Solutions to Problems in Goldstein, Classical Mechanics, Second
advertisement

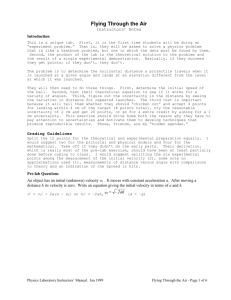
Solutions to Problems in Goldstein, Classical Mechanics, Second Edition Homer Reid August 22, 2000 Chapter 1 Problem 1.1 A nucleus, originally at rest, decays radioactively by emitting an electron of momentum 1.73 MeV/c, and at right angles to the direction of the electron a neutrino with momentum 1.00 MeV/c. ( The MeV (million electron volt) is a unit of energy, used in modern physics, equal to 1.60 x 10−6 erg. Correspondingly, MeV/c is a unit of linear momentum equal to 5.34 x 10−17 gm-cm/sec.) In what direction does the nucleus recoil? What is its momentum in MeV/c? If the mass of the residual nucleus is 3.90 x 10−22 gm, what is its kinetic energy, in electron volts? Place the nucleus at the origin, and suppose the electron is emitted in the positive y direction, and the neutrino in the positive x direction. Then the resultant of the electron and neutrino momenta has magnitude p |pe+ν | = (1.73)2 + 12 = 2 MeV/c, and its direction makes an angle θ = tan−1 1.73 = 60◦ 1 with the x axis. The nucleus must acquire a momentum of equal magnitude and directed in the opposite direction. The kinetic energy of the nucleus is T = 4 MeV2 c−2 1.78 · 10−27 gm p2 = · = 9.1 ev −22 2m 2 · 3.9 · 10 gm 1 MeV c−2 This is much smaller than the nucleus rest energy of several hundred GeV, so the non-relativistic approximation is justified. 1 2 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 Problem 1.2 The escape velocity of a particle on the earth is the minimum velocity required at the surface of the earth in order that the particle can escape from the earth’s gravitational field. Neglecting the resistance of the atmosphere, the system is conservative. From the conservation theorem for potential plus kinetic energy show that the escape velocity for the earth, ignoring the presence of the moon, is 6.95 mi/sec. If the particle starts at the earth’s surface with the escape velocity, it will just manage to break free of the earth’s field and have nothing left. Thus after it has escaped the earth’s field it will have no kinetic energy left, and also no potential energy since it’s out of the earth’s field, so its total energy will be zero. Since the particle’s total energy must be constant, it must also have zero total energy at the surface of the earth. This means that the kinetic energy it has at the surface of the earth must exactly cancel the gravitational potential energy it has there: 1 mMR mve2 − G =0 2 RR so v= s 2GMR RR = 11.2 km/s · = 2 · (6.67 · 1011 m3 kg−3 s−2 ) · (5.98 · 1024 kg) 6.38 · 106 m 1m = 6.95 mi/s. 1.61 km 1/2 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 3 Problem 1.3 Rockets are propelled by the momentum reaction of the exhaust gases expelled from the tail. Since these gases arise from the reaction of the fuels carried in the rocket the mass of the rocket is not constant, but decreases as the fuel is expended. Show that the equation of motion for a rocket projected vertically upward in a uniform gravitational field, neglecting atmospheric resistance, is m dv dm = −v 0 − mg, dt dt where m is the mass of the rocket and v 0 is the velocity of the escaping gases relative to the rocket. Integrate this equation to obtain v as a function of m, assuming a constant time rate of loss of mass. Show, for a rocket starting initially from rest, with v 0 equal to 6800 ft/sec and a mass loss per second equal to 1/60th of the initial mass, that in order to reach the escape velocity the ratio of the weight of the fuel to the weight of the empty rocket must be almost 300! Suppose that, at time t, the rocket has mass m(t) and velocity v(t). The total external force on the rocket is then F = gm(t), with g = 32.1 ft/s2 , pointed downwards, so that the total change in momentum between t and t + dt is F dt = −gm(t)dt. (1) At time t, the rocket has momentum p(t) = m(t)v(t). (2) On the other hand, during the time interval dt the rocket releases a mass ∆m of gas at a velocity v 0 with respect to the rocket. In so doing, the rocket’s velocity increases by an amount dv. The total momentum at time t + dt is the sum of the momenta of the rocket and gas: p(t + dt) = pr + pg = [m(t) − ∆m][v(t) + dv] + ∆m[v(t) + v 0 ] (3) Subtracting (2) from (3) and equating the difference with (1), we have (to first order in differential quantities) −gm(t)dt = m(t)dv + v 0 ∆m or dv v 0 ∆m = −g − dt m(t) dt Homer Reid’s Solutions to Goldstein Problems: Chapter 1 4 which we may write as dv v0 = −g − γ dt m(t) (4) where ∆m 1 = m0 s−1 . dt 60 γ= This is a differential equation for the function v(t) giving the velocity of the rocket as a function of time. We would now like to recast this as a differential equation for the function v(m) giving the rocket’s velocity as a function of its mass. To do this, we first observe that since the rocket is releasing the mass ∆m every dt seconds, the time derivative of the rocket’s mass is dm ∆m =− = −γ. dt dt We then have dv dv dm dv = = −γ . dt dm dt dm Substituting into (4), we obtain −γ dv v0 = −g − γ dm m or dv = dm g dm + v 0 . γ m Integrating, with the condition that v(m0 ) = 0, v(m) = g (m − m0 ) + v 0 ln γ m m0 . Now, γ=(1/60)m0 s−1 , while v 0 =-6800 ft/s. Then m m 0 v(m) = 1930 ft/s · − 1 + 6800 ft/s · ln m0 m For m0 m we can neglect the first term in the parentheses of the first term, giving m 0 . v(m) = −1930 ft/s + 6800 ft/s · ln m The escape velocity is v = 6.95 mi/s = 36.7 · 103 ft/s. Plugging this into the equation above and working backwards, we find that escape velocity is achieved when m0 /m=293. Thanks to Brian Hart for pointing out an inconsistency in my original choice of notation for this problem. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 5 Problem 1.4 Show that for a single particle with constant mass the equation of motion implies the following differential equation for the kinetic energy: dT = F · v, dt while if the mass varies with time the corresponding equation is d(mT ) = F · p. dt We have F = ṗ (5) If m is constant, F = mv̇ Dotting v into both sides, F · v = mv · v̇ = = 1 d 2 m |v| 2 dt dT dt On the other hand, if m is not constant, instead of v we dot p into (5): F · p = p · ṗ d(mv) dt dm dv = mv · v +m dt dt 1 d 1 d = v 2 m2 + m2 (v 2 ) 2 dt 2 dt 1 d d(mT ) = (m2 v 2 ) = . 2 dt dt = mv · (6) 6 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 Problem 1.5 Prove that the magnitude R of the position vector for the center of mass from an arbitrary origin is given by the equation M 2 R2 = M X mi ri2 − i We have Rx = so 1X 2 mi mj rij . 2 ij 1 X mi xi M i X X 1 Rx2 = 2 mi mj xi xj m2i x2i + M i i6=j and similarly X X 1 Ry2 = 2 mi mj y i y j m2i yi2 + M i i6=j X X 1 m2i zi2 + mi mj z i z j . Rz2 = 2 M i i6=j Adding, X X 1 R2 = 2 m2i ri2 + mi mj (ri · rj ) . M i (7) i6=j On the other hand, 2 rij = ri2 + rj2 − 2ri · rj 2 and, in particular, rii = 0, so X X 2 = mi mj rij [mi mj ri2 + mi mj rj2 − 2mi mj (ri · rj )] i,j i6=j =2 X mi mj ri2 − 2 X mi mj (ri · rj ). (8) i6=j i6=j Next, M X i mi ri2 = X j mj X i mi ri2 ! = X i m2i ri2 + X i6=j mi mj ri2 . (9) Homer Reid’s Solutions to Goldstein Problems: Chapter 1 7 r0 , φ0 r, φ (x, y) θ Figure 1: My conception of the situation of Problem 1.8 Subtracting half of (8) from (9), we have M X mi ri2 − X X 1X 2 ijmi mj rij = m2i ri2 + mi mj (ri · rj ) 2 i i6=j and comparing this with (7) we see that we are done. Problem 1.8 Two wheels of radius a are mounted on the ends of a common axle of length b such that the wheels rotate independently. The whole combination rolls without slipping on a plane. Show that there are two nonholonomic equations of constraint, cos θ dx + sin θ dy = 0 sin θ dx − cos θ dy = a(dφ + dφ0 ) (where θ, φ, and φ0 have meanings similar to the problem of a single vertical disc, and (x, y) are the coordinates of a point on the axle midway between the two wheels) and one holonomic equation of constraint, a θ = C − (φ − φ0 ) b where C is a constant. My conception of the situation is illustrated in Figure 1. θ is the angle between the x axis and the axis of the two wheels. φ and φ0 are the rotation angles of the two wheels, and r and r0 are the locations of their centers. The center of the wheel axis is the point just between r and r0 : (x, y) = 1 (rx + rx0 , ry + ry0 ). 2 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 8 If the φ wheel rotates through an angle dφ, the vector displacement of its center will have magnitude adφ and direction determined by θ. For example, if θ = 0 then the wheel axis is parallel to the x axis, in which case rolling the φ wheel clockwise will cause it to move in the negative y direction. In general, referring to the Figure, we have dr = a dφ[sin θ î − cos θ ĵ] 0 0 dr = a dφ [sin θ î − cos θ ĵ] (10) (11) Adding these componentwise we have1 a [dφ + dφ0 ] sin θ 2 a dy = − [dφ + dφ0 ] cos θ 2 dx = Multiplying these by sin θ or − cos θ and adding or subtracting, we obtain sin θ dx − cos θ dy = a[dφ + dφ0 ] cos θ dx + sin θ dy = 0. Next, consider the vector r12 = r − r0 connecting the centers of the two wheels. The definition of θ is such that its tangent must just be the ratio of the y and x components of this vector: y12 x12 1 y12 2 dy12 . → sec θ dθ = − 2 dx12 + x12 x12 tan θ = Subtracting (11) from (10), 1 y12 cos θ sec2 θdθ = a[dφ − dφ0 ] − 2 sin θ − x12 x12 Again substituting for y12 /x12 in the first term in parentheses, sec2 θdθ = −a[dφ − dφ0 ] 1 (tan θ sin θ + cos θ) x12 or 1 (sin2 θ cos θ + cos3 θ) x12 1 = −a[dφ − dφ0 ] cos θ. x12 dθ = −a[dφ − dφ0 ] (12) 1 Thanks to Javier Garcia for pointing out a factor-of-two error in the original version of these equations. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 9 However, considering the definition of θ, we clearly have x12 x12 = cos θ = 2 2 1/2 b (x12 + y12 ) because the magnitude of the distance between r1 and r2 is constrained to be b by the rigid axis. Then (12) becomes a dθ = − [dφ − dφ0 ] b with immediate solution a θ = C − [φ − φ0 ]. b with C a constant of integration. Problem 1.9 A particle moves in the x − y plane under the constraint that its velocity vector is always directed towards a point on the x axis whose abscissa is some given function of time f (t). Show that for f (t) differentiable, but otherwise arbitrary, the constraint is nonholonomic. The particle’s position is (x(t), y(t)), while the position of the moving point is (f (t), 0). Then the vector d from the particle to the point has components dx = x(t) − f (t) dy = y(t). (13) The particle’s velocity v has components dx dy vy = (14) dt dt and for the vectors in (13) and (?? to be in the same direction, we require vx = vy dy = vx dx or dy y(t) dy/dt = = dx/dt dx x(t) − f (t) so dy dx = y x − f (t) For example, if f (t) = αt, then we may integrate to find (15) ln y(t) = ln[x(t) − α(t)] + C or y(t) = C · [x(t) − αt] which is a holonomic constraint. But for general f (t) the right side of (15) is not integrable, so the constraint is nonholonomic. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 10 φ l θ a Figure 2: My conception of the situation of Problem 1.10 Problem 1.10 Two points of mass m are joined by a rigid weightless rod of length l, the center of which is constrained to move on a circle of radius a. Set up the kinetic energy in generalized coordinates. My conception of this one is shown in Figure 2. θ is the angle representing how far around the circle the center of the rod has moved. φ is the angle the rod makes with the x axis. The position of the center of the rod is (x, y) = (a cos θ, a sin θ). The positions of the masses relative to the center of the rod are (xrel , yrel ) = ±(1/2)(l cos φ, l sin φ). Then the absolute positions of the masses are (x, y) = (a cos θ ± l l cos φ, a sin θ ± sin φ) 2 2 and their velocities are (vx , vy ) = (−a sin θ θ̇ ∓ l l sin φ φ̇, a cos θ θ̇ ± cos φ φ̇). 2 2 The magnitudes of these are l2 2 φ̇ ± al θ̇ φ̇(sin θ sin φ + cos θ cos φ) 4 l2 = a2 θ̇2 + φ̇2 ± al θ̇ φ̇ cos(θ − φ) 4 |v| = a2 θ̇2 + When we add the kinetic energies of the two masses, the third term cancels, and we have l2 1X mv 2 = m(a2 θ̇2 + φ̇2 ). T = 2 4 11 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 Problem 1.13 A particle moves in a plane under the influence of a force, acting toward a center of force, whose magnitude is 1 ṙ2 − 2r̈r F = 2 1− , r c2 where r is the distance of the particle to the center of force. Find the generalized potential that will result in such a force, and from that the Lagrangian for the motion in a plane. (The expression for F represents the force between two charges in Weber’s electrodynamics). If we take 1 U (r) = r then v2 1 (ṙ)2 1+ 2 = + 2 c r c r ∂U 1 ṙ2 =− 2 − 2 2 ∂r r c r and 2r̈ 2(ṙ)2 − 2 2 2 c r c r 2rr̈ − (ṙ)2 d ∂U 1 ∂U + = 2 1+ Qr = − ∂r dt ∂ ṙ r c2 d d ∂U = dt ∂ ṙ dt so 2ṙ c2 r = The Lagrangian for motion in a plane is L=T −V = 1 2 1 2 2 1 mṙ + mṙ θ̇ − 2 2 2 r 1+ 2rr̈ − (ṙ)2 c2 . Problem 1.14 If L is a Lagrangian for a system of n degrees of freedom satisfying Lagrange’s equations, show by direct substitution that L0 = L + dF (q1 , . . . , qn , t) dt also satisfies Lagrange’s equations, where F is any arbitrary, but differentiable, function of its arguments. We have ∂L0 ∂L ∂ dF = + ∂qi ∂qi ∂qi dt (16) Homer Reid’s Solutions to Goldstein Problems: Chapter 1 12 and ∂L ∂ dF ∂L0 = + . ∂ q̇i ∂ q̇i ∂ q̇i dt For the function F we may write (17) X ∂F ∂F dF = q̇i + dt ∂qi ∂t i and from this we may read off ∂F ∂ dF = . ∂ q̇i dt ∂qi Then taking the time derivative of (17) gives d ∂L d ∂F d ∂L0 = + dt ∂ q̇i dt ∂ q̇i dt ∂qi so we have ∂L0 d ∂L0 ∂L d ∂L ∂ dF d ∂F − = − + − . ∂qi dt ∂ q̇i ∂qi dt ∂ q̇i ∂qi dt dt ∂qi The first two terms on the RHS cancel because L satisfies the Euler-Lagrange equations, while the second two terms cancel because F is differentiable. Hence L0 satisfies the Euler-Lagrange equations. Problem 1.16 A Lagrangian for a particular physical system can be written as L0 = m K (aẋ2 + 2bẋẏ + cẏ 2 ) − (ax2 + 2bxy + cy 2 ), 2 2 where a, b, and c are arbitrary constants but subject to the condition that b2 − ac 6= 0. What are the equations of motion? Examine particularly the two cases a = 0 = c and b = 0, c = −a. What is the physical system described by the above Lagrangian? Show that the usual Lagrangian for this system as defined by Eq. (1-56) is related to L0 by a point transformation (cf. Exercise 15 above). What is the significance of the condition on the value of b2 − ac? Clearly we have ∂L = −Kax − Kby ∂x ∂L = maẋ + mbẏ ∂ ẋ so the Euler-Lagrange equation for x is ∂L d ∂L = ∂x dt ∂ ẋ → m(aẍ + bÿ) = −K(ax + by). Homer Reid’s Solutions to Goldstein Problems: Chapter 1 13 Similarly, for y we obtain m(bÿ + cÿ) = −K(bx + cy). These are the equations of motion for a particle of mass m undergoing simple harmonic motion in two dimensions, as if bound by two springs of spring constant K. Normally we would express the Lagrangian in unravelled form, by transforming to new coordinates u1 and u2 with u1 = ax + by u2 = bx + cy. The condition b2 − ac 6= 0 is the condition that the coordinate transformation not be degenerate, i.e. that there are actually two distinct dimensions in which the particle experiences a restoring force. If b2 = ac then we have just a onedimensional problem. Problem 1.17 Obtain the Lagrangian equations of motion for a spherical pendulum, i.e. a mass point suspended by a rigid weightless rod. Let m and L be the mass of the particle and the length of the rod. Since the particle is constrained to move on the surface of a sphere of radius L, we may parameterize its position by the angles θ and ϕ, in terms of which the particle’s position and velocity are x = L (sin θ cos ϕi + sin θ sin ϕj + cos θk) v = L (cos θ cos ϕθ̇ − sin θ sin ϕϕ̇)i + (cos θ sin ϕθ̇ + sin θ cos ϕϕ̇)j − (sin θθ̇k) . so the kinetic energy is T = 1 mL2 2 mL2 mv2 = θ̇ + sin2 θϕ̇2 . 2 2 2 On the other hand, the gravitational potential energy depends only on θ : V = −mgL cos θ where we take the potential at the height of the fulcrum as the zero of potential. Then the Lagrangian is L=T −V = 1 1 mL2 θ̇2 + mL2 sin2 θϕ̇2 + mgL cos θ 2 2 and the equations of motion are ϕ̈ = 0 θ̈ = − g L − ϕ̇2 cos θ sin θ. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 14 If there is no motion in the azimuthal direction, ϕ̇ = 0 and the systempis the elementary one-dimensional mechanical pendulum with frequency ω0 = g/L. But any finite velocity of azimuthal spinning gives rise to an additional effect which we may think of as mitigating the downward force of gravity, yielding an effective gravitational acceleration g 0 = g − Lϕ̇2 cos θ. The mitigating effect is largest near the trough of the pendulum, vanishes as the particle passes through the vertical height of the fulcrum, and becomes an enhancing effect in the upper hemisphere. For small oscillations p about the trough, cos θ ≈ 1 and the pendulum frequency is reduced to ω = ω02 − ϕ̇2 . Thanks to Tomasz Szymanski for pointing out an error in an earlier version of this solution. Problem 1.18 A particle of mass m moves in one dimension such that it has the Lagrangian m2 ẋ4 + mẋ2 V (x) − V 2 (x), 12 L= where V is some differentiable function of x. Find the equation of motion for x(t) and describe the physical nature of the system on the basis of this equation. We have dV ∂L dV = mẋ2 − 2V (x) ∂x dx dx ∂L m2 ẋ3 = + 2mẋV (x) ∂ ẋ 3 d ∂L d = m2 (ẋ)2 ẍ + 2mẍV (x) + 2mẋ V (x) dt ∂ ẋ dt In the last equation we can use d dV V (x) = ẋ . dt dx Then the Euler-Lagrange equation is d ∂L ∂L − =0 dt ∂ ẋ ∂x or → m2 (ẋ)2 ẍ + 2mẍV (x) + mẋ2 mẍ + dV dx mẋ2 + 2V (x) = 0. dV dV + 2V (x) dx dx Homer Reid’s Solutions to Goldstein Problems: Chapter 1 15 If we identify F = −dV /dx and T = mẋ2 /2, we may write this as (F − mẍ)(T + V ) = 0 So, this is saying that, at all times, either the difference between F and ma is zero, or the sum of kinetic and potential energy is zero. Problem 1.19 Two mass points of mass m1 and m2 are connected by a string passing through a hole in a smooth table so that m1 rests on the table and m2 hangs suspended. Assuming m2 moves only in a vertical line, what are the generalized coordinates for the system? Write down the Lagrange equations for the system and, if possible, discuss the physical significance any of them might have. Reduce the problem to a single second-order differential equation and obtain a first integral of the equation. What is its physical significance? (Consider the motion only so long as neither m1 nor m2 passes through the hole). Let d be the height of m2 above its lowest possible position, so that d = 0 when the string is fully extended beneath the table and m1 is just about to fall through the hole. Also, let θ be the angular coordinate of m1 on the table. Then the kinetic energy of m2 is just m2 d˙2 /2, while the kinetic energy of m1 is m1 d˙2 /2 + m1 d2 θ̇2 /2, and the potential energy of the system is just the gravitational potential energy of m2 , U = m2 gd. Then the Lagrangian is L= 1 1 (m1 + m2 )d˙2 + m1 d2 θ̇2 − m2 gd 2 2 and the Euler-Lagrange equations are d (m1 d2 θ̇) = 0 dt (m1 + m2 )d¨ = −m2 g + m1 dθ̇2 From the first equation we can identify a first integral, m1 d2 θ̇ = l where l is a constant. With this we can substitute for θ̇ in the second equation: (m1 + m2 )d¨ = −m2 g + l2 m1 d3 Because the sign of the two terms on the RHS is different, this is saying that, if l is big enough (if m1 is spinning fast enough), the centrifugal force of m1 can balance the downward pull of m2 , and the system can be in equilibrium. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 16 Problem 1.20 Obtain the Lagrangian and equations of motion for the double pendulum illustrated in Fig. 1-4, where the lengths of the pendula are l1 and l2 with corresponding masses m1 and m2 . Taking the origin at the fulcrum of the first pendulum, we can write down the coordinates of the first mass point: x1 = l1 sin θ1 y1 = −l1 cos θ1 The coordinates of the second mass point are defined relative to the coordinates of the first mass point by exactly analogous expressions, so relative to the coordinate origin we have x2 = x1 + l2 sin θ2 y2 = y1 − l2 cos θ2 Differentiating and doing a little algebra we find ẋ21 + ẏ12 = l12 θ̇12 ẋ22 + ẏ22 = l12 θ̇12 + l22 θ̇22 − 2l1 l2 θ̇1 θ̇2 cos(θ1 − θ2 ) The Lagrangian is L= 1 1 (m1 +m2 )l12 θ̇12 + m2 l22 θ̇22 −m2 l1 l2 θ̇1 θ̇2 cos(θ1 −θ2 )+(m1 +m2 )gl2 cos θ1 +m2 gl2 cos θ2 2 2 with equations of motion and i d h (m1 + m2 )l12 θ̇1 − m2 l1 l2 θ̇2 cos(θ1 − θ2 ) = −(m1 + m2 )gl2 sin θ1 dt i d h l2 θ̇2 − l1 θ̇1 cos(θ1 − θ2 ) = −g sin θ2 . dt If θ̇1 = 0, so that the fulcrum for the second pendulum is stationary, then the second of these equations reduces to the equation we derived in Problem 1.17. Homer Reid’s Solutions to Goldstein Problems: Chapter 1 17 Problem 1.21 The electromagnetic field is invariant under a gauge transformation of the scalar and vector potential given by A → A + ∇Ψ(r, t), 1 ∂Ψ Φ→ Φ− , c ∂t where Ψ is arbitrary (but differentiable). What effect does this gauge transformation have on the Lagrangian of a particle moving in the electromagnetic field? Is the motion affected? The Lagrangian for a particle in an electromagnetic field is q L = T − qΦ(x(t)) + A(x(t)) · v(t) c If we make the suggested gauge transformation, this becomes " # 1 ∂Ψ q → T − q Φ(x(t)) − + [A(x(t)) · v(t) + v · ∇Ψ(x(t))] c ∂t x=x(t) c q q ∂Ψ = T − qΦ(x(t)) + A(x(t)) · v(t) + + v · ∇Ψ(x(t)) c c ∂t q q d = T − qΦ(x(t)) + A(x(t)) · v(t) + Ψ(x(t)) c c dt q d Ψ(x(t)). =L+ c dt So the transformed Lagrangian equals the original Lagrangian plus a total time derivative. But we proved in Problem 1.15 that adding the total time derivative of any function to the Lagrangian does not affect the equations of motion, so the motion of the particle is unaffected by the gauge transformation. Problem 1.22 Obtain the equation of motion for a particle falling vertically under the influence of gravity when frictional forces obtainable from a dissipation function 21 kv 2 are present. Integrate the equation to obtain the velocity as a function of time and show that the maximum possible velocity for fall from rest is v = mg/k. The Lagrangian for the particle is L= 1 mż 2 − mgz 2 Homer Reid’s Solutions to Goldstein Problems: Chapter 1 18 and the dissipation function is k ż 2 /2, so the equation of motion is d ∂L ∂L ∂F + → mz̈ = mg − k ż. − dt ∂ ż ∂z ∂ ż This says that the acceleration goes to zero when mg = k ż, or ż = mg/k, so the velocity can never rise above this terminal value (unless the initial value of the velocity is greater than the terminal velocity, in which case the particle will slow down to the terminal velocity and then stay there).