INTERDEPENDENCE, INFORMATION PROCESSING AND
advertisement

INTERDEPENDENCE, INFORMATION PROCESSING
AND ORGANIZATION DESIGN: AN EPISTEMIC PERSPECTIVE
Phanish Puranam
ppuranam@london.edu
London Business School
University of London
Marlo Goetting
mgoetting.phd2007@london.edu
London Business School
University of London
Thorbjorn Knudsen
tok@sam.sdu.dk
Strategic Organization Design Unit
University of S. Denmark
This Draft: Jan 13, 2010
Abstract1
We develop a novel analytical framework to study epistemic dependence: “who needs
to know what about whom” as a basis for understanding information processing requirements
in organizations, and the resulting implications for organization design. The framework we
develop helps to describe and compare the nature of the underlying coordination problems
generated by different patterns of interdependence, and the resulting knowledge requirements
for the design and implementation of appropriate organizational structures. The framework
offers a formal language that may prove useful for parsimoniously integrating what we know,
as well as for building new theory.
1
The authors thank Yang Fan, Mike Ryall, Mihaela Stan and Bart Vanneste for helpful comments on
earlier drafts. Puranam acknowledges funding from the European Research Council under Grant #
241132 for “The Foundations of Organization Design” project.
1. INTRODUCTION
An extensive literature treats the design and structure of organizations as a response to
the information processing needs generated by interdependence between its constituent
agents (e.g. Simon, 1945; March and Simon, 1958; Lawrence and Lorsch, 1967; Thompson,
1967; Van de Ven, Delbeq, Koenig, 1976; Galbraith, 1977; Tushman and Nadler, 1978;
Burton and Obel, 1984). The goal of this paper is to offer a novel analytical framework that
can potentially refine and elaborate on the foundational concept of “interdependence” in this
literature. Specifically, we develop an approach to systematically analyze the epistemic
implications of different patterns of interdependence. We explicitly describe the nature of the
underlying coordination problem (Schelling, 1960) generated by different patterns of
interdependence, and the resulting knowledge requirements for the design and
implementation of appropriate organizational structures.2 In doing so, we develop a formal
language that may prove useful for parsimoniously integrating what we know, as well as for
building new theory.
Interdependence is a concept that applies at multiple levels of analysis- between
individuals, groups and organizations- but always refers to a relationship between two
decision-making entities. Given two tasks undertaken by actors A and B, there is dependence
of A on B if A’s outcomes depend partly on the actions taken by B. Interdependence exists
when A’s outcomes depend on B’s actions and vice versa. This conceptualization is common
across widely varied literatures. It can be found implicitly in Thompson’s pioneering work on
2
Coordination failures occur when interacting individuals are unable to anticipate each other’s actions and
adjust their own accordingly (Schelling, 1960); in organizations, coordination failures are often manifested as
delay, mis-understanding, poor synchronization and ineffective communication. In contrast cooperation failures
occur when interdependent individuals are not motivated to achieve the optimal collective outcome because of
conflicting incentives. Coordination failures can occur quite independent of cooperation failures – even when
incentives are fully aligned (Simon, 1947; March and Simon, 1958; Schelling, 1960; Camerer, 2003; Heath and
Staudenmayer, 2000; Grant, 1996; Holmstrom and Roberts, 1998). Cooperation and coordination failures are
therefore individually sufficient reasons for the failure of collaboration.
2
interdependence between those executing related tasks (Thompson 1967), in the literature on
groups (Kelley and Thibault, 1978) and relationships between organizational units (Van de
Ven et al 1976). The same analytical idea also underlies formal models of complementarities
in production functions (Milgrom and Roberts 1990), and epistatic interactions in models of
organizational adaptation on fitness landscapes (Levinthal 1997), though in many
applications in these domains the focus is on interdependent tasks undertaken by a single
decision maker.
Interdependence is a natural foundational construct for analyzing organization design,
which involves two complementary problems- the division of labor and the integration of
effort (March and Simon, 1958; Lawrence and Lorsch, 1967; Burton and Obel, 1984).
Interdependence is the inevitable consequence of the division of labor as it arises between
those who carry out the divided labor. Consequently, much of the literature on formal
organization design rests on the premise that specific patterns of the division of labor give
rise to specific patterns of interdependence, and that efficient organizational forms “solve”
the problems of cooperation and coordination that arise when integrating the efforts of
interdependent actors (Simon, 1945; Thompson, 1967; Lawrence and Lorsch, 1967). For this
idea to have theoretical and empirical traction, the analysis of organization designs must build
on a clear understanding of why certain patterns of interdependence are harder to organize
around than others.
An influential set of answers to this question are rooted in the notion of bounded
rationality (Simon, 1945), with a focus on the costly information processing requirements
generated by interdependence. These are the costs of “communication and decision making”
(Thompson, 1967: 57) or the “gathering, interpreting and synthesis of information in the
3
context of organizational decision making” (Tushman and Nadler, 1978: 614)3. In this
perspective, distinct patterns of interdependence give rise to different information processing
requirements (Thompson, 1967), and “variations in organizing modes are actually variations
in the capacity of organizations to process information” (Galbraith, 1977: 79). Our approach
lies squarely within this perspective. Our key thesis is that different patterns of division of
labor generate corresponding patterns of interdependence, which in turn imply a particular
distribution of knowledge across actors that is necessary for them to achieve coordinated
action. Thus the nature of interdependence shapes epistemic dependence: “who needs to
know what about whom”. We claim that taking into account the epistemic consequences of
interdependence allows us to establish an improved mapping from types of interdependence
to types of organizational structures, which is the fundamental mapping on which most
descriptive as well as prescriptive principles of organization design in the information
processing perspective are based.
We acknowledge an important alternative tradition that focuses on the challenge of
aligning incentives to explain why certain patterns of interdependence are harder to organize
around. In this perspective, managing interdependence can be complicated when the initial
(pre-design) distribution of gains makes it unlikely that optimal actions will be taken - for
instance, because of gains from free riding, hold-up, or other forms of rent seeking behavior.
This approach to the analysis of interdependence characterizes the extensive literature on
social dilemmas (Kollock, 1998), reward interdependence within teams (Kelly and Thibault,
1978), principal-agent models with multiple agents (Holmstrom, 1982), and hold-up
problems in transaction cost economics as well as the property rights perspective
(Williamson, 1985; Grossman and Hart, 1986). These diverse accounts from social
3
The term “coordination costs” is also sometimes used to describe these costs. However, this is ambiguous as it
could refer either to the costs of the information processing necessary to generate coordinated action, or the
(opportunity) costs that arise when coordination failures occur.
4
psychology and economics have in common the notion that the central organizational design
problem involves using incentives (formal or informal) to change the distribution of gains
from managing interdependence in a manner that motivates optimal (if not efficient) actions.
While incentive structure does play an important part in this paper, we are largely
agnostic to the problem of the distribution of gains from managing interdependence, and
focus instead on the epistemic and information processing consequences of interdependence.
A fuller integration between the incentive and information perspectives is doubtless desirable,
but beyond the scope of this paper.
The rest of this paper is organized as follows: The next section discusses Thompson’s
highly influential conceptualization of interdependence and implications for information
processing and organization design (Thompson, 1967), and notes ambiguities within this
framework. We then develop a formal definition of epistemic dependence in section 3, and
discuss its application to deriving implications of any pattern of the division of labor, and the
consequent role of the organization designer in sections 4 and 5. In the discussion section we
show how our approach accommodates a number of traditional organization design topics,
and summarize our key contributions in the conclusion.
2. PRIOR CONCEPTUALIZATIONS OF THE LINKS BETWEEN
INTERDEPENDENCE & INFORMATION PROCESSING
An early conceptualization of the mapping from interdependence to information
processing requirements was presented by Thompson (1967). Thompson’s framework is still
the dominant one for studying interdependence as a basis for understanding organizational
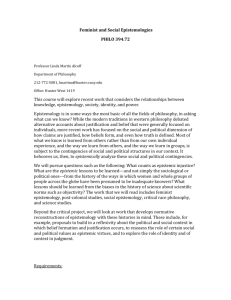
structures. Figure 1 provides some data on the number of papers published by year in five
important management journals (Strategic Management Journal, Administrative Science
Quarterly, Organization Science, Academy of Management Journal and Academy of
5
Management Review) that a) cite Thompson’s 1967 book b) contain the word
“interdependence” and c) the words “organization (al) structure (OR) design” as a fraction of
the number of papers that satisfied b) and c) alone. Given its wide usage and utility, we use
Thompson’s approach to the analysis of interdependence to briefly illustrate what we see as
distinctive about our approach.
---------------------------------Insert Figure 1 about here
----------------------------------
The central idea that arises from Thompson’s work on interdependence is that
complex forms of interdependence require high levels of costly information processing
activities such as decision making and communication (Galbraith, 1977; Tushman and
Nadler, 1978). In Thompson’s classic typology of interdependence complexity (1967),
interdependence is “pooled” when tasks depend on each other in a simple additive manner;
each task renders a discrete contribution to the whole, and each is supported by the whole.
Interdependence is “sequential” when the outputs of one task form the inputs of the other.
Finally, interdependence is “reciprocal” when the outputs of each task become the inputs of
the other.
Influential contributions by Galbraith, Tushman and Nadler elaborated on the
mapping from increasing interdependence complexity to increasing need for information
processing activities (Galbraith, 1973; Tushman and Nadler, 1978). We note that both
Galbraith’s and Tushman and Nadler’s analyses were clearly epistemic in spirit, because their
emphasis lay in outlining the conditions under which more or less knowledge was to be made
available to interdependent agents through information processing activities. In this respect,
our work directly builds on and extends their contributions. However, we also argue that
Thompson’s interdependence framework is a problematic basis on which to construct a
mapping from the nature of interdependence to the extent of information processing
6
necessary to manage it. Specifically, we see two important ways in which the framework is
underspecified, which result in ambiguities in its application.
First, Thompson’s framework does not distinguish between the logical sequence of
actions and their temporal sequence. Pooled interdependence involves a situation where each
action makes an independent contribution to the whole- no task provides an input to another.
However, this situation can accommodate variation in the timings of the actions themselves,
which may be sequential or simultaneous. Actions may be taken sequentially, even though
the results of the actions themselves are pooled to create a final output. As we will show, the
timing of actions has critical implications for the epistemic conditions that must hold for
actions to be coordinated. Furthermore, if the time it takes for tasks to be executed is greater
than zero, then a distinct category for “reciprocal interdependence” is unnecessary, as it can
be expressed as a repeated cycle of temporally sequential tasks.
Second, Thompson’s framework is silent about the role of incentives, and therefore
does not account for the entire class of interdependencies induced by incentive structures
(Kelley and Thibault, 1978; Wageman, 1995). It is worthwhile elaborating on this critique in
some detail to delimit its scope precisely: Thompson’s work, like much of the literature in
classical organization theory (and in contrast to much work in economics) focused on issues
of information and coordination rather than issues of incentive conflict. Our point is not to
point out that his approach privileges information over incentives; tractability is necessary for
theorizing, and indeed the converse critique could apply to the extensive literature that has
emphasized the incentive consequences of interdependence over coordination issues (also see
Dosi, Levinthal, and Marengo, 2003; Kretschmer and Puranam, 2008). Rather, our point is
that incentive structures themselves can critically impact the epistemic implications of
various patterns of interdependence. For instance, what is required to be known for
coordinated action by two individuals who are rewarded on joint output is not the same as
7
when they are rewarded on individual output. The complexities of managing the different
patterns of interdependence Thompson analyses could vary vastly as a function of the
incentive structure in place, and it is this missing “moderator” role of incentives that we point
to in this critique.
As will become clear from the next two sections, without knowing the nature of the
incentive structure – individual or joint rewards- and the sequence of actions – sequential or
simultaneous- it is difficult to give a precise specification of the underlying coordination
problem (also see Weber (2004) for an attempt to model each of Thompson’s
interdependence types as a distinct coordination game). Without knowing the nature of the
coordination problem associated with a particular pattern of interdependence, or a means to
compare these underlying coordination problems, it is in turn difficult to rank them in terms
of the need for information processing. Thus, the ambiguities in Thompson’s framework raise
doubts about the ordering of his interdependence categories in terms of the need for
information processing. The approach we introduce in the next two sections avoids these
ambiguities. We are able to specify the underlying coordination problems generated by any
pattern of division of labor, and also compare them in terms of the knowledge requirements
imposed on the relevant actors, using the concept of epistemic dependence.
3. DEFINING EPISTEMIC DEPENDENCE
To define epistemic dependence, consider a simple organization comprising multiple agents,
in which each agent i undertakes costly action a i and receives performance based
compensation. The agent’s utility is given by u i = π i (a i ,ψ i ) − ci (ai , ξ i ) , where ci is the
agent’s cost of action, π i is compensation, and ψ i and ξ i are vectors of exogenous
parameters. Total utility for all agents in the system is thus given by U = ∑ u i . The
8
functional form of the agent’s objective function is defined as oi = [π i (a i ,ψ i ) − ci (ai , ξ i ); Ω i ]
where Ω i represents any endogenous constraints faced by the agent as part of his objective
function. These could include internalized norms or habits of behavior, for instance.
Assumption 1: For total utility of the organization to be maximized, for every agent i
it is necessary that K i {oi }
The “knows that” operator K i {.} from modal (epistemic) logic can be read as “agent i knows
{.}”. This assumption makes explicit the notion that each agent is a decision maker (rather
than an automaton), who acts on the basis of her own objective function, which may include
constraints in the form of habits or norms for behavior in a particular context.
Assumption 2: For agent i to accurately predict agent j’s actions, it is necessary that
K i {o j }
The second assumption is not innocuous. It rules out, for instance, the use of a history of prior
observations that may enable an accurate prediction of another’s actions (or at least a history
that would be sufficient to generate an accurate prediction). It also rules out the existence of
signals that allow infallible predictions about actions. This leaves knowledge of the agents’
objective function as the only means by which an accurate prediction of that agent’s actions
can be made.
Definition: Given assumptions 1 & 2, if agent i maximizes his own utility only by
acting on the basis of an accurate prediction of agent j’s action, then i is
epistemically dependent on j.
We say there is epistemic dependence between agent i and j under these conditions because it
follows automatically that under assumptions 1 & 2 for total utility to be maximized, it is
necessary that K i , j {o j } - i.e. agent j’s objective function must be shared knowledge between
agent i and j. To see this, consider that for total utility to be maximized, agent j must know
9
her own objective function K j {o j } (Assumption 1). If i maximizes his own utility by acting
on the basis of an accurate prediction of j’s action then it is necessary that K i {o j }
(Assumption 2). Therefore for total utility to be maximized, it is necessary
that K i {o j } ∧ K j {o j } ≡ K i , j {o j } .
The notion of epistemic dependence helps to sharpen our discussion of coordination
problems in two important ways. First, we may say that whenever one agent’s utility is
maximized by acting on an accurate prediction of another agent’s actions, there is a
(potential) coordination problem.4 More generally, coordination problems in “real time”
settings (e.g. surgical teams, fire-fighters) as well as in “realistic time” settings (new product
development, strategic alliances) are fundamentally identical. Any setting in which actions
are unobservable- either because they are taking place simultaneously, because of
communication/information transmission constraints, or because of timing (it hasn’t
happened yet) – but must be predicted, can be modeled as a coordination problem.
Communication itself can be seen as a coordination problem, as indeed the modern view of
linguistics sees it: when communicating, I need to predict which among several possible
meanings you chose to attach to the word you use (eg. Clark, 1996).
A coordination failure thus is fundamentally a failure to predict the actions of another
in situations where such a prediction is essential for optimal action by oneself. It also follows
that whenever there is epistemic dependence, there must be a coordination problem, but the
converse is not true. For instance, the need to predict other’s actions in order to take one’s
own optimal actions may exist even in situations where Assumption 2 is not valid- where
norms, precedents conventions and signals exist to help make this prediction. Since there is
no epistemic dependence unless assumption 2 holds, it is clear that an interesting set of
4
Thus any game where at least one agent does not have a dominant strategy features a coordination problem.
10
questions arise about the circumstances under which prior history can serve as a basis for
predicting actions, or a system of signals can arise that makes such predictions possible.
However, we defer these issues for future work and focus on situations in which assumption
2 does hold.
Second, we note that there is bound to be a coordination failure if epistemic
dependence exists and the shared knowledge condition (i.e. the objective function of the
agent whose action is being predicted is known to itself as well as the predictor) is not met.
On the other hand, because the shared knowledge condition is necessary not sufficient, one
could also have a coordination failure when (given epistemic dependence) the shared
knowledge condition is met, but higher order shared knowledge is not present- common
knowledge may not exist (see Appendix A for a formal definition of shared knowledge of any
order).
For instance, consider the case of epistemic interdependence, which is a small
conceptual step from epistemic dependence: If agent i is epistemically dependent on agent j,
and agent j is epistemically dependent on agent i, then there is epistemic interdependence
between agents i and j. Therefore each must know whatever the other must know in order to
act- so that the objective function of each must be shared knowledge between them. However,
shared knowledge (of first order- both know it) may not be sufficient: unless both know that
both know, and both know that both know that both know (and so on), there may be residual
doubt in the mind of each agent about the action of the other. This residual doubt is in
principle fully eliminated only with shared knowledge of infinite order- which is common
knowledge. If we assume that residual doubt must disappear for coordinated action to take
place, then common knowledge is necessary; if some residual doubt is tolerable (because of
the relative costs of foregone coordination opportunities vis-à-vis failed attempts at
11
coordination), then only shared knowledge of finite order may be necessary. However, in
either case, shared knowledge of first order is always necessary.
4. THE DIVISION OF LABOR AND EPISTEMIC DEPENDENCE
Having defined epistemic dependence, we next provide a framework within which to
map different ways to divide labor to the resulting epistemic implications. To represent the
division of labor, we utilize the notion of a Task Architecture (denoted by A): a configuration
of tasks performed by agents who are measured and rewarded in certain ways. Task
Architectures capture the nature of the division of labor- which we define as the result of a
process of decomposing a single task performed by a single agent, into multiple tasks
performed by multiple agents. A task may be thought of as a production technology- it is a
transformation of inputs into outputs in a finite (non-zero) time period. The inputs are broadly
of two kinds: 1) actions taken by agents (always necessary- if there is no action as an input to
a task, only the output of a previous task, then the task is indistinguishable from the previous
task), and 2) the outputs of other tasks.5 In the basic formulation of our framework, each
agent is assigned a single task, though it is easy to relax this assumption.
The fundamental building block of a Task Architecture is the task dyad – a pair of
tasks i and j conducted by a pair of agents. More complicated structures are built through
scaling (e.g. from dyad to triad) delegation (hierarchical decomposition of tasks) and
recursion (e.g. a dyad in which each task is itself a dyad of tasks- see Appendix B).
4.1 Dimensions of Task Architecture
5
One may also consider Resources to be another kind of input. A Resource is an input that cannot itself be
viewed as the output of any other task within the Task Architecture being analysed.
12
Task architecture can be described along two basic dimensions, which capture the
nature of 1) task sequencing and 2) incentive breadth
1.
Task sequencing (S): This refers to the timing of actions by the agents. For
instance, in a dyad of tasks, the two agents may act sequentially (q) or
simultaneously (u).
Note that “simultaneous” need not actually mean
synchronized actions by the agents; as long as each did not know the
actions/outputs of the other agent when they acted, their actions are effectively
simultaneous. Conversely, sequential actions may not be restricted to only those
cases where the output of the first task is strictly necessary for the second task,
but more generally refers to the case of one agent acting only after the
action/output of the other agent has become visible.
2.
Incentive Breadth ( π ): In a dyad, narrow incentives correspond to individual
incentives, whereas broad incentives correspond to dyad level incentives (e.g.
Kretschmer and Puranam, 2008). More generally, the incentives for unit i (where
i may be an individual agent, group of agents, group of groups.. etc) are narrow if
performance is at the same level of aggregation as i, and broad if performance is
measured at the next higher level of aggregation.
To illustrate our notation for capturing the nature of a simple Task Architecture
comprising a single task dyad, we could write A :{ S (q ) | π 1 , π 2 } to denote sequential actions,
with narrow incentives for agent 1 and agent 2.
We take the perspective of a Designer who can make choices about one or both
dimensions of Task Architecture- sequencing and incentive breadth. As before, we assume
that the agent maximizes his utility given by u i = π i (a i ,ψ i ) − ci (ai , ξ i ) , subject to
constraint Ω i . The designer maximizes utility from the final output of the Task Architecture
13
net of incentive compensation paid out U d = Π A − ∑ π i . Total utility is thus given
by U = U d + ∑ U i .
In an analysis focusing on incentive considerations, we would now proceed to find the
optimal incentive structure a designer would set (as in standard principal agent models)
subject to some participation constraint for the agents; however, our goal is to explore the
epistemic requirements necessary to maximize total utility. In other words, we aim to specify
the distribution of knowledge across agents that would be necessary to enable maximization
of the sum of the agents’ and designer’s utilities, i.e. total utility. To do so, corresponding to
every Task Architecture A we show how to construct an Epistemic Structure- E which
captures “who needs to know what about whom” for total utility to be maximized. E thus
describes the necessary epistemic conditions for total utility to be maximized for a given A.
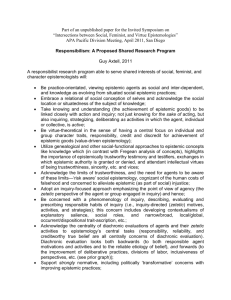
In all there are 4 (22) possible variants on task architecture for a single task dyad. The
corresponding epistemic structures are shown in Figure 2. A “1” in a cell indicates that the
column actor needs to know row knowledge element for total utility to be maximized. The
task architectures in which there is epistemic dependence between agents (i.e. off-diagonals
are non zero in the matrices in E) are those, by definition, in which one agent must act on the
basis of a prediction of the acts of another. This situation arises under the conjunction of two
conditions: a) whenever agent i faces broad incentives – where the returns to agent i’s actions
depend at least partly on j’s actions so that j’s actions feature as part of the vectors ψ i , ξ i and
b) when i is unaware of j’s action at the time of acting, which could be the case if i and j act
simultaneously, or i acts sequentially before j.
Consider the case where the two agents have broad incentives and act simultaneously. In
effect, both agents act before knowing the actions/outputs of the other, so that each is
epistemically dependent on the other. Therefore each must know whatever the other must
14
know in order to act- so that the objective function of each must be shared knowledge
between them. In contrast, consider the case of sequential action with broad incentives for (at
least) the first agent. There is an asymmetry that is immediately visible; the first mover needs
to know whatever the second mover needs to know in order to act but the converse is not
true.6 Here, there is only epistemic dependence but not epistemic interdependence.
Put simply, epistemic dependence between agents in an interdependent dyad arises
only when broad incentives are used; and given broad incentives, epistemic dependence is
greater for simultaneous than for sequential actions. In other dyadic task architectures, there
is no epistemic dependence between agents. In Appendix B, we show how epistemic
dependence can be represented for task architectures beyond the simple dyad.
---------------------------------Insert Figure 2 about here
----------------------------------
4.2 From Epistemic Structures (E) to Information Structures (It )
While the epistemic structures (E) gives the necessary knowledge conditions to maximize
total utility, in any given task architecture, the agents may not possess such knowledge. The
Information Structure (It) captures their actual state of knowledge at any point in time. The
Information Structure has exactly the same form as the matrix representing E. However, the
entries in the cells now capture the probability that the (column) agent knows the (row)
knowledge element.
4.3 The Information Processing Implications of Epistemic and Information Structures
6
Readers familiar with game theory will recognize the well known principle of “backward induction”
15
In order to compare Task Architectures in terms of the relative costliness of
information processing required to maximize total utility in each, we define a few useful
metrics on any E and It:
Epistemic Load (EL) of the task architecture, which is simply the number of all
positive elements in any E7. To the extent that memory is expensive, or every piece of
knowledge must be communicated to agents, EL is one way to capture the magnitude of
information processing costs in any task architecture.
Epistemic Dependence (ED) is measured as the sum of all off-diagonal elements in E.
The diagonal elements in E8 tell us whether the agent needs to know the relevant knowledge
item about himself, whereas off-diagonal elements tell us what agent i needs to know about
other agents in the system. If knowledge about an agent is typically private, and expensive to
communicate or be learnt by another agent, then ED is another measure of information
processing costs which focuses on the cost of communication among interdependent agents in
order to create sufficient epistemic conditions for coordinated activity. A visual
representation of ED also shows us the structure of the network linking agents who need to
communicate.
It is worth noting here that in our framework we presume that the division of labor
always involves some degree of specialization, i.e. that the tasks are qualitatively different in
a task architecture. However, this need not be so, as one can also see division of labour with
homogenous efforts (arising from individual effort constraints) – for instance a group of
workers trying to move furniture. The major difference in the case of division of labor
7
8
n
n
i =1
j =1
Formally, EL = ∑ ∑ δ eij , where δ takes on a value of 1 if eij is positive and 0 otherwise.
Formally, ED=EL-tr(E)
16
without specialization lies in the lower cost of generating shared knowledge to cope with
epistemic dependence. The nature of the information processing problem in the first case
(with specialization) compared to the latter (without specialization) is fundamentally different
– without specialization both agents hold the same general knowledge, in the case with
specialization, each agent has task specific knowledge. The cost of creating shared
knowledge about each other’s objective functions and constraints, when it is required to be
shared, should be higher with specialization than without. Thus we can expect that the
information processing costs for a given level of epistemic dependence are higher with
specialization than without.
Reliability ( ρ ) We can combine information from E and It to calculate the reliability
of any task architecture: first create a new square matrix from the element by element
multiplication of E and It and then multiply all the non-zero elements of the resulting matrix
together to yield a scalar in the range [0, 1]. Reliability captures the joint probability that all
agents know everything they need to for total utility to be maximized. Reliability as defined
here provides a precise way of assessing the extent of task uncertainty (Galbraith) - “the
difference between the information required to perform a task and the information already
possessed” (1973: 5).
Epistemic Load and Epistemic Dependence offer two precise ways in which we can
assess the de novo information processing costs of any task architecture. Epistemic Load
includes both the agent’s knowledge of own objective function and constraints as well as
Epistemic Dependence with other agents. If we assume that knowing one’s own objective
function and constraints is costless, then Epistemic Dependence may be a better measure of
information processing costs; else we may use the more comprehensive Epistemic Load
measure. In any case, EL= ED + the number of agents in the task architecture. However, both
these measures assume that agents have no prior knowledge. In contrast, Reliability, which
17
suggests a performance metric for any task architecture (given the epistemic and information
structures) may also be used to assess the extent of information processing necessary given
what the agents now. Put simply, the lower the reliability, the higher the information
processing costs required to ensure that It =E
5. THE ROLE OF THE DESIGNER
By analyzing task architectures in terms of epistemic dependence between agents, it is
also possible to conceptualize the role of a designer in epistemic terms. We assume that the
goal of the designer is to maximize reliability of the task architecture at minimal information
processing cost. Broadly, the designer can do this in two ways: first, by shaping the task
architecture in a manner that minimizes the epistemic burden on the agents; second, in
creating communication channels between agents who are epistemically dependent so that the
shared knowledge conditions are met through communication between agents. These
correspond closely to the classical distinction drawn between coordination through
programming and feedback in organizations (March and Simon, 1958). Our discussion below
shows the compatibility between the classic conceptualizations of coordination modes and
the notion of epistemic dependence, but also goes a step further: it points to the epistemic
conditions for the designer to be able to adopt either mode of coordination.
5.1. Design as Programming: Shaping task architecture
In this mode of coordination, the designer’s role consists of creating plans, schedules
and programs to enable integration of effort without the need for communication among
agents (March and Simon, 1958). According to March and Simon, “[t]he type of coordination
18
(...) used in the organization is a function of the extent to which the situation is standardized”,
and hence, “[t]he more stable and predictable the situation, the greater the reliance on
coordination by plan.” (1958: 182).
In epistemic terms, we may think of this role of the designer as involving the selection
of a task architecture A in a manner that minimizes the epistemic burden on the agents. We
know that epistemic dependence is lowest in task architectures characterized by narrow
incentives, followed by broad incentives with sequential actions, and highest in broad
incentive structures with simultaneous actions (see Figure 2). Therefore, we need to
understand under what conditions a designer can impose a narrow incentive structure or at
least sequence actions.
We argue that knowing what outputs to expect from each task and the logical
sequencing of tasks constitute a form of architectural knowledge (Henderson and Clark,
1990; von Hippel, 1990; Baldwin and Clark, 2000). This comprises knowledge about task
decomposition and task integration. Specifically, the designer must know the different tasks
and the order in which they must be performed for the final system level output to be
produced. Having architectural knowledge thus implies knowing what outputs to expect from
each task in the entire task architecture. Architectural knowledge is therefore required if the
designer wants to implement a narrow incentive structure or sequence actions. Conversely, in
the absence of architectural knowledge, the task architecture will admit broad incentives with
simultaneous sequencing of action only. This task architecture generates the highest level of
epistemic dependence between agents. Limited architectural knowledge thereby results in
coarser partitioning of sub-tasksThe key point here is that the architectural knowledge of the
designer helps to reduce epistemic dependence between agents.
Further, the designer can also influence the epistemic load of the agents in terms of
what they need to know about themselves, not only about others (i.e. epistemic dependence).
19
If the designers possess knowledge of the production technology used by the agents- the
knowledge required at the task level to convert actions (and inputs) to outputs, then the agents
need not know their own production technologies, because the designer can set incentives
based on actions rather than outputs. Thus, being paid on output implies a higher epistemic
requirement for the agent- who must know his own production technology. The corollary is
that if the agent’s incentive pay is based on his actions, then the agent need not know his own
production technology. The epistemic requirement is lowered because the agent’s objective
function becomes simpler. This is an important epistemic distinction between output vs.
behavior based contracts, and also points to the conditions under which a designer can
impose a high degree of formalization (i.e. action based contracts for agents) (Galbraith,
1973). Thus, whether programming takes the form of designing task architectures with
narrow incentives or action based incentives- which is after all what plans, schedules and
programs are- viewed from the epistemic perspective, its function is to exploit the knowledge
of the designer to minimize the epistemic burden on the agents.
An equally important insight is that designers with different levels of knowledge may
well choose different task architectures for the same set of tasks. For instance, consider a
task dyad assigned to the pair of agents {1,2} and {3,4}, each with its own designer, D1 and
D2. D1 may sequence the tasks simultaneously, while D2 may do so sequentially. We know
from Figure 2 that if both designers use narrow incentives, then in fact the two pairs of agents
have identical knowledge requirements. However, even if D1 used broad incentives, D2
could still plausibly use narrow incentives as long as he knows what to measure- in other
words, has the requisite architectural knowledge. Similarly, if {1,2} knew their production
technologies they could work to an output based measurement, while {3,4} who are ignorant
about the relevant production technology may be measured on their actions.
20
By explicitly allowing the Designer to modify A (task architecture) we are clearly
eschewing the strong form of technological determinism- where there is only one “true”
underlying task architecture. Indeed, with a bounded rational designer, it appears to us that at
least the strongest forms of technological determinism are impossible to sustain, as the
Designer’s choices about A can only reflect his understanding at a point in time. Different
Designers with different levels of knowledge may therefore enforce quite different A for the
same basic set of tasks. Conversely, with sufficient knowledge (almost) any task architecture
is feasible.9
5.2. Design as Feedback: Shaping Organizational Architecture
Programming is feasible only with high levels of architectural knowledge. If such
knowledge is not available to the designer, an alternative may be to let the agents
communicate among themselves in order to create the shared knowledge made necessary by
epistemic dependence. Even in this case, the designer must possess some level of
architectural knowledge- for instance, he must know who is epistemically dependent with
whom- but not enough to be able to appropriately redefine the epistemic structure. Instead,
the designer can make the knowledge specified in E available to agents by creating
appropriate channels for the agents to communicate directly with each other (enabling
feedback). According to March and Simon coordination by feedback becomes necessary “[t]o
the extent that contingencies arise, not anticipated in the schedule, (...) [which] requires
9
It is even possible to imagine adopting simultaneous scheduling for tasks that appear to have a logical
sequence to them (task 2 depends on the output of task 1 as an input, for instance). As long as both agents in the
dyad meet the knowledge requirements imposed by such a high level of epistemic dependence -the downstream
agent would literally have to predict the upstream agents output before it was delivered, and the upstream agent
would have to predict the ability of the downstream agent to do this etc.- the task architecture is still technically
feasible (consider, for instance attempts at concurrent engineering in software development). However, a caveat
here is that no physical good is necessary from upstream to downstream for downstream to start working- all
that is required is a prediction of what the output will be.
21
communication to give notice of deviations from planned or predicted conditions, or to give
instructions for changes in activity to adjust to these deviations.” (1958: 182) The marked
distinction between coordination by plans and coordination by feedback is that the former is
based on pre-established schedules, whereas the latter “involves transmission of new
information” (1958: 182).
In prior literature, grouping and linking have been considered as the two basic ways in
which communication between agents can be induced (Nadler and Tushman, 1997).
Grouping constitutes placing activities that need to be tightly coordinated within common
organizational boundaries; linking refers to the creation of channels of communication and
influence that link activities in different groupings. Grouping and linking jointly describe the
organizational architecture. Specifically, the grouping decision leads naturally to a
consideration of organization structure- as grouping results in sub-units within the
organization. 10
Coordinating interdependent activities through grouping therefore implies the
creation of an organizational architecture that eases communication between epistemically
dependent agents. The distinction between programming and feedback thus corresponds to an
important but often ignored distinction between task architecture and organizational
architectural. Put simply, designer’s shape organizational structures when they cannot shape
task architectures; the latter requires the designer to possess a higher level of architectural
knowledge.
6. DISCUSSION: IMPLICATIONS FOR ORGANIZATION DESIGN
10
Two assumptions are implicit in the discussion of grouping: a) communication is easier within rather than
between groups b) communication efficiency declines with group size. Both assumptions are necessary and
jointly sufficient to explain the presence of organizational sub-units.
22
We now show how the approach we have developed can be used to state more
precisely some well known ideas in the literature on interdependence, information processing
and organization design. Our coverage of topics cannot be exhaustive, but we will select
some examples with the idea of demonstrating the generative powers of the language we have
constructed. We limit ourselves to a discussion of the underlying theoretical mechanisms in
terms of the simple interdependent dyad – interested readers will find details of how to scale
up to arbitrarily large sized organizations with both vertical and horizontal differentiation in
Appendix B.
6.1. The Mapping Between Interdependence and Information Processing
The central purpose of this paper was to develop an improved mapping between
interdependence and the resulting need for information processing. In the task dyad, our
analysis makes clear that four task architectures are feasible (Figure 2). Further, the lowest
epistemic load (EL) and epistemic dependence (ED) occur with narrow incentives, while
maximum EL and ED occurs with broad incentives and simultaneous moves. The task
architecture with broad incentives and sequential moves is intermediate between these two
extreme cases. Thus in the absence of prior knowledge (i.e. It=0), this ordering also captures
the extent of information processing required. However, as our analysis makes clear, if the
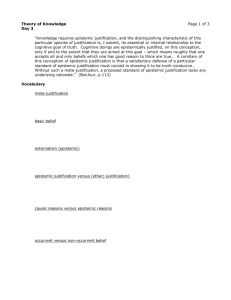
“blank slate” condition does not hold and It ∫0, then this ordering need not hold. To see, this
consider Figure 3 below, which shows epistemic structures E1-E3 as well as associated
information structures I1-I3 for three dyadic task architectures.
---------------------------------Insert Figure 3 about here
----------------------------------
It is obvious in Figure 3 that while EL(E1)>EL(E2)>EL(E3), it is also true that
ρ 1> ρ 2> ρ 3. If the agents in these task architectures all began from blank slate conditions
23
with no prior knowledge (I1=I2=I3=0), we would have no hesitation in saying that
information processing costs would be highest in the first case and lowest in the last.
However, if the information structures are as shown in the figure, then in fact information
processing costs (measured as a decreasing function of reliability) would be highest for the
last case and lowest in the first. Put simply the history of a task architecture, which in turn
may influence the current knowledge states of the agents (i.e. their information structures),
cannot be ignored in assessing its information processing implications.
How do our conclusions compare with received wisdom? We have already discussed
Thompson’s (1967) conceptualization of interdependence into pooled, sequential and
reciprocal categories extensively. In terms of our framework, Thompson’s rank ordering of
sequential interdependence as higher than pooled interdependence in terms of information
processing requirements can be justified only in special cases in our framework. If we assume
that pooled interdependence (“when tasks depend on each other in a simple additive manner;
each task renders a discrete contribution to the whole, and each is supported by the whole”
pp. 54, 64) is associated with a narrow incentive structure and simultaneous task scheduling,
whereas sequential interdependence implies broad incentives with sequential actions, then
Thompson’s ranking holds Unless measured in this way, we would expect to see little if any
empirical support for Thompson’s ordering in terms of information processing needs.
As we have noted, Thompson’s notion of reciprocal interdependence (“when the
outputs of each task become the inputs of the other” –p.55) is not logically definable at a
point in time (because time to perform a task cannot be zero). However, it might well capture
repeated instances of sequential task scheduling (i.e. task A feeds into task B, which then
feeds into task A, which then feeds into task B etc.). Yet if the nature of the interaction does
not change by period, then it is still not clear why this should necessarily generate higher
information processing needs than pooled or sequential interdependence. There is also a
24
second possibility- perhaps reciprocal interdependence points to the need for repeated
interaction because the agents lack knowledge of E or its elements. By interacting repeatedly,
they may build such knowledge through communication.
It is thus useful to look closely at cases of reciprocal interdependence to distinguish a)
a pair of sequential architecture tasks that reverse direction after every period, but in which
the relevant Epistemic Structures are fully known, from b) repeated interactions in a trial and
error learning process meant to overcome uncertainty or ignorance about E. If the latter case
applies, then this is better viewed as an organizational architecture meant to create feedback
(i.e. communication between agents) rather than as a form of task architecture. But in either
case, we would not expect strong evidence to support the idea that reciprocal interdependence
must generate higher information processing needs than the other two categories of
interdependence. More generally, in the absence of the blank slate condition (i.e. It=0), it is
hard to see why we should expect any evidence for the increasing information processing
costs of pooled, sequential, and reciprocal interdependence.
Van de Ven et al. (1976) extended Thompson’s framework by adding an additional
category of interdependence that they called “team”. In their own words: “Team work flow
refers to situations where the work is undertaken jointly by unit personnel who diagnose,
problem-solve and collaborate in order to complete the work. In team work flow, there is no
measurable temporal lapse in the flow of work between unit members, as there is in the
sequential and reciprocal cases; the work is acted upon jointly and simultaneously by unit
personnel at the same point in time.” (p. 325) The authors conceptualize this fourth category
to stand at the top of Thompson’s Guttman scale of task interdependence, requiring the most
complex (group) coordination mechanisms. Within our framework, it is easy to see that team
interdependence can be modeled as simultaneous scheduling with broad incentives. It would
then generate the highest values of epistemic load and dependence and would indeed describe
25
a situation with the highest possible information processing costs, provided the blank slate
assumption is met.
Adler (1995) explicitly considered differences in situations where the actors in a task
architecture begin from a relatively more or less knowledgeable state. Adler applied
Thompson’s concept of task interdependence without modification; however, he
distinguished between two types of uncertainty, namely the degree of fit novelty and the
degree of fit analyzability. “The fit novelty of a project can be defined as the number of
exceptions with respect to the organization’s experience of product/process fit problems.”
(1995: 157) On the other hand, “[f]it analyzability can be defined (following Perrow (1967))
as the difficulty of the search for an acceptable solution to a given fit problem..” (1995: 158).
Within our framework, these situations correspond to the absence of architectural knowledge
on the part of the designer and/or low reliability structures (fit novelty), and difficulties in
building the relevant knowledge (fit analyzability). Adler’s approach thus strongly aligns
with our own conclusions that information processing requirements must depend not only on
the nature of the task architecture (and resulting epistemic structure) but also existing
knowledge endowments of the actors involved. Empirical measures of interdependence are
likely to be useful only to the extent both these aspects are accounted for.
6.2 Span of Control, Delegation and the Depth of the Hierarchy
The epistemic perspective offers us a clear distinction between the role of design vs.
management: while the former involves manipulations to task architecture (programming) or
organizational architecture (feedback) in an effort to enhance reliability at minimal
information cost, the latter requires managing the exceptions that arise because of
inadequacies of design (Galbraith, 1973). This calls for a view of hierarchical supervision as
exception management rather than as simply telling the agents what to do. This is because if
26
the designer was sufficiently endowed with architectural knowledge to be able to simply
specify action based contracts (i.e. telling agents what to do) – then this is by definition
simply a form of coordination by programming. Whether the instructions on what to do are
delivered in written plans or periodic oral communication does not appear to us to be a
critical distinction. On the other hand, exception management by definition cannot be
conducted by plans or schedules (else they would not qualify as exceptions)- indicating this is
a distinct task for managers in addition to the task of designing. Of course, managers in an
organization may possess both design and exception management responsibilities for their
immediate subordinates or only the latter (also see Appendix B for how to model
centralization vs. delegation of design).
This role of managers in exception management provides a natural basis for limits to
the span of control (Galbraith, 1973).
Imperfect architectural knowledge should imply the
need for exception management, and the greater the number of subordinates, the greater the
efforts needed for exception management. If there is a finite limit to the exception
management capacity of a manager, then there is a finite span of control. This in turn
influences the need for delegation, as well as the number of hierarchical layers for any given
total size of the organization. Thus, we should expect that limited architectural knowledge
implies a limited span of control, resulting in greater delegation and deeper hierarchies.
Conversely, flatter organizations require a high level of architectural knowledge on the part
of designer. Thus, we should expect that combinations of limited architectural knowledge and
imperfect information structures should imply more need for managing exceptions and a
sharply limited span of control, resulting in greater delegation and deeper hierarchies.
Conversely, flatter organizations require superior architectural knowledge on the part of
designer or superior information structures for the agents.
27
6.3 Environmental Attributes and Information Processing
The attributes of the organization’s task environment- comprising the organization’s
consumers and users, suppliers, competitors, and regulatory groups- have also been argued to
have information processing implications for the organization (Galbraith, 1973). A fair
number of environmental characteristics relevant to a firm’s decision-making process have
been proposed and analyzed.
Environmental uncertainty, in much of the early information-processing literature
(Burns & Stalker, 1961; Lawrence & Lorsch, 1967; Galbraith, 1973, 1977) is argued to be a
primary driver of task uncertainty and consequently information processing. It is “caused by
high levels of technological and market change requiring the organization to innovate in
order to remain effective and competitive” (Donaldson, 2001: 22). Eisenhardt and Bourgeois
(1988) argue that in high-velocity environments, “changes in demand, competition and
technology are so rapid and discontinuous that information is often inaccurate, unavailable, or
obsolete.”(1988: 818). Equivocality, has been defined by Daft & Lengel as a “measure of the
organization’s ignorance of whether a variable exists in the space.” (1986: 567) and hostile
environments are characterized by Burton and Obel by “precarious settings, intense
competition, harsh, overwhelming business climates, and the relative lack of exploitable
opportunities.” (1998: 171).
Interestingly, the consequences of these various forms of environmental change can
ultimately be described in epistemic terms. As Burton and Obel clarify (1998: pp. 167-171),
the impact of environmental attributes can be traced through their impact on interdependence
within the organization. Thus, we can represent the impact of environmental attributes in
terms of an underlying epistemic and/or information structure. In other words, changes in the
environment may a) exogenously alter the epistemic structure and/or b) the agents’
information structure leading in either case to a need for more information processing.
28
An example will highlight this point: Given a task structure with high epistemic
interdependence (such as the one depicted in Figure 4a – with sequential tasks and broad
incentives).Reliability will be highest with the information structure depicted in Figure 4b.
However, the effect of environmental uncertainty, velocity, equivocality, and hostility is
effectively a reduction in the agents’ knowledge as it becomes outdated – and hence a
reduction in the structure’s reliability given that I (as depicted in Figure 4c) does not map as
closely onto E anymore. We can thus explain why in the presence of environmental
uncertainty leading to lowered probabilities of knowing what they need to know, task
architectures which minimize epistemic load will always have higher reliability.
However changes in environment may also alter the underlying epistemic structure. In
particular, if the change is in the direction of greater epistemic dependence, then the need for
information processing should also increase. Thus if the new epistemic structure is as shown
in Figure 4d (simultaneous tasks with broad incentives), then we should expect to see a
dramatic decrease in reliability as well as the need for substantial information processing.
---------------------------------Insert Figure 4 about here
----------------------------------
Thus, the epistemic perspective helps us to think of environmental changes as either
affecting epistemic structure in the direction of greater epistemic dependence (for instance,
by destroying the architectural knowledge of the designer), or weakening the information
structure while preserving the epistemic structure. Each kind of change would result in a
greater information processing requirements. It is therefore critical to parcel out these effects
in empirical research- otherwise conclusions can be severely misleading.
29
7. CONCLUSION
We have introduced an analytical framework that can help to refine our understanding
of the links between interdependence, information processing and organization design.
Specifically, building on the central concept of epistemic dependence, we show how it is
possible to describe differences in the underlying coordination problems associated with
different divisions of labor, and to compare the resulting implications for information
processing. Through a few applications, we hope to have also illustrated that our approach is
highly compatible with prior wisdom- but at the same time offers opportunities for
refinement and novel theorizing. We have touched upon several topics central to the study of
organization design such as coordination by plan vs. feedback, formalization, delegation,
span of control, the depth of the hierarchy, delegation, management of exceptions and
environmental uncertainty. However, we recognize that neither this list nor our coverage of
these topics is exhaustive. Rather the goal in this paper has been to demonstrate the promise
of a new approach to tackling these classic problems, through a few initial steps. We hope to
take many more.
30
FIGURE 1
Papers on Interdependence & Design citing Thompson
(1967)
120
Percentage
100
80
Percentage
60
40
20
19
67
19
70
19
74
19
77
19
80
19
83
19
86
19
89
19
92
19
95
19
98
20
01
20
04
20
07
0
Year
FIGURE 2
The Epistemic Structures for Four basic Task Architectures for a Task Dyad
incentive structure
simultaneous
K{oA1}
K{oA2}
incentive structure
sequential
K{oA1}
K{oA2}
π1, 2
π1, π2
A1
1
0
A2
0
1
A1
1
1
π1, 2
π1, π2
A1
1
0
A2
1
1
A2
0
1
A1
1
1
A2
0
1
31
FIGURE 3
Comparing Information Processing Costs across Epistemic and Information Structures
E1
E2
E3
A1
A2
A1
A2
A1
A2
1
1
1
1
1
1
0
1
1
0
0
1
A1
A2
A1
A2
A1
A2
1
0.9
0.9
1
1
0.7
0
1
0.5
0
0
0.5
I1
I2
I3
FIGURE 4
Example of the effects of the Environmental Uncertainty on E and on I
incentive structure
E
K:{oA1}
K:{oA2}
Figure 4a
π1, 2
A1 A2
1
1
1
1
I
A1
1
1
I
A2
1
1
Figure 4b
A2
0
0
E: π1,2
A1
A2
1
1
1
1
Figure 4c
Figure 4d
A1
1
0
32
APPENDIX A: SHARED KNOWLEDGE
We present a formal definition of shared knowledge using standard notation from epistemic
(modal) logic. K1j denotes that Agent 1 knows j
Shared knowledge of first order
j is shared knowledge (of first order- which is implied if not otherwise specified) among the j
agents of a group G if
K1j ⁄ K2j ⁄ K3j ….⁄ Kjj
This is written as E1Gj and read “Everyone in group G knows j”
Shared knowledge of any order
By abbreviating EGEGn-1j = EGnj, and defining EG0j=j, we can define shared knowledge of
j to any order n with the axiom:
∧ in=1 E nϕ
Common knowledge is shared knowledge of order n =∝
Cϕ = ∧ in=1 E nϕ where n =∝ .
APPENDIX B: FROM TASK DYADS TO COMPLEX ORGANIZATIONS
Here we show how epistemic dependence can be represented for task architectures
beyond the simple dyad. More complex structures are built through scaling (e.g. from dyad to
n-task structures), delegation (managers at each level design task architectures for their subordinates) and recursion (e.g. a dyad in which each task is itself a dyad of tasks).
1. Simple scaling from task dyads to n-task structures
The general n-task versions of the four basic epistemic structures in any task dyad are shown
in Figure B1. Recall that a “1” in a cell indicates that the column actor needs to know row
knowledge element for total utility to be maximized. When an agent i must act on the basis of
predictions about the acts of any other agent j, there is epistemic dependence between agents.
These cases appear as entries with non zero off-diagonals.
2. Building nested, hierarchical n-task structures
The epistemic structures shown in Figure B1 are quite simple in that they describe a flat
structure with a designer and a single layer of agents below him – there are no organizational
subdivisions so that all agents are housed in a single department. The next step is to consider
ways in which multiple hierarchical levels and horizontal subdivisions can be captured in our
formalism. It turns out that we can proceed to build up such complex structures in two very
different ways, either by delegation or centralization of organization design. Note that in
33
either case, the task of managing exceptions as they occur may still be delegated to subordinates.
FIGURE B1
n-Task Versions of the Basic Epistemic Structures
incentive structure
simultaneous
K{oA1}
K{oA2}
...
K{oAn}
incentive structure
sequential
K{oA1}
K{oA2}
...
K{oAn}
A1
1
0
...
0
π1,π2
A2
...
0
...
1
...
...
...
0
...
An
0
0
...
1
A1
1
0
...
0
π1,π2
A2
...
0
...
1
...
...
...
0
...
An
0
0
...
1
A1
1
1
...
1
π1,2
A2
...
1
...
1
...
...
...
1
...
An
1
1
...
1
A1
1
1
...
1
π1,2
A2
...
0
...
1
...
...
...
1
...
An
0
0
...
1
2.1 Delegation of design.
In this approach, we assume “design is always one level deep”. The agents below the
designer could themselves be middle managers who design for their subordinates and so on,
giving rise to a hierarchy. Assume there are m middle managers, each responsible for a
subgroup including one or more subordinates. Each middle manager is responsible for
designing the task architecture for her own group, in addition to managing exceptions that
arise because of inadequate design for their respective subunits. This has several
implications:
a) Only the responsible middle manager has detailed architectural knowledge and
awareness of the epistemic conditions within her own unit.
b) There is implicitly a design cycle and a production cycle. For instance in a three level
organization, the organizational designer (typically the CEO), designs the incentive
structure for middle managers. The middle manager’s action is based on these
contracts. The middle manager in turn designs the incentive structure for the
subordinates. The subordinates then complete their production cycle after which the
middle managers complete theirs. Thus, we assume alternating cycles of design and
production that have to move in serial from the bottom up, one layer in each time
interval.
c) Epistemic dependence occurs only within sub-groups, not between members in
different sub-groups. The sub-groups are essentially modular units with high
epistemic dependence within but not between them (Simon, 1962). Every sub-unit
must have a middle manager-who aggregates the output of his subordinates- and these
34
managers may indeed be epistemically interdependent- but in general, individuals in
one group are not interdependent with individuals in other groups.
We show a simple example in Figure B2. In the structure depicted in Figure B2, the designer
D delegates the design task for the lowest level of the hierarchy to middle managers M1 and
M2. Thus, the designer only needs to know architectural knowledge necessary to define the
incentives for M1 and M2 and the middle managers, in turn, need to possess architectural
knowledge relevant to the sub-ordinates they directly oversee; in addition, given that M1
moves sequentially before M2, she also needs to know M2’s output function. A possible
resulting Epistemic structure is shown in Figure B3.
FIGURE B2
A Simple Hierarchy with one Layer of Middle Managers
FIGURE B3
The Corresponding Epistemic Structure E to A in Figure B2
K{oD}
K{oM1}
K{oM2}
K{oS1}
K{oS2}
K{oS3}
K{oS4}
K{oS5}
K{oS6}
K{oS7}
K{oS8}
M1
0
1
1
1
1
1
1
0
0
0
0
M2
0
0
1
0
0
0
0
1
1
1
1
S1
0
0
0
1
1
1
1
0
0
0
0
S2
0
0
0
1
1
1
1
0
0
0
0
S3
0
0
0
1
1
1
1
0
0
0
0
S4
0
0
0
1
1
1
1
0
0
0
0
S5
0
0
0
0
0
0
0
1
0
0
0
S6
0
0
0
0
0
0
0
0
1
0
0
S7
0
0
0
0
0
0
0
0
0
1
1
S8
0
0
0
0
0
0
0
0
0
1
1
2.2 Centralization of design.
Centralization of design is the natural contrast to delegation of design. This approach assumes
that a central designer (e.g. CEO) designs the entire organization so that each subunit is selfmanaged. In this case middle managers exist primarily to manage exceptions that arise within
their sub-units. The only reason for layers of organization to exist in this case is task
35
sequencing. There are layers in the organization only to the extent that certain tasks must
occur before others- there is therefore a “hierarchy of timing”.
The formal characterization of the central design model is somewhat more involved than the
delegation model because interdependencies across units influence every subordinate. Our
aim is to formally specify the epistemic structure required to achieve coordination in any
activity system comprising m groups of n members each. Epistemic structures are represented
as before, and we use the general n-member versions of the basic epistemic structures that are
shown in the above Figure B1.
Building blocks
It is useful to express the general n-member versions of the basic epistemic structures in
matrix form. The three distinct epistemic structures shown in Figure B1 are shown in matrix
form below, i.e. matrices I, L and J. The 0 and H matrices are helpers that allow us to use
recursive expansion and thereby model organizations that vary in horizontal span and number
of hierarchical layers.
1 0 L 0
0 1L 0
In =
M M O M
0 0 L 1
1 0 L 0
1 1L 0
Ln =
M M O M
1 1L 1
0 0 L 0
0 0 L 0
0n =
M MO M
0 0 L 0
1 1 L 1
1 1L 1
Jn =
M M O M
1 1L 1
0 1L 1
1 0 L 1
Hn =
M M O M
1 1L 0
The general case defines an epistemic structure E composed of block matrices that each
represents a distinct epistemic category. Coordination between m groups is regulated by
matrices Bm, where Bm stand for any m × m matrix that can be made from the building blocks
presented above. Coordination within subunits with n members is regulated by two matrices
Wn, where Wn stand for any n × n matrix, including those that can be made from the
building blocks presented above. Coordination within groups with arbitrary structures
represented by Bm and Wn requires the following epistemic condition:
([ Bm ][ H m ]) ⊗ J n + I m ⊗ Wn
E =
([ Bm ][ H m ]) ⊗ J n + I m ⊗ Wn
This formalism extracts the overall epistemic matrix E for m groups that each employ n
agents. The method used here is matrix expansion by tensor product. The advantage of this
method is that there are virtually no restrictions on the specification of the two required input
matrices:
1. A matrix Bm defining the epistemic structure among m groups.
36
2. A matrix Wn defining the epistemic structure among the n agents that are employed in
each of the m groups.
The number of agents n can vary across groups and there is no restriction on the size of m and
n. In addition to the two required inputs, there are three “helpers”, the matrices Im (m × m
identity matrix), Hm (m × m identity matrix with zeros on the diagonal), and Jn (n × n unit
matrix). The helper matrices allow us to decompose the formal representation into two
meaningful additive components. Each component is a matrix expansion by tensor product.
The first tensor product represents coordination between groups and the second represents
coordination within. As previously mentioned, square brackets denote element-by-element
multiplication. This operation eliminates self-referential interdependencies in Bm (betweengroup interdependence).
A simple example illustrates the formalism. Suppose there are two subunits and the
epistemic structure between the two units, B2, is defined in terms of the basic task
architecture I2 (narrow incentives). Further suppose that there are three members in each
group and that the epistemic structure within the unit, W3, is defined in terms of the basic
task architecture J3 (simultaneous actions and broad incentives). We then get:
E = ([ B 2 ][ H 2 ]) ⊗ J 3 + I 2 ⊗ W3 = ([ I 2 ][ H 2 ]) ⊗ J 3 + I 2 ⊗ J 3
The resulting Epistemic structure is shown in Figure B4.
FIGURE B4
Example of a Nested Task Structure: Two groups with three agents each
A1
K{oA1}
K{oA2}
K{oA3}
K{oA4}
K{oA5}
K{oA6}
A2
1
1
1
0
0
0
A3
1
1
1
0
0
0
A4
1
1
1
0
0
0
A5
0
0
0
1
1
1
A6
0
0
0
1
1
1
0
0
0
1
1
1
Recursive expansion
Multilevel systems can be generated by recursively expanding Wn while defining Bm at each
recursive pass. This scheme is quite flexible because the number of groups, m, can be varied
for each pass in the recursion (the number of agents, n, is defined from the expanding matrix
Wn). A new epistemic structure Wn can even be applied in each recursive pass. Our recursive
algorithm allows us to generate any epistemic structure E, given an initial definition of m, n,
Bm and Wn as well as proper definitions of m and Bm for each subsequent pass in the
recursion.
37
REFERENCES
Adler, P. S. 1995. Interdepartmental Interdependence and Coordination: The Case of the
Design/Manufacturing Interface. Organization Science, 6(2): 147 - 167.
Baldwin, C. Y., & Clark, K. B. 2000. Design Rules. Cambridge, MA: The MIT Press.
Burns, T., & Stalker, G. M. 1961. The Management of Innovation. London: Tavistock.
Burton, R. M., & Obel, B. 1998. with contributions by S.D. Hunter III., M. Sondergaard, and
D. Dojbak. Strategic Organizational Diagnosis and Design: Developing Theory for
Application (2nd ed.). Boston/Dordrecht/London: Kluwer Academic Publishers.
Burton, R. M., & Obel, B. 1984. Designing Efficient Orgnaizations: Modelling and
Experimentation: North-Holland.
Camerer, C. 2003. Behavioural Game Theory: Experiments in Strategic Interaction. Press:
Princeton University Press.
Clark, H. 1996. Using Language. Cambridge, UK: Cambridge University Press.
Daft, R. L., & Lengel, R. H. 1986. Organizational Information Requirements, Media
Richness and Structural Design. Management Science, 32(5): 554-572.
Donaldson, L. 2001. The Contingency Theory of Organizations. Thousand Oaks, CA: Sage
Dosi, G., Levinthal, D. A., & Marengo, L. 2003. Bridging contested terrain: linking
incentive-based and learning perspectives on organizational evolution. Industrial and
Corporate Change, 12(2): 413-436.
Eisenhardt, K. M., & Bourgeois III, L. J. 1988. Politics of Strategic Decision Making in
High-Velocity Environments: Toward a Midrange Theory. Academy of Management
Galbraith, J. R. 1973. Designing Complex Organizations. Reading, MA: Addison-Wesley.
Galbraith, J. R. 1977. Organizational Design. Reading, Mass.: Addison-Wesley.
Grant, R. M. 1996. Toward a knowledge based theory of the firm. Strategic Management
Journal,, 17: 109-122.
Heath, C., & Staudenmayer, N. 2000. Coordination Neglect: How Lay theories of organizing
complicate coordination in organizations. Research in Organizational Behavior,,
22(53-191.).
Henderson, R. M., & Clark, K. B. 1990. Architectural innovation: The reconfiguration of
existing product technologies and the failure of established firms. Administrative
Science Quarterly,, 35(9-30.).
Holmstrom, B. 1982. Moral hazard in teams. Bell Journal of Economics, 13(2): 324-340.
Holmstrom, B., & Roberts, J. 1998. The Boundaries of the Firm Revisited. Journal of
Economic Perspectives, 12(4): 73.
Kelley, H. H., & Thibaut, J. W. 1978. Interpersonal Relations: A Theory of
Interdependence: John Wiley & Son.
Kollock, P. 1998. Social Dilemmas: The Anatomy of Cooperation. Annual Review of
Sociology, 24(1): 183.
Kretschmer, T., & Puranam, P. 2008. Integration through Incentives in Differentiated
Organizations. Organization Science., 19(6): 860-875.
Levinthal, D. A. (1997). "Adaptation on rugged landscapes." Management Science 43(7):
934.
38
Lawrence, P. R., & Lorsch, J. W. 1967. Organization and Environment: Managing
Differentiation and Integration. Boston: Harvard Graduate School of Business
Administration.
March, J. G., & Simon, H. A. 1958. Organizations: Wiley.
Milgrom, P. and J. Roberts 1990. The economics of modern manufacturing: Technology,
strategy, and organization." American Economic Review 80(3): 511-28.
Nadler, D. A., & Tushman, M. L. 1997. Competing by Design: The Power of
Organizational Structure: Oxford University Press.
Schelling, T. 1960. The Strategy of Conflict. Cambridge, MA: Harvard University Press.
Simon, H. A. 1945. Administrative behaviour. NY: Macmillan Press.
Simon, H. A. 1957. Administrative Behavior (2nd ed.): Macmillan.
Thompson, J. D. 1967. Organizations in Action. New York: McGraw-Hill.
Tushman, M. L., & Nadler, D. A. 1978. Information Processing as an Integrating Concept in
Organizational Design. Academy of Management Review, 3(3): 613-624.
Van de Ven, A., Delbeq, A., & Jr., K. R. 1976. Determinants of Coordination Modes within
Organizations. American Sociological Review, 41(2): 322-338.
Von Hippel, E. 1990. Task Partitioning: An Innovation Process Variable. Research Policy
19: 407-418.
Wageman, R. 1995. Interdependence and Group Effectiveness. Administrative Science
Quarterly, 40(1): 145 - 180.
Weber, R. 2004. Organizational Coordination: A Game-Theoretic View. Carnegie Mellon
University, Working Paper.
Williamson, O. E. 1975. Markets and hierarchies: Analysis and antitrust implications. New
York: Free Press.
39