Review of DSP Fundamentals
advertisement

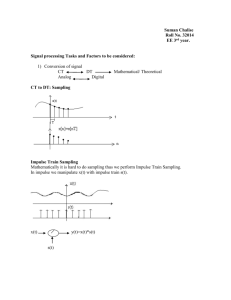
What is DSP?
Input
Signal
Digital Speech Processing—
Lecture 2
Analog-toDigital
Conversion
Computer
Output
Signal
Digital-toAnalog
Conversion
Digital
• Method to represent a quantity, a phenomenon or an event
• Why digital?
Signal
• What is a signal?
Review of DSP
Fundamentals
– something (e.g., a sound, gesture, or object) that carries information
– a detectable physical quantity (e.g., a voltage, current, or magnetic field strength) by
which messages or information can be transmitted
• What are we interested in, particularly when the signal is speech?
Processing
• What kind of processing do we need and encounter almost
everyday?
• Special effects?
1
Common Forms of Computing
2
Advantages of Digital Representations
• Text processing – handling of text, tables, basic
arithmetic and logic operations (i.e., calculator
functions)
–
–
–
–
Input
Signal
Word processing
Language processing
Spreadsheet processing
Presentation processing
• Signal Processing – a more general form of
information processing, including handling of speech,
audio, image, video, etc.
– Filtering/spectral analysis
– Analysis, recognition, synthesis and coding of real world signals
– Detection and estimation of signals in the presence of noise or
interference
A-to-D
Converter
Signal
Processor
D-to-A
Converter
Output
Signal
• Permanence and robustness of signal representations; zerodistortion reproduction may be achievable
• Advanced IC technology works well for digital systems
• Virtually infinite flexibility with digital systems
– Multi-functionality
– Multi-input/multi-output
• Indispensable in telecommunications which is virtually all digital
at the present time
3
Digital Processing of Analog Signals
xc(t)
A-to-D
x[n]
Computer
y[n]
D-to-A
yc(t)
4
Discrete-Time Signals
A sequence of numbers
Mathematical representation:
x = {x[n ]}, − ∞ < n < ∞
Sampled from an analog signal, xa (t ), at time t = nT ,
• A-to-D conversion: bandwidth control, sampling and
quantization
• Computational processing: implemented on computers or
ASICs with finite-precision arithmetic
– basic numerical processing: add, subtract, multiply
(scaling, amplification, attenuation), mute, …
– algorithmic numerical processing: convolution or linear
filtering, non-linear filtering (e.g., median filtering), difference
equations, DFT, inverse filtering, MAX/MIN, …
• D-to-A conversion: re-quantification* and filtering (or
interpolation) for reconstruction
x[n ] = xa (nT ),
−∞ < n < ∞
T is called the sampling period, and its reciprocal,
FS = 1/ T , is called the sampling frequency
FS = 8000 Hz ↔ T = 1/ 8000 = 125 μ sec
FS = 10000 Hz ↔ T = 1/10000 = 100 μ sec
FS = 16000 Hz ↔ T = 1/16000 = 62.5 μ sec
FS = 20000 Hz ↔ T = 1/ 20000 = 50 μ sec
5
6
1
Varying Sampling Rates
Speech Waveform Display
plot( );
Fs=8000 Hz
Fs=6000 Hz
stem( );
Fs=10000 Hz
7
8
Quantization
Varying Sampling Rates
x[ n] can be quantized to one of a finite set of values which is
then represented digitally in bits, hence a truly digital signal; the
course material mostly deals with discrete-time signals
(discrete-value only when noted).
Fs=8000 Hz
out
Fs=6000 Hz
7
2.4
6
1.8
5
1.2
4
0.6
3
Fs=10000 Hz
• Transforming a continuouslyvalued input into a
representation that assumes
one out of a finite set of values
0.3 0.9 1.5 2.1
2
1
in
• The finite set of output values
is indexed; e.g., the value 1.8
has an index of 6, or (110)2 in
binary representation
• Storage or transmission uses
binary representation; a
quantization table is needed
0
9
Quantization:
A 3-bit uniform quantizer
Discrete Signals
Sinewave Spectrum
6
sample
2
y
quantize
Sampled
Sinusoid
5sin(2πnT)
4
0
6
4
-6
2
0
5
10
15
20
25
30
35
40
n
y
0
-2
6
-4
4
-6
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0
-2
Quantized
sinusoid
round[5sin(2πx)]
2
0
Discrete
sinusoid
round[5sin(2πnT)]
4
-4
-4
-6
1
x
y
y
2
6
-2
Analog
sinusoid,
5sin(2πx)
0
5
10
15
20
25
30
35
40
n
0
-2
quantize
sample
-4
-6
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
SNR is a function of B, the number of bits in the quantizer
1
x
11
12
2
The Sampling Theorem
Issues with Discrete Signals
Sampled 1000 Hz and 7000 Hz Cosine Waves; Fs = 8000 Hz
• what sampling rate is appropriate
– 6.4 kHz (telephone bandwidth), 8 kHz (extended
telephone BW), 10 kHz (extended bandwidth), 16 kHz
(hi-fi speech)
• how many quantization levels are necessary at
each bit rate (bits/sample)
amplitude
1
0.5
0
-0.5
-1
0
– 16, 12, 8, … => ultimately determines the S/N ratio of
the speech
– speech coding is concerned with answering this
question in an optimal manner
0.2
0.4
0.6
time in ms
0.8
1
1.2
• A bandlimited signal can be reconstructed exactly
from samples taken with sampling frequency
1
= Fs ≥ 2fmax
T
or
2π
= ωs ≥ 2ωmax
T
13
Discrete-Time (DT) Signals are Sequences
Demo Examples
1.
2.
3.
5 kHz analog bandwidth — sampled at 10, 5,
2.5, 1.25 kHz (notice the aliasing that arises when
the sampling rate is below 10 kHz)
quantization to various levels — 12,9,4,2, and 1
bit quantization (notice the distortion introduced
when the number of bits is too low)
music quantization — 16 bit audio quantized to
various levels:
Maple Rag: 16 bits, 12 bits,
10 bits, 8 bits,
14
T
•
•
15
6 bits, 4 bits;
x[n] denotes the “sequence value at ‘time’ n”
Sources of sequences:
– Sampling a continuous-time signal
x[n] = xc(nT) = xc(t)|t=nT
– Mathematical formulas – generative system
e.g., x[n] = 0.3 • x[n-1] -1; x[0] = 40
16
Noise: 10 12 bits
Impulse Representation of Sequences
x[ n ] =
A sequence,
a function
∞
∑
Value of the
function at k
x[k ]δ [n − k ]
k =−∞
a−3δ [n + 3]
a2δ [n − 2]
Some Useful Sequences
⎧1, n = 0
⎩0, n ≠ 0
unit sample δ [n] = ⎨
real
exponential
x[n] = α n
a1δ [n − 1]
a7δ [n − 7]
x[n ] = a−3δ [n + 3] + a1δ [n − 1] + a2δ [n − 2] + a7δ [n − 7]
17
⎧1, n ≥ 0
unit step u[n] = ⎨
⎩0, n < 0
sine wave x[n] = A cos(ω 0 n + φ )
18
3
Complex Signal
Variants on Discrete-Time Step Function
u[n]
x[n ] = (0.65 + 0.5 j )n u[n ]
u[n-n0]
u[n0-n]
n → −n ⇔ signal flips around 0
19
20
Complex Signal
Complex DT Sinusoid
x [n ] = A e jω n
x [n ] = (α + j β )n u[n ] = (re jθ )n u[n ]
• Frequency ω is in radians (per sample), or just
radians
r = α2 + β2
θ = tan−1( β / α )
β
– once sampled, x[n] is a sequence that relates to
time only through the sampling period T
r
θ
• Important property: periodic in ω with period 2π:
j ( ω 0 + 2 π r )n
jω 0n
α
x [n ] = r e
n
jθ n
u [n ]
Ae
n
r is a dying exponential
= Ae
– Only unique frequencies are 0 to 2π (or –π to +π)
– Same applies to real sinusoids
e jθ n is a linear phase term
22
21
Sampled Speech Waveform
Signal Processing
xa(t)
MATLAB: plot
MATLAB: stem
• Transform digital signal into more desirable
form
x[n]
xa(nT),x(n)
x[n]
y[n]=T[x[n]]
single input—single output
x[n]
y[n]
single input—multiple output,
e.g., filter bank analysis,
sinusoidal sum analysis, etc.
T=0.125 msec, fS=8 kHz
Trap #1: loss of sampling time index 23
24
4
LTI Discrete-Time Systems
x[n]
Example:
y[n]
LTI
System
δ [n]
LTI Discrete-Time Systems
Is system y [n ] = x[n ] + 2 x[n + 1] + 3 linear?
h[n]
x1[n ] ↔ y1[n ] = x1[n ] + 2 x1[n + 1] + 3
x2 [n ] ↔ y 2 [n ] = x2 [n ] + 2 x2 [n + 1] + 3
• Linearity (superposition):
x1[n ] + x2 [n ] ↔ y 3 [n ] = x1[n ] + x2 [n ] + 2 x1[n + 1] + 2x2 [n + 1] + 3
Τ{ax1[n] + bx2 [n]} = aΤ{x1[n]} + bΤ {x2 [n]}
≠ y1[n ] + y 2 [n ] ⇒ Not a linear system!
Is system y [n] = x[n ] + 2 x[n + 1] + 3 time/shift invariant?
• Time-Invariance (shift-invariance):
x1[n] = x[n − nd ] ⇒ y1[n] = y[n − nd ]
y [n ] = x[n ] + 2x [n + 1] + 3
y [n − n0 ] = x [n − n0 ] + 2 x [n − n0 + 1] + 3 ⇒ System is time invariant!
Is system y [n ] = x [n ] + 2 x [n + 1] + 3 causal?
• LTI implies discrete convolution:
∞
y [n ] depends on x[n + 1], a sample in the future
y[n] = ∑ x[k]h[n − k] = x[n]∗ h[n] = h[n]∗ x[n]
k =−∞
25
h[n]
Convolution Example
⎧1
x[n] = ⎨
⎩0
0≤n≤3
otherwise
⎧1
h[n ] = ⎨
⎩0
0≤n≤3
otherwise
26
⇒ System is not causal!
x[n]
n
01234 5
x[n],h[n]
n=0
01234 5
n=1
n
n=2
What is y [n ] for this system?
Solution :
01234 5
n
01234 5
∞
∑ h[m] x[n − m]
y [n ] = x [n ] * h[n ] =
m
01234 5
m
n=4
n=3
01234 5
m
n=5
m =−∞
⎧ n
⎪ ∑ 1⋅ 1 = (n + 1)
⎪ m =0
⎪ 3
= ⎨ ∑ 1⋅ 1 = (7 − n )
⎪ m = n −3
⎪0
⎪
⎩
0≤n≤3
y[n]
01234 5
4≤n≤6
m
n=6
n ≤ 0, n ≥ 7
01234 567
01234 5
m
n=7
01234 5
m
n=8
n
27
01234 56
m
01234 567
m
01234 5678
m
28
Convolution Example
Convolution Example
The impulse response of an LTI system is of the form:
h[n ] = a n u[n ]
| a |< 1
and the input to the system is of the form:
x [ n ] = b n u [n ]
| b |< 1, b ≠ a
Determine the output of the system using the formula
for discrete convolution.
SOLUTION:
y [n ] =
∞
∑a
m
u[ m ] b n − m u[ n − m ]
m =−∞
= bn
n
∑a
m =0
m
b − m u [n ] = b n
n
∑ (a / b )
m
u [n ]
m =0
⎡1 − (a / b )n +1 ⎤ ⎡ b n +1 − a n +1 ⎤
= bn ⎢
⎥=⎢
⎥ u [n ]
⎣ 1 − (a / b ) ⎦ ⎣ b − a ⎦
29
30
5
Convolution Example
Linear Time-Invariant Systems
Consider a digital system with input x [n ] = 1 for
n = 0,1,2,3 and 0 everywhere else, and with impulse
•
•
•
•
response h[n ] = a u[n ], | a |< 1. Determine the
n
response y [n ] of this linear system.
SOLUTION:
easiest to understand
easiest to manipulate
powerful processing capabilities
characterized completely by their response to unit sample,
h(n), via convolution relationship
∞
∞
k =−∞
k =−∞
∑ x[k ] h[n − k ] = ∑ h[k ] x[n − k ]
We recognize that x [n ] can be written as the difference between two
y [n ] = x[n ] ∗ h[n ] =
step functions, i.e., x [n ] = u[n ] − u[n − 4]. Hence we can solve for y [n ]
as the difference between the output of the linear system with a step input
y [n ] = h[n ] ∗ x[n ], where ∗ denotes discrete convolution
x[n]
and the output of the linear system with a delayed step input. Thus we solve
for the response to a unit step as:
⎡ a n − a −1 ⎤
u [n − m ] = ⎢
u[n ]
−1 ⎥
⎣ 1− a ⎦
y [n ] = y1[n ] − y1[n − 4]
y 1[ n ] =
∞
∑ u[m] a
• used as models for speech production (source convolved
with system)
31
Signal Processing Operations
x[n]
x[n]
32
Equivalent LTI Systems
x1[n]
h1[n]
h2[n]
h1[n]
y[n]
x[n]
x[n]
x2[n]
x[n]
h2[n]
h1[n]
x[n-1]
x[n]
h1[n]*h2[n]
h2[n]
y[n]
y[n]
x[n]
x[n]
* h[n]
• basis for linear filtering
n −m
m =−∞
x1[n]+x2[n]
y[n]=x[n]
h[n]
h1[n]+h2[n]
y[n]
y[n]
h1[n]*h2[n]= h2[n]*h1[n]
h1[n]+h2[n]= h2[n]+h1[n]
D is a delay of 1-sample
Can replace D with delay element z −1
33
34
More Complex Filter Interconnections
Network View of Filtering (FIR Filter)
h2[n]
x[n]
y[n]
h1[n]
h3[n]
h4[n]
D (Delay Element) ⇔ z −1
y [n ] = b0 x [n ] + b1x [n − 1] + ... + bM −1x [n − M + 1] + bM x [n − M ]
y [n ] = x [n ] * hc [n ]
hc [n ] = h1[n ] * (h2 [n ] + h3 [n ]) + h4 [n ]
35
36
6
Network View of Filtering (IIR Filter)
x[n]
z-Transform
Representations
y[n]
y [n ] = −a1y [n − 1] + b0 x[n ] + b1x [n − 1]
37
Transform Representations
−1
infinite power series in z ,
with x[n] as coefficients of
−n
term in z
∞
∑ x[n]z
−n
1
2π j
• partial fraction expansion of X(z)
∫
X (z)z n −1dz
C
0.8
0.7
0.6
0.5
0.4
X (z ) = z − n0 − − converges for | z |> 0, n0 > 0;
• direct evaluation using residue theorem
n =−∞
x[ n ] =
1
0.9
1. x[n ] = δ [n − n0 ] -- delayed impulse
0.3
0.2
0.1
0
0
1
2. x[n ] = u[n ] − u[n − N ] -- box pulse
6
7
8
9
0.8
1 − z −N
-- converges for 0 <| z |< ∞
1 − z −1
n =0
• all finite length sequences converge in the region 0 <| z |< ∞
• X(z) converges (is finite) only for certain values of z:
4
5
sample number
1
N-1
• power series expansion
3
0.9
X(z) = ∑ (1)z − n =
• long division
2
| z |< ∞, n0 < 0; ∀z, n0 = 0
0.7
0.6
amplitude
x[n ] ←⎯
→ X (z)
X (z) =
Examples of Convergence Regions
am
plitude
• z-transform:
38
0.5
0.4
0.3
0.2
0.1
0
0
1
2
3
4
5
sample number
6
7
8
9
3. x[n ] = a nu[n ] (a < 1)
1
∑ | x[n] | | z
−n
|<∞
∞
- sufficient condition for convergence
n =−∞
• region of convergence: R1 < |z| < R2
1
--converges for | a |<| z |
1 − az −1
n =0
• all infinite duration sequences which are non-zero for n ≥ 0
X (z ) = ∑ a n z − n =
0.9
0.8
0.7
0.6
amplitude
∞
0.5
0.4
0.3
0.2
0.1
0
0
5
10
15
20
25
30
sample number
35
40
45
50
converge in a region | z |> R1
39
40
Examples of Convergence Regions
Example
0
-0.1
-0.2
-0.3
amplitude
-0.4
-0.5
-0.6
If x [n ] has z-transform X ( z ) with ROC of
ri <| z |< ro , find the z -transform, Y ( z ), and
-0.7
4. x[n ] = −b nu[ −n − 1]
−1
-0.8
-0.9
-1
-50
-45
-40
-35
-30
-25
-20
sample number
-15
-10
-5
0
1
X ( z ) = ∑ −b z =
--converges for | z |<| b |
1 − bz −1
n =−∞
• all infinite duration sequences which are non-zero for n < 0
n
−n
the region of convergence for the sequence
y [n ] = a n x [n ] in terms of X ( z )
converge in a region | z |< R2
Solution:
5. x[n ] non-zero for − ∞ < n < ∞ can be viewed
as a combination of 3 and 4,giving a convergence
region of the form R1 <| z |< R2
• sub-sequence for n ≥ 0 => | z |> R1
• sub-sequence for n < 0 => | z |< R2
X (z) =
∞
∑ x [ n ]z
−n
n =−∞
Y (z) =
R2
∞
∑ y [ n ]z
−n
=
n =−∞
R1
=
∞
∑ x[n](z / a)
∞
∑a
n
x [ n ]z − n
n =−∞
−n
= X (z / a)
n =−∞
• total sequence => R1 <| z |< R2
41
ROC: | a | ri <| z |<| a | ro
42
7
z-Transform Property
Inverse z-Transform
The sequence x [n ] has z-transform X ( z ).
Show that the sequence nx[n ] has z-transform
−z
x[ n ] =
dX ( z )
.
dz
X (z) =
∫ X ( z )z
n −1
dz
C
where C is a closed contour that encircles the origin
Solution:
∞
1
2π j
∑ x [ n ]z
of the z-plane and lies inside the region of convergence
−n
n =−∞
∞
dX ( z )
= − ∑ nx[n ]z − n −1
dz
n =−∞
for X(z) rational, can use
a partial fraction
expansion for finding
inverse transforms
C
1 ∞
= − ∑ nx[n ]z − n
z n =−∞
1
= − Z (nx[n ])
z
R2
R1
43
Partial Fraction Expansion
H (z) =
44
Example of Partial Fractions
Find the inverse z-transform of H (z ) =
b0 z M + b1z M −1 + ... + bM
z N + a1z N −1 + ... + aN
A
A
A
H (z )
z2 + z + 1
=
= 0+ 1 + 2
z
z (z + 1)(z + 2) z z + 1 z + 2
b z M + b1z M −1 + ... + bM
= 0
; (N ≥ M )
(z − p1 )(z − p2 )...(z − pN )
A1
A2
AN
+
+ ... +
H (z) =
z − p1 z − p2
z − pN
A0 =
z2 + z + 1
1
=
(z + 1)(z + 2) z =0 2
A0
H (z)
A1
A2
AN
=
+
+
+ ... +
; p0 = 0
z
z − p0 z − p1 z − p2
z − pN
A2 =
z2 + z + 1
3
=
z(z + 1) z =−2 2
Ai = (z − pi )
z2 + z + 1
1 <| z |< 2
(z 2 + 3z + 2)
A1 =
z2 + z + 1
= −1
z(z + 2) z =−1
1
z
(3 / 2)z
−
+
1 <| z |< 2
2 z +1 z + 2
1
3
h[n ] = δ [n ] − (−1)n u[n ] − (−2)n u[−n − 1]
2
2
H (z ) =
H (z )
i = 0,1,..., N
z z = pi
45
46
Transform Properties
Linearity
Shift
Exponential Weighting
Linear Weighting
Time Reversal
Convolution
ax1[n]+bx2[n]
x[n-n0]
anx[n]
n x[n]
x[-n]
non-causal, need x[N0-n] to be
causal for finite length sequence
x[n] * h[n]
Multiplication of x[n] w[n]
Sequences
aX1(z)+bX2(z)
z − n0 X ( z)
X(a-1z)
-z dX(z)/dz
X(z-1)
X(z) H(z)
1
2π j
∫ X (v )W (z / v )v
−1
dv
C circular convolution in the frequency
DiscreteTime Fourier
Transform
(DTFT)
domain
47
48
8
Simple DTFTs
Discrete-Time Fourier Transform
X (e jω ) = X (z ) |z =e jω =
∞
∑ x[n]e
− jωn
n =−∞
z = e jω ; | z |= 1, arg(z ) = j ω
x[ n ] =
1
2π
π
∫π X (e
jω
)e jωn dω
x[n ] = δ [n ],
Delayed
impulse
x[n ] = δ [n − n0 ], X (e jω ) = e − jωn0
Step function
x[n ] = u[n ],
Rectangular
window
−
• evaluation of X(z) on the unit circle in the z-plane
Exponential
• sufficient condition for existence of Fourier transform is:
∞
∑ | x[n] | | z
n =−∞
−n
|=
∞
∑ | x[n] |< ∞, since
| z |= 1
n =−∞
Backward
exponential
49
X (e j ω ) = 1
Impulse
1
1 − e − jω
1 − e − jωN
x[n ] = u[n ] − u[n − N ], X (e jω ) =
1 − e − jω
1
x[n ] = a n u[n ],
X (e j ω ) =
, a <1
1 − ae − jω
1
, b >1
x[n ] = −b n u[ −n − 1], X (e jω ) =
1 − be − jω
X (e j ω ) =
50
DTFT Examples
DTFT Examples
x[n ] = β nu[n ] β = 0.9
1
X (e jω ) =
| β |< 1
1 − β e − jω
x [n ] = cos(ω0 n ),
jω
X (e ) =
−∞ < n < ∞
∞
∑ [πδ (ω − ω
k =−∞
0
+ 2π k ) + πδ (ω + ω0 + 2π k )]
Within interval − π < ω < π , X (e jω ) is comprised
of a pair of impulses at ± ω0
x[n ] = cos(ω0 n )
51
DTFT Examples
52
DTFT Examples
x[n ] = rect M [n ]
h[n ]
53
54
9
Fourier Transform Properties
Periodic DT Signals
0.25, π/2, FS/ 4, π FS/ 2
• periodicity in ω
0. 5, π, FS/ 2, π FS
0,0,0,0
1, 2π, FS, 2π FS
X (e jω ) = X (e j (ω + 2π n ) )
f, ω, f
• period of 2π corresponds to once around
0.75, 3π/2, 3FS/ 4, π 3FS/ 2
D,
ωD
• normalized frequency: f, 0Æ0.5Æ1 (independent of FS)
• normalized radian frequency: ω, 0Æ πÆ2 π (independent of FS)
– e.g., ωk = 2π k/N,
• digital frequency: fD= f *FS, 0ÆFS/2ÆFS
k=0,1,…,N-1
55
56
Periodic DT Signals
Periodic DT Signals
Example 1:
Example 2:
Fs = 11059 Hz; Is the signal
Fs = 10, 000 Hz
Is the signal x[n] = cos(2π ⋅100n / Fs ) a periodic signal?
x[n] = cos(2π ⋅100n / Fs ) periodic? If so, what is the period.
If so, what is the period.
Solution:
Solution:
If the signal is periodic with period N , then we have:
x [ n ] = x[ n + N ]
If the signal is periodic with period N , then we have:
x[ n] = x[ n + N ]
cos(2π ⋅ 100n / Fs ) = cos(2π ⋅ 100( n + N ) / Fs )
cos(2π ⋅100n / Fs ) = cos(2π ⋅100( n + N ) / Fs )
2π ⋅ 100 N
= 2π ⋅ k ( k an integer )
Fs
2π ⋅100 N
= 2π ⋅ k (k an integer )
Fs
k=
100 N 100 N
N
=
=
10, 000 100
Fs
For k an integer we get N = 100k = 100 (for k = 1)
Thus x[ n] is periodic of period 100 samples.
= Ae
which requires ω0N = 2π k for some integer k
• Thus, not all DT sinusoids are periodic!
• Consequence: there are N distinguishable
frequencies with period N
Units of Frequency (Digital Domain) (Trap #2 - loss of FS)
k=
= Ae
Ae
unit circle in the z -plane
• digital radian frequency: ωD= ω *FS, 0Æ πFSÆ2πFS
• A signal is periodic with period N if x[n] = x[n+N]
for all n
• For the complex exponential this condition
becomes
j (ω0 n +ω0 N )
jω0 n
jω0 ( n + N )
100 N 100 N
=
11, 059
Fs
11059
k which is not an integer
100
Thus x[n ] is not periodic at this sampling rate.
For k an integer we get N =
57
58
Periodic Sequences??
Periodic DT Signals
Example 3:
Fs = 10, 000 Hz
Is the signal x[n] = cos(2π ⋅101n / Fs ) a periodic signal?
If so, what is the period.
Solution:
If the signal is periodic with period N , then we have:
x[ n] = x[ n + N ]
cos(2π ⋅101n / Fs ) = cos(2π ⋅101(n + N ) / Fs )
2π ⋅101N
= 2π ⋅ k ( k an integer )
Fs
k=
101N 101N
=
which is not an integer
10, 000
Fs
Thus x[ n] is not periodic at this sampling rate.
59
60
10
Discrete Fourier Transform
• consider a periodic signal with period N (samples)
x%[n ] = x%[n + N ], − ∞ < n < ∞
x%[n ] can be represented exactly by a discrete
The DFT – Discrete
Fourier Transform
sum of sinusoids
N −1
X% [k ] = ∑ x%[n ]e − j 2π kn / N
• N sequence values
n =0
x%[n ] =
61
N −1
1
∑ X% [k ]e j 2π kn / N
N k =0
• N DFT coefficients
• exact representation of the discrete periodic sequence
DFT Unit Vectors (N=8)
62
DFT Examples
k = 0; e − j 2π k /8 = 1
2
(1 − j )
2
=−j
k = 1; e − j 2π k /8 =
k = 2; e
− j 2π k /8
δ [ n]
2
k = 3; e
=
(−1 − j )
2
− j 2π k /8
k = 4; e
= −1
DFT{δ [n]}
− j 2π k /8
k = 5; e − j 2π k /8 =
1
2
( −1 + j )
2
1
n
k
k = 6; e − j 2π k /8 = j
k = 7; e − j 2π k /8 =
2
(1 + j )
2
63
DFT Examples
DFT Examples
x[n]
64
x%[n ] = (0.9)n 0 ≤ n ≤ 31 (N = 32)
X [k]
65
66
11
Circularly Shifting Sequences
Review
DTFT of sequence { x[n ], − ∞ < n < ∞}
x[n-2]
x[n]
x((n-2))
X (e jω ) =
∞
∑ x [n ] e
− j ωn
n =−∞
1 π
X (e jω ) e jωn
2π ∫−π
DFT of periodic sequence { x% [n], 0 ≤ n ≤ N − 1}
x[n ] =
x[n-1]
x((n-1))
x[-n]
x((-n))
N −1
X% [k ] = ∑ x% [n ] e − j 2π nk / N , 0 ≤ k ≤ N − 1
n =0
1 N −1
x% [n ] = ∑ X% [k ] e j 2π nk / N , 0 ≤ n ≤ N − 1
N k =0
67
68
Finite Length Sequences
• consider a finite length (but not periodic)
sequence, x[n], that is zero outside the interval
0 ≤ n ≤ N −1
DFT for Finite Length
Sequences
N −1
X (z ) = ∑ x[n ]z − n
n =0
• evaluate X(z) at N equally spaced points on the unit circle,
zk = e
j 2π k / N
69
Relation to Periodic Sequence
Periodic and Finite Length Sequences
0.8
0.7
r =−∞
amplitude
∑ x [n + r N ]
~
0.5
j 2π k /N
~
x[n]
0.4
0.3
X[k]
0.2
periodic signal => line
spectrum in frequency
0.1
0
0
2
4
6
8
10
s ample number
12
14
16
18
- the Fourier coefficients, X% [k ], are then identical to the values
of X (e
N −1
1
0.6
x% (n ) =
)=
0.9
sequence of replicas of x[n]
∞
j 2π k / N
∑ x[n ]e− j 2π kn /N , k =0,1,...,N −1
n =0
70
--looks like DFT of periodic sequence!
X [k ]=X (e
-consider a periodic sequence, x% [n ], consisting of an infinite
, k = 0,1, ..., N − 1
n
k
) for the finite duration sequence => a sequence
of length N can be exactly represented by a DFT representation
x[n]
of the form:
N −1
− j 2π nk / N
X [k ] = ∑ x[n ]e
, k = 0,1,..., N − 1
n=0
1 N −1
j 2π kn / N , n = 0,1,..., N − 1
x[ n ] =
∑ X [k ]e
Nk =0
Works for both
finite sequence
and for periodic
sequence
71
X(ejω)
n
ω
finite duration =>
continuous spectrum
in frequency
72
12
Sampling in Frequency (Time Domain Aliasing)
Consider a finite duration sequence:
x[n ] ≠ 0 for 0 ≤ n ≤ L − 1
S(e )
i.e., an L − point sequence, with discrete time Fourier transform
. . .
If the duration of the finite duration signal satisfies the relation
L −1
X (e jω ) = ∑ x[n ] e − jωn 0 ≤ ω ≤ 2π
0 1 2 3 4
n =0
Consider sampling the discrete time Fourier transform by
multiplying it by a signal that is defined as:
N −1
S (e ) = ∑ δ [ω − 2π k / N ]
jω
N-1 k
ω=2πk/N
s[n]
. . .
. . .
k =0
with time-domain representation
s[n ] =
Sampling in Frequency (Time Domain Aliasing)
jω
-N
∞
∑ δ [n − rN ]
0
N
2N
n
r =−∞
N ≥ L, then only the first term in the infinite summation affects
the interval 0 ≤ n ≤ L − 1 and there is no time domain aliasing, i.e.,
x%[n ] = x[n ] 0 ≤ n ≤ L − 1
If N < L, i.e., the number of frequency samples is smaller than the
duration of the finite duration signal, then there is time domain aliasing
and the resulting aliased signal (over the interval 0 ≤ n ≤ L − 1) satisfies
the aliasing relation:
x%[n ] = x[n ] + x[n + N ] + x[n − N ] 0 ≤ n ≤ N − 1
Thus we form the spectral sequence
X% (e jω ) = X (e jω ) ⋅S (e jω )
which transforms in the time domain to the convolution
∞
x% [n ] = x[n ]∗ s[n ] = x[n ] ∗ ∑ δ [n − rN ] =
r =−∞
∞
∑ x[n − rN ]
r =−∞
x%[n ] = x[n ] + x[n − N ] + x[n + N ] + ...
73
74
Time Domain Aliasing Example
DFT Properties
Consider the finite duration sequence
Periodic Sequence
4
x[n ] = ∑ (m + 1) δ [n − m] = δ [n ] + 2δ [n − 1] + 3δ [n − 2] + 4δ [n − 3] + 5δ [n − 4]
m =0
DFT defined for all k
-2 -1
0
1
2
3
4
5
6
7
8
Finite Sequence
Period=N
Length=N
Sequence defined for all n Sequence defined for n=0,1,…,N-1
DTFT defined for all ω
n
The discrete time Fourier transform of x[n] is computed and sampled at N frequencies
around the unit circle. The resulting sampled Fourier transform is inverse
transformed back to the time domain. What is the resulting time domain signal, x%[n],
(over the interval 0 ≤ n ≤ L − 1) for the cases N = 11, N = 5 and N = 4.
SOLUTION:
For the cases N = 11 and N = 5, we have no aliasing (since N ≥ L) and we get x%[n ] = x[n ]
over the interval 0 ≤ n ≤ L − 1. For the case N = 4, the n = 0 value is aliased, giving
x%[0] = 6 (as opposed to 1 for x[0]) with the remaining values unchanged.
•
when using DFT representation, all sequences behave as if they
were infinitely periodic => DFT is really the representation of the
extended periodic function, x%[n ] =
• alternative (equivalent) view is that all sequence indices must be
interpreted modulo N
x%[n ] =
75
∞
∑ x[n + rN ] = x[n modulo N ] = x ([n])
r =−∞
77
N
76
DFT Properties
DFT Properties for Finite Sequences
• X[k], the DFT of the finite sequence x[n], can be
viewed as a sampled version of the z-transform
(or Fourier transform) of the finite sequence
(used to design finite length filters via frequency
sampling method)
• the DFT has properties very similar to those of
the z-transform and the Fourier transform
• the N values of X[k] can be computed very
efficiently (time proportional to N log N) using the
set of FFT methods
• DFT used in computing spectral estimates,
correlation functions, and in implementing digital
filters via convolutional methods
∞
∑ x[n + rN ]
r =−∞
N-point DFT
N-point sequences
1. Linearity
2. Shift
ax1[n ] + bx2 [n ]
aX1[k ] + bX 2 [k ]
e − j 2π kn0 / N X [k ]
x( [n − n0 ])N
X ∗ [k ]
3. Time Reversal x ([−n ])N
4. Convolution
N −1
∑ x[m] h([n − m])
m =0
5. Multiplication
x[n ] w [n ]
N
X [k ] H [k ]
1 N −1
∑ X [r ]W ([k − r ])N
N r =0
78
13
Key Transform Properties
Sampling Function
y [n ] = x1[n ] ∗ x2 [n ] ⇔ Y (e jω ) = X1(e jω ) ⋅ X 2 (e jω )
convolution
multiplication
jω
jω
x[n]
y [n ] = x1[n ] ⋅ x2 [n ] ⇔ Y (e ) = X1(e ) ⊗ X 2 (e )
multiplication
circular convolution
M
0
Special Case: x2 [n ] = impulse train of period M samples
x2 [ n ] =
...
...
jω
X 2 [k ] = ∑ δ [n ] e
n
X [k]
∞
∑ δ [k − nM ]
...
k =−∞
M −1
2M
− j 2π nk / M
= 1, k = 0,1,..., M − 1
0 1
n =0
1 M −1
1 M −1
x2 [n ] = ∑ X 2 [k ] e j 2π nk / M = ∑ e j 2π nk / M sampling function
M k =0
M k =0
2 3 4
0 2π 4π 6π
ω M M M
5
M-1
k
(M-1)2π
M
79
80
Summary of DSP-Part 1
• speech signals are inherently bandlimited => must
sample appropriately in time and amplitude
• LTI systems of most interest in speech processing; can
characterize them completely by impulse response, h(n)
• the z-transform and Fourier transform representations
enable us to efficiently process signals in both the time
and frequency domains
• both periodic and time-limited digital signals can be
represented in terms of their Discrete Fourier transforms
• sampling in time leads to aliasing in frequency; sampling
in frequency leads to aliasing in time => when
processing time-limited signals, must be careful to
sample in frequency at a sufficiently high rate to avoid
time-aliasing
Digital Filters
81
82
Digital Filters
Digital Filters
• digital filter is a discrete-time linear, shift invariant
system with input-output relation:
y [n ] = x[n ] ∗ h[n ] =
∞
∑
x[m] h[n − m]
m =−∞
Y (z ) = X (z) ⋅ H (z)
• H (z) is the system function with H (e jω )
as the complex frequency response
H (e jω ) = Hr (e jω ) + jHi (e jω )
H (e jω ) =| H (e jω ) | e j arg|H ( e
jω
)|
H (e j ω )
real, imaginary representation
∞
∑ | h[n] |< ∞
magnitude, phase representation
log H (e jω ) = log | H (e jω ) | + j arg | H (e jω ) |
n =−∞
log | H (e jω ) |= Re ⎡⎣log H (e jω ) ⎤⎦
j arg | H (e jω ) |= Im ⎡⎣ log H (e jω ) ⎤⎦
• causal linear shift-invariant => h[n]=0 for n<0
• stable system => every bounded input produces a
bounded output => a necessary and sufficient
condition for stability and for the existence of
83
84
14
Digital Filter Implementation
Digital Filters
• input and output satisfy linear difference equation of the
form:
N
M
k =1
r =0
−1
• H(z) is a rational function in z
y [n ] − ∑ ak y [n − k ] = ∑ br x[n − r ]
• evaluating
O
z-transforms of both sides gives:
N
M
k =1
r =0
M
H (z) =
Y (z) − ∑ ak z − kY (z ) = ∑ br z − r X (z)
N
M
k =1
r =0
M
∑b z
r =0
N
−r
r
1 − ∑ ak z − k
r =1
N
∏ (1 − dk z −1 )
O
=> M zeros, N poles
• converges for | z |> R1 , with R1 < 1 for stability
canonic form
showing poles
and zeros
k =1
X
O
k =1
Y (z) (1 − ∑ ak z − k ) = X (z)∑ br z − r
Y (z )
H (z) =
=
X (z)
A∏ (1 − cr z )
−1
X
X
X
O
=>
all poles of H (z ) inside the unit circle for a
stable, causal system
85
86
Ideal Filter Responses
FIR Systems
•
if ak=0, all k, then
M
y [n ] = ∑ br x[n − r ] = b0 x[n ] + b1 x[n − 1] + ... + bM x[n − M ]
=>
r =0
1. h[n ] = bn 0 ≤ n ≤ M
=0
M
otherwise
2. H (z ) = ∑ bn z − n =>
n =0
M −1
∏ (1 − c
m =0
m
z −1 ) => M zeros
3. if h[n ] = ± h[M − n ] (symmetric, antisymmetric)
H(e jω ) = A(e jω )e − jωM / 2 , A(e jω ) = real (symmetric), imaginary (anti-symmetric)
• linear phase filter => no signal dispersion because of non-linear phase =>
precise time alignment of events in signal
87
FIR Filters
event at t0
FIR Linear
Phase Filter
event at t0 +
fixed delay
88
Window Designed Filters
• cost of linear phase filter designs
– can theoretically approximate any desired
response to any degree of accuracy
– requires longer filters than non-linear phase
designs
Windowed impulse response
h[n ] = hI [n ] ⋅w [n ]
In the frequency domain we get
• FIR filter design methods
– window design => analytical, closed form
method
– frequency sampling => optimization method
– minimax error design => optimal method
H (e jω ) = HI (e jω ) ∗W (e jω )
89
90
15
LPF Example Using RW
LPF Example Using RW
0
0.2 π
0.4 π
0.6 π
0.8 π
π
0.6 π
0.8 π
π
Frequency
91
0
0.2 π
0.4 π
92
Frequency
LPF Example Using RW
Common Windows (Time)
0≤n≤M
⎧1
1. Rectangular w [n ] = ⎨
⎩0
2. Bartlett
3. Blackman
0
0.25 π
0.5 π
0.75 π
π
Frequency
4. Hamming
0
0.25 π
0.5 π
0.75 π
π
2|n −M / 2|
M
⎛ 2π n ⎞
⎛ 4π n ⎞
w [n ] = 0.42 − 0.5cos ⎜
⎟ + 0.08cos ⎜
⎟
⎝ M ⎠
⎝ M ⎠
w [n ] = 1 −
⎛ 2π n ⎞
w [n ] = 0.54 − 0.46 cos ⎜
⎟
⎝ M ⎠
5. Hanning
⎛ 2π n ⎞
w [n ] = 0.5 − 0.5cos ⎜
⎟
⎝ M ⎠
6. Kaiser
w [n ] =
{
I0 β 1 − ((n − M / 2) / (M / 2)) 2
93
Frequency
Common Windows (Frequency)
Window
otherwise
Sidelobe
Width
Attenuation
− 13 dB
− 27 dB
Hanning
Hamming
8π /M
8π /M
− 32 dB
− 43 dB
Blackman
12π /M
− 58dB
}
94
Window LPF Example
Mainlobe
Rectangular 4π / M
Bartlett
8π /M
I0 {β }
0
0.2 π
0.4 π
0.6 π
0.8 π
π
0.6 π
0.8 π
π
Frequency
95
0
0.2 π
0.4 π
96
Frequency
16
Equiripple Design Specifications
Optimal FIR Filter Design
• Equiripple in each defined band (passband
and stopband for lowpass filter, high and
low stopband and passband for bandpass
filter, etc.)
• Optimal in sense
that the cost function
π
1
(
) | H (ω) − H (ω) | dω
E=
β
ω
2π ∫π
is minimized. Solution via well known
iterative algorithm based on the alternation
theorem of Chebyshev approximation.
2
d
−
ωp = normalized edge of passband frequency
ωs = normalized edge of stopband frequency
δ p = peak ripple in passband
δ s = peak ripple in stopband
Δω =ωs − ωp = normalized transition bandwidth
97
Remez Lowpass Filter Design
MATLAB FIR Design
1.
Use fdatool to design digital filters
2.
Use firpm to design FIR filters
3.
•
B=firpm(N,F,A)
•
N+1 point linear phase, FIR design
•
B=filter coefficients (numerator polynomial)
•
F=ideal frequency response band edges (in pairs) (normalized to 1.0)
•
A=ideal amplitude response values (in pairs)
Use freqz to convert to frequency response (complex)
•
4.
98
[H,W]=freqz(B,den,NF)
•
H=complex frequency response
•
W=set of radian frequencies at which FR is evaluated (0 to pi)
•
B=numerator polynomial=set of FIR filter coefficients
•
den=denominator polynomial=[1] for FIR filter
•
NF=number of frequencies at which FR is evaluated
N=30
F=[0 0.4 0.5 1];
A=[1 1 0 0];
B=firpm(N,F,A)
NF=512; number of frequency points
[H,W]=freqz(B,1,NF);
Use plot to evaluate log magnitude response
•
plot(W/pi, 20log10(abs(H)))
99
100
plot(W/pi,20log10(abs(H)));
Remez Bandpass Filter Design
FIR Implementation
% bandpass_filter_design
N=input('Filter Length in Samples:');
F=[0 0.18 .2 .4 .42 1];
A=[0 0 1 1 0 0];
B=firpm(N,F,A);
NF=1024;
[H,W]=freqz(B,1,NF);
x[n]
figure,orient landscape;
stitle=sprintf('bandpass fir design,
N:%d,f: %4.2f %4.2f %4.2f %4.2f %4.2f
%4.2f',N,F);
n=0:N;
subplot(211),plot(n,B,'r','LineWidth',2);
axis tight,grid on,title(stitle);
xlabel('Time in Samples'),ylabel('Amplitude');
legend('Impulse Response');
subplot(212),plot(W/pi,20*log10(abs(H)),'b','LineWidth',2);
axis ([0 1 -60 0]), grid on;
xlabel('Normalized Frequency'),ylabel('Log Magnitude (dB)');
legend('Frequency Response');
x[ n − 1]
x[n − 2]
x[n − 3]
x[n − M ]
y[n]
• linear phase filters can be implemented with half
the multiplications (because of the symmetry of
the coefficients)
101
102
17
IIR Systems
N
M
k =1
r =0
IIR Design Methods
y [n ] = ∑ ak y [n − k ] + ∑ br x[n − r ]
• y [n ] depends on y [n − 1], y [n − 2],..., y [n − N ] as well as
x[n ], x[n − 1],..., x[n − M ]
• for M < N
M
H (z ) =
∑b z
r =0
N
−r
r
1 − ∑ ak z
N
−k
=∑
k =1
Ak
- partial fraction expansion
1 − dk z −1
k =1
N
h[n ] = ∑ Ak (d k )n u[n ] - for causal systems
k =1
h[n ] is an infinite duration impulse response
103
• Impulse invariant transformation – match the
analog impulse response by sampling; resulting
frequency response is aliased version of analog
frequency response
• Bilinear transformation – use a transformation
to map an analog filter to a digital filter by
warping the analog frequency scale (0 to infinity)
to the digital frequency scale (0 to pi); use
frequency pre-warping to preserve critical
frequencies of transformation (i.e., filter cutoff
frequencies)
104
IIR Filter Design
Butterworth Design
0
0.2 π
0.4 π
0.6 π
0.8 π
π
0.6 π
0.8 π
π
Frequency
105
0
0.2 π
0.4 π
Frequency
Chebyshev Type I Design
106
Chebyshev BPF Design
0
0.2 π
0.4 π
0.6 π
0.8 π
π
0.6 π
0.8 π
ππ
Frequency
107
0
0.2 π
0.4 π
Frequency
108
18
Chebyshev Type II Design
0
0.2 π
0.4 π
0.6 π
0.8 π
Elliptic BPF Design
π
0
0.2 π
Frequency
0
0.2 π
0.4 π
0.4 π
0.6 π
0.8 π
π
0.6 π
0.8 π
π 110
Frequency
0.6 π
0.8 π
π
109
0
Frequency
0.2 π
0.4 π
Frequency
IIR Filters
Matlab Elliptic Filter Design
• IIR filter issues:
• use ellip to design elliptic filter
– efficient implementations in terms of computations
– can approximate any desired magnitude response
with arbitrarily small error
– non-linear phase => time dispersion of waveform
• IIR design methods
– Butterworth designs-maximally flat amplitude
– Bessel designs-maximally flat group delay
– Chebyshev designs-equi-ripple in either passband or
stopband
– Elliptic designs-equi-ripple in both passband and
stopband
–
–
–
–
–
–
–
[B,A]=ellip(N,Rp,Rs,Wn)
B=numerator polynomial—N+1 coefficients
A=denominator polynomial—N+1 coefficients
N=order of polynomial for both numerator and denominator
Rp=maximum in-band (passband) approximation error (dB)
Rs=out-of-band (stopband) ripple (dB)
Wp=end of passband (normalized radian frequency)
• use filter to generate impulse response
– y=filter(B,A,x)
– y=filter impulse response
– x=filter input (impulse)
• use zplane to generate pole-zero plot
– zplane(B,A)
111
Matlab Elliptic Lowpass Filter
112
IIR Filter Implementation
M=N=4
N
M
k =1
r =0
y [n ] = ∑ ak y [n − k ] + ∑ br x[n − r ]
N
w [n ] = ∑ ak w [n − k ] + x[n ]
k =1
M
y [n ] = ∑ br w [n − r ]
r =0
[b,a]=ellip(6,0.1,40,0.45); [h,w]=freqz(b,a,512); x=[1,zeros(1,511)]; y=filter(b,a,x); zplane(b,a);
appropriate plotting commands;
113
114
19
IIR Filter Implementations
IIR Filter Implementations
c0 k + c1k z −1
, parallel system
−1
− a2 k z −2
k =1 1 − a1k z
K
N
H (z) =
A∏ (1 − cr z −1 )
r =1
N
∏ (1 − d z
k =1
k
−1
H (z) = ∑
- zeros at z = cr , poles at z = d k
)
c01
- since ak and br are real, poles and zeros occur in complex conjugate pairs =>
−1
−2
b0k + b1k z + b2 k z
⎡ N + 1⎤
, K =⎢
1 − a1k z −1 − a2k z −2
⎣ 2 ⎥⎦
- cascade of second order systems
K
H(z) = A∏
Common form
for speech
synthesizer
implementation
k =1
a21
Used in formant
synthesis
systems based
on ABS
methods
c02
a12
c12
115
DSP in Speech Processing
Sampling of Waveforms
• filtering — speech coding, post filters, pre-filters, noise
reduction
• spectral analysis — vocoding, speech synthesis,
speech recognition, speaker recognition, speech
enhancement
• implementation structures — speech synthesis,
analysis-synthesis systems, audio encoding/decoding for
MP3 and AAC
• sampling rate conversion — audio, speech
–
–
–
–
116
DAT — 48 kHz
CD — 44.06 kHz
Speech — 6, 8, 10, 16 kHz
Cellular — TDMA, GSM, CDMA transcoding
xa(t)
x[n],x(nT)
Sampler and
Quantizer
Period, T
x[n ] = xa (nT ), − ∞ < n < ∞
T = 1/ 8000 sec =125 μ sec for 8kHz sampling rate
T = 1/10000 sec = 100 μ sec for 10 kHz sampling rate
T = 1/16000 sec = 67 μ sec for 16 kHz sampling rate
T = 1/ 20000 sec = 50 μ sec for 20 kHz sampling rate
117
The Sampling Theorem
118
Sampling Theorem Equations
If a signal xa(t) has a bandlimited Fourier transform Xa(jΩ)
such that Xa(jΩ)=0 for Ω≥2πFN, then xa(t) can be uniquely
reconstructed from equally spaced samples xa(nT), -∞<n<∞, if
1/T≥2 FN (FS≥2FN) (A-D or C/D converter)
∞
xa (t ) ←⎯
→ X a ( j Ω) =
a
(t ) e − j Ωt dt
−∞
xa(t)
x[n ] ←⎯
→ X (e j ΩT ) =
∞
∑x
n =−∞
xa(nT)
1
X (e j ΩT ) =
T
xa(nT) = xa(t) uT(nT), where uT(nT) is a periodic pulse train of period T,
with periodic spectrum of period 2π/T
∫x
119
∞
∑X
k =−∞
a
a
(nT )e − j ΩnT
( j Ω + j 2π k / T )
120
20
Sampling Rates
Sampling Theorem Interpretation
To avoid aliasing need:
2π / T − ΩN > ΩN
• FN = Nyquist frequency (highest frequency with
significant spectral level in signal)
• must sample at at least twice the Nyquist
frequency to prevent aliasing (frequency
overlap)
–
–
–
–
⇒ 2π / T > 2 ΩN
⇒ Fs = 1/ T > 2FN
case where 1 / T < 2FN ,
aliasing occurs
telephone speech (300-3200 Hz) => FS=6400 Hz
wideband speech (100-7200 Hz) => FS=14400 Hz
audio signal (50-21000 Hz) => FS=42000 Hz
AM broadcast (100-7500 Hz) => FS=15000 Hz
• can always sample at rates higher than twice the
Nyquist frequency (but that is wasteful of
processing)
121
122
Decimation and Interpolation of
Sampled Waveforms
Recovery from Sampled Signal
• If 1/T > 2 FN the Fourier transform of the sequence of samples is
proportional to the Fourier transform of the original signal in the
baseband, i.e.,
X (e j ΩT ) =
1
π
X a ( j Ω), | Ω | <
T
T
• can show that the original signal can be recovered from the sampled
signal by interpolation using an ideal LPF of bandwidth π /T, i.e.,
x a (t ) =
⎡ sin(π (t − nT ) / T ) ⎤
∑ xa (nT ) ⎢ π (t − nT ) / T ⎥
n =−∞
⎣
⎦
∞
bandlimited sample
interpolation—perfect at
every sample point,
perfect in-between
samples via interpolation
• CD rate (44.06 kHz) to DAT rate (48 kHz)—media
conversion
• Wideband (16 kHz) to narrowband speech rates (8kHz,
6.67 kHz)—storage
• oversampled to correctly sampled rates--coding
x[n ] = xa (nT ), X a ( j Ω) = 0 for | Ω |> 2π FN
if 1/ T > 2FN (adequate sampling) then
X(e j ΩT ) =
• digital-to-analog converter
π
1
X a ( j Ω), | Ω |<
T
T
123
124
Decimation and Interpolation
Decimation
Standard Sampling: begin with digitized signal:
x[ n] = xa (nT ) ↔ X a ( jΩ) = 0, | Ω |≥ 2π FN ( a)
1
≥ 2 FN
T
π
1
X (e ) = X a ( jΩ), | Ω |<
T
T
X (e jΩT ) = 0, 2π FN ≤| Ω |≤ 2π ( Fs − FN )
Fs =
j ΩT
Decimation, M=2 => T’=2T
(b)
can achieve perfect recovery of xa (t ) from
digitized samples under these conditions
Interpolation, L=2 => T’=T/2
125
126
21
Decimation
Decimation
want to reduce sampling rate of
sampled signal by factor of M ≥ 2
want to compute new signal xd [n]
with sampling rate Fs ' = 1/ T ' = 1( MT ) = Fs / M
such that xd [n] = xa (nT '' ) with no aliasing
need
Fs ' ≥ 2 FN
one solution is to downsample x[n] = xa (nT )
by retaining one out of every M samples of x[n],
giving xd [n] = x[nM ]
to avoid aliasing for M = 2
when
Fs ' < 2 FN
(c )
we get aliasing for M = 2
(d )
127
128
Decimation
Decimation
to decimate by factor of M with no aliasing, need to
ensure that the highest frequency in x[n] is no greater
than Fs / (2M )
DTFTs of x[n] and xd [n] related by aliasing relationship:
thus we need to filter x[n] using an ideal lowpass
1 M −1
∑ X (e j (ω −2π k )/ M )
M k =0
or equivalently (in terms of analog frequency):
X d (e jω ) =
X d (e
j ΩT '
1
)=
M
M −1
∑ X (e
j ( ΩT ' − 2π k )/ M
filter with response:
| ω |< π / M
⎧1
H d (e jω ) = ⎨
⎩0 π / M <| ω |≤ π
using the appropriate lowpass filter, we can down-
)
k =0
1
≥ 2 FN , (i.e., no aliasing) we get:
MT
1
1
1 1
j ΩT '
jΩT '/ M
)=
X d (e ) =
X (e
X (e jΩT ) =
X a ( jΩ)
M
M
MT
1
π
π
= X a ( jΩ), − < Ω <
T'
T'
T'
sample the reuslting lowpass-filtered signal
by a factor of M without aliasing
assuming Fs ' =
129
130
Decimation
Interpolation
using a lowpass filter gives:
1
π
π
Wd (e jΩT ' ) = H d (e jΩT ) X a ( jΩ), − < Ω <
T'
T'
T'
if filter is used, the down-sampled signal, wd [ n],
assume we have x[n] = xa ( nT ), (no aliasing) and we wish to increase
the sampling rate by the integer factor of L
we need to compute a new sequence of samples of xa (t ) with period
T '' = T / L, i.e.,
xi [ n] = xa (nT '') = xa ( nT / L)
no longer represents the original analog signal,
It is clear that we can create the signal
xi [ n] = x[ n / L] for n = 0, ± L, ±2 L,...
xa (t ), but instead the lowpass filtered version of
but we need to fill in the unknown samples by an interpolation process
can readily show that what we want is:
xa (t )
the combined operations of lowpass filtering
and downsampling are called decimation.
⎡ sin[π (nT ''− kT ) / T ] ⎤
⎥
⎣ [π ( nT ''− kT ) / T ] ⎦
equivalently with T '' = T / L, x[n] = xa ( nT ) we get
xi [ n] = xa (nT '') =
xi [ n] = xa (nT '') =
131
∞
∑ x (kT ) ⎢
k =−∞
a
∞
⎡ sin[π (n − k ) / L] ⎤
⎥
⎣ [π ( n − k ) / L] ⎦
∑ x (k ) ⎢
k =−∞
a
which relates xi [ n] to x[ n] directly
132
22
Interpolation
Interpolation
implementing the previous equation by filtering the upsampled sequence
⎧ x [n / L] n = 0, ± L, ±2 L,...
xu [ n] = ⎨
otherwise
⎩ 0
xu [ n] has the correct samples for n = 0, ± L, ±2 L,..., but it has zero-valued
(a ) Plot of X ( e jΩT )
(b) Plot of X u (e jΩT '' ) showing double
periodicity for L = 2, T '' = T / 2
samples in between (from the upsampling operation)
The Fourier transform of xu [n] is simply:
(c ) DTFT of desired signal with
| Ω |≤ 2π FN
⎧(2 / T ) X a ( jΩ)
X i ( e jΩT '' ) = ⎨
0
2π FN <| Ω |≤ π / T ''
⎩
can obtain results of ( c) by applying ideal
X u (e jω ) = X (e jω L )
X u (e
j ΩT ''
) = X (e
j ΩT '' L
) = X (e
j ΩT
)
lowpass filter with gain L (to restore amplitude)
Thus X u (e jΩT '' ) is periodic with two periods, namely
and cutoff frequency 2π FN = π / T , giving:
with period 2π / L, due to upsampling) and 2π due to being a digital signal
⎧(1 / T '') X (e jω L ) 0 ≤| ω |< π / L
X i ( e jω ) = ⎨
0
π / L ≤| ω |≤ π
⎩
| ω |< π / L
⎧L
H i ( e jω ) = ⎨
⎩ 0 π / L ≤| ω |≤ π
133
134
SR Conversion by Non-Integer Factors
Interpolation
• T’=MT/L => convert rate by factor of M/L
• need to interpolate by L, then decimate by M (why can’t
it be done in the reverse order?)
Original signal, x[n], at sampling period, T ,
is first upsampled to give signal xu [n] with
sampling period T '' = T / L
lowpass filter removes images of original
spectrum giving:
Lowpass
Filter
xi [ n] = xa (nT '') = xa ( nT / L)
Interpolation
LPF
Decimation
LPF
need to combine specifications of both LPFs and
implement in a single stage of lowpass filtering
• can approximate almost any rate conversion with appropriate values of L and M
135
• for large values of L, or M, or both, can implement in stages, i.e., L=1024, use
L1=32 followed by L2=32
136
Summary of DSP-Part II
• digital filtering provides a convenient way of processing
signals in the time and frequency domains
• can approximate arbitrary spectral characteristics via
either IIR or FIR filters, with various levels of
approximation
• can realize digital filters with a variety of structures,
including direct forms, serial and parallel forms
• once a digital signal has been obtain via appropriate
sampling methods, its sampling rate can be changed
digitally (either up or down) via appropriate filtering and
decimation or interpolation
137
23