212
advertisement

Guiding Global Placement with Wire Density
Kalliopi Tsota, Cheng-Kok Koh and Venkataramanan Balakrishnan
School of Electrical and Computer Engineering, Purdue University, West Lafayette, IN 47907–2035
{ktsota, chengkok, ragu}@ecn.purdue.edu
Abstract—This paper presents an efficient technique for the
estimation of the routed wirelength during global placement
using the wire density of the net. The proposed method identifies
congested regions of the chip and incorporates the model of
the routed wirelength into the objective function in order to
effectively alleviate these regions from congestion. The method
is integrated in the analytical placement framework and the
two-level structure improves the scalability of the placer and
speeds up the algorithm. The proposed analytical placer provides
the best-so-far average routed wirelength in the IBM version2
benchmark suite.
I. I NTRODUCTION
The placement of cells on the chip area is a difficult
task in VLSI physical design and the minimization of total
routed wirelength is one of the fundamental goals. Moreover,
routability is a key measurement of quality. A placed design
that results in congested regions on the chip often leads to
routing detours and may result in a higher routed wirelength.
In the worst case, it may even not allow successful routing.
Several approaches have been used in the past to address
the issue of routability. To reduce congestion, in [1] the author
modeled the routing supply versus routing demand and incorporated the routing congestion into the objective function of
simulated annealing. In [2], [3] the routability of a placement
solution was improved using allocation of the white space
in congested region during global placement. In [4], [5] the
congestion-driven placement was based on the inflation of cells
that were located in the congested regions. In [6] the authors
made use of linear programming to resolve the conflicts of
multiple congested regions. In [7], [8], Rent’s rule was used to
estimate the routing demand. In [9] the cell placement problem
was formulated as a minimal-cost maximum-flow problem.
The algorithm proposed in [10] obtained a model for the wire
distribution on the chip, using the wire density of the net.
The paper presents a routability-driven global placement
flow. The global placement is performed in a two-level framework and a wirelength estimation technique is used to guide
the entire global placement process. At the first level, the
clusters are placed on the chip area using an effective global
placement algorithm. Then, the clusters are assigned to the
updated positions, obtained from the placement algorithm, and
every cell of the original netlist is located at the center of its
corresponding cluster. At the second level, the cells of the
original netlist are placed on the chip area to further reduce
overlap. An efficient routed wirelength estimation method is
used to determine the wirelength inside the regions of the
chip and guide the placement of the clusters at both levels.
The main contributions of the paper are: (i) The estimation
978-1-4244-2820-5/08/$25.00 ©2008 IEEE
of wirelength in a region; and (ii) The balancing of the cell
density and the wirelength across the placement regions.
In this paper, the wire density of a net is defined as the ratio
of the bounding-box perimeter over the bounding-box area of
the net. If the bounding box of a net overlaps with a region,
it adds to the total wirelength within the region by a factor
equal to the product of the wire density of the net and the
overlap area between the region and the bounding box of the
net. The proposed method makes use of the wire density of
a net to estimate the wire congestion at different regions of
the chip area during the global placement. The objective is to
reduce the wire congestion by modifying the cell density and,
at the same time, distributing the wire uniformly inside the
regions of the chip. The regions characterized as congested
are assigned to lower cell density, whereas the uncongested
regions are allowed to have higher cell density.
During the global placement phase, the placement area is
divided into an array of uniform rectangular global bins. The
wire distribution is independent of the number of wires that
cross the boundary of the bin and therefore not affected by
the bin structure. At the same time, it is not easy to calculate
the wirelength inside the bin, as there are nets that either
have multiple pins or do not reside entirely inside the bin.
The technique for the estimation of wirelength inside the
bin is based on the fact that the wirelength of a multi-pin
net at the interior of a bin is determined from the overlap
area between the two and the wire density of the net. The
wirelength inside the bin is calculated and incorporated into
the objective function. Therefore, the wire density of the net
guides the placement process as the tool of estimating the
wirelength. By penalizing the bins having wirelength higher or
lower than the average, the formulation provides a placement
of cells that does not contain congested regions and obtains
shorter average routed wirelength.
The placer, guided by wire density to estimate wirelength,
obtains shorter average routed wirelength compared to the existing placement tools. The improvement is between 2.2% and
14.6% compared to RUDY [10], APlace [11], CHKS+WSA
[12], mPL-R+WSA [13], mPL6 [14] and ROOSTER [15], for
the circuits of the IBM version2 benchmark suite. The rest of
the paper is organized as follows: The two-level framework
of the algorithm is covered in Section II. Section III gives the
analytical placement formulation. In Section IV, the estimation
technique for the routed wirelength is analyzed. Section V
includes the implementation details and Section VI shows the
experimental results. Section VII concludes the paper.
212
II. A T WO -L EVEL FRAMEWORK
The placement algorithm presented in the paper is performed in a two-level framework. The first level deals with a
netlist of clusters. Initially, the cluster locations are randomly
assigned. The algorithm updates their locations to remove
cluster overlap and uniformly distribute wirelength across the
chip area. At the second level, the cells of the original netlist
are assigned to the locations obtained from the first level
(each cell is located at the center of its corresponding cluster),
and the placement algorithm places the cells on the chip to
further reduce cell overlap and uniformly distribute wirelength.
Therefore, the wirelength estimation technique is incorporated
in the global placement and applied in both levels of the twolevel framework. The two-level framework of the placer can
be easily extended to a multilevel framework.
III. G LOBAL PLACEMENT
The input to the global placer is a circuit netlist, where the
vertices represent the cells and the hyperedges represent the
nets in the circuit. The global placement can be applied to the
original netlist, at the second level of the two-level framework,
or the netlist of clustered cells, at the first level of the two-level
framework. As the goal of a global placement is to determine
approximate locations of the cells, it is not necessary to
enforce the non-overlap constraints strictly. Instead, a popular
formulation is to evenly distribute the cell density throughout
the entire chip. To facilitate such a formulation, the placement
area is divided into uniform bins. Let (x,y) denote the vector of
the cell coordinates, W L(x,y) the wirelength of the placement
and SDg (x,y) the cell density inside bin g. If the goal is to
equalize the cell area in every bin and D is the average cell
area, SDg (x,y) = D. The constrained non-linear optimization
problem formulated in APlace [11], [16] is
min W L(x, y)
subject to SDg (x, y) = D, ∀g.
The problem is usually solved as a sequence of unconstrained optimization problems and the cell density of the bin
is included into the objective function as a weighted penalty
1 2
·
min W L(x,y) +
(SDg (x,y) − D) ,
(1)
2·u g
where u monotonically decreases in the sequence. The wirelength WL is typically evaluated using HPWL, which is a
convex function but not strictly convex. As such, it cannot
be effectively minimized. Also, HPWL is not differentiable.
Being neither strictly convex nor differentiable, the expression
is not amenable to Newton-type methods. The log-sum-exp
(LSE) function [17] is often used to capture the linear HPWL.
This is a continuous, differentiable function and has been
extensively used to approximate and smooth the HPWL.
This paper considers a different approximation function for
the HPWL. The two-variable CHKS smoothing function is
called recursively to approximate the maximum of the pin
coordinates within a net. The negative of the same function
approximates the minimum. The CHKS function, as presented
in [12], [18] constitutes an alternative smoothing method to
the HPWL, and it is as effective as the LSE approximation in
terms of wirelength minimization.
A. Wirelength formulation
The half-perimeter wirelength of a net e ∈ E is expressed
HP W Le = max{xi } − min{xi } + max{yi } − min{yi }. (2)
i∈e
i∈e
i∈e
i∈e
The total HPWL is
HP W L =
HP W Le .
e∈E
The CHKS function [12] is used to smooth the two-variable
maximum function
(x1 − x2 )2 + α2 + x1 + x2
,
CHKS(x1 , x2 ) =
2
where α > 0 is the smoothing parameter. The multi-variable
maximum function, proposed in [18] and used in [12], is
obtained by recursive calls to the two-variable maximum
function
max {x} = max {max {x(1) }, max {x(2) }},
where x(1) , x(2) , is a disjoint partitioning of x. Then, min {x}
was obtained from max {x} approximation as
min{x} = − max{−x}.
This paper follows the definition given in [12]: For a convex
function f : R2 → R define ∀1 ≤ i ≤ n − 1, the function
fi,i+1 : Rn → R by fi,i+1 (x) = f (xi , xi+1 ), and ∀1 ≤ i <
j ≤ n, the function fi,i : Rn → R by fi,i (x) = xi . Moreover,
∀1 ≤ i < j ≤ n and j − i + 1 > 2, let fi,j : Rn → R be
defined by
fi,j (x) = f (fi,k (x), fk+1,j (x)),
where k = i+j
2 .
Therefore, the multi-variable maximum and minimum functions are smoothed and approximated by f1,n which, for sake
of simplicity, is denoted as f in the rest of the paper. The
CHKS function is convex and differentiable, therefore can
be handled by general optimization algorithms. Then, the
HP W Le (2) is expressed as
HP W Le = fx,e + fy,e ,
where fx,e approximates maxi∈e {xi } − mini∈e {xi } and is
obtained by recursive calls to CHKS for the maximum and
minimum x-coordinates of the pins of net e. In the same way,
fy,e approximates maxi∈e {yi } − mini∈e {yi }.
213
B. Cell density formulation
The cell potential is a rectangular function that is smoothed
by the Bell-shaped function as in APlace [11]. Let wv , hv be
the width, height of cell v and wg , hg be the width, height of
bin g. If cell v is located at a horizontal distance dx from the
center of bin g, then the x-overlap between g and v.
⎧
wv +2·wg
2
⎪
],
⎨ 1 − a · dx if dx ∈ [0,
2
2
w
+4·w
w
+2·w
w +4·w
v
g
px (g, v) =
) if dx ∈ [ v 2 g , v 2 g ],
b · (dx −
⎪
⎩ 0 otherwise. 2
where
a=
4
(wv +2·wg )·(wv +4·wg ) , b
=
Bounding box of
net B
Bin
g2
Bounding box
of net A
Bin
g1
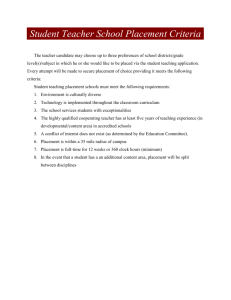
Fig. 1. The global bins g1 and g2 are shown in light gray. The bounding
boxes of nets A and B overlap bins g1 and g2 respectively. The dark lines
represent the routed wirelength of each net.
2
wg ·(wv +4·wg ) ,
so that the function is continuous when dx = w2v + wg .
Similarly, a smoothed cell potential function is defined for
the y-direction. The potential function SDg has the form
SDg (x,y) =
Cv · px (g, v) · py (g, v),
v
where γ is a user defined constant that determines how
much Dg (x,y) deviates from the average D. The optimization
problem (1) can now be rewritten as
where Cv is a normalization factor such that
Av =
Cv · px (g, v) · py (g, v).
min HP W L(x,y) +
g
In other words, each cell has a total area potential equal to its
area.
IV. E STIMATION OF ROUTED WIRELENGTH
A highly congested region in the placement may result
in routing detours around the region and a larger routed
wirelength. Congested areas may also degrade the performance
of the router and even result in an unroutable design. In order
to obtain a global placement that is eventually routable without
increasing the runtime, it is important to efficiently evaluate the
congestion and identify congested regions of the design. That
rules out performing actual routing to determine wirelength
and routing congestion, as routing itself is a difficult problem.
During the global placement stage, the path that will be
used by the router to route the nets remains unknown and
the routing pattern has not yet been obtained. In this paper,
the routed-wirelength within a region of the chip is estimated
based on the bounding box of each net that overlaps the region.
In order to identify the congested regions, it is necessary to
determine the wirelength within each one of these regions. For
a two-pin net, the router will connect the pins by following the
shortest path between them. However, the path the router will
follow in the case of a multi-pin net is not as easy to predict.
There are possibly many paths that all have the same minimum
length for the router to follow. Moreover, the routing paths of
the other nets in the region determine the routing path of the
net.
Let Sdg (x,y) denote the estimated routed wirelength inside
the bin and avgd (x,y) the average estimated routed wirelength.
Then Dg (x,y) is a function of the estimated wirelength inside
bin g and
Dg (x,y) = (1 + γ · (1 −
Sdg (x,y)
)) · D,
avgd (x,y)
1 2
·
(SDg (x,y) − Dg (x,y)) ,
2·u g
where the average cell density D used in APlace has now been
replaced by Dg (x,y).
From (3), if Sdg (x,y) = avgd , Dg (x,y) = D. If
Sdg (x,y) < avgd , the estimated routed wirelength inside
bin g is less than the average and the cell density allowed
inside the bin is higher. Similarly, if Sdg (x,y) > avgd , the
estimated routed wirelength is more than the average and the
cell density allowed inside the bin is lower. Having estimated
the wirelength inside each global bin, the bins that have high
(low) congestion are assigned a lower (higher) cell density.
The wirelength of a net can be approximated by the HPWL.
Since there is a strong correlation between the HPWL and the
routed wirelength of a net, in the case of a net being entirely
inside a global bin, the routed wirelength can be calculated
satisfactorily. However, in the case of a net being only partially
inside the bin, the routed wirelength inside the bin cannot be
determined using the HPWL of the net. There are many paths
outside the bin that connect the pins of the net and the router
may not follow a path passing through the bin.
An example is illustrated in IV, where the bounding box
of net A partially overlaps the global bin g1 (shown in gray)
and the router follows a path (shown with a solid line) that is
located inside the bin. The bounding box of net B is routed
across the global bin g2 . For net B, the path is located outside
the bin. Either one of the two cases may occur and, therefore,
the exact wirelength cannot be calculated in advance. The wire
density of a net is defined
dn (x,y) =
HP W Ln
,
Arean
(4)
where
(3)
HP W Ln = max{xi } − min{xi } + max{yi } − min{yi }
i∈e
214
i∈e
i∈e
i∈e
is the HPWL of the bounding box of the net e, and
Global bin
Arean = (max{xi } − min{xi }) · (max{yi } − min{yi })
i∈e
i∈e
i∈e
y_top
i∈e
is the area of the bounding box of the net.
The algorithm proposed in [10] estimates the routing dedem
(x, y) as the superposition of the rectangle funcmand Drout
tions of all nets, weighted by the wire density of each net. The
rectangle function of a net is equal to one for (x, y) inside the
bounding box of the net and equal to zero otherwise. The
algorithm adapts the demand to the supply at each position;
essentially, the algorithm seeks a placement solution where
the wire density is uniform across the chip. In this paper,
however, the formulation uses the wire density of the net only
to determine the wirelength inside a global bin and, therefore,
it is the wirelength within the bin that is incorporated into
the objective function, not the wire density. In addition, the
optimization is independent of the shape of the bounding box
of the net and the wirelength is independent of the routing
model following the placement.
Taking into consideration the formula for the wire density
of a net (4), it is possible to estimate the routed wirelength
inside bin g for every possible configuration. The estimated
routed wirelength is
dg,e (x,y) = dn (x,y) · Ag,e (x,y),
where dn (x,y) is the wire density of net e and Ag,e (x,y) is
the overlap area between bin g and the bounding box of net e.
The total wirelength inside bin g is the sum of the wirelength
of each net which overlaps the bin either fully or partially.
Thus
dg,e (x,y).
(5)
Sdg (x,y) =
y_bot
x_left
Fig. 2. The global bins are shown in light gray (the bin under consideration
in darker gray) and the bounding box of the net which overlaps with the global
bin is shown in black. Five out of the many different possible configurations
are depicted here.
Following the analysis performed in Section III, let fx,e
be the smoothed function that approximates maxi∈e {xi } −
mini∈e {xi } and fy,e be the smoothed function that approximates maxi∈e {xi } − mini∈e {xi }. The wire density of a net
is written as
dn,e (x,y) =
e
The average bin wirelength is
avgd (x,y) = avgg {Sdg (x,y)}.
Therefore
Dg (x,y) = (1 + γ · (1 −
A. Function smoothing
Ag,e = (horiz overlap) · (vertical overlap),
horiz overlap = CHKS(xright , min xi )+
where
Sdg (x,y) =
fx,e (x,y) + fy,e (x,y)
· Ag,e (x,y)).
(
fx,e (x,y) · fy,e (x,y)
e
Also,
fx,e (x,y) + fy,e (x,y)
avgd (x,y) = avgg {
· Ag,e (x,y))}.
(
fx,e (x,y) · fy,e (x,y)
e
∂fi,j (x)
∂fi,j (x) ∂fi,k (x) ∂fi,j (x) ∂fk+1,j (x)
=
·
+
·
,
∂xl
∂fi,k
∂xl
∂fk+1,j
∂xl
i∈e
+CHKS(−xright , − min xi ),
i∈e
vertical overlap = CHKS(max yi , min yi )+
i∈e
Sdg (x,y)
)) · D,
avgd (x,y)
Most Newton-like optimization solvers require evaluations
of the function value f(x) and its gradient g(x) =
(x) ∂f (x)
∂f (x) T
[ ∂f
∂x1 , ∂x2 , ..., ∂xn ] . To calculate the gradient of f(x)
where
where k = i+j
2 and 1 ≤ l ≤ j. For i ≤ l ≤ k and CHKS
smoothing,
i∈e
+CHKS(max −yi , min −yi )
i∈e
fx,e (x,y) + fy,e (x,y)
.
fx,e (x,y) · fy,e (x,y)
The total wirelength within bin g is
Sdg (x,y) =
(dn,e (x,y) · Ag,e (x,y)).
e
The estimation of the wirelength inside the bin using the
wire density of a net, includes determining the overlap area
Ag,e (x,y). As shown in IV-A, there are different ways in
which the bounding box of a net and the bin overlap. For
example, when the bounding box of the net is located partially
inside and on the right side of the bin as illustrated in IV-A,
the overlapped area between the specified net and the bin is
calculated as
x_right
i∈e
and (xlef t , ybot ) , (xright , ytop ) are the coordinates of the bin.
To smooth the function of the estimated routed wirelength
inside bin g, Sdg (x,y), we use the recursive CHKS function.
215
∂fi,j (x)
1 ∂fi,k (x)
= ·
+
∂xl
2
∂xl
1
fi,k (x) − fk+1,j (x)
∂fi,k (x)
·
·
.
2
2
2
∂xl
(fi,k (x) − fk+1,j (x)) + alpha
To solve the unconstrained optimization problem, one needs
to calculate the gradient of Dg , dn . The gradient of Dg is
calculated as
∂Dg (x,y)
= −γ · D ·
∂xl
∂Sdg (x,y)
∂xl
∂maxd (x,y)
∂xl
,
∂Dg (x,y)
= −γ · D ·
∂yl
∂Sdg (x,y)
∂yl
∂maxd (x,y)
∂yl
.
The gradient of dn (x,y) is calculated as
∂fx,e (x,y)
∂ fx,e (x,y) + fy,e (x,y)
) = − 2 ∂xl ,
(
∂xl fx,e (x,y) · fy,e (x,y)
fx,e (x,y)
∂fy,e (x,y)
∂ fx,e (x,y) + fy,e (x,y)
∂y
)=− 2 l .
(
∂yl fx,e (x,y) · fy,e (x,y)
fy,e (x,y)
V. I MPLEMENTATION
The placement algorithm is applied in a two-level framework as explained in Section II. The global placer places the
clusters at the first level and the cells at the second level.
For this work, the clusters were obtained from the K-way
partitioning of the original circuit netlist using the publicly
available software hMetis [19]–[21]. The hMetis algorithm
performs K-way partitioning of the circuit netlist with the
objective of reducing the number of edgecuts among the
partitions. The hybrid first choice scheme in hMetis is used
for the grouping of the cells. The partitioning of the netlist is
obtained after N = 5 runs of the hMetis algorithm and the
partition with the smallest edgecut is selected. The original
netlist is clustered to a number of clusters such that the number
of cells inside each cluster is between 1% and 5% of the
number of cells in the netlist. Each cluster is shaped as a
square, with its area being equal to the sum of the areas of the
cells that belong to the cluster. The cells are confined inside
the cluster area of their corresponding cluster and the input
to the placement algorithm is the partitioning of the circuit
netlist.
At both levels of the framework, the routed wirelength
estimation technique guides the placement process. The unconstrained optimization problem is solved using L-BFGS-B,
a publicly available quasi-Newton solver with boundary constraints, as described in [22]. The implementation of the solver
is in the default mode. The two-level framework includes a
multi-grid structuresimilar to the one in [12] and the same
(SDg −Dg )2
. The initial weight of the
stopping criterion
g
density penalty is
∂SDg
∂SDg
1
xi ,yi
g |SDg − Dg | · (| ∂xi | + | ∂yj |)
+
u= ∗
∂W L
∂W L
2
xi ,yj (| ∂xi | + | ∂yj |)
(6)
∂Dg
∂Dg
1
xi ,yi
g |SDg − Dg | · (| ∂xi | + | ∂yj |)
∗
.
∂W L
∂W L
2
xi ,yj (| ∂xi | + | ∂yj |)
After the initialization, u is halved in every iteration. At the
end of the global placement, the detailed placer mPL-R+WSA
[13] is used to legalize the placement.
VI. E XPERIMENTAL RESULTS
The results are based on sixteen IBM version 2 easy
and hard benchmarks and show the impact of routabilitydriven standard-cell placement on the routed wirelength. All
experiments were performed on a 3GHz Pentium 4 CPU with
3GHz memory. Table 1 includes the routed wirelengths, as
well as the CPU times for placement compared to mPLR+WSA [13], mPL6 [14], CHKS+WSA [12], RUDY [10],
ROOSTER [15] and APlace [11]. For each placement tool, the
first column, labeled “r-WL”, shows the routed wirelength on
each benchmark after routing the placed design using Cadence
WRoute. The second column, labeled “p-CPU”, shows the
CPU times for placement.
The placement solutions of the proposed approach were
routed with CADENCE WRoute 5.3 in default configuration.
The routed wirelengths of circuits placed with mPL-R+WSA,
mPL6 and CHKS+WSA are as reported in [12] (routed
with CADENCE WRoute 5.3) and the routed wirelengths of
circuits placed with RUDY, ROOSTER and APlace (routed
with CADENCE WRoute 2.3.32) are as reported in [10].
The placement solutions obtained from the proposed approach
result in reductions in the total routed wirelength by 14.56%,
5.48%, 5.55%, 2.17%, 9.68% and 8.53%, compared to mPLR+WSA, mPL6, CHKS+WSA, RUDY, ROOSTER and APlace
respectively. Compared to RUDY, our algorithm obtained
shorter routed wirelength in 12 out of the 16 benchmarks.
In Table 1, the row labeled “r-WL%improv.” shows the improvements in the total routed wirelength obtained from our
placer over those of other placement tools.
The placement time of every placement tool is defined
as the total CPU time to perform global/detailed placement
and legalization. The placement CPU times for mPL-R+WSA,
mPL6, CHKS+WSA and APlace are obtained from our runs
of the respective executables. For our placement algorithm, the
placement CPU times also include the time to run hMetis. The
proposed algorithm results in reductions in the placement CPU
time by 52.13%, 8.29%, 45.61% and 63.50% respectively. The
CPU times for ROOSTER were not reported in [10] and are,
therefore, not included in Table 1. The CPU time for RUDY
is obtained on a 2.2 GHz AMD Athlon Opteron 248 machine
in [10]; therefore, no direct comparison with the runtime of
RUDY and ROOSTER can be made at this point.
VII. C ONCLUSION
The paper proposes a global placement flow guided by an
efficient routed wirelength estimation method. The overlap
between the bounding box of a net and a global bin, weighted
by the wire density of the net, estimates the wirelength within
the corresponding global bin and overcomes the difficulty of
determining the wirelength inside a bin for the case of multipin nets. At the same time, the two-level framework reduces
the total runtime of the placer. The result is an algorithm
that obtains the best average routed wirelenghts in the IBM
version2 benchmark suite.
216
TABLE I
ROUTABILITY R ESULTS ON IBM VS .2 S TANDARD C ELL P LACEMENT B ENCHMARKS
Proposed
mPL-R+WSA
mPL6
CHKS+WSA
RUDY
ROOSTER
APlace
r-WL p-CPU r-WL [12] p-CPU r-WL [12] p-CPU r-WL [12] p-CPU r-WL [10] p-CPU [10] r-WL [10] r-WL [10] p-CPU
(m) (s)
(m)
(s)
(m)
(s)
(m)
(s)
(m)
(s)
(m)
(m)
(s)
ibm01e 0.64 132
0.77
216
0.76
109
0.78
233
0.68
34
0.72
0.79
292
ibm01h 0.64 117
0.74
221
0.76
108
0.79
223
0.68
33
0.73
0.73
181
ibm02e 1.74 249
1.88
491
1.79
234
1.83
399
1.85
67
2.00
1.85
355
ibm02h 1.77 247
1.98
513
1.90
217
1.91
394
1.99
68
1.98
1.97
342
ibm07e 3.59 536
4.26
911
3.65
515
3.76
819
3.60
176
3.95
3.98
1324
ibm07h 3.69 496
4.36
897
4.68
503
3.70
859
3.63
183
4.09
4.14
1419
ibm08e 3.91 614
4.54
1396
4.11
630
4.12
1042
4.04
223
4.23
3.96
1485
ibm08h 3.87 574
4.45
1386
4.05
599
4.05
1088
3.96
220
4.24
3.96
1667
ibm09e 2.95 572
3.48
1105
3.19
606
3.12
1213
2.90
216
3.20
3.10
1452
ibm09h 2.96 616
3.61
1034
3.11
571
3.07
1047
2.92
211
3.21
3.10
1612
ibm10e 5.83 874
6.78
1723
6.10
876
6.44
1390
5.81
307
6.42
6.18
1535
ibm10h 5.71 793
6.69
1697
5.96
839
5.81
1292
5.78
314
6.54
6.17
4550
ibm11e 4.31 737
5.10
1304
4.56
802
4.46
1368
4.41
301
4.75
4.76
2277
ibm11h 4.33 689
5.11
1283
4.46
793
4.39
1257
4.40
308
4.72
4.82
2464
ibm12e 8.33 958
10.43
2104
8.77
1025
8.65
1606
8.43
341
9.33
8.60
4241
ibm12h 8.23 1056
10.03
2022
8.62
970
8.28
1428
8.47
345
9.28
8.81
4274
%improv.
14.56% 48.16% 5.48% 0.41% 5.55% 41.14% 2.17%
N/A
9.68%
8.53% 60.49%
ACKNOWLEDGMENT
This research was supported in part by SRC (Task ID
1822.001).
R EFERENCES
[1] C.-L. E. Cheng, “RISA: Accurate and efficient placement routability
modeling,” in Proc. IEEE/ACM International Conference on ComputerAided Design, San Jose, California, Nov. 1994, pp. 690–695.
[2] M. Wang, X. Yang, and M. Sarrafzadeh, “Congestion minimization
during placement,” IEEE Trans. Computer-Aided Design, vol. 19, pp.
1140–1148, Oct. 2000.
[3] J. Lou, T. S. Krishnamoorthy, and H. S. Sheng, “Estimating routing
congestion using probabilistic analysis,” in Proc. ACM/SIGDA International Symposium on Physical Design, Sonoma, California, Jan. 2001,
pp. 112–117.
[4] W. Hou, H. Yu, X. Hong, Y. Cai, W. Wu, J. Gu, and W. Kao, “A
new congestion-driven placement algorithm based on cell inflation,” in
Proc. Asia and South Pacific Design Automation Conference, Yokohama,
Japan, Jan. 2001, pp. 605–608.
[5] U. Brenner and A. Rohe, “An effective congestion-driven placement
framework,” in Proc. ACM/SIGDA International Symposium on Physical
Design, San Diego, California, Jan. 2002, pp. 6–11.
[6] Z. Li, W. Wu, and X. Hong, “Congestion-driven incremental placement
algorithm for standard cell layout,” in Proc. IEEE/ACM Asia and South
Pacific Design Automation Conference, Kitakyushu, Japan, Jan. 2003,
pp. 723–728.
[7] X. Yang, R. Kashner, and M. Sarrafzadeh, “Congestion estimation during
top-down placement,” IEEE Trans. Computer-Aided Design, vol. 21, pp.
72–80, Jan. 2002.
[8] B. Hu and M. Marek-Sadowska, “Congestion minimization during placement without estimation,” in Proc. IEEE/ACM International Conference
on Computer-Aided Design, San Jose, California, Nov. 2002, pp. 739–
745.
[9] M. Wang and M. Sarrafzadeh, “Modeling and minimization of routing
congestion,” in Proc. IEEE/ACM Asia and South Pacific Design Automation Conference, Yokohama, Japan, Jan. 2000, pp. 185–290.
[10] P. Spindler and F. Johannes, “Fast and accurate routing demand estimation for efficient routability-driven placement,” in Proc. Design
Automation and Test in Europe Conference, Nice, France, Apr. 2007,
pp. 1–6.
[11] A. B. Kahng and Q. Wang, “Implementation and extensibility of an
analytic placer,” IEEE Trans. Computer-Aided Design, vol. 24, pp. 734–
747, May 2005.
[12] C. Li and C.-K. Koh, “Recursive function smoothing of half-perimeter
wirelength for analytical placement,” in Proc. International Symposium
on Quality Electronic Design, San Jose, California, Mar. 2007, pp. 829–
834.
[13] C. Li, M. Xie, C.-K. Koh, J. Cong, and P. H. Madden, “Routabilitydriven placement and white space allocation,” in Proc. International
Conference on Computer-Aided Design, San Jose, California, Nov. 2004,
pp. 394–401.
[14] T. Chan, J. Cong, M. Romesis, J. R. Shinnerl, K. Sze, and M. Xie,
“mPL6: A robust multilevel mixed-size placement engine,” in Proc.
ACM/SIGDA International Symposium on Physical Design, San Fransisco, California, Apr. 2005, pp. 227–229.
[15] J. A. Roy and I. L. Markov, “Seeing the forest and the trees: Steiner
wirelength optimization in placement,” IEEE Trans. Computer-Aided
Design, vol. 26, pp. 632–644, Apr. 2007.
[16] A. B. Kahng, S. Reda, and Q. Wang, “Architecture and details of a highquality, large-scale analytical placer,” in Proc. IEEE/ACM International
Conference on Computer-Aided Design, San Jose, California, Nov. 2005,
pp. 891–898.
[17] W. Naylor, R. Donelly, and L. Sha, “Non-linear optimization system and
method for wire length and delay optimization for an automatic electric
circuit placer,” U.S. Patent 6 301 693, Oct. 09, 2001.
[18] S. Birbil, S. Fang, H. Frenk, and S. Zhang, “Recursive approximation
of the high-dimensional max function,” Department of Systems Engineering and Engineering Management SEEM, The Chinese University
of Hong Kong, HK, Tech. Rep. SEEM 2002-12, Dec. 2002.
[19] G. Karypis and V. Kumar, “Multilevel K-way hypergraph partitioning,”
IEEE Trans. VLSI Syst., vol. 11, pp. 285–300, Jan. 2000.
[20] G. Karypis, R. Aggarwal, V. Kumar, and S.Shekhar, “Multilevel K-way
hypergraph partitioning: Applications in VLSI domain,” IEEE Trans.
VLSI Syst., vol. 7, pp. 69–79, Mar. 1999.
[21] N. Selvakkumaran and G. Karypis, “Multi-objective hypergraph partitioning algorithms for cut and maximum subdomain degree minimization,” IEEE Trans. Computer-Aided Design, vol. 25, pp. 504–517, Mar.
2006.
[22] C. Zhu, R. Byrd, and J. Nocedal, “L-BFGS-B, FORTRAN routines
for large-scale bound constrained optimization,” ACM Transactions on
Mathematical Software, vol. 23, pp. 550–560, Dec. 1997.
217