International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
EFFECT OF WALL THICKNESS VARIATION IN
HYPER ELASTIC SEMI-CYLINDRICAL FLUID
FILLED SILICONE RUBBER ROBOT FINGER ON
ITS LOAD CARRYING CAPACITY
P.Subramaniam
R.Marappan
Department of Mechanical Engineering.
Sengunthar Engineering College. Tiruchengode,
Department of Mechanical Engineering
K.S.R College of Engineering, Tiruchengode,
Abstract -- In this paper the influence of thickness variation in the outer wall of semi-cylindrical hyper elastic, fluid filled silicone
rubber robot finger on its load carrying capacity under static condition is studied. The shift of contact area, slip and the maximum
tensile stress in finger wall are the factors which determine the load carrying capacity of the robot finger. An analytical model is
used to determine the deformation and shift of contact area at various applied loads. Hyper elastic silicone rubber finger models
having different outer wall thicknesses are used for this analysis. The load carrying capacities of the fingers are determined for
different combinations of normal and the tangential loads. Experimental load tests were also conducted on the actual finger
specimens to validate the analytical findings. It is found that the analytical findings are closer to the experimental results.
Keywords : Hyper elastic Finger, Silicone rubber, Contact area, Shift, Slip, Stress.
I. INTRODUCTION
We, human beings can manipulate different objects because of the dexterity of our fingers. We can handle large
variety of objects from very hard to soft . At the same time we can sense the texture of the objects and according to that
the fingers deform and change the grasping force to avoid slipping. The deformation is an important factor in human
hand’s ability to create a stable and encompassing grasps on the object. Many attempts have been made to simulate the
human grasping in robot fingers [1,2]. The robot fingers having high stiffness do not deform more and they fail in
effective grasping. Xydas et al [3,4] developed a contact model and studied soft contact mechanics using FEA and
validated the results by experiments. Kwi-Ho Park et al [5] modelled a hemi spherical shaped soft finger tip for the robot
finger and performed a non linear finger analysis on its deformation. Biagiotti et al [6] modelled a hemispherical finger tip
having soft outer pad and rigid inner core to investigate their contact mechanics under normal and tangential loads. Xydas
and Koa [7] used FEA analysis and verified the results with experiments to support their proposed ‘power law’ =
. Where ′ is the radius of contact, ′ ′ is a constant depending on material and geometry of the finger tip, ′ is a
constant which has the range of 0
, that depends on the finger tip material. Dan Reznik and Christian Laugier [8]
developed a computational model for the dynamics of semi circular deformable finger–tip. Kojii Murakami and Tsuyomu
Hasegawa [9] of Kyushu university developed a finger tip model equipped with soft skin and hard nail and validated
using experimental results. Takaniro Inoue [10] proposed an elastic model, which comprised of linear spring elements
having constant Young’s modulus and formulated an equation for the deformation of the finger tip. Takaniro Inoue and
Shinichi Hirai [11] modelled a pair of hemispherical soft finger tips with 1-DOF grasping and manipulation of a rigid
object and validated by experiments. As an advancement in the finger modelling, Berselli and vassura [12] had designed a
finger model having outer finger pad of internal layers with fluid filled voids. This finger model gives good compliance
and damping property. Biagiotti et al [13] proposed a mechatronic design of finger model which is yet to be developed.
Still many attempts are being made on soft contact manipulation for humanoid like grasping. Any how very little work
was done on suitable finger material and its physical configuration. In this paper, fingers with different thickness outer
layer ,which are filled with viscous fluid in their core are subjected to different normal and tangential loads and the effect
of wall thickness on their load carrying capacity is studied.
II. FINGER MODEL
A semi cylindrical shaped soft finger model made up of silicone rubber with adequate length and radius has been
designed [14]. The finger model is made as a thin skin like hyper elastic outer wall filled with incompressible fluid,
which uniformly distributes the applied force to the wall. The force-deformation relationship has been formulated from
the basic principles of mechanics. The radius of the semi cylindrical finger is taken as ‘R’ and its outer wall thickness as
‘t’. The length of the finger is taken as ‘L’ and for simplicity of calculation it is considered as unity. The Young’s
modulus of finger material is ‘E’, which varies with applied load .The finger model is placed against a rigid flat
surface. Over the cross section of finger, the normal load ‘W’ is acting. This causes compression of finger against the
target surface and its deformation is ‘b’. Due to this compression, the pressure intensity of inside fluid is increased to ‘p’.
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 8
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
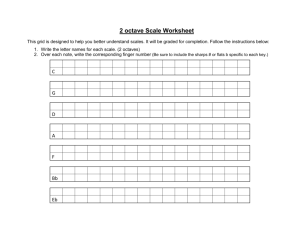
This inside pressure acting on the free curved surface, creates a tensile force in the finger layer and so it elongates by ‘δl’.
The reduction in volume of the finger due to the compression is compensated by this elongation, with lateral bulging of
the finger as shown in figure 1. Due to symmetry of the finger with respect to vertical axis, one quarter section is
considered for analysis.
Fig. 1 Finger deformation due to Normal load
At the balanced condition, a tangential force ‘Ft’ is acting along the finger outer wall at the fixed ends. Due to this tensile
force the wall thickness is reduced to ‘t1’. The half contact width of finger with the object surface is ’w’ and new
radius of the free curved surface is ‘R1’, which is less than the original radius ‘R’
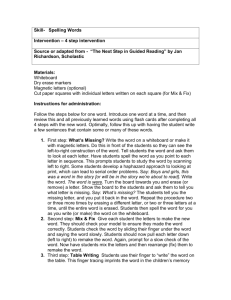
III. GRASPING AND LIFTING
On the above deformed finger model, a tangential pulling force is applied along the contact area as shown in
figure 2.
Fig. 2
Application of tangential load along the contact area
This applied force causes force imbalance on both sides of the finger with respect to the vertical axis ’OP’. The moment
caused by this force is balanced by a couple acting through the fixed ends creating a static balance. Since the fluid volume
is constant, during deformation, some amount of fluid from the right side quadrant is shifted to left side. By equating the
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 9
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
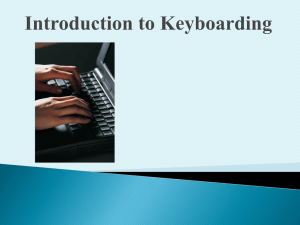
volume reduction in right side, to the gaining of left side, the volume balancing is achieved. The finger model under
equilibrium condition is shown in figure 3.
Fig. 3 Deformed finger model under force balanced condition
Considering unit length of finger, the area of contact is = 2 ×
Then, the contacting force =
=
×
×2×
×1
×1
Taking coefficient of friction between the rubber finger surface and the material as ′ ′ ,
The maximum load that can be lifted per unit length of finger , without slip
= 2×
×
×
Now, the finger shape is changed to accommodate the moment due to the force ‘F as shown in figure-3.
The Moment created
=
× ( − )(Clockwise) ⋯ ⋯ ⋯ ⋯ (1)
Hence for the equilibrium, there should be a balancing anticlockwise moment.
× (Anticlockwise) … … … … … . (2)
It is = 2 ×
Here, ‘N’ is the equivalent force to give required anticlockwise moment with respect to the centre ‘O’.
At equilibrium condition 2 ×
×
= ( − ).
From this ,N =
×(
)
×
Now this ‘N’ is also acting along the Normal load
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 10
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
So, the total upward force acting on the right side wall
=
Then, the tangential force acting in the right side wall,
=
+
(
)
The elongation of the right side wall due to the tangential force is
=
(
)
×
Now, new arc length=
′
×
ℎ+
On the free arc length, the inside pressure ‘p’ is acting on its projected area and creates a force, which is
perpendicular to its chord ‘MN’.
Then, force acting on the free curve = ×
This force is equal to the forces acting at the ends of the wall. So , it can be written as
( ×
) = [
+
(sin 90 − 2 )] + [
(cos 90 − 2 )] .-----------(A)
=
Similarly, the tangential force in the left side wall is
(
)
The elongation of the Left side wall due to this tangential force is
=
(
)
×
The new arc length=
×
′
ℎ+
On the left side free arc length, the same inside pressure ‘p’ is acting on its projected area and creates a force
which is perpendicular to its chord 1 1.
The force acting on the free curve = × 1 1
This force is equal to the forces acting at the ends of the left side wall. So , it can be written as
( ×
1 1) = [
+
(sin 90 − 2 )] + [
(cos 90 − 2 )] .-----------(B)
The above equations (A) and (B) hold good for particular angle values of , respectively, when the force
balance is achieved. Using deformation parameters of the model such as inside pressure, tangential force and contact width,
the force balancing has been achieved through iteration using a computer program by varying the value of ′ ′. After
reaching the force and volume balance, orientation of the deformed shape, its shift along the direction of force and tensile
stress in the finger are calculated.
IV. SHIFT OF CONTACT AREA AND TENSILE STRESS IN FINGER WALL
Because of application of Tangential force ‘F’ on the contacting area, it shifts in the direction of force. It is
measured from the shifting of the chord ‘MN’ to the new orientation. This shift causes the right side free wall to get more
radius of curvature and the left side wall more bulged with low curve radius. Also stress in the right side wall is increased
than the left side wall. The maximum tensile stress in the right side wall is calculated. Using a computer program, applying
different pre-stressing normal loads and tangential forces, the corresponding shift of contact area and maximum tensile
stress in the wall are found-out for 2 ,3, 4 and 6 mm outer wall thickness fingers.
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 11
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
V. EXPERIMENTAL LOAD TEST
Silicone rubber fingers similar to the analytical model were manufactured by liquid injection moulding as per ASTM
D 695 standard. The mean radius of finger was 10 mm and the length of finger was 30 mm. The fingers having outer wall
thickness of 2,3,4 and 6 mm are moulded for the load test. Figure 4 shows the sample silicone rubber fingers. The inner
cavity was filled with SAE 30 oil and the top opening was sealed by screwing a flat steel plate over it.
Fig. 4
Sample silicone rubber fingers
A special sliding table mechanism was designed and fabricated for the testing purpose. It consisted of a top sliding
table mounted over a bottom rigid plate and in-between them frictionless spherical steel balls are provided in horizontal
semi cylindrical guide ways. They freely roll in the guide ways to provide sliding motion to the top sliding table over the
bottom one. Over this table, the fluid filled hyper elastic robot finger was rigidly fixed using a face plate.
The test was conducted in a compression testing machine, supplied by AVJ Engineering Industries, India. It has the
maximum loading capacity of 25 kN, with a least count of 0.01 N. A strain gauge load-cell was mounted with its fixed top
platform to measure the applied normal load. One mechanical dial gauge was fitted between the top and bottom platforms
to measure the vertical compression and the other one between the fixed and moving table to measure the shift of contact
area of the finger. The accuracy of the dial indicators was ± 0.001 mm.
Fig.5
Slip and shift test set up for robot fingers
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 12
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
The finger specimen was placed over the moveable bottom platform and rigidly fixed. The finger mounted slide was
tied to a string, to the other end of which a dead-weight hanger was attached and suspended through a pulley mechanism
for loading purpose. Figure 5 shows the test set-up. By applying normal load on the finger, grasping contact was created
between the finger and the target surface. Then a tangential pulling load was slowly applied to the slide through the string,
by the pulley and dead weight arrangement. By increasing the dead weight the horizontal shift was noted down until the
plate slipped. At slipping condition the tangential applied load and the normal load were noted down. The test was repeated
for three times and the mean value was taken for calculation. The experiment was repeated for different normal loads and
the shift , slip details were noted down . This was carried out for all the four different wall thickness fingers. Now, the
tangential loads at which slipping takes place are plotted against their respective applied normal loads. By taking
coefficient of friction between silicone rubber and steel surface as 0.6 [9], the slipping tangential load for the same applied
normal load is analytically calculated and also plotted in the same graph. The coefficient of friction assumed, gives the
slipping load, which is closer to that of experimental results.
VI. RESULTS AND DISCUSSION
In figure 6, shift of contact area and tensile stress in the finger layer are plotted against applied normal load for a
finger with 2 mm wall thickness. By joining the slip points on the shift curve , the shift boundary is obtained. Similarly by
joining the slip points on the stress curve , the stress boundary is obtained.
Fig. 6
Safe working area of the finger with 2 mm wall thickness
The area trapped under these limiting boundary lines is the safe working area for the finger. Within these boundaries, as the
applied normal load is increased the shift of contact area is found to decrease, but the tensile stress in the wall increases.
The tangential load lifting capacity of the finger, both experimental and theoretically assumed values are plotted against
applied normal load in figure 7(a). Contact area and the local normal load acting on the contact area are also plotted in the
same figure. It is seen that the theoretically assumed values of load lifting capacity of the finger is almost nearer to the
experimentally obtained values.
Fig.7(a) Variation of Contact area , Local normal load, Analytical and Experimental values of tangential load
against Applied normal load for a finger with 2 mm wall thickness.
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 13
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
The deviation may be due to the assumed coefficient of friction, which seems to be slightly on the higher side for the
material that is used. Normally these lines should be straight lines as the coefficient of friction between two materials will
be a constant, as it is a material property. But here the slope of these lines increase as the normal load increases, which
means that the apparent coefficient of friction increases.
It is seen from the same figure that the slope of contact area curve decreases, while that of the local normal load (as
shown in figure 7(a)) and inside fluid pressure (as shown in figure 7(b)) are increasing. It means that, when the applied
normal load is increased the local normal load increases with increased rate. This increased local normal load actually
decides the load lifting capacity of the finger. That is, the coefficient of friction being constant, the higher values of local
normal load facilitates higher load carrying capacity, even though the applied normal load has not increased to that extent.
Hence apparent coefficient of friction calculated based on applied normal load and load carrying capacity of the finger will
keep increasing.
0.18
Inside Fluid Pressure in 'N/sq mm'
0.16
0.14
0.12
0.1
0.08
0.06
0.04
0.02
0
0
Applied Normal load in 'N'
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Fig.7(b) Variation of Inside fluid pressure of finger against Applied normal load .
Figures 8 to 10 show the safe working areas of 3,4 and 6 mm wall thickness fingers.
Fig. 8
Safe working area of the finger with 3 mm wall thickness
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 14
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
Fig. 9
Fig. 10
Safe working area of the finger with 4 mm wall thickness
Safe working area of the finger with 6 mm wall thickness
As the wall thickness of the finger increases, the induced stress for equal applied normal loads reduces and hence
the stress lines are brought down. This leads to shifting of stress boundary towards the right side. As the wall thickness
increases, for a particular applied normal load, slipping takes place earlier or for a lower value of horizontal load lifted as
shown in figure 11. The reason is that for thicker walls , the contact area is smaller and hence the local normal load is
smaller and hence slip takes place for a lower value of tangential load. This is clear from the figure 12, in which local
normal loads are plotted against applied normal loads for different wall thickness fingers.
2.5
2
Tangential load at slip in 'N'
2 mm wall finger
1.5
1
0.5
3 mm wall finger
4 mm wall finger
6 mm wall finger
Applied normal Load in 'N'
0
0
0.5
Fig. 11
1
1.5
2
2.5
Variation of tangential load that can be lifted without slip against
applied normal load of different wall thickness fingers
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 15
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
Fig.12
Variation of local normal load against applied normal load at slipping condition of different wall thickness fingers
VII. CONCLUDING REMARKS
When a hyper elastic, semi-cylindrical fluid filled robot finger made up of silicone rubber with a specific wall
thickness is subjected to normal and tangential loads ,
1.
2.
3.
4.
5.
6.
The tensile stress in the wall increases and the shift of contact area decreases as the normal load is
increased.
Stress and shift limits at slipping condition are the boundary lines for the finger to operate.
Under identical loading conditions as the finger wall thickness increases, the stress and shift of contact
area reduce.
Increasing the wall thickness increases the range of load lifted.
When applied normal load is increased the local normal load increases, with increasing rate giving an
increase in the value of apparent coefficient of friction.
For a particular value of applied normal load, finger with thin wall thickness is capable of lifting higher
loads, as the local normal load is higher for this finger due to higher contact area and higher fluid
pressure.
ACKNOWLEDGMENT
The authors wish to acknowledge the Sengunthar Educational Trust, Tiruchengode for providing facilities to do
this research work.
REFERENCE
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
Mohammad Asim Farooqi, Takashi Tanaka, YukioIkezawa, Toru Omata and Kazuyuki Nagata (1999) ‘Sensor
based control for the execution of re-grasping primitives on a multi fingered robot hand’, Proceedings of IEEE
International Conference of Robotics and Automation, PP 3217-3223.
Takeshi Matsuoka, Tsutomu Hasegawa and Kyuhei Honda, (1999) ‘A dexterous manipulation system with error
detection and recovery by a multi fingered robotic hand’ ‘Proceedings of IEEE International Conference on
Intelligent robots Robotics and systems, PP 418-423.
Xydas. N, Koa. I (September -1999) ‘ Modeling of contact mechanics and friction limit surface for soft fingers
with experimental results’, International Journal of Robotic research , 18(9): 941-950.
Xydas. N, Imin Kaot, (2000) ‘Influence of material properties and finger tip size on the power law equation for
soft fingers’, Proceedings of the IEEE/RSJ International conference on intelligent robots and systems.
Kwi-Ho Park, Byoung-Ho Kim and Shinichi Hiraj, (2003) ‘Development of a soft finger tip and its modeling
based on force distribution’ Proceedings of IEEE International Conference of Robotics and Automation,
PP 3269-3174.
Biagiotti.L, Tiezzi.P, Vassura.G and Melchiorri.C, ’ Modelling and controlling the compliance of a robot hand
with soft finger pads’, DEIS University of Bologna, Italy.
Nicholas Xydas, Milind Bhagavat and Imin Kao, (2000) ‘Study of soft finger contact mechanics using finite
element analysis and experiments’, Proceedings of IEEE International Conference of Robotics and Automation,
PP 2179-2183,
Dan Reznik and Christian Laugier, ‘Dynamic simulation and virtual control of deformable finger tip’, University
of California.
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 16
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2163
Volume 1 Issue 8 (September 2014)
www.ijirae.com
[9]
[10]
[11]
[12]
[13]
[14]
Koji Murakamii and Tsutomu Hasegawa , ‘Design of robotic finger tip based on human-miemetic functions’,
Kyushu University
Takahiro Inoue Shinichi Hiri, (2005) ‘Elastic model of deformable finger tip for soft fingered manipulation’,
IEEE Transaction on Robotics, Vol.1 , No 11.
Takahiro Inoue Shinichi Hiri, ‘ How Hemispherical soft fingertips enhance dexterity in Grasping and
manipulation’ , Kusatsu, Shiga-525-8577, Japan.
Berselli.G, Vassura,G. (July 2010), ‘ Non linear Modeling and Experimental Evaluation of Fluid filled Soft pads
for robotic hands’ , 9-th Youth Symposium on experimental Solid Mechanics, Trieste, Italy ,
Biagiotti.L, Lotti.F, Melchiorri.C and Vassura.G, (2003), ’Mechatronic design of Innovative Fingers for
Anthropomorphic Robot Hands’, ‘Proceedings of IEEE International Conference of Robotics and Automation,
PP 3187-3191,
Subramaniam. P and Marappan. R , (2013) ‘Semi Cylindrical Fluid Filled Hyper elastic Finger Model for Soft
Contact’, International Journal of Engineering and Technology, Engg Journals Publications, Volume – 5: 6 ,
Page 1131-1137.
__________________________________________________________________________________________________
© 2014, IJIRAE- All Rights Reserved
Page - 17