 5625 Communication Systems I
F
! Asinc.f /e
j 2f t0
j 2f t0
2-41
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Plot jX.f /j, †X.f /, and G.f /
Aτ1
X(f) 3 π
Amplitude
Spectrum
|X(f)| 0.8
Phase
Spectrum
0.6
?3
0.4
-2/τ? 2
?2
-2/τ
?1
-1/τ
f
0
1/τ1
2
2/τ
1
?3
3
π/2
? 1-1/τ
?1
−π/2
?2
t0 = τ/2
0.2
?3
2
11/τ
−π
2/τ
2
3
f
slope = -πfτ/2
(Aτ)12
G(f) = |X(f)|2
Energy
Spectral
Density
0.8
0.6
0.4
0.2
?3
?2
-2/τ
?1
-1/τ
0
1/τ1
2
2/τ
3
f
Rectangular pulse spectra
2.5.4
Transform Theorems
Be familiar with the FT theorems found in the table of Appendix G.6 of the text
Superposition Theorem
a1x1.t / C a2x2.t /
F
! a1X1.f / C a2X2.f /
proof:
2-42
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Time Delay Theorem
x.t
t0 /
F
! X.f /e
j 2f t0
proof:
Frequency Translation Theorem
In communications systems the frequency translation and modulation theorems are particularly important
x.t /e j 2f0t
proof: Note that
Z 1
x.t /e j 2f0t e
j 2f t
F
! X.f
Z
1
dt D
1
f0/
x.t /e
j 2.f f0 /t
dt
1
so
˚
F x.t /e j 2f0t D X.f
f0 /
QED
Modulation Theorem
The modulation theorem is an extension of the frequency translation theorm
x.t / cos.2f0t /
ECE 5625 Communication Systems I
1
! X.f
2
F
1
f0/ C X.f C f0/
2
2-43
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
proof: Begin by expanding
1
1
cos.2f0t / D e j 2f0t C e
2
2
j 2f0 t
Then apply the frequency translation theorem to each term separately
X(f)
signal
multiplier
A
x(t)
Y(f)
y(t)
A/2
f
0
0
-f0
cos(2πf0t)
f
f0
A simple modulator
Duality Theorem
Note that
Z
1
FfX.t /g D
X.t /e
j 2f t
Z
1
dt D
1
X.t /e j 2.
f /t
dt
1
which implies that
X.t /
2-44
F
! x. f /
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Example 2.12: Rectangular Spectrum
X(f)
1
-W
0
W
f
Using duality on the above we have
t
F
X.t / D …
! 2W sinc.2Wf / D x. f /
2W
Since sinc( ) is an even function (sinc.x/ D sinc. x/), it follows that
f
F
2W sinc.2W t / ! …
2W
Differentiation Theorem
The general result is
d nx.t / F
! .j 2f /n X.f /
n
dt
proof: For n D 1 we start with the integration by parts formula,
ˇ R
R
ˇ
u dv D uv ˇ
v du, and apply it to
Z 1
dx
dx j 2f t
F
D
e
dt
dt
1 dt
Z 1
ˇ1
ˇ
D x.t /e j 2f t ˇ Cj 2f
x.t /e j 2f t dt
1
„
ƒ‚
…
„ 1
ƒ‚
…
0
ECE 5625 Communication Systems I
X.f /
2-45
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
alternate — From Leibnitz’s rule for differentiation of integrals,
Z 1
Z 1
@F .f; t /
d
F .f; t / df D
df
dt 1
@f
1
so
Z 1
dx.t /
d
D
X.f /e j 2f t df
dt
dt
Z 1 1
@e j 2f t
df
D
X.f /
@t
Z 1
1
D
j 2f X.f /e j 2f t df
1
)
F
! j 2f X.f /
dx=dt
QED
Example 2.13: FT of Triangle Pulse
1
−τ
t
τ
0
Note that
1/τ
1/τ
τ
t
−τ
-1/τ
2-46
−τ
τ
t
-2/τ
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Using the differentiation theorem for n D 2 we have that
n1
o
t
1
2
1
F ƒ
D
F ı.t C /
ı.t / C ı.t /
.j 2f /2 2
1 j 2f e
C 1 e j 2f D
.j 2f /2
2 cos.2f / 2
D
.2f /2
4 sin2.f /
2
D
D
sinc
.f /
4.f /2
t
F
! sinc2.f /
ƒ
Convolution and Convolution Theorem
Before discussing the convolution theorem we need to review
convolution
The convolution of two signals x1.t / and x2.t / is defined as
Z 1
x.t / D x1.t / x2.t / D
x1./x2.t / d 1
Z 1
D x2.t / x1.t / D
x2./x1.t / d 1
A special convolution case is ı.t t0/
Z 1
ı.t t0/ x.t / D
ı. t0/x.t / d 1
ˇ
D x.t /ˇDt D x.t t0/
0
ECE 5625 Communication Systems I
2-47
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.14: Rectangular Pulse Convolution
Let x1.t / D x2.t / D ….t = /
To evaluate the convolution integral we need to consider the
integrand by sketching of x1./ and x2.t / on the axis for
different values of t
For this example four cases are needed for t to cover the entire
time axis t 2 . 1; 1/
Case 1: When t < we have no overlap so the integrand is
zero and x.t / is zero
x2(t - λ)
x1(λ)
No overlap for t +
τ/2 < -τ/2 or t < τ
t - τ/2
t
t + τ/2
−τ/2
0
λ
τ/2
Case 2: When < t < 0 we have overlap and
Z 1
x1./x2.t / d x.t / D
1
Z t C=2
ˇt C=2
ˇ
D
d D ˇ
=2
=2
D t C =2 C =2 D C t
x2(t - λ)
x1(λ)
Overlap begins when t
+ τ/2 = -τ/2 or t = -τ
0
−τ/2
t + τ/2
2-48
τ/2
λ
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Case 3: For 0 < t < the leading edge of x2.t / is to the
right of x1./, but the trailing edge of the pulse is still overlapped
Z =2
x.t / D
d D =2 t C =2 D t
t =2
x2(t - λ)
x1(λ)
Overlap lasts until t = τ
−τ/2
0
τ/2
t - τ/2
λ
t + τ/2
Case 4: For t > we have no overlap, and like case 1, the
result is
x.t / D 0
x2(t - λ)
x1(λ)
No overlap for t > τ
−τ/2
0
τ/2
t - τ/2
t + τ/2
λ
Collecting the results
8
ˆ
0;
t< ˆ
ˆ
ˆ
< C t;
t <0
x.t / D
ˆ
t; 0 t < ˆ
ˆ
ˆ
:0;
t (
jt j; jtj D
0;
otherwise
ECE 5625 Communication Systems I
2-49
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Final summary,
t
t
t
…
…
D ƒ
Convolution Theorem: We now consider x1.t /x2.t / in terms
of the FT
Z 1
x1. /x2.t / d 1Z
Z 1
1
D
x1. /
X2.f /e j 2f .t / df d 1
Z 11
Z 1
x1. /e j 2f d e j 2f t df
X2.f /
D
1
1
Z 1
D
X1.f /X2.f /e j 2f t df
1
which implies that
x1.t / x2.t /
F
! X1.f /X2.f /
Example 2.15: Revisit ….t = / ….t = /
Knowing that ….t = /….t = / D ƒ.t = / in the time domain,
we can follow-up in the frequency domain by writing
˚
˚
2
F ….t = / F ….t = / D sinc.f /
We have also established the transform pair
t
F
2
2
2
! sinc .f / D sinc .f /
ƒ
2-50
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
or
t
ƒ
F
! sinc2.f /
Multiplication Theorem
Having already established the convolution theorem, it follows
from the duality theorem or direct evaluation, that
x1.t / x2.t /
2.5.5
F
! X1.f / X2.f /
Fourier Transforms in the Limit
Thus far we have considered two classes of signals
1. Periodic power signals which are described by line spectra
2. Non-periodic (aperiodic) energy signals which are described
by continuous spectra via the FT
We would like to have a unifying approach to spectral analysis
To do so we must allow impulses in the frequency domain by
using limiting operations on conventional FT pairs, known as
Fourier transforms-in-the-limit
– Note: The corresponding time functions have infinite energy, which implies that the concept of energy spectral
density will not apply for these signals (we will introduce
the concept of power spectral density for these signals)
ECE 5625 Communication Systems I
2-51
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.16: A Constant Signal
Let x.t / D A for 1 < t < 1
We can write
x.t / D lim A….t =T /
T !1
Note that
˚
F A….t =T / D AT sinc.f T /
Using the transform-in-the-limit approach we write
Ffx.t /g D lim AT sinc.f T /
T !1
1
?3
?2
?1
1
AT1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
? 0.2
1
f
3 ?3
2
?2
?1
AT2
T2 >> T1
1
? 0.2
2
f
3
Increasing T in AT sinc.f T /
Note that since x.t / has no time variation it seems reasonable
that the spectral content ought to be confined to f D 0
Also note that it can be shown that
Z 1
AT sinc.f T / df D A;
8T
1
Thus we have established that
A
2-52
F
! Aı.f /
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
As a further check
Z
˚
F 1 Aı.f / D
1
Aı.f /e
j 2ff t
df D Ae
ˇ
ˇ
j 2f t ˇ
f D0
1
DA
As a result of the above example, we can obtain several more
FT-in-the-limit pairs
F
Ae j 2f0t
! Aı.f f0/
A j
F
e ı.f f0/ C e
A cos.2f0t C / !
2
F
Aı.t t0/ ! Ae j 2f t0
j
ı.f C f0/
Reciprocal Spreading Property: Compare
F
! A and A
Aı.t /
F
! Aı.f /
A constant signal of infinite duration has zero spectral width,
while an impulse in time has zero duration and infinite spectral
width
2.5.6
Fourier Transforms of Periodic Signals
For an arbitrary periodic signal with Fourier series
x.t / D
1
X
Xne j 2 nf0t
nD 1
ECE 5625 Communication Systems I
2-53
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
we can write
1
X
"
X.f / D F
#
Xne j 2 nf0t
nD 1
D
D
1
X
nD 1
1
X
n
o
j 2 nf0 t
XnF e
Xnı.f
nf0/
nD 1
using superposition and FfAe j 2f0t g D Aı.f
f0 /
What is the difference between line spectra and continuous
spectra? none!
Mathematically,
Convert to
time domain
Line
Spectra
Sum phasors
Convert to
time domain
Continuous
Spectra
Integrate impulses to
get phasors via the
inverse FT
The Fourier series coefficients need to be known before the FT
spectra can be obtained
A technique that obtained the FT directly will be discussed
later
2-54
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Example 2.17: Ideal Sampling Waveform
When we discuss sampling theory it will be useful to have the
FT of the periodic impulse train signal
1
X
ys .t / D
ı.t
mTs /
mD 1
where Ts is the sample spacing or period
Since this signal is periodic, it must have a Fourier series representation too
In particular
1
Yn D
Ts
Z
ı.t /e
j 2.nfs /t
dt D
Ts
1
D fs ; any n
Ts
where fs is the sampling rate in Hz
The FT of ys .t / is given by
Ys .f / D fs
1
X
1
X
˚ j 2 nf /t 0
F e
D fs
ı.f
nD 1
nfs /
nD 1
Summary,
1
X
ı.t
mD 1
ECE 5625 Communication Systems I
mTs /
F
! fs
1
X
ı.f
nfs /
nD 1
2-55
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
ys(t)
1
...
...
-Ts
Ts
0
t
4Ts
Ys(f)
fs
...
...
f
-fs
fs
0
4fs
An impulse train in times is an impulse train in frequency
Example 2.18: Convolve Step and Exponential
Find y.t / D Au.t / e
˛t
u.t /, ˛ > 0
For t 0 there is no overlap so Y .t / D 0
No overlap
λ
t
2-56
0
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
For t > 0 there is always overlap
t
Z
y.t / D
Ae
˛.t /
d
0
D Ae
˛t
D Ae
˛t
e ˛ ˇˇt
ˇ
˛ 0
e ˛t 1
˛
For t > 0 there is
always overlap
λ
t
0
Summary,
y.t / D
A
1
˛
e
˛t
u.t /
A/α
y(t)
0
ECE 5625 Communication Systems I
t
2-57
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Direct Approach for the FT of a Periodic Signal
The FT of a periodic signal can be found directly by expanding
x.t / as follows
" 1
#
1
X
X
x.t / D
ı.t mTs / p.t / D
p.t mTs /
mD 1
mD 1
where p.t / represents one period of x.t /, having period Ts
From the convolution theorem
( 1
X
X.f / D F
ı.t
)
mTs / P .f /
mD 1
1
X
D fs P .f /
ı.f
nfs /
nD 1
1
X
D fs
P .nfs /ı.f
nfs /
nD 1
where P .f / D Ffp.t /g
The FT transform pair just established is
1
X
mD 1
2-58
p.t
mTs /
F
!
1
X
fs P .nfs /ı.f
nfs /
nD 1
ECE 5625 Communication Systems I
2.5. FOURIER TRANSFORM
Example 2.19: p.t / D ….t =2/ C ….t =4/, T0 D 10
x(t)
2
...
1
...
t
-2
-1
0
1
2
T0 = 10
Stacked pulses periodic signal
We begin by finding P .f / using Ff….t = /g D sinc.f /
P .f / D 2sinc.2f / C 4sinc.4f /
Plugging into the FT pair derived above with nfs D n=10,
1 n
1 X
2n
n
X.f / D
2sinc
C 4sinc
ı f
10 nD 1
5
5
10
2.5.7
Poisson Sum Formula
The Poisson sum formula from mathematics can be derived
using the FT pair
e
j 2.nfs /t
by writing
( 1
X
1
F
fs P .nfs /ı.f
nD 1
ECE 5625 Communication Systems I
F
! ı.f
nfs /
)
1
X
nfs / D fs
P .nfs /e j 2.nfs /t
nD 1
2-59
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
From the earlier developed FT of periodic signals pair, we
know that the left side of the above is also equal to
1
X
p.t
also
mTs / D fs
mD 1
1
X
P .nfs /e j 2.nfs /t
nD 1
We can finally relate this back to the Fourier series coefficients,
i.e.,
Xn D fs P .nfs /
2.6
Power Spectral Density and Correlation
For energy signals we have the energy spectral density, G.f /,
defined such that
Z 1
ED
G.f / df
1
For power signals we can define the power spectral density
(PSD), S.f / of x.t / such that
Z 1
S.f / df D hjx.t /j2i
P D
1
– Note: S.f / is real, even and nonnegative
– If x.t / is periodic S.f / will consist of impulses at the
harmonic locations
For x.t / D A cos.!0t C /, intuitively,
1
S.f / D A2ı.f
4
2-60
1
f0/ C A2ı.f C f0/
4
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
since S.f / df D A2=2 as expected (power on a per ohm
basis)
R
To derive a general formula for the PSD we first need to consider the autocorrelation function
2.6.1
The Time Average Autocorrelation Function
Let . / be the autocorrelation function of an energy signal
˚
. / D F 1 G.f /
˚
1
D F X.f /X .f /
˚
˚ 1
1
D F X.f / F X .f /
F
! X .f / for x.t / real, so
Z 1
x.t /x.t C / d . / D x.t / x. t / D
but x. t /
1
or
Z
T
x.t /x.t C / d . / D lim
T !1
T
Observe that
˚
G.f / D F . /
The autocorrelation function (ACF) gives a measure of the
similarity of a signal at time t to that at time t C ; the coherence between the signal and the delayed signal
ECE 5625 Communication Systems I
2-61
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
X(f)
G(f) = |X(f)|2
x(t)
φ(τ) =
Energy spectral density and signal relationships
2.6.2
Power Signal Case
For power signals we define the autocorrelation function as
Rx . / D hx.t /x.t C /i
Z T
1
D lim
x.t /x.t C / dt
T !1 2T
Z T
if periodic 1
x.t /x.t C / dt
D
T0 T0
Note that
Z
2
1
Rx .0/ D hjx.t /j i D
Sx .f / df
1
and since for energy signals . /
assumption is that
Rx . /
2-62
F
! G.f /, a reasonable
F
! Sx .f /
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
A formal statement of this is the Wiener-Kinchine theorem (a
proof is given in text Chapter 7)
Z 1
Sx .f / D
Rx . /e j 2f d 1
x(t)
Rx(τ)
Sx(f)
Power spectral density (PSD) and signal relationships
2.6.3
Properties of R. /
The following properties hold for the autocorrelation function
1. R.0/ D hjx.t /j2i jR. /j for all values of 2. R. / D hx.t /x.t
/i D R. / ) an even function
3. limjj!1 R. / D hx.t /i2 if x.t / is not periodic
4. If x.t / is periodic, with period T0, then R. / D R. CT0/
5. FfR. /g D S.f / 0 for all values of f
The power spectrum and autocorrelation function are frequently
used for systems analysis with random signals
For the case of random signal, x.t /, the Fourier transform
X.f / is also a random signal, but now in the frequency domain
The autocorrelation and PSD of x.t /, under typical assumptions, are both deterministic functions; this turns out to be vital
in problem solving in Comm II and beyond
ECE 5625 Communication Systems I
2-63
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.20: Single Sinusoid
Consider the signal x.t / D A cos.2f0t C /, for all t
Z
1 T0 2
Rx . / D
A cos.2f0t C / cos.2.t C / C / dt
T0 0
Z
A2
D
cos.2f0 / C cos.2.2f0/t C 2f0 C 2 / dt
2T0 T0
A2
cos.2f0 /
D
2
Note that
˚
A2 F Rx . / D Sx .f / D
ı.f
4
f0/ C ı.f C f0/
More Autocorrelation Function Properties
Suppose that x.t / has autocorrelation function Rx . /
Let y.t / D A C x.t /, A D constant
Ry . / D hŒA C x.t /ŒA C x.t C /i
D hA2i C hAx.t C /i C hAx.t /i C hx.t /x.t C /i
D A2 C 2Ahx.t /i CRx . /
ƒ‚
…
„
const. terms
Let z.t / D x.t
t0 /
Rz . / D hz.t /z.t C /i D hx.t t0/x.t t0 C i
D hx./x. C /i; with D t t0
D Rx . /
2-64
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
The last result shows us that the autocorrelation function is
blind to time offsets
Example 2.21: Sum of Two Sinusoids
Consider the sum of two sinusoids
y.t / D x1.t / C x2.t /
where x1.t / D A1 cos.2f1tC1/ and x2.t / D A2 cos.2f2tC
2/ and we assume that f1 ¤ f2
Using the definition
Ry . / D hŒx1.t / C x2.t /Œx1.t C /x2.t C /i
D hx1.t /x1.t C /i C hx2.t /x2.t C /i
C hx1.t /x2.t C /i C hx2.t /x1.t C /i
The last two terms are zero since hcos..!1 ˙ !2/t /i D 0 when
f1 ¤ f2 (why?), hence
Ry . / D Rx1 . / C Rx2 . /; for f1 ¤ f2
A21
A22
cos.2f1 / C
cos.2f2 /
D
2
2
Example 2.22: PN Sequences
In the testing and evaluation of digital communication systems
a source of known digital data (i.e., ‘1’s and ‘0’s) is required
(see also text Chapter 10 p. 524–527)
ECE 5625 Communication Systems I
2-65
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
A maximal length sequence generator or pseudo-noise (PN)
code is often used for this purpose
Practical implementation of a PN code generator can be accomplished using an N -stage shift register with appropriate
exclusive-or feedback connections
The sequence length or period of the resulting PN code is M D
2N 1 bits long
Clock
Period = T
C
C
Q1
D1
D2
C
Q2
D3
x(t)
Q3
M = 23 - 1 = 7
x(t)
+A
t
-A
one period = MT
Three stage PN (m-sequence) generator using logic circuits
PN sequences have quite a number of properties, one being that
the time average autocorrelation function is of the form shown
below
2-66
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
Rx(τ)
A2
MT
...
-T
...
T
τ
MT
-A2/M
PN sequence autocorrelation function
The calculation of the power spectral density will be left as a
homework problem (a specific example is text Example 2.20)
– Hint: To find Sx .f / D FfRx . /g we use
X
X
F
p.t nTs / ! fs
P .nfs /ı.f
n
nfs /
n
where Ts D M T
– One period of Rx . / is a triangle pulse with a level shift
Suppose the logic levels are switched from ˙A to positive levels of say v1 to v2
– Using the additional autocorrelation function properties
this can be done
– You need to know that a PN sequence contains one more
‘1’ than ‘0’
Python code for generating PN sequences from 2 to 12 stages
plus 16, is found ssd.py:
def PN_gen(N_bits,m=5):
"""
Maximal length sequence signal generator.
ECE 5625 Communication Systems I
2-67
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Generates a sequence 0/1 bits of N_bit duration. The bits themselves are obtained
from an m-sequence of length m. Available m-sequence (PN generators) include
m = 2,3,...,12, & 16.
Parameters
---------N_bits : the number of bits to generate
m : the number of shift registers. 2,3, .., 12, & 16
Returns
------PN : ndarray of the generator output over N_bits
Notes
----The sequence is periodic having period 2**m - 1 (2^m - 1).
Examples
------->>> # A 15 bit period signal nover 50 bits
>>> PN = PN_gen(50,4)
"""
c = m_seq(m)
Q = len(c)
max_periods = int(np.ceil(N_bits/float(Q)))
PN = np.zeros(max_periods*Q)
for k in range(max_periods):
PN[k*Q:(k+1)*Q] = c
PN = np.resize(PN, (1,N_bits))
return PN.flatten()
def m_seq(m):
"""
Generate an m-sequence ndarray using an all-ones initialization.
Available m-sequence (PN generators) include m = 2,3,...,12, & 16.
Parameters
---------m : the number of shift registers. 2,3, .., 12, & 16
Returns
------c : ndarray of one period of the m-sequence
Notes
----The sequence period is 2**m - 1 (2^m - 1).
Examples
------->>> c = m_seq(5)
"""
# Load shift register with all ones to start
sr = np.ones(m)
# M-squence length is:
Q = 2**m - 1
c = np.zeros(Q)
2-68
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
if m == 2:
taps = np.array([1, 1, 1])
elif m == 3:
taps = np.array([1, 0, 1, 1])
elif m == 4:
taps = np.array([1, 0, 0, 1, 1])
elif m == 5:
taps = np.array([1, 0, 0, 1, 0, 1])
elif m == 6:
taps = np.array([1, 0, 0, 0, 0, 1, 1])
elif m == 7:
taps = np.array([1, 0, 0, 0, 1, 0, 0, 1])
elif m == 8:
taps = np.array([1, 0, 0, 0, 1, 1, 1, 0, 1])
elif m == 9:
taps = np.array([1, 0, 0, 0, 0, 1, 0, 0, 0, 1])
elif m == 10:
taps = np.array([1, 0, 0, 0, 0, 0, 0, 1, 0, 0, 1])
elif m == 11:
taps = np.array([1, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 1])
elif m == 12:
taps = np.array([1, 0, 0, 0, 0, 0, 1, 0, 1, 0, 0, 1, 1])
elif m == 16:
taps = np.array([1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 1, 1])
else:
print 'Invalid length specified'
for n in range(Q):
tap_xor = 0
c[n] = sr[-1]
for k in range(1,m):
if taps[k] == 1:
tap_xor = np.bitwise_xor(tap_xor,np.bitwise_xor(int(sr[-1]),
int(sr[m-1-k])))
sr[1:] = sr[:-1]
sr[0] = tap_xor
return c
R. /, S.f /, and Fourier Series
For a periodic power signal, x.t /, we can write
1
X
x.t / D
Xne j 2.nf0/t
nD 1
There is an interesting linkage between the Fourier series representation of a signal, the power spectrum, and then back to
the autocorrelation function
ECE 5625 Communication Systems I
2-69
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Using the orthogonality properties of the Fourier series expansion we can write
* 1
!
!+
1
X
X
R. / D
Xne j 2.nf0/t
Xme j 2.mf0/.tC/
D
nD 1
1
1
X X
mD 1
XnXm
nD 1 mD 1
D
D
1
X
nD 1
1
X
˝ j 2.nf t/ j 2.mf /.tC/˛
0 e
0
e
ƒ‚
…
„
n¤m terms are zero, why?
˝
jXnj2 e j 2.nf0/t e
j 2.nf0 /.tC/
˛
jXnj2e j 2.nf0/
nD 1
The power spectral density can be obtained by Fourier transforming both sides of the above
S.f / D
1
X
jXnj2ı.f
nf0/
nD 1
Example 2.23: PN Sequence Analysis and Simulation
In this example I consider an N D 4 or M D 15 generator
from two points of view:
1. First using the FFT to calculate the Fourier coefficients
Xn using one period of the waveform (in discrete-time I
use 10 samples per bit)
2. Second, I just generate a waveform of 10,000 bits (again
at 10 samples per bit) and use standard signal processing
2-70
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
tools to estimate the time average autocorrelation function
and the PSD
Numerical Fourier Series Analysis: Generate one period of
the waveform using ssd.m_seq(4) and then upsample and interpolate to create a waveform of 10 samples per bit
The waveform amplitude levels are Œ0; 1 so there is a large
DC component visible in the spectrum (why?); eight ones and
seven zeros makes the average value X0 D 8=15 D 0:533
The function ssd.m_seq() returns an array of zeros and ones
of length 15, i.e., len(x_PN4) = 15
To create a waveform I upsample the signal by 10 and then
filter using a finite impulse response of exactly 10 ones
To plot the line spectrum I use the ssd.line_spectra() function used earlier
ECE 5625 Communication Systems I
2-71
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
15 bit
period
Line spacing =
1/(MT) = 1/15 Hz
DC line 0.533 (-5.46 dB)
f = 1/T = 1 Hz
sinc 2 ( x ) spect. shape
Fourier series based spectral analysis of PN code
2-72
ECE 5625 Communication Systems I
2.6. POWER SPECTRAL DENSITY AND CORRELATION
...
...
MT = 15T = 15
-1 -1
=
M
15
–1
1
Same spectral shape and line spacing
as direct FS analysis; scaling with
PSD function is different however
DC different
as waveform
values are
[-1,1]
Using simulation to estimate Ry ./ and Sy .f / of a PN code
In generating an estimate of the autocorrelation function I use
the FFT to find the time averaged autocorrelation function in
the frequency domain
In generating the spectral estimate, the Python function psd()(from
matplotlib) function uses Welch’s method of averaged periodograms 1
Here the PSD estimate uses a 4096 point FFT and assumed
sampling rate of 10 Hz; the spectral resolution is 10/4096 =
0.002441 Hz
1
http://en.wikipedia.org/wiki/Periodogram
ECE 5625 Communication Systems I
2-73
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.7
Linear Time Invariant (LTI) Systems
x(t)
y(t) =
operator
Linear system block diagram
Definition
Linearity (superposition) holds, that is for input ˛1x1.t /C˛2x2.t /,
˛1 and ˛2 constants,
y.t / D H ˛1x1.t / C ˛2x2.t /
D ˛1H x1.t / C ˛2H x2.t /
D ˛1y1.t / C ˛2y2.t /
A system is time invariant (fixed) if for y.t / D HŒx.t /, a
delayed input gives a correspondingly delayed output, i.e.,
y.t t0/ D H x.t t0/
Impulse Response and Superposition Integral
The impulse response of an LTI system is denoted
h.t / D H ı.t /
assuming the system is initially at rest
Suppose we can write x.t / as
x.t / D
N
X
˛nı.t
tn /
nD1
2-74
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
For an LTI system with impulse response h. /
N
X
y.t / D
˛nh.t
tn /
nD1
To develop the superposition integral we write
Z 1
x.t / D
x./ı.t / d 1
' lim
N !1
N
X
x.nt /ı.t
nt / t; for t 1
nD N
Rectangle area is approximation
x(t)
...
...
−∆t
∆t
0
2∆t
3∆t
4∆t
5∆t
6∆t
t
Impulse sequence approximation to x.t/
If we apply H to both sides and let t ! 0 such that nt ! we have
y.t / ' lim
N
X
N !1
Z
nD N
x./h.t
Z
nt / t
1
D
or
x.nt /h.t
/ d D x.t / h.t /
1
1
D
x.t
/h. / d D h.t / x.t /
1
ECE 5625 Communication Systems I
2-75
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.7.1
Stability
In signals and systems the concept of bounded-input boundedoutput (BIBO) stability is introduced
Satisfying this definition requires that every bounded-input (jx.t /j <
1) produces a bounded output (jy.t /j < 1)
For LTI systems a fundamental theorem states that a system is
BIBO stable if and only if
Z 1
jh.t /j dt < 1
1
Further implications of this will be discussed later
2.7.2
Transfer Function
The frequency domain result corresponding to the convolution
expression y.t / D x.t / h.t / is
Y .f / D X.f /H.f /
where H.f / is known as the transfer function or frequency
response of the system having impulse response h.t /
It immediately follows that
h.t /
F
! H.f /
and
˚
1
y.t / D F X.f /H.f / D
Z
1
X.f /H.f /e j 2f t df
1
2-76
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
2.7.3
Causality
A system is causal if the present output relies only on past and
present inputs, that is the output does not anticipate the input
The fact that for LTI systems y.t / D x.t / h.t / implies that
for a causal system we must have
h.t / D 0; t < 0
– Having h.t / nonzero for t < 0 would incorporate future
values of the input to form the present value of the output
Systems that are causal have limitations on their frequency response,
in particular the Paley–Wiener theorem states that for
R1
2
1 jh.t /j dt < 1, H.f / for a causal system must satisfy
Z
1
j ln jH.f /jj
df < 1
2
1
C
f
1
In simple terms this means:
1. We cannot have jH.f /j D 0 over a finite band of frequencies (isolated points ok)
2. The roll-off rate of jH.f /j cannot be too great, e.g., e k1jf j
2
andpe k2jf j are not allowed, but polynomial forms such
as 1=.1 C .f =fc /2N , N an integer, are acceptable
3. Practical filters such as Butterworth, Chebyshev, and elliptical filters can come close to ideal requirements
ECE 5625 Communication Systems I
2-77
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.7.4
Properties of H.f /
For h.t / real it follows that
jH. f /j D jH.f /j and †H. f / D
†H.f /
why?
Input/output relationships for spectral densities are
Gy .f / D jY .f /j2 D jX.f /H.f /j2 D jH.f /j2Gx .f /
Sy .f / D jH.f /j2Sx .f / proof in text chap. 6
Example 2.24: RC Lowpass Filter
R
x(t)
X(f )
vc(t)
y(t)
ic(t)
C
Y(f )
h(t), H(f)
RC lowpass filter schematic
To find H.f / we may solve the circuit using AC steady-state
analysis
1
1
Y .j!/
j!c
D
D
1
X.j!/
1 C j!RC
R C j!c
so
H.f / D
2-78
Y .f /
1
D
; where f3 D 1=.2RC /
X.f /
1 C jf =f3
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
From the circuit differential equation
x.t / D ic .t /R C y.t /
but
ic .t / D c
y.t /
dvc .t /
Dc
dt
dt
thus
RC
dy.t /
C y.t / D x.t /
dt
FT both sides using dx=dt
F
! j 2f X.f /
j 2f RC Y .f / C Y .f / D X.f /
so again
Y .f /
1
D
X.f /
1 C jf =f3
1
Dp
e j tan
1 C .f =f3/2
H.f / D
1 .f =f /
3
The Laplace transform could also be used here, and perhaps is
preferred, we just need to substitute s ! j! ! j 2f
ECE 5625 Communication Systems I
2-79
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
1
f
f3
-f3
π/2
f
-π/2
RC lowpass frequency response
Find the system response to
x.t / D A…
.t
T =2/
T
Finding Y .f / is easy since
1
Y .f / D X.f /H.f / D AT sinc.f T /
e
1 C jf =fs
jf t
To find y.t / we can IFT the above, use Laplace transforms, or
convolve directly
From the FT tables we known that
h.t / D
2-80
1
e
RC
t=.RC /
u.t /
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
In Example 2.18 we showed that
Au.t / e
˛t
A
1
u.t / D
˛
e
˛t
u.t /
Note that
A…
t
T =2
T
D AŒu.t /
u.t
T /
and here ˛ D 1=.RC /, so
A
t=.RC /
u.t /
RC 1 e
y.t / D
RC
A
.t T /=.RC /
RC 1 e
u.t
RC
T/
RC =
|X(f)|, |H(f)|, |Y(f)|
T/1
0
T/
5
y(t)
1
0.8
T/
2
0.8
0.6
1
0.6
0.4
T
0.4
0.2
2T
0.2
0.5
1
1.5
2
2.5
3
t/T
-3
-2
-1
1
0.8
0.6
0.6
RC = T/2
0.4
0.2
-1
2
3
fT
|X(f)|, |H(f)|, |Y(f)|
0.8
0.4
-2
1
1
|X(f)|, |H(f)|, |Y(f)|
-3
RC = 2T
RC = T/10
0.2
1
2
3
fT
-3
-2
-1
1
2
3
fT
Pulse time response and frequency spectra with A D 1
ECE 5625 Communication Systems I
2-81
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.7.5
Input/Output with Spectral Densities
We know that for an LTI system with frequency response H.f /
and input Fourier transform X.f /, the output Fourier transform is given by Y .f / D H.f /X.f /
It is easy to show that in terms of energy spectral density
Gy .f / D jH.f /j2 Gx .f /
where Gx .f / D jX.f /j2 and Gy .f / D jY .f /j2
For the case of power signals a similar relationship holds with
the power spectral density (proof found in Chapter text 7, i.e.,
Comm II)
Sy .f / D jH.f /j2 Sx .f /
2.7.6
Response to Periodic Inputs
When the input is periodic we can write
1
X
x.t / D
Xne j 2.nf0/t
nD 1
which implies that
1
X
X.f / D
Xnı.f
nf0/
nD 1
It then follows that
Y .f / D
1
X
XnH.nf0/ı.f
nf0/
nD 1
2-82
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
and
y.t / D
D
1
X
nD 1
1
X
XnH.nf0/e j 2.nf0/t
jXnjjH.nf0je j Œ2.nf0/t C†XnC†H.nf0/
nD 1
This is a steady-state response calculation, since the analysis
assumes that the periodic signal was applied to the system at
tD 1
2.7.7
Distortionless Transmission
In the time domain a distortionless system is such that for any
input x.t /,
y.t / D H0x.t t0/
where H0 and t0 are constants
In the frequency domain the implies a frequency response of
the form
H.f / D H0e j 2f t0 ;
that is the amplitude response is constant and the phase shift is
linear with frequency
Distortion types:
1. Amplitude response is not constant over a frequency band
(interval) of interest $ amplitude distortion
2. Phase response is not linear over a frequency band of interest $ phase distortion
ECE 5625 Communication Systems I
2-83
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
3. The system is non-linear, e.g., y.t / D k0 C k1x.t/ C
k2x 2.t / $ nonlinear distortion
2.7.8
Group and Phase Delay
The phase distortion of a linear system can be characterized
using group delay, Tg .f /,
Tg .f / D
1 d.f /
2 df
where .f / is the phase response of an LTI system
Note that for a distortionless system .f / D
Tg .f / D
1 d
2 df
2f t0, so
2f t0 D t0 s;
clearly a constant group delay
Tg .f / is the delay that two or more frequency components
undergo in passing through an LTI system
– If say Tg .f1/ ¤ Tg .f2/ and both of these frequencies are
in a band of interest, then we know that delay distortion
exists
– Having two different frequency components arrive at the
system output at different times produces signal dispersion
An LTI system passing a single frequency component, x.t / D
A cos.2f1t /, always appears distortionless since at a single
2-84
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
frequency the output is just
y.t / D AjH.f1/j cos 2f1t C .f1/
.f1/
D AjH1.f /j cos 2f1 t
2f1
which is equivalent to a delay known as the phase delay
.f /
2f
Tp .f / D
The system output now is
y.t / D AjH.f1/j cos 2f1.t
Tp .f1//
Note that for a distortionless system
Tp .f / D
1
. 2f t0/ D t0
2f
Example 2.25: Terminated Lossless Transmission Line
Rs = R0
R0, vp
x(t)
RL = R0
y(t)
L
1
y.t / D x t
2
L
vp
Lossless transmission line
ECE 5625 Communication Systems I
2-85
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
We conclude that H0 D 1=2 and t0 D L=vp
Note that a real transmission line does have losses that introduces dispersion on a wideband signal
Example 2.26: A Fictitious System
Ampl.
Radians
1.5
H(f)
2
|H(f)|
1
1.5
0.5
1
-20
-10
10
20
f (Hz)
-0.5
0.5
-1
-20
-10
10
20
f (Hz)
-1.5
Time
Tg(f)
Time
Tp(f)
0.015
0.0125
0.015
0.01
0.014
0.0075
0.013
0.005
0.012
0.0025
-20
0.016
-10
0.011
f (Hz)
10
20
-20
-10
10
20
f (Hz)
No distortion on |f | < 10 Hz band
Amplitude, phase, group delay, phase delay
The system in this example is artificial, but the definitions can
be observed just the same
For signals with spectral content limited to jf j < 10 Hz there
is no distortion, amplitude or phase/group delay
2-86
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
For 10 < jf j < 15 amplitude distortion is present
For jf j > 15 both amplitude and phase distortion are present
What about the interval 10 < jf j < 15?
2.7.9
Nonlinear Distortion
In the time domain a nonlinear system may be written as
y.t / D
1
X
anx n.t /
nD0
Specifically consider
y.t / D a1x.t / C a2x 2.t /
Let
x.t / D A1 cos.!1t / C A2 cos.!2t /
Expanding the output we have
y.t / D a1 A1 cos.!1t / C A2 cos.!2t /
2
C a1 A1 cos.!1t / C A2 cos.!2t /
D a1 A1 cos.!1t / C A2 cos.!2t /
na
a2 2
o
2
2
2
2
A CA C
A cos.2!1t / C A2 cos.2!2t /
C
2 1˚ 2
2 1
C a2A1A2 cosŒ.!1 C !2/t C cosŒ.!1 !2/t
– The third line is the desired output
ECE 5625 Communication Systems I
2-87
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
– The fourth line is termed harmonic distortion
– The fifth line is termed intermodulation distortion
Input
Output
a1A1
2
a2A1
A1
2
NonLinear
0
f
f1
Input
2
f1
0
2
A2
f
2f1
a1A1A2
Output
NonLinear
A1
2
a2A1
2
a1a2A1
2
a2A1
a1A1
2
a1A2 2
a2(A1 + A2)
2
a2A2
2
0
f1
f2
f
0 f2-f1
f1
f2
2f1
2f2
f
f1+f2
One and two tones in y.t/ D a1 x.t/ C a2 x 2 .t/ device
In general if y.t / D a1x.t / C a2x 2.t / the multiplication theorem implies that
Y .f / D a1X.f / C a2X.f / X.f /
In particular if X.f / D A… f =.2W /
f
Y .f / D a1A…
2W
2-88
f
C a22WA2ƒ
2W
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
Y( f ) =
2Wa2A2
a 1A
-W
+
f
W
-2W
f
2W
a1A + 2Wa2A2
a1A + Wa2A2
Wa2A2
=
-2W -W
f
W 2W
Continuous spectrum in y.t/ D a1 x.t/ C a2 x 2 .t/ device
2.7.10
Ideal Filters
1. Lowpass of bandwidth B
f
HLP.f / D H0…
e
2B
|HLP(f)|
H0
-B
B
j 2f t0
slope =
-2πt0
HLP(f)
f
f
-B
B
2. Highpass with cutoff B
HHP.f / D H0 1
|HHP(f)|
H0
-B
B
ECE 5625 Communication Systems I
….f =.2B// e
slope =
-2πt0
j 2f t0
HHP(f)
f
f
-B
B
2-89
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
3. Bandpass of bandwidth B
f0/ C Hl .f C f0/ e
HBP.f / D Hl .f
j 2f t0
where Hl .f / D H0….f =B/
B
|HBP(f)|
H0
B
slope = -2πt0
HBP(f)
f
-f0
f
f0
-f0
f0
The impulse response of the lowpass filter is
1
˚
hLP.t / D F H0….f =.2B//e
D 2BH0sincŒ2B.t t0/
j 2f t0
Ideal filters are not realizable, but simplify calculations and
give useful performance upper bound results
– Note that hLP.t / ¤ 0 for t < 0, thus the filter is noncausal
and unrealizable
From the modulation theorem it also follows that
hBP.t / D 2hl .t t0/ cosŒ2f0.t t0/
D 2BH0sincŒB.t t0/ cosŒ2f0.t
2-90
t0/
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
hLP(t)
hBP(t)
2BH0
2BH0
t0
t
t0
t0 - 1
2B
t
t0 + 1
2B
t0 - 1
2B
t0 + 1
2B
Ideal lowpass and bandpass impulse responses
2.7.11
Realizable Filters
We can approximate ideal filters with realizable filters such as
Butterworth, Chebyshev, and Bessel, to name a few
We will only consider the lowpass case since via frequency
transformations we can obtain the others
Butterworth
A Butterworth filter has a maximally flat (flat in the sense of
derivatives of the amplitude response at dc being zero) passband
In the s-domain (s D Cj!) the transfer function of a lowpass
design is
HBU.s/ D
.s
!cn
s1/.s s2/ .s
sn/
where
1 2k 1
sk D !c exp C
; k D 1; 2; : : : ; n
2
2n
ECE 5625 Communication Systems I
2-91
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Note that the poles are located on a semi-circle of radius !c D
2fc , where fc is the 3dB cuttoff frequency of the filter
The amplitude response of a Butterworth filter is simply
jHBU.f /j p
1
1 C .f =fc /2n
Butterworth n D 4 lowpass filter
Chebyshev
A Chebyshev type I filter (ripple in the passband), is is designed to maintain the maximum allowable attenuation in the
passband yet have maximum stopband attenuation
The amplitude response is given by
jHC.f /j D p
1
1 C 2Cn2.f /
where
(
Cn.f / D
2-92
cos.n cos 1.f =fc //;
0 jf j fc
cosh.n cosh 1.f =fc //;
jf j > fc
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
The poles are located on an ellipse as shown below
Chebyshev n D 4 lowpass filter
Bessel
A Bessel filter is designed to maintain linear phase in the passband at the expense of the amplitude response
HBE.f / D
Kn
Bn.f /
where Bn.f / is a Bessel polynomial of order n (see text) and
Kn is chosen so that the filter gain is unity at f D 0
ECE 5625 Communication Systems I
2-93
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Amplitude Rolloff and Group Delay Comparision
Compare Butterworth, 0.1 dB ripple Chebyshev, and Bessel
n D 3 Amplitude response
n D 3 Group delay
2-94
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
Despite DSP being pervasive in communication systems, there
is still a great need for analog filter design and implementation
technologies
The table below describes some of the well known construction
techniques
Filter Construction Techniques
Construction
Type
LC (passive)
Description of El- Center Freements or Filter
quency Range
lumped elements
DC–300 MHz
or higher in integrated form
Active
R, C , op-amps
DC–500 kHz
or higher using
WB op-amps
Crystal
quartz crystal
1kHz – 100
MHz
Ceramic
ceramic disks with 10kHz – 10.7
electrodes
MHz
Surface acoustic interdigitated fin- 10-800 MHz,
waves (SAW)
gers on a Piezoelectric substrate
Transmission line quarterwave stubs, UHF and miopen and short ckt crowave
Cavity
machined
and Microwave
plated metal
Unloaded
(typical
100
Q
Filter Application
Audio, video,
IF and RF
200
Audio and low
RF
100,000
IF
1,000
IF
variable
IF and RF
1,000
RF
10,000
RF
Example 2.27: Use Python to Characterize Standard Filters
You can use the filter design capability of Python with Scipy
or MATLAB with the signal processing to study lowpass, bandpass, bandstop, and highpass filters
Here I will consider two functions written in Python, one for
digital filters and one for analog filters, to allow plotting of gain
in dB, phase in radians, and group delay in samples or seconds
ECE 5625 Communication Systems I
2-95
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
def freqz_resp(b,a=[1],mode = 'dB',fs=1.0,Npts = 1024,fsize=(6,4)):
"""
A method for displaying digital filter frequency response magnitude,
phase, and group delay. A plot is produced using matplotlib
freq_resp(self,mode = 'dB',Npts = 1024)
A method for displaying the filter frequency response magnitude,
phase, and group delay. A plot is produced using matplotlib
freqs_resp(b,a=[1],Dmin=1,Dmax=5,mode = 'dB',Npts = 1024,fsize=(6,4))
b
a
Dmin
Dmax
mode
=
=
=
=
=
ndarray of numerator coefficients
ndarray of denominator coefficents
start frequency as 10**Dmin
stop frequency as 10**Dmax
display mode: 'dB' magnitude, 'phase' in radians, or
'groupdelay_s' in samples and 'groupdelay_t' in sec,
all versus frequency in Hz
Npts = number of points to plot; defult is 1024
fsize = figure size; defult is (6,4) inches
Mark Wickert, January 2015
"""
f = np.arange(0,Npts)/(2.0*Npts)
w,H = signal.freqz(b,a,2*np.pi*f)
plt.figure(figsize=fsize)
if mode.lower() == 'db':
plt.plot(f*fs,20*np.log10(np.abs(H)))
plt.xlabel('Frequency (Hz)')
plt.ylabel('Gain (dB)')
plt.title('Frequency Response - Magnitude')
elif mode.lower() == 'phase':
plt.plot(f*fs,np.angle(H))
plt.xlabel('Frequency (Hz)')
plt.ylabel('Phase (rad)')
plt.title('Frequency Response - Phase')
elif (mode.lower() == 'groupdelay_s') or (mode.lower() == 'groupdelay_t'):
"""
Notes
----Since this calculation involves finding the derivative of the
phase response, care must be taken at phase wrapping points
2-96
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
and when the phase jumps by +/-pi, which occurs when the
amplitude response changes sign. Since the amplitude response
is zero when the sign changes, the jumps do not alter the group
delay results.
"""
theta = np.unwrap(np.angle(H))
# Since theta for an FIR filter is likely to have many pi phase
# jumps too, we unwrap a second time 2*theta and divide by 2
theta2 = np.unwrap(2*theta)/2.
theta_dif = np.diff(theta2)
f_diff = np.diff(f)
Tg = -np.diff(theta2)/np.diff(w)
max_Tg = np.max(Tg)
#print(max_Tg)
if mode.lower() == 'groupdelay_t':
max_Tg /= fs
plt.plot(f[:-1]*fs,Tg/fs)
plt.ylim([0,1.2*max_Tg])
else:
plt.plot(f[:-1]*fs,Tg)
plt.ylim([0,1.2*max_Tg])
plt.xlabel('Frequency (Hz)')
if mode.lower() == 'groupdelay_t':
plt.ylabel('Group Delay (s)')
else:
plt.ylabel('Group Delay (samples)')
plt.title('Frequency Response - Group Delay')
else:
s1 = 'Error, mode must be "dB", "phase, '
s2 = '"groupdelay_s", or "groupdelay_t"'
print(s1 + s2)
def freqs_resp(b,a=[1],Dmin=1,Dmax=5,mode = 'dB',Npts = 1024,fsize=(6,4)):
"""
A method for displaying analog filter frequency response magnitude,
phase, and group delay. A plot is produced using matplotlib
freqs_resp(b,a=[1],Dmin=1,Dmax=5,mode='dB',Npts=1024,fsize=(6,4))
b
a
Dmin
Dmax
mode
=
=
=
=
=
ndarray of numerator coefficients
ndarray of denominator coefficents
start frequency as 10**Dmin
stop frequency as 10**Dmax
display mode: 'dB' magnitude, 'phase' in radians, or
'groupdelay', all versus log frequency in Hz
Npts = number of points to plot; defult is 1024
ECE 5625 Communication Systems I
2-97
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
fsize = figure size; defult is (6,4) inches
Mark Wickert, January 2015
"""
f = np.logspace(Dmin,Dmax,Npts)
w,H = signal.freqs(b,a,2*np.pi*f)
plt.figure(figsize=fsize)
if mode.lower() == 'db':
plt.semilogx(f,20*np.log10(np.abs(H)))
plt.xlabel('Frequency (Hz)')
plt.ylabel('Gain (dB)')
plt.title('Frequency Response - Magnitude')
elif mode.lower() == 'phase':
plt.semilogx(f,np.angle(H))
plt.xlabel('Frequency (Hz)')
plt.ylabel('Phase (rad)')
plt.title('Frequency Response - Phase')
elif mode.lower() == 'groupdelay':
"""
Notes
----See freqz_resp() for calculation details.
"""
theta = np.unwrap(np.angle(H))
# Since theta for an FIR filter is likely to have many pi phase
# jumps too, we unwrap a second time 2*theta and divide by 2
theta2 = np.unwrap(2*theta)/2.
theta_dif = np.diff(theta2)
f_diff = np.diff(f)
Tg = -np.diff(theta2)/np.diff(w)
max_Tg = np.max(Tg)
#print(max_Tg)
plt.semilogx(f[:-1],Tg)
plt.ylim([0,1.2*max_Tg])
plt.xlabel('Frequency (Hz)')
plt.ylabel('Group Delay (s)')
plt.title('Frequency Response - Group Delay')
else:
print('Error, mode must be "dB" or "phase or "groupdelay"')
2-98
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
Case 1: A 5th-order Chebyshev type 1 digital bandpass filter,
having 1 dB ripple and passband of Œ250; 300 Hz relative to a
sampling rate of fs D 1000 Hz
5th-OrderCheby1 BPF
Digital
fs = 1000 Hz
Highly peaked
near the bandedge, even with
0.1 dB rippler
Digtal bandpass with fs D 1000Hz (Chebyshev)
The Chebyshev in both analog and digital forms still has a large
peak in the group delay, even with a small ripple (here 0.1 dB)
ECE 5625 Communication Systems I
2-99
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Case 2: A 7th-order Bessel analog bandpass filter, having passband of Œ10; 50 MHz
7th-Order
Bessel BPF
Analog
Not 3dB bandwidth
Group delay relatively flat
in passband, compared
with Chebyshev
Analog bandpass (Bessel)
The Bessel filter has a much lower and smoother group delay,
but the magnitude response is rather sloppy
The filter passband is far from being flat and the roll-off is
gradual considering the filter order is seven
2-100
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
2.7.12
Pulse Resolution, Risetime, and Bandwidth
Problem: Given a non-bandlimited signal, what is a reasonable estimate of the signals transmission bandwidth?
We would like to obtain a relationship to the signals time duration
Step 1: We first consider a time domain relationship by seeking
a constant T such that
Z
Make areas
equal via T
1
T x.0/ D
x(0)
jx.t /j dt
|x(t)|
1
t
-T/2
Note that
Z 1
Z
1
x.t / dt D
1
1
and
Z
0
ˇ
ˇ
x.t /e j 2f t dt ˇˇ
1
T/2
D X.0/
f D0
Z
1
jx.t /j dt 1
x.t / dt
1
which implies
T x.0/ X.0/
Step 2: Find a constant W such that
ECE 5625 Communication Systems I
2-101
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Z
Make areas
equal via W
1
2W X.0/ D
X(0)
jX.f /j df
|X(f)|
1
f
-W
Note that
Z 1
Z
1
X.f / df D
1
and
1
Z
0
ˇ
ˇ
j 2f t
X.f /e
df ˇˇ
W
D x.0/
t D0
1
Z
1
jX.f /j df X.f / df
1
1
which implies that
2W X.0/ x.0/
Combining the results of Step 1 and Step 2, we have
2W X.0/ x.0/ or
2W 1
T
or
1
X.0/
T
W 1
2T
Example 2.28: Rectangle Pulse
Consider the pulse x.t / D ….t =T /
We know that X.f / D T sinc.f T /
2-102
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
x(t)
-1
|X(f)|/T
1
-0.5
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0.5
1
t/T
-3
-2
-1
Lower
bound for
W
1
2
3
fT
f
-1/(2T) 1/(2T)
Pulse width versus Bandwidth, is W 1=.2T ?
We see that for the case of the sinc. / function the bandwidth,
W , is clearly greater than the simple bound predicts
Risetime
There is also a relationship between the risetime of a pulse-like
signal and bandwidth
Definition: The risetime, TR , is the time required for the leading edge of a pulse to go from 10% to 90% of its final value
Given the impulse response h.t / for an LTI system, the step
response is just
Z 1
ys .t / D
h./u.t / d Z t1
Z t
if causal
D
h./ d D
h./ d 1
ECE 5625 Communication Systems I
0
2-103
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
Example 2.29: Risetime of RC Lowpass
The RC lowpass filter has impulse response
h.t / D
1
e
RC
t=.RC /
u.t /
The step response is
ys .t / D 1
e
t=.RC /
u.t /
The risetime can be obtained by setting ys .t1/ D 0:1 and ys .t2/ D
0:9
t1
0:1 D 1 e t1=.RC / ) ln.0:9/ D
RC
t2
0:9 D 1 e t2=.RC / ) ln.0:1/ D
RC
The difference t2
TR D t 2
t1 is the risetime
t1 D RC ln.0:9=0:1/ ' 2:2RC D
0:35
f3
where f3 is the RC lowpass 3dB frequency
Example 2.30: Risetime of Ideal Lowpass
The risetime of an ideal lowpass filter is of interest since it is
used in modeling and also to see what an ideal filter does to a
step input
2-104
ECE 5625 Communication Systems I
2.7. LINEAR TIME INVARIANT (LTI) SYSTEMS
The impulse response is
f
h.t / D F 1 …
D 2BsincŒ2Bt
2B
The step response then is
Z t
ys D
2BsincŒ2B d 1
Z
1 2Bt sin u
du
D
1
u
1
1
D C SiŒ2Bt
2 where Si( ) is a special function known as the sine integral
We can numerically find the risetime to be
TR '
Step Response of RC Lowpass
0:44
B
Step Response of Ideal Lowpass
1
1
0.8
0.8
0.6
0.4
0.6
2.2
0.4
0.2
0.44
0.2
1
2
3
4
5
t RC
-2
-1
1
2
3
t/B
RC and ideal lowpass risetime comparison
ECE 5625 Communication Systems I
2-105
CHAPTER 2. SIGNAL AND LINEAR SYSTEM ANALYSIS
2.8
Sampling Theory
Integrate with Chapter 3 material.
2.9
The Hilbert Transform
Integrate with Chapter 3 material.
2.10
The Discrete Fourier Transform and
FFT
?
2-106
ECE 5625 Communication Systems I
2.10. THE DISCRETE FOURIER TRANSFORM AND FFT
.
ECE 5625 Communication Systems I
2-107