Joint Scheduling and Relay Selection in One- and Two
advertisement

This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE ICC 2009 proceedings
Joint Scheduling and Relay Selection in One- and
Two-Way Relay Networks with Buffering
Lianghui Ding, Meixia Tao, Fan Yang, Wenjun Zhang
Department of Electronic Engineering
Shanghai Jiao Tong University, China
Email: {lhding, mxtao, 46265878, zhangwenjun}@sjtu.edu.cn
Abstract— In most wireless relay networks, the source and
relay nodes transmit successively via fixed time division (FTD)
and each relay forwards a packet immediately upon receiving. In
this paper we enable the buffering capability of relay nodes and
propose a framework for joint scheduling and relay selection.
The goal is to maximize the system long-term throughput by
fully exploiting multi-user diversity in the network. We develop
two joint scheduling and relay selection (JSRS) algorithms for
unidirectional and bidirectional traffic, respectively. The novel
cross-layer relay selection metrics which our algorithms are based
upon take into account both instantaneous channel conditions
and the queuing status. We also demonstrate that the proposed
JSRS can be realized in a distributed way without explicit
coordination among the network nodes. Extensive simulation
is carried out to evaluate the performance of the proposed
JSRS with buffering in comparison with traditional FTD without
buffering. Typical throughput enhancements up to 101% and
110% are observed in one-way and two-way relay networks
respectively, at low signal-to-noise ratio (0 dB).
I. I NTRODUCTION
Relay transmission can enhance the reliability, increase the
rate and save the power in wireless networks [1], and thus has
received considerable attention from researchers recently [2]–
[10]. The two popular relay strategies are known as decodeand-forward (DF) and amplify-and-forward (AF) [1]. In a
multiple-relay network, relay selection is a promising technique to improve the system performance. Relay selection
for minimum packet error probability is analyzed for DF
in [2], for AF in [3] and for hybrid DF and AF in [4]. Relay
selection for minimum outage probability under an aggregate
power constraint is analyzed in [5]. Authors in [5], [6] also
presented a timer-based distributed relay selection algorithm
which requires no topology information.
Currently, two-way relaying is shown to be able to significantly reduce the spectral loss caused by the half-duplex
constraint in practical systems when compared with unidirectional relaying [7]. There are also DF and AF modes
for two-way relay networks, in which the AF relay strategy
is similar to that in one-way relay network, while the DF
applies the concept of network coding. One popular two-way
DF strategy is to let the relay node perform bit-level XOR
operation on the information packets received from the two
source nodes and then broadcast the new packet to the two
This work is supported in part by Shanghai Educational Development
Foundation (No. 2008CG14) and in part by Natural Science Foundation of
Shanghai (No. 08ZR1410400).
desired receivers simultaneously [8]–[10]. The conventional
relay selection methods proposed for unidirectional traffic may
be applied to the bidirectional communication scenario after
some modifications. In [11], a bidirectional relay selection
criterion is proposed, wherein the relay is chosen to maximize
the weighted sum of the bidirectional rate pair on the boundary
of the achievable rate region.
In the aforementioned research on both one-way and twoway relay networks, it is always assumed that the source and
relay nodes transmit in successive time slots. In other words,
the relay node forwards the received packets immediately
(with or without processing the signal) and there is no need for
the relays to buffer them. We refer to this kind of scheduling
method as fixed time division (FTD). If, however, the endto-end delay requirement of the traffic is not stringent, the
scheduled transmission between the source and relay nodes
with respect to the instantaneous channel condition can be
exploited to obtain multi-user diversity and hence improve the
long-term throughput of the system. This requires the relay
nodes to have buffer to store the received packets. So far, to
our best knowledge, little work has considered the scheduling
issue among source nodes and relay nodes in relay networks.
In this paper, we consider the joint scheduling and relay
selection in relay networks for both one-way and two-way
communications. Each relay is assumed to have enough (but
not infinite) buffer size. We propose a cross-layer relay selection metric that takes into account both the instantaneous
channel condition and the queuing status. Using this metric,
we then schedule the transmission between the source nodes
and relay nodes. Simulation results show that the system
throughput is improved significantly compared with traditional
relay selection using fixed time division (FTD) scheme.
The rest of the paper is organized as follows: In Section II,
we present the system model of one- and two-way relay
networks and discuss the optimal relay selection for FTD
scheme. Section III, we propose our joint scheduling and relay
selection (JSRS) algorithms. Simulation results are given in
Section IV. Finally, we conclude the paper in Section V.
II. N ETWORK M ODEL AND R ELAY S ELECTION WITHOUT
B UFFERING
In this section, we introduce the network model and disucss
the optimal relay selection criteria of the fixed time division
978-1-4244-3435-0/09/$25.00 ©2009 IEEE
This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE ICC 2009 proceedings
(FTD) based scheduling in both one-way and two-way relay
networks.
A. Network Model
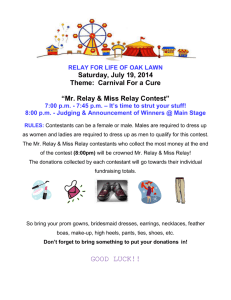
As shown in Figure 1, we consider a relay network that
consists of a source node s, a destination node d, and K
relay nodes. For bidirectional traffic, the destination node
d is also a source node, and node s is also a destination
node. Thus, instead of calling them as source or destination
nodes, we simply mention them as node s or node d in the
case of bidirectional traffic. There are two buffers in each
relay, Bks and Bkd , for packets received from nodes s and d,
respectively. In the case of unidirectional traffic, only Bks is
needed. The queue sizes of Bks and Bkd are denoted as Qsk and
Qdk respectively.
Bs
Bd
1
B
1
1
s
B
2
d
2
2
s
B
.
.
.
.
.
.
.
.
.
s
K-1
d
B dK
-1
K-1
B sK
B dK
K
Fig. 1.
Network model of one- and two-way relaying with buffering.
Throughout this paper, we make following assumptions. The
transmission is time slotted and packet-based [12]. In each
time slot, a packet is transmitted with a rate determined by
the current channel condition. The length of the time slot, or
equivalently the transmission time of each packet, is adaptive
with respect to the channel gain. The channel coefficients
between any pair of nodes in the network are all independent.
The channel coherence time of each link is much larger than
the duration of each packet transmission, but much smaller
than the delay requirement of the transmission application.
There is no direct link between node s and node d. Each
relay adopts DF relaying strategy. In the case of one-way
relaying, the relay node just re-encodes the detected packet
from the source and transmits to the destination. For twoway relaying, the relay node performs bit-level XOR operation
on the two detected packets from nodes s and d, re-encodes
the resulting new packet and then broadcasts it to s and d
simultaneously. In addition, each transmitting node has the
same and fixed transmission power, and the channel gains
of forward and reverse links are symmetric. That means the
maximum achievable rate from node i to node j is the same
as that from node j to node i, for i, j ∈ {s, d, r1 , . . . , rK }.
B. Relay Selection without Buffering
In this subsection, we present the relay selection criteria
using the traditional FTD based scheduling. Let Cij denote
the maximum achievable transmission rate in bits/sec/Hz of
the link lij from node i to node j. It is a function of the
instantaneous channel condition of the link and given by
Cij = log(1 + γ0 αij ),
(1)
where γ0 is the average received signal-to-noise ratio (SNR)
and assumed to be same for the active links considered
in this paper, and αij is the composite channel gain. The
composite channel gain contains two components, the small
scale normalized Rayleigh fading, and the shadowing that
follows log-normal distribution.
To facilitate the XOR-based combining at each relay node
and the XOR-based detection at each desired destination node
in the case of bidirectional traffic, we also assume that all
the packets are numbered and contain the same number of
information bits. Without loss of generality, the length of each
packet is normalized to one. Thus the transmission time of link
lij is 1/Cij , which as a result depends on the channel gain
αij .
In one-way relay networks, suppose relay k is selected to
forward packets. Then, the end-to-end transmission time of a
packet from the source s to the destination d is [13]
1
1
+
.
(2)
t1w
k =
Csrk
Cdrk
Therefore, the optimal relay selection criterion is to select the
relay node with the minimum transmission time.
In two-way relay networks, there are two XOR-based relay
schemes, which are the 2-step-XOR and the 3-step-XOR [9].
For the 2-step-XOR, both nodes s and d transmit to relay
nodes simultaneously in phase I, and the relay nodes forward
the combined packet in phase II. For 3-step-XOR, nodes s
and d send packets to relay k sequentially in the first two
phases. And the rates are Csrk and Cdrk respectively. In
the last phase, the relay decodes and combines the received
packets and broadcasts it with the rate min{Csrk , Cdrk } so
that both s and d can decode it. Although the 2-step-XOR
scheme achieves larger sum-rate than 3-step-XOR from the
information theoretical perspective [9], it has no explicit rate
expression, requires tight synchronization, and is more difficult
to be applied to existing networks. Thus, we only consider the
3-step-XOR scheme here. Nevertheless, the proposed JSRS
algorithm in Section III can be extended to 2-step-XOR easily.
For 3-step-XOR, the total time of one round of packet
exchange between nodes s and d through relay k is given
by
1
1
1
.
(3)
+
+
t2w
k =
Csrk
Cdrk
min{Csrk , Cdrk }
As a result, the relay with the minimum t2w
k should be selected.
III. J OINT S CHEDULING AND R ELAY S ELECTION
In this section, we propose the joint scheduling and relay
selection algorithms (JSRS) with buffering for both one-way
and two-way relay networks, and discuss how to realize JSRS
in a distributed way.
A. One-Way Relay Networks
In one-way relay networks, the packets are transmitted
from the source node to the destination with the help
from relay nodes, and there is a buffer Bks at each relay k. The link space for transmission scheduling is L =
{lsr1 , lsr2 , . . . , lsrK , lr1 d , lr2 d , . . . , lrK d }.
This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE ICC 2009 proceedings
We assume that there are always packets waiting for transmission at the source node. Note that after the system enters
into a steady state, where the buffers at all the relay nodes
are non-empty and finite, the long-term throughput of the
system can be maximized by scheduling the link in L with
the maximum rate for transmission at each time slot.
In practice, the buffer of each relay is empty at the very
beginning of the transmission. During the transmission, it is
possible that the buffer of the relay with the maximum rate
Crk d to the destination among all K relay nodes is empty,
while the buffer of the relay with the maximum rate Csrk is
full already and cannot accept any more packet. Taking these
practical issues into account, we should consider the following
two principles for joint scheduling and relay selection.
• When the buffer of relay k is full, the source node should
not transmit packets to it until it sends out some packets
and has space for new ones.
• When the buffer is empty, the relay node should not
transmit. When the queue size becomes large, the relay
should have a high priority to transmit even its rate to the
destination is not the maximum. Or the buffer overflow
may happen.
Given the above principles, it is difficult to rigorously
formulate the joint scheduling and relay selection problem
for throughput maximization. Thus we propose a heuristic
algorithm, which works as follows.
Let us first define a factor to indicate the queuing status of
the buffer at each relay k, for k = 1, . . . , K, as follows:
αk = 1 −
Qs
I(Qsk ) ks ,
Bk
(4)
where Bks is the buffer size of relay node k, and Qsk is the
queue size, or equivalently the number of packets in the buffer
Bks . Here, I(·) is an indication function defined as follows.
1,
if x > 0,
I(x) =
(5)
−∞, if x == 0.
Then we scale the transmission rate of each relay to the
destination by the queuing factor αk as, while keeping the
rate of the source to each relay unchanged.
Cr k d
Cr d
= k .
αk
(6)
The rate space after scaling C = {Csr1 , Csr2 , . . . , CsrK , Cr 1 d ,
Cr 2 d , . . . , Cr K d } is now treated as a cross-layer relay selection
metric. Our proposed JSRS algorithm is then to select the
link from the link space L with the maximum rate in C for
transmission. It can be seen that when the queue size Qsk of
relay k increases, the rate Cr k d also increases and relay k
obtains higher priority to transmit. When the buffer of relay k
is full, the corresponding Cr k d approaches infinity and, thus,
relay k would obtain the highest priority to transmit.
B. Two-Way Relay Networks
In two-way relay networks, the aim of the joint scheduling
and relay selection is to maximize the total throughput, subject
to the condition that the throughput of each path is equal to
each other. This can be represented as
max Tsr
s.t. Tsr = Tdr = Tr ,
(7)
where Tsr , Tdr , Tr denote the throughput from node s to the
relays, the throughput from node d to the relays, and that from
the relays to nodes s and d, respectively.
Buffer-empty and buffer-overflow issues should also be
considered in two-way relay networks. In addition, since each
transmitting relay should take one packet from each of its two
buffers to perform XOR, it must ensure that neither of the two
buffers are empty before being scheduled .
Thus, we should consider following three principles in JSRS
for two-way relay networks:
s
• When Bk is full, the node s should not transmit packets
to relay k until it sends out some packets. Likewise, the
node d should not transmit to relay k if Bkd is full.
s
d
• When either Bk or Bk is empty, the relay k should not
be scheduled. When either the queue size Qsk or Qdk
approaches the size of the buffer, the relay k should have
a high priority to transmit.
s
d
• If Qk << Qk , the node s should transmit with high
priority, and vice versa.
Given the above principles, we now introduce our proposed
JSRS algorithm in the following. First, define three factors βk ,
γsk and γdk as:
βk = 1 − I(Qk,min )
Qk,max
,
max(Bks , Bkd )
(8)
γsk = 1 + I2 (Qsk , Bks )
Qsk − Qdk
,
min(Bks , Bkd )
(9)
γdk = 1 + I2 (Qdk , Bkd )
Qdk − Qsk
,
min(Bks , Bkd )
(10)
where Qk,max = max(Qsk , Qdk ), Qk,min = min(Qsk , Qdk ), I(·)
is given in (5) and I2 (Q, B) is defined as
1, if Q < B,
(11)
I2 (Q, B) =
∞, if Q = B.
From the definition (8), βk indicates the buffer status at relay
k. If Qk,min > 0, βk is an increasing function of Qk,max . From
the definition (9), γsk characterizes the fairness between Qsk
and Qdk at relay node k from the perspective of node s. If
γsk ≤ 1, there are more packets from node d than that from
node s at relay node k. If 1 < γsk ≤ 2, Qsk is larger Qdk .
If γsk = ∞, the buffer Bks is full, and the node s should not
transmit in this time slot. Likewise, the fairness between Qdk
and Qsk at relay node k from the perspective of node d is
characterized by γdk as defined in (10).
After introducing the above three factors, the set of the
scaled rates on all the possible links becomes:
C = min(Csr1 , Cdr1 )/β1 , min(Csr2 , Cdr2 )/β2 ,
. . . , min(CsrK , CdrK )/βK ,
(12)
Csr1 /γs1 , Csr2 /γs2 , . . . , CsrK /γsK ,
Cdr1 /γd1 , Cdr2 /γd2 , . . . , CdrK /γdK
This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE ICC 2009 proceedings
The set C in (12) is now treated as the cross-layer relay
selection metrics. Then our proposed JSRS algorithm schedules the link with the maximum rate in C in each time slot.
By using the queuing factor βk , the relay node with the larger
queue size obtains higher priority for transmission if neither of
its buffers is empty. If one buffer is empty, the scaled rate of
relay k for broadcasting becomes small enough and hence will
not be scheduled. By using the fairness factors γsk and γdk ,
the relay with more severe unfairness obtains higher priority
to receive packets from node s or node d.
C. Discussion on Distributed Realization
The two JSRS algorithms proposed above can be realized
in a distributed way similar to that in [5]. For the ease of
presentation, the distributed relay selection for one-way relay
networks without buffering in [5] is briefly described here.
The source and destination nodes firstly handshake with some
short packets, such as request-to-send (RTS) and clear-to-send
(CTS) packets as in IEEE 802.11 based ad hoc networks,
through which each relay node estimates its channel conditions
associated with both the source and the destination. Note that
the exchange of RTS and CTS packets between the source
and the destination is reasonable, for the transmission rates of
them is relatively slow. Then each relay computes its overall
performance metric, such as the end-to-end transmission time
in (2), and starts a timer with the delay proportional to it. The
timer of the relay with the minimum transmission time will
timeout first and the relay sends a short packet to inform the
source. Then the source will start transmitting to that relay.
For JSRS in one-way relay networks, the handshaking
between the source and the destination is still needed for the
relay nodes to obtain the channel state information. After the
handshaking, each relay computes the cross-layer metrics Csrk
and Cr k d according to its buffer status and channel conditions,
and starts a timer with the delay inversely proportional to
max(Csrk , Cr k d ). Note that, unlike the traditional relay selection, when the timer of a relay, say relay k ∗ , counts down
to zero firstly, two different cases need to be considered. If
the maximum rate of relay k ∗ is Csrk∗ , then relay k ∗ sends a
short packet to the source node to trigger the transmission at
the source node. Otherwise, if the maximum rate is Cr k d , the
relay will send the packet in its queue directly in the following
time slot to the destination.
For JSRS in the two-way relay networks, the algorithm is
similar. After timeout occurs, the relay with the maximum
max{min(Crk s , Crk d )/βk , Csrk /γsk , Cdrk /γdk } sends an informing packet to node s or node d, if the maximum rate is
achieved at Csrk /γsk or Cdrk /γdk . Or the relay node will send
the XORed packets to nodes s and d directly.
Through the timer scheme, we can realize the joint scheduling and relay selection (JSRS) in a distributed way. The
derivation of the collision probability and the analysis of the
theoretical performance are left as the future work.
IV. S IMULATION R ESULTS
In this section, we evaluate the performance of the proposed
JSRS compared with fixed time division (FTD) scheme for
both one-way and two-way relay networks. The effects of
average SNR, numbers of relay nodes, and buffer sizes are
studied. In all the simulation, the variance of the log-normal
shadowing is set to be 5 dB.
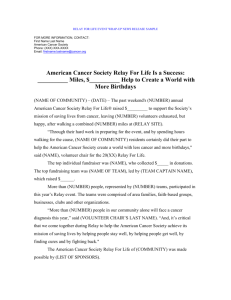
A. Throughput vs. Number of Relays
The throughput comparison between JSRS and FTD at
different number of relay nodes is given in Figure 2. Three
average SNR values −10 dB, 0 dB, and 10 dB are considered.
As shown in Figure 2, in both one-way and two-way relay
networks, the throughput gain of JSRS over FTD is significant
at all number of relays. In specific, as shown in Figure 2(a),
for one-way relay networks with five relay nodes, the average
throughput gains in bits/sec/Hz are 0.04, 0.27, and 0.57 when
γ0 = −10dB, 0dB, and 10dB, respectively. As shown in
Figure 2(b), for two-way relay networks with five relay nodes,
the average throughput gains in bits/sec/Hz are 0.05, 0.35, and
0.82 when γ0 = −10dB, 0dB, and 10dB, respectively. These
gains are expected as JSRS can achieve the macro-diversity
gain brought by relay nodes but also the multi-user diversity.
From the figure it is also seen that the throughput of both
JSRS and FTD increases as the number of relay nodes. The
throughput with two relay nodes is significantly larger than
that with only one relay, while the throughput increasing rate
decreases as the number of relay increases. This agrees with
the diminishing effect of diversity gain.
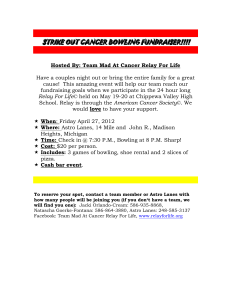
B. Throughput Improvement Ratio vs. Buffer Size
The buffer sizes of each relay are fixed to be B = 500 and
B = 1000 here. Figure 3 shows the throughput improvement
ratios of JSRS over FTD with the two buffer sizes at different
average SNR. Generally, the throughput improvement ratio
decreases as the average SNR increases, for the relative
difference between the rate of each link decreases as the
channel gain increases. For one-way relay networks as shown
in Figure 3(a), the throughput improvement ratio with larger
buffer sizes is larger than that with smaller values. When the
average SNR is large, the throughput improvement ratio with
one relay is larger than that with four relay nodes. However,
for γ0 < −8 dB with B = 1000, and γ0 < 0 dB with
B = 500, the throughput improvement ratio with one relay
is smaller than that with four relay. It indicates that JSRS
utilizes the space diversity gain with relatively small channel
gain better than that with larger channel gain. Note that the
absolute rates of both JSRS and FTD with small average SNR
is small, although the ratio is large.
For the two-way relay networks as shown in Figure 3(b),
the throughput improvement ratios with larger buffer size are
a bit larger than that with smaller buffer size. The ratio with
one relay is much larger than that with four relay nodes, since
the absolute throughput of both JSRS and FTD with four relay
nodes is larger than that with only one relay, while the gap is
not increased as explained in Section IV-A.
This full text paper was peer reviewed at the direction of IEEE Communications Society subject matter experts for publication in the IEEE ICC 2009 proceedings
2.5
1.5
Throughput Improvement Ratio
FTD
JSRS
Rate (bits/sec/Hz)
2
1.5
γ0 = 0 dB
1
γ = 10 dB
0
γ0 = −10 dB
0.5
B=1000
B = 500
1
# Relay = 1
0.5
# Relay = 4
0
−10
0
0
5
10
15
Number of Relay Nodes
−5
20
0
5
10
Average SNR per Link (dB)
15
20
(a) One-way relay networks
(a) One-way relay networks
2
B = 1000
B = 500
3
Rate (bits/sec/Hz)
2.5
2
1.5
1
γ0 = 0 dB
γ0 = −10 dB
γ = 10 dB
0
1.6
# Relay = 1
1.4
1.2
1
0.8
0.6
# Relay = 4
0.4
0.5
0
0
Throughput Improvement Ratio
1.8
FTD
JSRS
0.2
−10
5
10
15
Number of Relay Nodes
20
−5
0
5
10
Average SNR per Link (dB)
15
20
(b) Two-way relay networks
(b) Two-way relay networks
Fig. 2. Throughput of JSRS and FTD with different number of relay nodes
in both one-way and two-way relay networks.
The results in Figure 3 show that the performance of our
JSRS algorithm is mainly influenced by the channel gain and
the number of relay nodes, while the buffer size has minor
impact on it.
V. C ONCLUSION
It is shown in this paper that the joint scheduling and
relay selection with buffering can improve the rate of both
one-way and two-way relay networks. We introduced the
optimal relay selection metrics for fixed time division (FTD)
scheme, and then proposed our joint scheduling and relay
selection algorithms JSRS for both one-way and two-way relay
networks with the novel cross-layer relay selection metrics
taking into account both instantaneous channel conditions and
queuing status. We also discussed that JSRS can be realized
in a distributed way without explicit coordination among the
network nodes. Simulation results show that the throughput of
JSRS is significantly larger than that of FTD. The results also
show that the buffer sizes only have a minor influence on the
performance of JSRS. In the future work, we will investigate
the delay performance and power control.
R EFERENCES
[1] A. Nosratinia, T.E. Hunter, and A. Hedayat, “Cooperative communication in wireless networks,” IEEE Commun. Magazine, vol. 42, no. 10,
pp. 74–80, Oct. 2004.
Fig. 3. Throughput improvement ratio with different buffer sizes in both
one-way and two-way relay networks.
[2] Y. Zhao, R. Adve, and T. J. Lim, “Improving amplify-and-forward relay
networks: Optimal power allocation versus selection,” IEEE Trans. on
Wireless Commun., vol. 6, no. 8, Aug. 2007.
[3] E. Beres, and R. Adve, “On selection cooperation in distributed networks,” in Proc. CISS, Mar. 2006.
[4] Y. Li, B. Vucetic, Z. Chen, and J. yuan, “An improved relay selection
scheme with hybrid relaying protocols,” in IEEE Proc. GLOBECOM,
Nov. 2007.
[5] A. Bletsas, H. Shin, and M. Z. Win, “Cooperative communications
with outage-optimal opportunistic relaying,” IEEE Trans. on Wireless
Commun., vol. 6, no. 9, pp. 3450–3460, Sep. 2007.
[6] A. Bletsas, A. Khisti, D. P. Reed, and A.Lippman, “A simple cooperative
diversity mothod based on network path selection,” IEEE JSAC, vol. 24,
no. 3, pp. 659–672, Mar. 2006.
[7] B. Rankov, and A. Wittneben, “Spectral efficient signaling for halfduplex relay channels,” IEEE JSAC, vol. 25, no. 2, Feb. 2007.
[8] P. Larsson, N. Johansson, and K. E. Sunell, “Coded bidirectional
relaying,” in IEEE Proc. VTC-Spring, vol. 2, May. 2006, pp. 851–855.
[9] P. Popovski, and H. Yomo, “Physical network coding in two-way
wireless relay channels,” in IEEE Proc. ICC, Jun. 2007, pp. 707–712.
[10] P. Popovski, and H. Yom, “Bidirectional amplification of throughput in
a wireless multihop networks,” in IEEE Proc. VTC-Spring, May. 2006,
pp. 588–593.
[11] T. J. Oechtering, and H. Boche, “Bidirectional regenerative half-duplex
relaying using relay selection,” IEEE Trans. on Wireless Commun.,
vol. 7, no. 5, May. 2008.
[12] Y. Wu, P. A. Chou, and S. Y. Kung, “Information exchange in wireless
networks with network coding and physical-layer broadcast,” in Proc.
2005 Conference on Information Sciences and Systems, Mar. 2005.
[13] O. Oyman and S. Sandhu, “Non-ergodic power-bandwidth tradeoff in
linear multi-hop networks,” in Proc. ISIT, Jul. 2006.