1.5 Equations of Lines and Planes in 3-D
advertisement

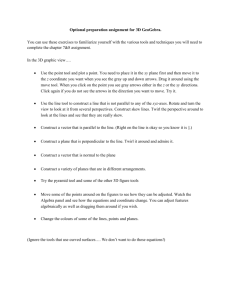
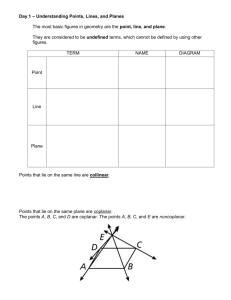
40 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.16: Line through P0 parallel to ! v 1.5 Equations of Lines and Planes in 3-D Recall that given a point P = (a; b; c), one can draw a vector from the origin to P . Such a vector is called the position vector of the point P and its coordinates are ha; b; ci, the same as P . Position vectors are usually denoted ! r. In this section, we derive the equations of lines and planes in 3-D . We do so by …nding the conditions a point P = (x; y; z) or its corresponding position vector ! r = hx; y; zi must satisfy in order to belong to the object being studied (line or plane). 1.5.1 Lines And Line Segments In 3-D, like in 2-D, a line is uniquely determined when one point on the line and the direction of the line are given. In this section, we assume we are given a point P0 = (x0 ; y0 ; z0 ) on the line and a direction vector ! v = ha; b; ci. Our goal is to determine the equation of the line L which goes through P0 and is parallel to ! v. De…nition 65 a, b, and c are called the direction numbers of the line L. Let P (x; y; z) be an arbitrary point on L. We wish to …nd the conditions P must satisfy to be on the line L. 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 41 Vector Equation Consider …gure 1.16. We see that a necessary and su¢ cient condition for the ! point P to be on the line L is that P0 P be parallel to ! v . This means that there exists a scalar t such that ! P0 P = t! v ! ! Let r be the position vector of P and r be the position vector of P . Then, 0 0 ! P0 P = ! r Thus, we obtain ! r That is ! r0 ! r0 = t! v ! r =! r0 + t! v (1.9) De…nition 66 Equation 1.9 is known as the vector equation of the line L. The scalar t used in the equation is called a parameter. The parameter t can be any real number. As it varies, the point P moves along the line. When t = 0, P is the same as P0 . When t > 0, P is away from P0 in the direction of ! v and when t < 0, P is away from P0 in the direction opposite ! v . The larger t is (in absolute value), the further away P is from P0 . Parametric Equations If we switch to coordinates, equation 1.9 becomes hx; y; zi = = hx0 ; y0 ; z0 i + t ha; b; ci hx0 + at; y0 + bt; z0 + cti Two vectors are equal when their corresponding coordinates are equal. Thus, we obtain 8 < x = x0 + at y = y0 + bt (1.10) : z = z0 + ct De…nition 67 Equation 1.10 is known as the parametric equation of the line L. Symmetric Equations If we solve for t in equation 1.10, assuming that a 6= 0, b 6= 0, and c = 6 0 we obtain x x0 y y0 z z0 = = (1.11) a b c De…nition 68 Equation 1.11 is known as the symmetric equations of the line L. 42 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Remark 69 Equation 1.11 is really three equations x x0 y y0 x0 z (1.12) z0 c z = a y0 b = b x y = a z0 c In the case one of the direction numbers is 0, the symmetric equation simply becomes the equation from 1.12 which does not involve the direction number being 0. The variable corresponding to the direction number being 0 is simply set to the corresponding coordinate of the given point. For example, if a = 0 then the symmetric equations are x y0 y = x0 z z0 = c b Examples Example 70 Find the parametric and symmetric equations of the line through P ( 1; 4; 2) in the direction of ! v = h1; 2; 3i The parametric equations are 8 < x= 1+t y = 4 + 2t : z = 2 + 3t The symmetric equations are x+1= y 4 2 = z 2 3 Example 71 Find the parametric and symmetric equations of the line through P1 (1; 2; 3) and P2 (2; 4; 1). First, we need to …nd the direction vector. Since the line goes through P1 and ! P2 , the vector P1 P2 will be parallel to the line. ! P1 P2 = h1; 2; 2i Using equation 1.10, we get 8 < x=1+t y = 2 + 2t : z = 3 2t If we solve for t, we get x 1= y 2 2 = z 3 2 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 43 Equation of a Line Segment As the last two examples illustrate, we can also …nd the equation of a line if we are given two points instead of a point and a direction vector. Let’s derive a formula in the general case. Suppose that we are given two points on the line ! P0 = (x0 ; yo ; z0 ) and P1 = (x1 ; y1 ; z1 ). Then P0 P1 = hx1 x0 ; y1 y0 ; z1 z0 i ! is a direction vector for the line. Using P0 for the point and P0 P1 for the direction vector, we see that the parametric equations of the line are 8 < x = x0 + t (x1 x0 ) y = y0 + t (y1 y0 ) : z = z0 + t (z1 z0 ) This is usually written di¤erently. If we distribute t and factor di¤erently, we get 8 < x = (1 t) x0 + tx1 y = (1 t) y0 + ty1 (1.13) : z = (1 t) z0 + tz1 When t = 0, we are at the point P0 and when t = 1, we are at the point P1 . So, if t is allowed to take on any real value, then this equation will describe the whole line. On the other hand, if we restrict t to [0; 1], then this equation describes the portion of the line between P0 and P1 which is called the line segment from P0 to P1 . Example 72 Find the equation of the line segment from P0 = (1; 2; 3) to P1 (2; 4; 1). Using equation 1.13 we get 8 < x = (1 t) 1 + 2t y = (1 t) 2 + 4t with t 2 [0; 1] : z = (1 t) 3 + t Intersecting Lines, Parallel Lines Recall that in 2-D two lines were either parallel or intersected. In 3-D it is also possible for two lines to not be parallel and to not intersect. Such lines are called skew lines. Two lines are parallel if their direction vectors are parallel. If two lines are not parallel, we can …nd if they intersect if there exists values of the parameters in their equations which produce the same point. More speci…cally, if the …rst ! line has equation ! r0 + t! v and the second line has equation R0 + s! u then they ! will intersect if there exists a value for t and s such that ! r0 + t! v = R0 + s! u. Also, when two lines intersect, we can …nd the angle between them by …nding the smallest angle between their direction vectors (using the dot product). Finally, two lines are perpendicular if their direction vectors are perpendicular. 44 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Remark 73 You will note that we used a di¤ erent letter for the parameter in each equation because it may be a di¤ erent value of the parameter which will produce the same point in each equation. We illustrate this with some examples. Example 74 Let L1 be the line through (1; 6; 2) with direction vector h1; 2; 1i and L2 be the line through (0; 4; 1) with direction vector h2; 1; 2i. Determine if the lines are parallel, if they intersect or if they are skew. If they intersect, …nd the point at which they intersect. For the lines to be parallel, their direction vectors would have to be parallel, that is there would have to exist a constant c such that h1; 2; 1i = c h2; 1; 2i Which would imply 8 < 1 = 2c 2=c : 1 = 2c Which has no solution. So, the lines are no parallel. We now derive the equation of each line. – For L1 – For L2 8 < x=1+t y = 6 + 2t : z =2+t 8 < x = 2s y =4+s : z = 1 + 2s The line will intersect if we can solve 8 1 + t = 2s < 6 + 2t = 4 + s : 2 + t = 1 + 2s Equation 1 gives t = 2s 1 If we substitute in equation 2, we get 6 + 2t = 6 + 2 (2s 6 + 4s 4+s 1) = 4+s 2 = 4+s 3s = 12 s = 4 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 45 Since we had t = 2s 1 this implies that t = 7. We need to verify that these values also work in equation 3. Replacing s and t by their values gives us 2+7 = 1 + 2 (4) 9 = 9 So, the two lines intersect. To …nd the point of intersection, we can use the equation of either line with the value of the corresponding parameter. If we use L1 , the parameter is t and the value of t which gives the point of intersection is t = 7. Thus, the point of intersection is 8 x=1+7 < y = 6 + 2 (7) : z =2+7 That is 8 < x=8 y=8 : z=9 Example 75 Find the angle between the two previous lines. Their direction vectors are ! u = h1; 2; 1i and ! v = h2; 1; 2i. The smallest angle between these vectors is ! u ! v = cos 1 ! ! kukk v k = cos 1 = cos 1 2+2+2 p p 6 9 6 p 3 6 35:26 Example 76 Find the points at which L1 in the example above intersects with the coordinate planes. The parametric equations of L1 are 8 < x=1+t y = 6 + 2t : z =2+t Intersection with the xy-plane. On the xy-plane, z = 0. If we replace in the equation of L1 , we get t = 2. This allows us to …nd x and y. x = 1 2 = 1 and y = 6+2 ( 2) = 10. Thus, L1 intersect the xy-plane at ( 1; 10; 0). Intersection with the xz-plane. On the xz-plane, y = 0. Using the same technique as above, we get 0 = 6 + 2t or t = 3. Thus, x = 1 + 3 = 4 and z = 2 + 3 = 5. Thus L1 intersects the xz-plane at (4; 0; 5). 46 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE Figure 1.17: Plane determined by a point and its normal Intersection with the yz-plane. On the yz-plane, x = 0. Thus, 0 = 1 + t or t = 1. This gives us y = 6 + 2 ( 1) = 8 and z = 2 1 = 1. It follows that L1 intersects the yz-plane at (0; 8; 1). Summary for Lines 1. Be able to …nd the equation of a line given a point and a direction or given two points. 2. Be able to tell if two lines are parallel, intersect or are skewed. 3. Be able to …nd the angle between two lines which intersect. 4. Be able to …nd the points at which a line intersect with the coordinate planes. 1.5.2 Planes Plane determined by a point and its normal A plane is uniquely determined given a point on the plane and a vector perpendicular to the plane. Such a vector is said to be normal to the plane. To help visualize this, consider …gure 1.17. Given a point P0 = (x0 ; y0 ; z0 ) and a ! normal ~n = ha; b; ci to a plane, a point P = (x; y; z) will be on the plane if P0 P is perpendicular to ~n that is ! ! n P0 P = 0 (1.14) 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 47 This is known as the vector equation of a plane. Switching to coordinates, we get ha; b; ci hx a (x x0 ; y x0 ) + b (y y0 ; z z0 i = y0 ) + c (z z0 ) 0 = 0 We usually write this as ax + by + cz + d = 0 (1.15) where d = ax0 by0 cz0 . This is known as the scalar equation of a plane. It is also the equation of a plane in implicit form. Remark 77 Note that when we know the scalar equation of a plane, we automatically know its normal; it is given by the coe¢ cients of x, y, and z. Remark 78 A plane in 3D is the analogous of a line in 2D. Recall that a normal to the line ax + by + c = 0 in 2D is ha; bi. Similarly, a normal to the plane ax + by + cz + d = 0 is ha; b; ci. Example 79 The normal to the plane 3x + 2y z = 10 is h3; 2; 1i. Example 80 The scalar equation of a plane through (1; 2; 3) with normal h2; 1; 4i is 2 (x 1) + 1 (y 2) + 4 (z 3) = 0 2x + y + 4z 16 = 0 Plane determined by three points If instead of being given a point and the normal, we are given three non-colinear ! ! points P1 , P2 , and P3 , we form the vectors P1 P2 and P1 P3 . The cross product ! ! ! ! P1 P2 P1 P3 is a vector perpendicular to both P1 P2 and P1 P3 and therefore perpendicular to the plane. We can then use one of the point, the vector obtained from the cross product to derive the equation of the plane. Example 81 Find the equation of the plane through the points P1 (0; 1; 1), P2 (1; 0; 1) and P3 (1; 3; 1). A normal to the plane is ! P1 P 2 ! P 1 P3 = = = ! ! i j 1 1 1 4 ! ! 2 i +2j h2; 2; 3i ! k 0 2 ! 3k 48 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE A point P (x; y; z) is on the plane if ! P1 P hx; y ! P1 P2 1; z ! P1 P3 = 1i h2; 2; 3i = 2x + 2 (y 1) 3 (z 2x + 2y 0 0 1) = 0 3z + 1 = 0 Parallel Planes, Intersecting Planes Two planes are parallel if and only if their normals are parallel. If two planes ! and p with normal n ! are not parallel, then the angle p1 with normal n 1 2 2 between them is de…ned to be the smallest angle between their normals that is the angle with the non-negative cosine. In other words, = cos 1 ! n !j jn 1 2 ! !k kn1 k kn 2 Example 82 Find the angle between the planes p1 : x + y + z p2 : x 2y + 3z 1 = 0. Find their intersection. (1.16) 1 = 0 and ! = h1; 1; 1i and the normal to p is n != Angle: The normal to p1 is n 1 2 2 h1; 2; 3i. Therefore, the angle between them is = cos 1 = cos 1 = cos 1 ! n !j jn 1 2 ! !k kn1 k kn 2 2 p p 3 14 2 p 42 72 Intersection: When two planes are not parallel, they intersect in a line. To …nd the equation of a line, we need a point and a direction. The ! and n !. Thus, it can direction of the line will be perpendicular to both n 1 2 ! ! be found with n1 n2 . ! n 1 ! n 2 = = ! ! ! i j k 1 1 1 1 2 3 ! ! ! 5i 2j 3k = h5; 2; 3i We also need a point on the line. For this, we can use the equations of the planes. To be on the line, a point must belong to the two planes. However, that gives us only two equations and we have three unknowns. So, we can 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 49 also …x one of the variables. For example, if we set z = 0, we will be looking for the point on the line which intersects the two planes and also the xy-plane. This is what we will do. So, we must solve x+y =1 x 2y = 1 The solutions are x = 1 and y = 0. So, (1; 0; 0) is a point on the line. Thus, the parametric equations of the line are 8 < x = 1 + 5t y = 2t : z = 3t Summary for Planes In addition, using the material studied so far, you should be able to do the following: 1. Be able to …nd the equation of a plane given a point on the plane and a normal to the plane. 2. Be able to …nd the equation of a plane given three points on the plane. 3. Be able to …nd the equation of a plane through a point and parallel to a given plane. 4. Be able to …nd the equation of a plane through a point and a line not containing the point. 5. Be able to tell if two planes are parallel, perpendicular. 6. Be able to …nd the angle between two planes. 7. Be able to …nd the traces of a plane. 8. Be able to …nd the intersection of two planes. Make sure you can do the above before attempting the problems. 1.5.3 Problems Do the following problems. 1. Find the parametric equations for the line through the point P = (3; 4; 1) ! ! ! parallel to i + j + k . 2. Find the parametric equations for the line through the point P = ( 2; 0; 3) and Q = (3; 5; 2). 50 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 3. Find the parametric equations for the line through the origin parallel to ! ! 2j + k. 4. Find the parametric equations for the line through the point (1; 1; 1) parallel to the z-axis. 5. Find the parametric equations for the line through the point (0; 7; 0) perpendicular to the plane x + 2y + 2z = 13. 6. Find the parametric equations for the x-axis. 7. Find the equation of the line segment from (0; 0; 0) to 1; 1; 32 . 8. Find the equation of the line segment from (1; 0; 0) to (1; 1; 0). ! 9. Find the equation of the plane through P = (0; 2; 1) normal to 3 i ! ! 2j k. 10. Find the equation of the plane through P = (1; 1; 1), Q = (2; 0; 2) and R = (0; 2; 1). 11. Find8the equation of the plane through P = (2; 4; 5) perpendicular to the < x=5+t y = 1 + 3t line : z = 4t 8 8 < x = 1 + 2t < x=2+s y = 2 + 3t and y = 4 + 2s . 12. Find the point of intersection of the lines : : z = 3 + 4t z = 1 4s Then, …nd the plane determined by these two lines. 8 < x= 1+t y = 2 + t and 13. Find the plane determined by intersecting the lines : z=1 t 8 < x = 1 4s y = 1 + 2s : z = 2 2s 14. Find the plane through P0 = (2; 1; 1) perpendicular to the line of intersection of the planes 2x + y z = 3 and x + 2y + z = 2. 8 < x = 4t y = 2t 15. Find the distance from the point P = (0; 0; 12) to the line : z = 2t 8 < x = 2 + 2t y = 1 + 6t 16. Find the distance from the point P = (2; 1; 3) to the line : z=3 17. Find the distance from the point P = (2; 3; 4) to the plane x + 2y + 2z = 13. 1.5. EQUATIONS OF LINES AND PLANES IN 3-D 18. Find the distance from the point P = (0; 1; 1) to the plane 4y + 3z = 51 12. 19. Find the distance between the two planes x+2y +6z = 1 and x+2y +6z = 10. 20. Find the angle between the two planes 2x+2y+2z = 3 and 2x 2y z = 5. 8 < x=1 t y = 3t and the plane 21. Find the point of intersection between the line : z =1+t 2x y + 3z = 6. 22. Determine whether the lines taken two at a time are parallel, intersect or skew. If they intersect, …nd their point of intersection. 8 < x = 3 + 2t y = 1 + 4t L1 : : z=2 t 8 < x = 1 + 4s y = 1 + 2s L2 : : z = 3 + 4s 8 < x = 3 + 2r y =2+r L3 : : z = 2 + 2r 8 < x = 1 + 2t y = 1 t meet the coordinate 23. Find the points in which the line : z = 3t planes. 24. In the plane, the slope-intercept form of the equation of a line is y = mx+b where m is the slope and b the y-intercept. Show that the vector (1; m) is a direction vector of the line y = mx + b. (hint: Pick 2 points P1 and P2 ! on the line the vector P1 P2 is a direction vector for the line). 25. Another form of the equation of a line in the plane is ax + by + c = 0. Using a similar approach as the one in the previous problem, show that (b; a) is a direction vector for such a line. What is a vector perpendicular to the line? change in y 26. For a line in space, the notion of slope ( ) does not carry over change in x because there are three variables changing, it is replaced by the direction vector. However, if a line is one of the coordinate planes, then there are only two variables involved. If the line is in the xy-plane, then only x and y are changing. If a line is in the xz-plane, then only x and z are changing. If a line is in the yz-plane, then only y and z are changing. Find the direction vector of a line having its slope equal to m in each of the coordinate planes. (hint: use problem ??). 52 CHAPTER 1. VECTORS AND THE GEOMETRY OF SPACE 27. Let L be the line that passes through the points Q and R and let P be a point not on L. Show that the distance between P and L is ! ! QR QP ! QR . Show that this agrees with the formula in the book for the distance be! PS ! v tween a point S and a line through P parallel to ! v which is . vk k! 28. Let P be a point not on the plane determined by the points Q, R and S. Show that the distance between P and the plane is ! QR ! ! QS QP ! ! QR QS . 29. Show that the distance from the point P1 = (x1 ; y1 ) to the line ax+by+c = 1 +cj 0 is jaxp1a+by . 2 +b2 30. Show that the distance from the point P1 = (x1 ; y1 ; z1 ) and the plane 1 +by1 +cz1 +dj . ax + by + cz + d = 0 is jaxp a2 +b2 +c2 31. Assuming d1 6= d2 , explain why the two planes given by ax+by+cz+d1 = 0 and ax + by + cz + d2 = 0 are parallel, then compute the distance between them.