Clearance of flight control laws using optimization
advertisement

Università di Siena
Clearance of flight control laws
using optimization
Andrea Garulli
Dipartimento di Ingegneria dell’Informazione, Università di Siena
garulli@dii.unisi.it
Scuola Nazionale di Dottorato SIDRA
Bertinoro – 20 Luglio 2012
Università di Siena
1
Scope of the presentation
What this talk is about:
⇒ A control engineering perspective on the validation of flight control systems
Basic assumptions (inputs from industry):
Flight control system designed
Models available
Criteria defined
Bertinoro – 20 Luglio 2012
Università di Siena
2
Main references
Springer LNCIS vol. 283
Springer LNCIS vol. 416
Bertinoro – 20 Luglio 2012
Università di Siena
3
EU Projects
• GARTEUR: Group for the Aeronautical Research and Technology in
Europe: Flight Mechanics Action Group 11 (1999-2002)
19 partners
benchmark: military aircraft
• COFCLUO: Clearance Of Flight Control Laws Using Optimization
(2007-2010)
6 partners
benchmark: civil aircraft (models provided by Airbus)
Bertinoro – 20 Luglio 2012
Università di Siena
4
Outline
• Current practice
• Models
• Criteria
• Worst case search
• Robustness analysis
• Two case studies
Aeroelastic stability
Comfort analysis wrt wind turbulence
Bertinoro – 20 Luglio 2012
Università di Siena
5
Clearance of flight control laws
Clearance of flight control laws (CFCL)
Before an aircraft can be tested in flight, it has to be proven to the authorities
that the flight control system is safe and reliable, and has the desired
performance under all possible operational conditions, and in the presence of
failures.
State of the art:
CFCL is a key issue in terms of time and costs
Baseline solution in industry mainly relies on brute force simulation in a
huge number of flight points
Bertinoro – 20 Luglio 2012
Università di Siena
6
Baseline solution
courtesy of Airbus
Bertinoro – 20 Luglio 2012
Università di Siena
7
Industrial objective
Bertinoro – 20 Luglio 2012
Università di Siena
8
CFCL using optimization
The use of optimization techniques in CFCL is still a research topic (difficult
to change standards in aerospace industry)
Objectives:
Worst case detection: detect worst cases faster and/or more reliably than
using Monte Carlo based techniques
Robustness analysis: give guarantees for whole regions of flight envelope
to be cleared
Bertinoro – 20 Luglio 2012
Università di Siena
9
Modeling
Main problem in optimization-based CFCL is the construction of an
appropriate model for the considered criterion
⇒ Trade-off between accuracy and complexity
Two main family of models:
Nonlinear Differential Equation (NDE) models of closed-loop aircraft
dynamics used for worst-case detection
Linear Fractional Representation (LFR) models, including rigid and
flexible modes, for clearing whole regions
Bertinoro – 20 Luglio 2012
Università di Siena
10
NDE model for rigid aircraft
Pilot and wind inputs
Actuators: position and rate saturations
Flight mechanics: quaternions, neural network models of aerodynamic coefficients
Sensors: main filters and delays
Flight control law: full system including protections
Bertinoro – 20 Luglio 2012
Università di Siena
11
NDE model for flexible aircraft
Pilot and wind inputs
Actuators and sensors
Integral model: coupling of structural model and aerodynamic loads
Kernel part of the control laws (without protections): roughly linear but scheduled
Bertinoro – 20 Luglio 2012
Università di Siena
12
Clearance criteria for rigid aircraft
Examples:
Unpiloted aircraft stability
Manoeuvrability requirements in the peripheral flight domain
Flight domain protections
Conditions:
For any initial flight conditions within the flight envelope
For any pilot inputs
For any wind perturbations within the certified set
Assuming uncertainties on aerodynamic coefficients
Bertinoro – 20 Luglio 2012
Università di Siena
13
Clearance criteria for flexible aircraft
Examples:
Aeroelastic stability:
Eigenvalues stability
Gain margin
Phase margins
Comfort in turbulence:
kTwind→acc (s)k2 ≤ c̄
Bertinoro – 20 Luglio 2012
Università di Siena
14
Worst case detection
c(p, F C): clearance criterion
p: uncertain parameters
F C: flight conditions
c0 : limiting acceptable value of criterion
min c(p, F C) − c0
p∈P
Proposed solutions (nonlinear programming):
Differentia evolution
Genetic algorithms
Evolution strategies
Particle swarm optimization
...
Bertinoro – 20 Luglio 2012
Università di Siena
15
Example: worst case pilot input
Search over all possible pilot inputs (parameterized)
Search over the whole flight domain (balance, weight, mass, height)
Optimization over 27 parameters
Use global search algorithms
Parallelization
Bertinoro – 20 Luglio 2012
Università di Siena
16
Example: worst case pilot input
Bertinoro – 20 Luglio 2012
Università di Siena
17
Comparison with baseline (Monte Carlo)
Optimization is usually better at finding worst cases (higher probability)
Monte Carlo also gives info about fault probability
Bertinoro – 20 Luglio 2012
Università di Siena
18
LFR models for robustness analysis
y
r
⇒
q
M (s)
p
∆(θ)
M (s): closed loop aeroelastic model
∆(θ): parametric uncertainty block
Steps:
1. Generation of consistent linear models on a parameter grid
2. Polynomial interpolation and LFR modeling
3. LFR model reduction
Bertinoro – 20 Luglio 2012
Università di Siena
19
Two case studies
Techniques for clearing entire regions of the flight envelope:
1) robust aeroelastic stability (Lyapunov-based analysis)
2) comfort criterion (robust H2 analysis)
Bertinoro – 20 Luglio 2012
Università di Siena
20
Robust aeroelastic stability
The largest real part of the closed-loop eigenvalues has to be negative, for all
possible values taken by the uncertain parameters (aircraft mass configuration)
and the trimmed flight variables (Mach number and calibrated air speed)
Techniques adopted:
Lyapunov-based analysis
µ analysis
IQCs
Bertinoro – 20 Luglio 2012
Università di Siena
21
Robust stability of LFR uncertainty models
Consider the LFR system
Σ:
−1 ẋ(t) = A(θ)x(t) = A + B∆(θ)(I − D∆(θ)) C x(t)
where ∆(θ) = diag(θ1 Is1 , . . . , θnθ Isnθ )
An equivalent representation of Σ is given by:
ẋ = Ax + Bq
Σ:
p = Cx + Dq ,
q = ∆(θ)p
where x ∈ Rn , q, p ∈ Rd and d =
Assumptions:
Pn θ
i=1
si .
θ ∈ Θ = [θ1 , θ1 ] × · · · × [θnθ , θnθ ] with 2nθ vertices Ver[Θ]
θ̇(t) = 0 (time-invariant uncertainty)
Bertinoro – 20 Luglio 2012
Università di Siena
22
System Σ is said to be:
Quadratically stable, if there exists a common quadratic
Lyapunov Function (LF) V (x) = xT P x, for all matrices A(θ), θ ∈ Θ
Robustly stable, if A(θ) is Hurwitz, for all θ ∈ Θ.
Known facts:
quadratic stability implies robust stability, while the converse is not true
quadratic stability is a sufficient condition for global exponential stability
of the equilibrium x = 0 also for time-varying parameters θi (t)
parameter-dependent and/or polynomial LFs provide less conservative
sufficient conditions for robust stability
Bertinoro – 20 Luglio 2012
Università di Siena
23
Convex relaxations
A number of Lyapunov based sufficient conditions for robust stability of LFR
systems have been formulated as SemiDefinite Programs (SDPs), which are a
special class of convex optimization problems
Classic example: Linear Matrix Inequalities (LMIs)
Given symmetric matrices Fi = FiT , i = 0, , . . . , m, check if there exists
x ∈ Rm such that
m
X
xi Fi > 0
F0 +
i=1
Bertinoro – 20 Luglio 2012
Università di Siena
24
Methods based on quadratic parameter-dependent LFs
Three examples:
Dettori & Scherer (2000)
Fu & Dasgupta (2001)
Wang & Balakrishnan (2002)
Possible alternative: methods based on polynomial LFs
suitable for problems of moderate size
usually much less conservative
Bertinoro – 20 Luglio 2012
Università di Siena
25
[Dettori & Scherer ’00]
If there exist:
a symmetric Lyapunov matrix P (θ) ∈ Rn×n , multiaffine in θ
two matrices S0 , S1 ∈ Rd×d
such that ∀θ ∈ Ver[Θ]
P (θ) > 0
T
0
I
A B
0 I
C D
where
W (θ) =
0
P (θ)
P (θ)
0
S1 +
0
0
S1T
−S0T − ∆(θ)S1T
then the system Σ is robustly stable.
I
0
A
0
0
W (θ)
C
0
B
< 0,
I
D
−S0 − S1 ∆(θ)
S0T ∆(θ) + ∆(θ)S0
,
Bertinoro – 20 Luglio 2012
Università di Siena
26
Remarks:
• multiaffine LF
V (x; θ) = xT
P0 +
nθ
X
θ j Pj +
j=1
nθ
nθ
X
X
θi θj Pij + · · ·
i=1 j=i+1
!
x
• parameter-dependent multiplier W (θ), parameterized by S0 , S1
• 2nθ LMIs of dimension (n + d), 2nθ LMIs of dimension n
• 2d2 + 2nθ
n(n + 1)
free variables
2
Bertinoro – 20 Luglio 2012
Università di Siena
27
[Fu & Dasgupta ’01]
Let Ti = blockdiag(0s1 , . . . , 0si−1 , Isi , 0si+1 , . . . , 0snθ ), Ci = Ti C, Di = Ti D
for i = 1, . . . , nθ , and D0 = −I.
If there exist 2nθ + 2 matrices Cµ,i ∈ Rd×n , Dµ,i ∈ Rd×d , i = 0, . . . , nθ , s.t.
#
#
"
"
h
i
h
i
T
T
Cµ,i
Ci
≤ 0, i = 1, . . . , nθ
+
Ci Di
Cµ,i Dµ,i
T
T
Dµ,i
Di
and a symmetric P (θ) ∈ Rn×n , multiaffine in θ, such that ∀θ ∈ Ver[Θ]
(θ) > 0
P
AT (θ)P (θ) + P (θ)A(θ)
where Π(θ) =
ΠT (θ)
P (θ)BD−1 (θ)
Π(θ)
− Dµ
−
CµT (θ)
C(θ) = ∆(θ)C,
Cµ (θ) = Cµ,0
+
(θ)D−1 (θ)
+
T (θ)
D−T (θ)Dµ
T (θ)
C T (θ)D−T (θ)Dµ
< 0,
D(θ) = ∆(θ)D − I,
Pnθ
Pnθ
+ i=1
θi Cµ,i , Dµ (θ) = Dµ,0 + i=1
θi Dµ,i
then the system Σ is robustly stable.
Bertinoro – 20 Luglio 2012
Università di Siena
28
Remarks:
• multiaffine LF
• parameter-dependent multipliers Cµ (θ) and Dµ (θ), parameterized by
Cµ,i , Dµ,i , i = 0, . . . , nθ
• nθ + 2nθ LMIs of dimension (n + d), 2nθ LMIs of dimension n
• (nθ + 1)(nd + d2 ) + 2nθ
n(n + 1)
free variables
2
Bertinoro – 20 Luglio 2012
Università di Siena
29
[Wang & Balakrishnan ’02]
If there exist:
nθ + 1 symmetric matrices Q0 , . . . , Qnθ ∈ Rn×n
a symmetric scaling matrix N ∈ Rd×d
such that, ∀θ ∈ Ver[Θ],
N >0
Q(θ) = Q0 + Pnθ θj Qj > 0
j=1
AQ(θ) + Q(θ)AT + B∆(θ)N ∆(θ)B T
T
T T
Q(θ)C + B∆(θ)N ∆(θ)D
then the system Σ is robustly stable.
Q(θ)C T + B∆(θ)N ∆(θ)DT
<0
T
−N + D∆(θ)N ∆(θ)D
Bertinoro – 20 Luglio 2012
Università di Siena
30
Remarks:
• candidate LF
nθ
T
V (x) = x
Q0 +
X
j=1
θj Qj
!−1
x
• 2nθ LMIs of dimension (n + d), 2nθ LMIs of dimension n,
1 LMI of dimension d
d(d + 1)
n(n + 1)
+ (nθ + 1)
free variables
2
2
• easily extended to slowly time-varying parameters
•
• generalized to polynomial Lyapunov functions [Chesi et al., ’04]
Bertinoro – 20 Luglio 2012
Università di Siena
31
Dealing with complexity
The considered methods are generally computationally unfeasible for the
clearance problems at hand
⇒ Find appropriate relaxations
(trade off conservatism and computational burden)
⇒ Divide into simpler problems
(partition the uncertainty domain)
Strong industrial requirement: easy-to-use tools
Bertinoro – 20 Luglio 2012
Università di Siena
32
Relaxations
• Lyapunov function: multiaffine (mapdlf), affine (apdlf), constant (clf)
• Multipliers: affine, constant, diagonal
• Scalings: constant, diagonal
Relaxation
Characteristics
FD-cµ
FD method with constant multipliers Cµ,0 , Dµ,0
FD-cdµ
FD method with constant diagonal multipliers Cµ,0 , Dµ,0
DS-dS
DS method with diagonal multipliers S0 , S1
WB-dN
WB method with diagonal scaling matrix N
Bertinoro – 20 Luglio 2012
Università di Siena
33
Progressive tiling
LTI uncertainty: partition the uncertainty domain into rectangular tiles, then
test robustness in each tile
Algorithm:
1) start with an hyperbox containing the entire uncertainty domain Θ
if cleared then: done! if not
2) reduce the size of the uncleared tiles (by bisecting each side)
3) repeat until every tile is cleared or minimum tile size is reached
Remark: for each tile the LFR is re-parameterized.
Bertinoro – 20 Luglio 2012
Università di Siena
34
Adaptive tiling
Idea: combine progressive tiling approach with an adaptive choice of the
relaxation (different Lyapunov function or multiplier)
Rationale: use conservative but fast methods first, then switch to more
powerful and computationally demanding ones only for the uncleared tiles
Tested on clearance problems: adaptation on the Lyapunov function
constant → affine → multiaffine
Bertinoro – 20 Luglio 2012
Università di Siena
35
Gridding
Before attempting to clear a tile, the tile is gridded and stability of models on
the grid is checked
If at least one model on the grid is unstable, the tile is skipped and temporarily
marked as unstable
(portions of the tile can be later cleared, as partitioning proceeds)
Three types of tiles when max number of partitions is reached:
Cleared
Unstable (contain unstable models found by gridding)
Unknown (not cleared and no unstable models)
Bertinoro – 20 Luglio 2012
Università di Siena
36
Software and GUI
All techniques implemented in MATLAB using:
LFR toolbox
YALMIP
SDPT3
A Graphical User Interface (GUI) developed to set up clearance problems and
display results
Bertinoro – 20 Luglio 2012
Università di Siena
37
Bertinoro – 20 Luglio 2012
Università di Siena
38
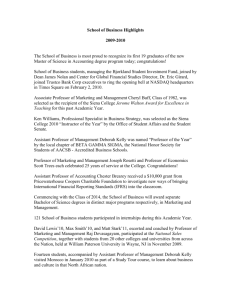
Example of GUI output
(Ma,Vc)
1
0.8
0.6
0.4
Vc
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
−1
−0.8
−0.6
−0.4
−0.2
0
Ma
0.2
0.4
0.6
0.8
1
Green tiles: cleared
Red tiles: unstable (contain unstable models found by gridding)
White tiles: unknown (not cleared and no unstable models)
Bertinoro – 20 Luglio 2012
Università di Siena
39
Main GUI features
Inputs:
model selection
choice of methods, relaxations and tiling options
restriction to polytopic flight envelopes
shifted stability (for slowly divergent modes)
Outputs:
2D plots of cleared, unstable and unknown regions
number of optimization problems solved and elapsed time
rates of cleared, unstable and unknown domain
clearance rate: ratio between cleared region and “clearable” domain (tiles
that do not contain unstable models found by gridding).
Bertinoro – 20 Luglio 2012
Università di Siena
40
New version available
A new version of the GUI is available at:
www.dii.unisi.it/∼garulli/lfr rai/
... try it! (any feedback is welcome)
Bertinoro – 20 Luglio 2012
Università di Siena
41
Closed-loop integral longitudinal models
Uncertain parameters and trim flight variables
Symbol
Description
C
central tank
O
outer tank
P
payload
X
center of gravity
M
Mach number
V
calibrated air speed
Nominal value
0.5
0
0.5
0
0.86
310 kt
Bertinoro – 20 Luglio 2012
Università di Siena
42
LFR models for aeroelastic stability
Models representative of closed-loop aeroelastic longitudinal dynamics in
frequency range [0,15] rad/sec.
Model
n
d
θ1 , s1
θ2 , s2
θ3 , s3
θ4 , s4
C
20
16
C, 16
−
−
−
CX
20
18
C, 14
−
−
X, 4
OC
20
50
C, 26
O, 24
−
−
OCX
20
50
C, 24
O, 22
−
X, 4
POC
20
79
C, 42
O, 24
P , 13
−
MV
20
54
M , 26
V , 28
−
−
Parameters not appearing in ∆ block are set to the nominal values
Bertinoro – 20 Luglio 2012
Università di Siena
43
Example 1: OC and OCX models
OCX model: progressive tiling
OC model: progressive tiling
Method (lf)
Cleared NOPs
Method (lf)
t (h:m:s)
Cleared
NOPs
DS (clf)
1
185
t (h:m:s)
327 : 00 : 28
DS-dS (clf)
1
73
0 : 26 : 32
DS (apdlf)
1
1
3 : 07 : 22
DS-dS (apdlf)
1
41
0 : 31 : 51
DS-dS (clf)
1
745
11 : 10 : 09
FD-cµ (clf)
1
33
2 : 55 : 30
DS-dS (apdlf)
1
265
10 : 53 : 36
FD-cµ (apdlf)
1
1
0 : 06 : 11
FD-cµ (clf)
1
185
41 : 31 : 34
FD-cdµ (clf)
1
85
0 : 22 : 00
FD-cµ (apdlf)
1
1
0 : 17 : 47
FD-cdµ (apdlf)
1
49
0 : 31 : 50
FD-cdµ (clf)
1
841
8 : 52 : 25
WB-dN
1
169
0 : 14 : 48
FD-cdµ (apdlf)
1
385
13 : 34 : 34
WB-dN
1
2129
4 : 34 : 12
Cleared: rate of uncertainty domain cleared
NOPs: number of LMI tests performed
Bertinoro – 20 Luglio 2012
Università di Siena
44
Example 2: MV model
MV model: progressive tiling
Time
Time/OP
(h:m:s)
(h:m:s)
1030
24 : 35 : 25
0 : 01 : 25
0.9875
1282
12 : 32 : 13
0 : 00 : 35
1
174
30 : 09 : 45
0 : 10 : 24
FD-cµ (clf)
0.9993
218
34 : 00 : 29
0 : 09 : 21
FD-cdµ (apdlf)
0.9921
1202
20 : 59 : 54
0 : 01 : 02
FD-cdµ (clf)
0.9895
1346
8 : 28 : 02
0 : 00 : 22
Method
Rate
NOPs
DS-dS (apdlf)
0.9931
DS-dS (clf)
FD-cµ (apdlf)
Rate: clearance rate (cleared / clearable)
Bertinoro – 20 Luglio 2012
Università di Siena
45
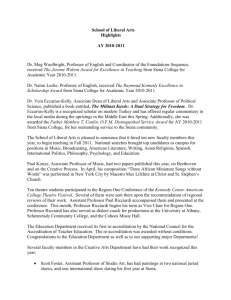
(Ma,Vc)
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
Vc
Vc
(Ma,Vc)
1
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
−0.5
0
Ma
DS-ds with clf
0.5
1
−1
−1
−0.5
0
Ma
0.5
1
DS-ds with apdlf
Bertinoro – 20 Luglio 2012
Università di Siena
46
(Ma,Vc)
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
Vc
Vc
(Ma,Vc)
1
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
−0.5
0
Ma
FD-cµ with clf
0.5
1
−1
−1
−0.5
0
Ma
0.5
1
FD-cµ with apdlf
Bertinoro – 20 Luglio 2012
Università di Siena
47
(Ma,Vc)
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
Vc
Vc
(Ma,Vc)
1
0
0
−0.2
−0.2
−0.4
−0.4
−0.6
−0.6
−0.8
−0.8
−1
−1
−0.5
0
Ma
FD-cdµ with clf
0.5
1
−1
−1
−0.5
0
Ma
0.5
1
FD-cdµ with apdlf
Bertinoro – 20 Luglio 2012
Università di Siena
48
Comments
apdlf conditions need to solve fewer optimization problems than clf
ones but this reduces the computational time only if number of problems
is significantly smaller (compare FD-cµ and FD-cdµ for OC and OCX)
choosing structurally simpler multipliers can increase the time if the
number of optimization problems grows too much (see FD with apdlf for
OC and OCX)
choosing the most powerful method is not always wise (or possible)
difficult to pick “best” method a priori
Bertinoro – 20 Luglio 2012
Università di Siena
49
Comfort analysis
Joint work with Anders Hansson and Ragnar Wallin (Linköping University)
Comfort index formulated as H2 performance from wind velocity to
acceleration at specific points along the aircraft fuselage
Need robust H2 analysis to account for uncertainty in the flight
parameters
Limited frequency range:
– industrial practice computes comfort index on a limited freq interval
– LFR models are valid only in specific freq range
Bertinoro – 20 Luglio 2012
Università di Siena
50
Comfort index
Jc =
s
1
π
Z
ω
|W (jω)|2 |T (jω; δ)|2 Φv (ω) dω
ω
Φv (ω): power spectral density of wind velocity
T (jω; δ): aircraft transfer function (with uncertain parameters δ)
W (jω): comfort filter
≫ Current industrial practice: gridding of the parameter space + numerical
integration in desired frequency range (lower bound to worst-case comfort
performance)
≫ Contribution: robust finite-frequency H2 analysis (upper bound to
worst-case comfort performance)
Bertinoro – 20 Luglio 2012
Università di Siena
51
Robust H2 analysis
Vaste literature (Paganini, Feron, Stoorvogel, Iwasaki, Sznaier,...)
Both time-domain and frequency-domain techniques
Frequency-domain techniques provide an upper bound to the system frequency
gains, for all frequencies ω and admissible uncertainties δ
→ Need tools to compute finite-frequency H2 norm
Bertinoro – 20 Luglio 2012
Università di Siena
52
Finite-frequency H2 norm
Given the system
ẋ(t) = Ax(t) + Bw(t)
z(t) = Cx(t)
with transfer function G(s), the finite-frequency H2 norm is defined as
Z ω̄
o
n
1
2
∗
T
kG(jω)k2,ω̄ =
Tr {G(jν) G(jν)} dν = Tr B Wo (ω)B
2π −ω̄
where
1
Wo (ω̄) =
2π
Z
ω̄
(jνI − A)−∗ C T C(jνI − A)−1 dν.
−ω̄
is the finite-frequency observability Gramian
Bertinoro – 20 Luglio 2012
Università di Siena
53
Finite-frequency observability Gramian
The finite-frequency observability Gramian can be computed as
Wo (ω̄) = L(ω̄)∗ Wo + Wo L(ω̄),
where Wo is the standard observability Gramian and
L(ω̄) =
j ln (A + j ω̄I)(A − j ω̄I)−1 .
2π
Main idea: use the above result together with standard robust H2 theory to
provide an upper bound to the robust finite frequency H2 norm of a system
with parametric uncertainty
Bertinoro – 20 Luglio 2012
Università di Siena
54
Problem formulation
LFR system:
ẋ(t) = Ax(t) + Bq q(t) + Bw w(t)
p(t) = Cp x(t) + Dpq q(t)
z(t) = Cz x(t) + Dzq q(t)
q(t) = ∆(δ)p(t)
∆(δ) = diag(δ1 Is1 , . . . , δnδ Isnδ ) ∈ ∆ := {∆(δ) : −1 ≤ δi ≤ 1}
Bq Bw
A
M11 M12
M=
= Cp Dpq
0
M21 M22
0
Cz Dzq
S(M ; ∆) = M22 + M21 ∆(I − M11 ∆)−1 M12
The robust finite-frequency H2 norm of the system is defined as
Z ω̄
1
sup kS(M ; ∆)k22,ω̄ =
Tr {S(M ; ∆)∗ S(M ; ∆)} dν
sup
2π ∆∈∆ −ω̄
∆∈∆
Bertinoro – 20 Luglio 2012
Università di Siena
55
Robust H2 theory
The system S(M, ∆) has robust H2 norm less than γ 2 if there exist Hermitian
matrices Wo , P+ , P− > 0, X > 0 (X commuting with ∆) , satisfying
T
T
T
T
AP− + P− A + Bq XBq
P− C + Bq XD
"
#
<0
X
0
CP− + DXBqT
DXDT −
0 I
AP+ + P+ AT + Bq XBqT
P+ C T + Bq XDT
"
#
<0
(SDP )
X
0
T
T
CP+ + DXBq
DXD −
0 I
Wo
I
>0
I
P+ − P−
T
Tr Bw Wo Bw < γ 2
[Paganini, ACC’97]
Bertinoro – 20 Luglio 2012
Università di Siena
56
Main result
Let Wo , P+ , P− , X, be the solution of (SDP ).
Then, an upper bound to the robust finite-frequency H2 norm is given by
o
n
∗
T
2
sup kS(M ; ∆)k2,ω̄ ≤ Tr Bw (Wo L(ω̄) + L(ω̄) Wo )Bw
∆∈∆
where
with
j −1 L(ω̄) =
ln (A + j ω̄I)(A − j ω̄I)
2π
A = A + (P− C T + Bq XDT )R−1 C
and
R=
X
0
0
I
− DXDT
Bertinoro – 20 Luglio 2012
Università di Siena
57
Skecth of the proof
• From standard robust H2 , (SDP ) guarantees that there exists Y (jω)
such that
S(M, ∆)(jω)∗ S(M, ∆)(jω) ≤ Y (jω), ∀ω, ∀∆ ∈ ∆
• Y (jω) admits a spectral factorization Y = (N −1 M2 )∗ (N −1 M2 ), whose
state space realization is given by
A + (P− C T + Bq XDT )R−1 C Bw
−1
N M2 =
1
R− 2 C
0
and Wo is its (standard) observability Gramian
• The finite-frequency observability Gramian of the spectral factor N −1 M2
is given by Wo L(ω̄) + L(ω̄)∗ Wo
Bertinoro – 20 Luglio 2012
Università di Siena
58
Extension to dynamic scaling
Choosing constant scaling matrices X in (SDP ) leads in general to
conservative upper bounds
Standard robust H2 theory exploits dynamic scaling matrices of the form
∗
X(s) = Cψ (sI − Aψ )−1 I X Cψ (sI − Aψ )−1 I
An upper bound to the robust finite-frequency H2 norm is obtained by solving
a slightly more involved SDP
Bertinoro – 20 Luglio 2012
Università di Siena
59
Numerical example
A=
−2.5 0.5
0
0
−1 0.5
−0.5 0
0
0
0
0
0
Cp
Cz
0
−50
0
0
−5
0
0
0 Bq =
100
0 −100
1 0 0
= 0 0 0
1 0 0
0
0 0
0 0
0 0
0.25 −0.5
0
0
0
0
0
0
0
0
Dpq
Dzq
0
5
Bw = 0
0
5
0 0
= 1 0
0 0
∆(δ) = δI2 , − 1 ≤ δ ≤ 1
Exact robust H2 norm: γ 2 = 1.5311, attained for δ = 0.25
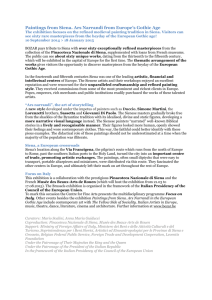
Exercise: compute the robust finite-frequency H2 norm for ω = 50 rad/s
(true value: 0.8919)
Bertinoro – 20 Luglio 2012
Università di Siena
60
← ω̄ = 50
|G(jω)|2
0.8
0.6
kS(M, ∆)k22,ω̄
1
1.5
1
0.5
0.4
0
1
0.2
4
10
0.5
2
0
0
10
0
−0.5
−2
10
0
2
10
10
ω [rad/s]
Gain plots for different values of δ
δ
10
−1
−2
10
ω̄ [rad/s]
Finite-frequency H2 norm for
different values of ω̄ and δ
Bertinoro – 20 Luglio 2012
Università di Siena
61
sup∆∈∆ kS(M, ∆)k22,ω̄
nψ = 0
nψ = 1
nψ = 2
2
kG(jω)k22,ω̄
1.5
1
← ω̄ = 50
0.5
0
−2
10
0
2
10
10
ω̄ [rad/s]
Robust finite-frequency H2 norm
Bertinoro – 20 Luglio 2012
Università di Siena
62
Comparison with low-pass filtering
An approximation of the robust finite-frequency H2 norm can be obtained by
p̄m
cascading the system with a low-pass filter F (s) = (s+
and then
p̄)m
computing the standard robust H2 norm of the resulting system
m
0
1
2
3
4
5
nψ = 0
2.0216
1.9660
1.9652
1.9649
1.9648
1.9648
nψ = 1
1.8836
1.8254
1.8117
1.8049
1.8093
1.8073
nψ = 2
1.8482
1.8002
1.7997
1.7994
1.7993
1.7994
nψ = 3
1.8421
1.7939
1.7929
1.7930
1.7930
1.7918
Robust H2 norm for the system with low-pass filter
nψ
0
1
2
3
kGk22,50
1.2631
1.2233
1.1953
1.1931
Robust finite-frequency H2 norm
Bertinoro – 20 Luglio 2012
Università di Siena
63
CFCL application
Model of a civil aircraft including both rigid and flexible body dynamics
δ: fuel tanks level, normalized in the range [−1, 1]
Resulting uncertain system (including approximated Von Karman filter
modeling the wind spectrum and output filters for the specified position):
LFR with 21 states and ∆ block of size 14
Model derived in the frequency range between 0 and 15 rad/s (no physical
meaning outside this range)
Proposed solution: robust finite-frequency H2 norm with ω̄ = 15 rad/s,
computed in Np partitions of the uncertainty interval [−1, 1] (constant scaling)
Bertinoro – 20 Luglio 2012
Università di Siena
64
3.5
|G(jω)|2
3
ω̄ = 15 →
2.5
2
1.5
1
0.5
0
−2
10
−1
10
0
10
1
10
2
10
3
10
ω [rad/s]
Gain plots for different values of δ
Bertinoro – 20 Luglio 2012
Università di Siena
65
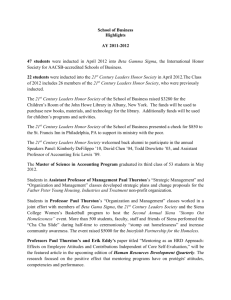
7
gridding + integration
ω̄ = 15 Np = 200
ω̄ = 15 Np = 100
ω̄ = 15 Np = 50
ω̄ = 15 Np = 20
kS(M, ∆)k22,ω̄
6
5
4
3
2
1
0
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
δ
Robust finite-frequency H2 analysis (pos. #12)
Bertinoro – 20 Luglio 2012
Università di Siena
66
robust, ω̄ = +∞
gridding, ω̄ = +∞
robust, ω̄ = 15
gridding, ω̄ = 15
7
kS(M, ∆)k22,ω̄
6
5
4
3
2
1
0
−1
−0.5
0
0.5
1
δ
Robust finite-frequency H2 analysis (Np = 20, pos. #4)
Bertinoro – 20 Luglio 2012
Università di Siena
67
Final remarks: Worst-case analysis
Mature technique
Easy to be integrated in industrial process
Tools implemented for A350 clearance
Need care in the choice and tuning of optimization technique
Bertinoro – 20 Luglio 2012
Università di Siena
68
Final remarks: Robustness analysis
Closely related to control design
Has proven to reduce conservatism with reasonable computational time
(competitive with gridding approach)
Efficient tools available for several techniques
Difficult generation of LFR models (not fully automated yet)
Need to propose an integrated framework for control design and
validation to make modeling cost flexible
Should be extended to nonlinear stability analysis
Research area at the crossroad between theory and application, with many
open problems
Bertinoro – 20 Luglio 2012
Università di Siena
69
Thanks!
Bertinoro – 20 Luglio 2012