Manipulation and control 2010 Instructor: Dimitar Dimitrov eMail
advertisement

Örebro University
Support notes
Course:
Manipulation and control
2010
Singularity functions
(in this handout we will follow [1])
Main points covered
Instructor: Dimitar Dimitrov
Office: T2228
eMail: dimitar.dimitrov@oru.se
Tel: 30 14 82
Question hours: ask appointment by email
www.aass.oru.se/Research/Learning/drdv.html
• Unit-step function
• Unit-ramp function
• Unit-rectangle function
• Unit-triangle function
• Signum function
• Unit-impulse
• Combinations of functions
• Amplitude scaling, time shifting and time scaling
1
2
Unit-step function
2
1.5
1.5
step(t)
1
1
0.5
0.5
0
t
0
on
−0.5
off
on
−0.5
−3
−2
−1
0
1
2
3
2
3
−1
1.5
step(t)
−1.5
1
−2
−2
0
2
4
6
8
10
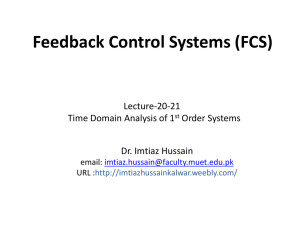
Figure 1: Example of a sine signal switched on and off. In red is depicted the actual signal,
in dashed blue is a sinusoid. In dashed green is depicted a signal used specify the on and off
times for the sinusoid.
0.5
−0.5
−3
Sines, cosines, and exponentials are all continuous and
differentiable functions at every point in time. In practice,
many important signals are not continuous and differentiable, due to operations like switching a signal on and off
for example.
Question: how to describe the signal in Fig. 1?
t
0
−2
−1
0
1
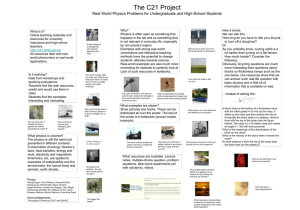
Figure 2: The unit-step function according to definition (1) (bottom). The top figure depicts
a common way of drawing the unit step. Usually step(t) is denoted simply by u(t).
We define the (continuous time) unit-step function as
1,
step(t) = 12 ,
0,
t>0
t=0
t<0
(1)
Signals of this type can be easily (mathematically) described by multiplying a function that is continuous and
differentiable (in the above case sinusoid) by another function that switches from zero to one or from one to zero at
some finite time.
The unit-step function is useful, because it can mathematically represent a common action in real physical systems - fast switching from one state to another.
3
4
Unit-ramp function
Unit-rectangle function
2.5
2
2
1.5
1.5
rect(t)
ramp(t)
1
1
0.5
0.5
t
0
t
0
−0.5
−0.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−2
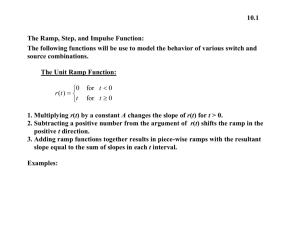
Figure 3: The unit-ramp function (in blue). In green dashed line is depicted the unit-step
function.
Another common type of signal is one that is switched on
at some time and changes linearly afterwards. We define a
unit-ramp function as
ramp(t) =
=
Z
t,
0,
t>0
t≤0
t
step(τ )dτ = t step(t)
(2)
−∞
The area of the rectangular in Fig. 3 is 0.5 (which is the
value of ramp(t) at t = 0.5).
5
−1.5
−1
−0.5
0
0.5
1
1.5
2
Figure 4: The unit-rectangle function.
1,
rect(t) = 21 ,
0,
|t| < 21
|t| = 12
|t| > 12
(3)
The unit-rectangle function is very convenient for describing the switching on, then switching off of a signal.
When rect(t) multiplies another function the result is zero
outside the nonzero range of rect(t) and is equal to the
other function inside the nonzero range of rect(t).
6
Unit-triangle function
1.5
f (t)
step(t + 0.5)
1
2
0.5
1.5
tri(t)
t
0
1
−0.5
0.5
step(t − 0.5)
−1
t
0
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Figure 5: The unit-rectangle function expressed in terms of step(t + 0.5) − step(t − 0.5).
We can think of the application of rect(t) as “opening of
a gate”, allowing other functions to go through, and then
closing the “gate”.
Note that (as i the case of ramp(t)) rect(t) can be expressed in terms of step(t).
−0.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Figure 6: The unit-triangle function.
tri(t) =
(
1 − |t|,
0,
|t| < 1
|t| ≥ 1
(5)
The unit-triangle function can be described as
rect(t) = step(t − t0) − step(t − t1),
(t0 < t1)
(4)
where, the notation step(t − t0) means that the unit-step
function is shifted with t0 time units. If t0 > 0, then the
shift would be a delay.
7
tri(t) = ramp(t + 1) − 2ramp(t) + ramp(t − 1),
or
tri(t) = (t + 1)step(t + 1) − 2t step(t) + (t − 1)step(t − 1)
8
Signum function
1.5
Unit-impulse
sgn(t)
1
δ(t + t3 )
0.5
δ(t − t1 )
Aδ(t − t2 )
1
1
1
A
t = t3
t=0
t = t1
t = t2
t
0
−0.5
Figure 8: Graphical representation of impulses. The number on the left side denotes the strength
of the impulse.
−1
−2
δ(t)
−1.5
−1
−0.5
0
0.5
1
1.5
An impulse is commonly “illustrated” as a vertical arrow,
with a number denoting its strength (see Fig. 8).
2
Figure 7: The signum function.
1,
sgn(t) = 0,
−1,
t>0
t=0
t<0
= 2step(t) − 1
(6)
In Fig. 8, the impulse δ(t − t1) is simply δ(t) delayed
with t1 time units. The impulse Aδ(t − t2) is simply δ(t)
delayed with t2 time units and scaled by a factor of A.
We discussed the unit-impulse δ(t) in Handout 7.
For nonzero arguments, the value of the signum function
has a magnitude of one and a sign that is the same as the
sign of its argument.
A Matlab implementation of step(t), ramp(t), rect(t),
and tri(t) is available on the course web-site in file sfunc.m.
In Matlab the signum function is called sign.m.
9
10
Unit-sinc function
Combinations of functions
We already demonstrated that for describing a given
function, we could use sums, differences, products of some
available functions (e.g. step(t)).
4
3
2
For example in order to describe the signal depicted in
Fig. 1 we used
sinc(t)
1
t
0
sin(t)step(t) − sin(t)step(t − 2) + sin(t)step(t − 3) =
sin(t) [step(t) − step(t − 2) + step(t − 3)]
−1
where, step(t) − step(t − 2) + step(t − 3) is depicted in
dashed green line in Fig. 1. Below is given the Matlab code
that generates the figure
t = -3:0.01:10;
y = sin(t);
−2
−3
−5
−4
−3
−2
−1
0
1
2
3
4
5
Figure 9: The unit-sinc function.
The unit-sinc function is related to the unit-rectangle
function (you will use it in your Digital Image Processing
course next year). It is the Fourier transform of the unitrectangle function. sinc(t) is called a unit function, because
its height and area are one. It is defined by
sinc(t) =
Note that sinc(0) = 1;
sin(πt)
πt
(7)
u1 = sfunc(t,1);
u2 = sfunc(t-2,1);
u3 = sfunc(t-3,1);
hold on;
plot(t,y.*(u1-u2+u3),’r’,’LineWidth’,3)
plot(t,y,’b--’)
plot(t,u1-u2+u3,’g--’)
axis([-3 10 -2 2]); grid on;
11
12
Amplitude scaling and shifting
Time scaling
3
5
2
−2g(2(t + 3.5))
)
g( t−3
2
g(t)
4
2g(t + 3.5)
1
3
t
0
g(t − 3)
g(t)
2
−1
1
t
0
−2
−3
−1
−4
−2
−5
−4
−3
−2
−1
0
1
2
3
4
5
−5
−4
−3
−2
−1
0
1
2
3
4
5
Figure 10: Amplitude scaling and time shifting of a signal.
Figure 11: Time scaling.
Scaling the amplitude of a signal g(t) by a constraint A
can be achieved by Ag(t).
Suppose we have an analog tape recording of some music.
When we play the tape in the usual way we hear the music
as performed but if we increase the speed of the tape movement across the sensing head we hear a speeded-up version
of the music. All the frequencies in the original recording
are now higher and the time of the performance is reduced.
If we slow down the tape the opposite effect occurs.
Time shifting of a signal g(t) with t0 time units can be
achieved by g(t − t0). For example let t = {0, 1, 2, 3, 4}
and f (t) = {5, 6, 7, 7, 8},
• f (t − 1) =? for t = 2, t = 5
• 2f (t − 2) =? for t = 4
13
14
Response of LTI system to different excitations.
From Handout 7 we know that if an impulse δ(t) is used
to excite a Linear Time-Invariant (LTI) system, the system’s response is called impulse response and we denoted
it by h(t). Recall the sifting property
h(t) = h(t) ∗ δ(t) =
Z
h(τ )
2
2
1.5
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
0
∞
−∞
Let us denote the response of an LTI system to a unitstep by hs(t)
hs(t) = h(t) ∗ step(t) =
=
=
∞
Z−∞
∞
Z−∞
t
h(τ )u(t − τ )dτ
h(τ )u(−(τ − t))dτ
τ
3
4
5
0
1
2
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
2
τ
3
τ
R2
0
2
1
2
4
5
0
1
2
3
4
5
4
5
h(t)
τ
3
Figure 12: Visualization of the convolution h(t) ∗ step(t) for t = 2. Note that in the lower-left
figure, the product h(t)step(−(τ − t)) is depicted with the dashed green line.
(8)
−∞
The effect of convolving h(t) with the unit-step function
is depicted in Fig. 12.
Equation (8) shows that the response of an LTI system
to step(t) is the integral of its impulse response.
Note that we can we can think of step(t) as the integral of
δ(t), hence if an excitation changes to its integral,
the response also changes to its integral.
15
2
1.5
0
h(τ )dτ
1
h(t)step(−(τ − t))
h(τ )δ(t − τ )dτ = h(t)
Z
step(τ − t)
We can also turn these relationships around and say that
since the first derivative is the “inverse” of integration, if
an excitation is changed to its derivative, the
response is also changed to its derivative.
Rt
Recall from equation (2) that ramp(t) = −∞ step(τ )dτ ,
hence the responseof an LTI system to ramp(t) is given by
R t R t
−∞
−∞ h(τ )dτ dτ .
16
References
[1] M. Roberts, “Fundamentals of Signals & Systems,” Mc
Graw Hill, 2008.
17