Vector Addition Displacement Adding Vectors by Components
advertisement

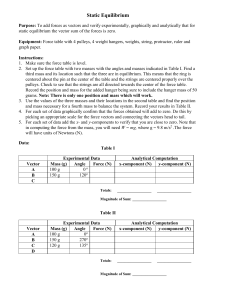
Adding Vectors by Components I’ll illustrate by using this sample problem. Vector Addition Displacement G A is a vector 66.0 G units long at a 28° angle with respect to the positive x axis. B is a vector 40.0 units longG atGa 56° angle with respect to the negative x axis. Calculate A + B and give the resultant in terms of its (a) components and (b) magnitude and angle with the x axis. There are standard problem-solving rules I will recommend* you follow throughout this course, so let’s start using them now (they will be introduced “officially” later in a slightly different format). “Do not worry about your difficulties in mathematics, I assure you that mine are greater.”—A. Einstein The zeroeth step (i.e., not part of the “official” regimen, but you should do it anyway) is to understand, think about, or make sense out of the problem. In this example, the words on the previous slide don’t make much sense to me, so understanding requires drawing a diagram. Drawing a diagram is also the “official” first step. *i.e., require I’ll work this example on the blackboard in class. My lecture notes contain a detailed step-by-step solution that I recommend you study outside of class. Step 1: draw a complete, fully-labeled diagram for the problem. Step 2: choose, draw, and label your axes, with arrow(s) indicating the positive direction(s). Step 3: lightly draw in components of all vectors that are not parallel to your chosen axes. Step 4: select an OSE (official starting equation). In class, I will jump to a digression on components. 1 Step 1: draw a complete, fully-labeled diagram for the problem. y A B θ Step 3: lightly draw in components of all vectors that are not parallel to your chosen axes. y Bx A θ x How do you know the diagram is complete and fully-labeled? Anything you use in your calculations must appear in or be justified by the diagram. You will often have to add items to your diagram as you proceed. A θ Ax Ay In most problems, you will get to choose your axes. G G The resultant is A +B, so let’s draw that in. y When doing vector problems in chapter 3, label the components appropriately (Ax, By etc.) In other problems, don’t—it just adds too much confusion to the diagram). For computer-generated figures, I will often used dashed lines for components. Don’t waste your time on exams making dashed lines. It’s OK to offset components slightly from axes or other parts of the diagram. A = 66.0 θ = 28° B = 40.0 φ = 56° C By φ x x Already done: the axes were an integral part of the problem statement. A = 66.0 θ = 28° B = 40.0 φ = 56° B A = 66.0 θ = 28° B = 40.0 φ = 56° φ Vectors should be drawn using darker lines than the rest of the sketch. By φ y A = 66.0 θ = 28° B = 40.0 φ = 56° B φ Step 2: choose, draw, and label your axes, with arrow(s) indicating the positive direction(s). B Bx A θ Ax Ay x I decided to use the parallelogram method to indicate the resultant. G If you don’t show the parallelogram, C may look “wrong” to your eyes. 2 Step 4: select an OSE (official starting equation). Remember, DO NOT do this: y C By φ B A θ Bx y A = 66.0 θ = 28° B = 40.0 φ = 56° Ay C By φ x Ax No! No! No! A = 66.0 θ = 28° B = 40.0 φ = 56° B A θ Ay x Bx Ax G G G OSE: if C = A +B then Cx =Ax +Bx, Cy=Ay+By,Cz =Az +Bz. All further steps must follow logically from this OSE and the diagram. No! Do not substitute any numbers until the very end! On page 49 of your text, Giancoli clearly says that components of a vector are themselves vectors. Digression: vectors and components. y A Ay Ax G Ax and Ay are components of the vector A . Ax and Ay are a different kind of beast. x Physicists often use the words “x-component” to mean “the vector which is the x-component of the vector in question” or to mean “the magnitude of the x-component of the vector in question” and leave it to you to figure it out from the context. Bad! Physicists! In Physics 23, a component is a scalar. The magnitude of the scalar tells how big the component is. The sign tells which direction the component points. Watch out for them! 3 If you happen to be working on homework in the Physics Learning Center… …and Dr. Bieniek (professor in charge of Physics 23) hears you say that a component is a vector… …he will most likely start talking in a loud voice about how stupid your instructor is for not properly teaching you about components. In this course, the symbol Ax is understood to be a scalar which “contains” information about both the magnitude andG direction along the x-axis of the x-component of the vector A . Anybody confused yet? We wouldn’t want that, now, would we? If not, you’ve been sleeping! I want this class to make you hear little voices in your head. The symbol Ax talks to you. It asks two questions… Remember, Ax says “you need to tell how big I am and which way I point.” Ax also says “I am a scalar. Never set me equal to a vector.” ≠ How big am I? G G G If C = A +B then Cx =Ax +Bx, Cy=Ay+By,Cz =Az +Bz. vectors scalars Which way do I point? Notice how vectors and scalars are never set equal in our OSE. 4 Step 5: using your selected OSE, replace generic quantities with specifics and solve algebraically. Continuing on the blackboard... Step 5: using your selected OSE, replace generic quantities with specifics and solve algebraically… Must do each component separately… note trig functions. y This is going to take a lot of slides, because I want to keep the diagram “handy.” …then replace generic component quantities with the information given in the problem. A = 66.0 θ = 28° B = 40.0 φ = 56° C By φ B A θ Bx Ay x Ax Make sure to solve all parts of the problem! G G G OSE: if C = A +B then Cx =Ax +Bx, Cy=Ay+By,Cz =Az +Bz. Now jump here. x-component: This is still an OSE. Do not change it! Do not insert a – sign here! Cx = Ax + Bx We’ll have to do each component separately. y Trig that you’ll be using for the rest of this course: θ adjacent hyp ot ene C u se By φ opposite hypoteneuse opposite = ( hypoteneuse )( sin θ ) cos θ = adjacent hypoteneuse adjacent = ( hypoteneuse )( cos θ ) tan θ = opposite adjacent opposite = ( adjacent )( tan θ ) B A θ Bx opposite sin θ = A = 66.0 θ = 28° B = 40.0 φ = 56° x-component: Ay Ax Cx = Ax + Bx x (copied from a previous slide) Replace generic component quantities with the information given in the problem. Cx = + +(+A cos θ) + (-B cos φ) You decide the signs to put in. Use the “finger trick” that I’ll show you to prevent embarassing sign errors. 5 y A = 66.0 θ = 28° B = 40.0 φ = 56° C By φ B A θ Bx y-component: The algebra is done, so we can plug in numbers: Ay Ax G G However, the problem said “calculate A +B and give the resultant in terms of its (a) components and (b) magnitude and angle with the x axis,” so we are not done. Cx = A cos θ - B cos φ Cy = A sin θ + B sin φ x Cx = 66.0 cos 28.0° - 40.0 cos 56° Cy = 66.0 sin 28.0° + 40.0 sin 56° Cy = Ay + By Cy = (+A sin θ) + (+B sin φ) If this were an algebra-only problem, you would be “done:” how to make mistakes: skip steps Cx = 35.9 Cy = 64.1 Cx = A cos θ - B cos φ Cy = A sin θ + B sin φ keep at least one extra digit during intermediate calculations and round at the end Cx = 58.27 - 22.37 Cy = 30.99 + 33.16 dimensionless, because the problem didn’t give any units for the original vectors y Cx = 35.9 Cy = 64.1 G The Gabove equations completely specify C . If I just asked you for C but did not specify what form, you would be done. Before I finish, let’s think a bit. Is the above answer reasonable? Cx = 35.9 Cy = 64.1 Cy C By φ B Bx A = 66.0 θ = 28° B = 40.0 φ = 56° A Ay θ Cx A x x My figure suggests that Cy is bigger than Cx, and both point in the positive direction. The math agrees. G If B were longer, say 70 or 80, then it might not be clear from the drawing whether the Cx points along the +x or -x direction. In such a case, do your best with the diagram, and re-draw it only if it is seriously wrong. 6 y Cx = 35.9 Cy = 64.1 y Cx = 35.9 Cy = 64.1 Cy C Cy C α α x Cx x Cx G Calculate the magnitude and direction of the resultant: C = (Cx2 + Cy2)½ C= (35.902 + 64.152)½ C = (35.902 + 64.152)½ remember—put boxes around your answers Use the “finger trick” again to determine the angle that C makes with the x-axis. This is listed as an OSE, but I will not require that you designate algebra and trig “facts” as OSE’s on your exams unless I make it clear that you need to do so. tan α = Cy/Cx α= tan-1 sine or cosine would work too (Cy/Cx) α = tan-1 (+64.15/+35.90) C = 73.5 α = 60.8 ° Unit Vectors “Dang, that was a lot of work for just one little piece of one simple problem!” No, it only seemed that way because I did it in detail. Example 3-2 on page 52 of your text is done equivalently to the above example. Our solutions typically involve more steps than Giancoli’s because leaving out steps is dangerous to your grade. Most physicsts use unit vectors, and you may encounter them in your visits to the PLC. Unit vectors are a shortcut for expressing vectors. The unit vector î (that’s a “hat” above the i) is a vector of length 1 in the +x direction. The unit vector ĵ (that’s a “hat” above the j) is a vector of length 1 in the +y direction. In solving our example above, we could have written G G G OSE: C = A + B . G C = (Ax + Bx) î + (Ay + By) ĵ … G C = 35.9 î + 64.1 ĵ The line above completely specifies the resultant. 7 Remember! Reminder… Vectors and scalars are different. A vector can never equal a scalar. Some of you will try to make a vector equal a scalar, either… on paper on the board in front of the class or on a test. One word: These stupid animations are intended to help you remember the point! Components, one more time… G Q = Qxî + Qyĵ. Qxî G The x-component of Q . G The vector x-component of Q. (But physicists often leave out the word “vector.”) G We will use this convention: Qx is the x-component of Q. Qx has a magnitude |Qx| and is pointed along either the +x or -x direction. The sign “buried” in the symbol Qx tells the direction. The scalar Qx includes both the magnitude of Qx and the sign. If Qx and Qy are the scalarsG that represent the x- and yGG +Qyyĵĵ.. You You may may components of the vector Q ,, then then Q =Qxxîî +Q Q =Q know, perhaps from a drawing or information given, that the G y-component of QG points in the -y direction. You may be tempted to write Q =Qxî -Qyĵ. DON’T. If you do, in a later step you will insert an extra - sign. Handout: Dr. Bieniek’s Homework and Boardwork Operating Procedures handout. Handout: Dr. Bieniek’s Litany for Kinematics Problems handout. I highly recommend you look at Dr. Bieniek’s Physics 23 lecture notes on this subject. They will be available on the web at http://www.umr.edu/~phys23 under the “lectures and announcements” link. They will probably be under lec-02 (they are not there yet because he hasn’t given that lecture yet). In fact, I highly recommend you spend some time looking at all of Dr. Bieniek’s lecture notes as they become available. 8 Chapter 2 Describing Motion Kinematics in One Dimension Now that we are experts in vectors, we backtrack to Chapter 2. “Kinematics” is the study of how objects move, without asking about the causes of the motion. Chapter 2 deals with the kinematics of motion in one dimension. 2.1 Reference Frames and Displacement Virtually all problems require a set of coordinate axes which provide a reference frame for position and motion. In this class, unless you are specifically told to use a particular set of axes, you always have the freedom of choice of coordinate axes.* y y x Like these axes? Use them. x Like these axes better? Use them. *But you really want to keep x and y perpendicular. To study motion, we need to measure position and how it changes. Like position, displacement is a vector quantity, defined as the change of position of an object. I suppose I had better start at the beginning and define position: If an object moves in one dimension from initial position x0 to final position x1, then the displacement is Dx=x1-x0. OSE : G r = x ˆi + y ˆj . The î and ĵ are just shortcuts for writing both components in one equation. Yes, I know that’s a vector equation and chapter 2 is supposed to be one dimensional. But this OSE is “better” because it works for both one and two dimensions. (How could we extend it to three dimensions?) It is conventional in one dimensional problems to call the axis along which the object moves the x-axis.* Then the position is just the value of x (including sign). *Remember, if I don’t require otherwise, you can call it anything you want. We frequently use the symbol ∆ for changes, so let’s use ∆x for displacement: OSE : G G G ∆r = rf - ri . According to the Official Rules, “component versions of vector Official Starting Equations are also OSE,” so you can begin any problem with this, if you wish: OSE : ∆x = x f - xi . That last equation is “contained in” the OSE that appears on the OSE sheet. 9 “Wait a minute—on your last slide, you said displacement is a vector quantity, but I don’t see vectors anywhere in Chapter 2.” Good point. A vector has both a magnitude and a direction. A displacement in one dimension has a magnitude and a direction (towards + or towards -). A displacement in one dimension must be a vector! However, because the sign of the displacement specifies the direction, we don’t need to carry the vector baggage along with us in Chapter 2 (as long as we keep signs straight). Motion involves time, so that x = x(t). We use subscripts to denote corresponding positions and times: x0 is the position at time t0, xf is the position at time tf, etc. Caution: t0 is often chosen to be zero, but it doesn’t have to be! x0 is the position at time t0, and is not necessarily zero! In fact, you get to set problems up so that t0 and x0 have whatever values you want them to have. By convention 1-dimensional kinematics is usually taught as if there were no vectors involved. Sample calculation: I start at the 100-m finish line of a track and walk halfway towards the starting line. What is my displacement? Use the Litany for Kinematics Problems. 5. You MUST begin with an appropriate OSE. Subsequent steps must follow logically from this OSE and reference the diagram. I’ll work this example on the blackboard in class. My lecture notes contain a detailed step-by-step solution that I recommend you study outside of class. 6. Replace the generic component quantities with information given in the problem. 1. Draw a basic representative sketch of the physical situation. 7. Solve for the desired quantity algebraically—already done above in this simple example. Don’t do steps in your head! 2. Draw and label vectors for the relevant dynamical quantities that you are given in both initial and final states. 3. Draw an axis with an arrow at one end indicating its positive direction. Indicate the origin (zero position) of the axis. 4. Indicate and label with appropriate subscripts the initial and final positions along the axis. (Recommend show units.) 8. Yes, now you can plug in numbers (if you have them). Put a box around the final answer. The remaining slides show a detailed solution of this simple problem. They are intended for your study outside of class. 10 Sample calculation: I start at the 100-m finish line of a track and walk halfway towards the starting line. What is my displacement? Use the Litany for Kinematics Problems. 2. Draw and label vectors for the relevant dynamical quantities that you are given in both initial and final states. 1. Draw a basic representative sketch of the physical situation. D * 100 50 0 100 50 0 *On exams or quizzes, use stick figures, blobs, filled-in circles, squares, etc. to represent objects. Don’t waste your exam time creating art. 3. Draw an axis with an arrow at one end indicating its positive direction. Indicate the origin (zero position) of the axis. 4. Indicate and label with appropriate subscripts the initial and final positions along the axis. (Recommend show units.) D D x 100 50 0 x 0 100 x1 = 100 m 0 50 x2 = 50 m 0 11 5. You MUST begin with an appropriate OSE. Subsequent steps must follow logically from this OSE and reference the diagram. We’ll use the component version of the OSE. “I don’t see an OSE for displacement!” Sure you do. OSE : OSE : G G G ∆r = rf - ri . D D x 100 x1 = 100 m 50 x2 = 50 m 0 x 0 100 x1 = 100 m 6. Replace the generic component quantities with information given in the problem. 0 50 x2 = 50 m 0 Lets use the fact that D points in the negative x direction. Use the touch technique that I’ll show you in class. You have a choice how to proceed from here. From the diagram, you know which way D points. You can use that information now. If you were only guessing at the direction of D, you should take a different approach. ∆x = x f - xi + ( -D ) = x2 - x1 D No! No! No! Don’t plug in numbers yet! D x 100 x1 = 100 m ∆x = x f - xi . 50 x2 = 50 m 0 x 0 100 x1 = 100 m 0 50 x2 = 50 m 0 12 7. Solve for the desired quantity algebraically—already done above in this simple example. Don’t do steps in your head! -D = x2 - x1 Already done. That was easy! D 0 x 100 x1 = 100 m 50 x2 = 50 m 0 8. Yes, now you can plug in numbers (if you have them). Put a box around the final answer. -D = x2 - x1 -D = 50 m - 100 m D = + 50 m D The + sign is correct. D is a magnitude, so it must be positive. The diagram gives the direction, so D is completely specified.* The following slides show how to proceed if you don’t know for sure which way D points. We’ll start with step 6, and leave Dx alone. Doing that is equivalent to saying “I don’t know for sure which way D points, so I’ll let the mathematics tell me.” 0 x 100 x1 = 100 m *The 50 x2 = 50 m 0 answer in the box, plus the diagram, are the solution to the problem. 13 6. Replace the generic component quantities with information given in the problem. 7. Solve for the desired quantity algebraically—already done above in this simple example. Don’t do steps in your head! ∆x = x f - xi D x = x2 - x1 D x = x2 - x1 No! No! No! Don’t plug in numbers yet! D D x 100 x1 = 100 m Already done. That was easy! 50 x2 = 50 m 0 x 0 100 x1 = 100 m 0 50 x2 = 50 m 0 8. Yes, now you can plug in numbers (if you have them). Put a box around the final answer. D x = x2 - x1 D x = 50 m - 100 m D x = - 50 m D 0 x 100 x1 = 100 m The – sign is correct. It means we went from larger x to smaller x, using the axis system I chose. 50 x2 = 50 m 0 14