Chapter 11: Boeing B-777: Fly-By

11
Boeing B-777: Fly-By-
Wire Flight Controls
Gregg F. Bartley
Boeing
11.1 Introduction
11.2 System Overview
11.3 Design Philosophy
11.4 System Architecture
Flight Deck Controls • System Electronics • ARINC 629
Data Bus • Interface to Other Airplane
Systems • Electrical Power
11.5 Control Surface Actuation
Fly-by-Wire Actuation • Mechanical Control
11.6 Fault Tolerance
11.7 System Operating Modes
11.8 Control Laws and System Functionality
Pitch Control • Yaw Control • Roll Control • 757 Test
Bed • Actuator Force-Flight Elimination
11.9 Primary Flight Controls System Displays and Annunciations
11.10 System Maintenance
Central Maintenance Computer • Line Replaceable
Units • Component Adjustment
11.11 Summary
Defining Terms
11.1 Introduction
Fly-By-Wire (FBW) Primary Flight Controls have been been used in military applications such as fighter airplanes for a number of years. It has been a rather recent development to employ them in a commercial transport application. The 777 is the first commercial transport manufactured by Boeing which employees a FBW Primary Flight Control System. This chapter will examine a FBW Primary
Flight Control System using the specific system on the 777 as an example. It must be kept in mind while reading this chapter that this is only a single example of what is currently in service in the airline industry. There are several other airplanes in commercial service made by other manufacturers that employ a different architecture for their FBW flight control system than described here.
A FBW flight control system has several advantages over a mechanical system. These include:
• Overall reduction in airframe weight.
• Integration of several federated systems into a single system.
• Superior airplane handling characteristics.
• Ease of maintenance.
© 2001 by CRC Press LLC
• Ease of manufacture.
• Greater flexibility for including new functionality or changes after initial design and production.
11.2 System Overview
Conventional primary flight controls systems employ hydraulic actuators and control valves controlled by cables that are driven by the pilot controls. These cables run the length of the airframe from the cockpit area to the surfaces to be controlled. This type of system, while providing full airplane control over the entire flight regime, does have some distinct drawbacks. The cable-controlled system comes with a weight penalty due to the long cable runs, pulleys, brackets, and supports needed. The system requires periodic maintenance, such as lubrication and adjustments due to cable stretch over time. In addition, systems such as the yaw damper that provide enhanced control of the flight control surfaces require dedicated actuation, wiring, and electronic controllers. This adds to the overall system weight and increases the number of components in the system.
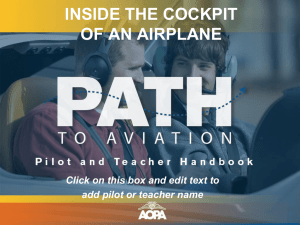
FIGURE 11.1
The Primary Flight Control System on the Boeing 777 is comprised of the outboard ailerons, flaperons, elevator, rudder, horizontal stabilizer, and the spoiler/speedbrakes.
In a FBW flight control system, the cable control of the primary flight control surfaces has been removed. Rather, the actuators are controlled electrically. At the heart of the FBW system are electronic computers. These computers convert electrical signals sent from position transducers attached to the pilot controls into commands that are transmitted to the actuators. Because of these changes to the system, the following design features have been made possible:
• Full-time surface control utilizing advanced control laws. The aerodynamic surfaces of the 777 have been sized to afford the required airplane response during critical flight conditions. The reaction time of the control laws is much faster than that of an alert pilot. Therefore, the size of the flight control surfaces could be made smaller than those required for a conventionally controlled airplane. This results in an overall reduction in the weight of the system.
• Retention of the desirable flight control characteristics of a conventionally controlled system and the removal of the undesirable characteristics. This aspect is discussed further in the section on control laws and system functionality.
• Integration of functions such as the yaw damper into the basic surface control. This allows the separate components normally used for these functions to be removed.
• Improved system reliability and maintainability.
© 2001 by CRC Press LLC
11.3 Design Philosophy
The philosophy employed during the design of the 777 Primary Flight Control System maintains a system operation that is consistent with a pilot’s past training and experience. What is meant by this is that however different the actual system architecture is from previous Boeing airplanes, the presentation to the pilot is that of a conventionally controlled mechanical system. The 777 retains the conventional control column, wheel, and rudder pedals, whose operation are identical to the controls employed on other Boeing transport aircraft. The flight deck controls of the 777 are very similar to those of the Boeing 747-400, which employs a traditional mechanically controlled Primary Flight Control
System.
Because the system is controlled electronically, there is an opportunity to include system control augmentation and envelope protection features that would have been difficult to provide in a conventional mechanical system. The 777 Primary Flight Control System has made full use of the capabilities of this architecture by including such features as:
• Bank angle protection
• Turn compensation
• Stall and overspeed protection
• Pitch control and stability augmentation
• Thrust asymmetry compensation
More will be said of these specific features later. What should be noted, however, is that none of these features limit the action of the pilot. The 777 design utilizes envelope protection in all of its functionality rather than envelope limiting . Envelope protection deters pilot inputs from exceeding certain predefined limits but does not prohibit it. Envelope limiting prevents the pilot from commanding the airplane beyond set limits. For example, the 777 bank angle protection feature will significantly increase the wheel force a pilot encounters when attempting to roll the airplane past a predefined bank angle. This acts as a prompt to the pilot that the airplane is approaching the bank angle limit. However, if deemed necessary, the pilot may override this protection by exerting a greater force on the wheel than is being exerted by the backdrive actuator. The intent is to inform the pilot that the command being given would put the airplane outside of its normal operating envelope, but the ability to do so is not precluded. This concept is central to the design philosophy of the 777 Primary Flight Control System.
11.4 System Architecture
11.4.1 Flight Deck Controls
As noted previously, the 777 flight deck utilizes standard flight deck controls; a control column, wheel, and rudder pedals that are mechanically linked between the Captain’s and First Officer’s controls. This precludes any conflicting input between the Captain and First Officer into the Primary Flight Control
System. Instead of the pilot controls driving quadrants and cables, as in a conventional system, they are attached to electrical transducers that convert mechanical displacement into electrical signals.
A gradient control actuator is attached to the two control column feel units. These units provide the tactile feel of the control column by proportionally increasing the amount of force the pilot experiences during a maneuver with an increase in airspeed. This is consistent with a pilot’s experience in conventional commercial jet transports.
Additionally, the flight deck controls are fitted with what are referred to as ‘‘backdrive actuators.” As the name implies, these actuators backdrive the flight deck controls during autopilot operation. This feature is also consistent with what a pilot is used to in conventionally controlled aircraft and allows the pilot to monitor the operation of the autopilot via immediate visual feedback of the pilot controls that is easily recognizable.
© 2001 by CRC Press LLC
11.4.2 System Electronics
There are two types of electronic computers used in the 777 Primary Flight Control System: the Actuator
Control Electronics (ACE), which is primarily an analog device, and the Primary Flight Computer (PFC), which utilizes digital technology. There are four ACEs and three PFCs employed in the system. The function of the ACE is to interface with the pilot control transducers and to control the Primary Flight
Control System actuation with analog servo loops. The role of the PFC is the calculation of control laws by converting the pilot control position into actuation commands, which are then transmitted to the
ACE. The PFC also contains ancillary functions, such as system monitoring, crew annunciation, and all the Primary Flight Control System onboard maintenance capabilities.
Four identical ACEs are used in the system, referred to as L1, L2, C, and R. These designations correspond roughly to the left, center, and right hydraulic systems on the airplane. The flight control functions are distributed among the four ACEs. The ACEs decode the signals received from the transducers used on the flight deck controls and the primary surface actuation. The ACEs convert the transducer position into a digital value and then transmit that value over the ARINC 629 data busses for use by the PFCs.
There are three PFCs in the system, referred to as L, C, and R. The PFCs use these pilot control and surface positions to calculate the required surface commands. At this time, the command of the automatic functions, such as the yaw damper rudder commands, are summed with the flight deck control commands, and are then transmitted back to the ACEs via the same ARINC 629 data busses. The ACEs then convert these commands into analog commands for each individual actuator.
11.4.3 ARINC 629 Data Bus
The ACEs and PFCs communicate with each other, as well as with all other systems on the airplane, via triplex, bi-directional ARINC 629 Flight Controls data busses, referred to as L, C, and R. The connection from these electronic units to each of the data busses is via a stub cable and an ARINC 629 coupler. Each coupler may be removed and replaced without disturbing the integrity of the data bus itself.
11.4.4 Interface to Other Airplane Systems
The Primary Flight Control System transmits and receives data from other airplane systems by two different pathways. The Air Data and Inertial Reference Unit (ADIRU), Standby Attitude and Air Data
Reference Unit (SAARU), and the Autopilot Flight Director Computers (AFDC) transmit and receive data on the ARINC 629 flight controls data busses, which is a direct interface to the Primary Flight
Computers. Other systems, such as the Flap Slat Electronics Unit (FSEU), Proximity Switch Electronics
Unit (PSEU), and Engine Data Interface Unit (EDIU) transmit and receive their data on the ARINC 629 systems data busses. The PFCs receive data from these systems through the Airplane Information Management System (AIMS) Data Conversion Gateway (DCG) function. The DCG supplies data from the systems data busses onto the flight controls data busses. This gateway between the two main sets of
ARINC 629 busses maintains separation between the critical flight controls busses and the essential systems busses but still allows data to be passed back and forth.
11.4.5 Electrical Power
There are three individual power systems dedicated to the Primary Flight Control System, which are collectively referred to as the Flight Controls Direct Current (FCDC) power system. An FCDC Power
Supply Assembly (PSA) powers each of the three power systems. Two dedicated Permanent Magnet
Generators (PMG) on each engine generate AC power for the FCDC power system. Each PSA converts the PMG alternating current into 28 V DC for use by the electronic modules in the Primary Flight Control
System. Alternative power sources for the PSAs include the airplane Ram Air Turbine (RAT), the 28-V
DC main airplane busses, the airplane hot battery buss, and dedicated 5 Ah FCDC batteries. During flight, the PSAs draw power from the PMGs. For on-ground engines-off operation or for in-flight failures of the PMGs, the PSAs draw power from any available source.
© 2001 by CRC Press LLC
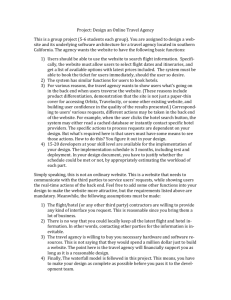
FIGURE 11.2
Block diagram of the electronic components of the 777 Primary Flight Control System, as well as the interfaces to other airplane systems.
11.5 Control Surface Actuation
11.5.1 Fly-by-Wire Actuation
The control surfaces on the wing and tail of the 777 are controlled by hydraulically powered, electrically signaled actuators. The elevators, ailerons, and flaperons are controlled by two actuators per surface, the rudder is controlled by three. Each spoiler panel is powered by a single actuator.
The horizontal stabilizer is positioned by two parallel hydraulic motors driving the stabilizer jackscrew.
The actuation powering the elevators, ailerons, flaperons, and rudder have several operational modes.
These modes, and the surfaces that each are applicable to, are defined below.
© 2001 by CRC Press LLC
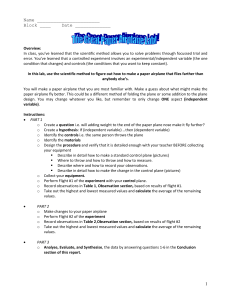
FIGURE 11.3
Block diagram of the 777 Fly-By-Wire Power Distribution System.
Active —Normally, all the actuators on the elevators, ailerons, flaperons, and rudder receive commands from their respective ACEs and position the surfaces accordingly. The actuators will remain in the active mode until commanded into another mode by the ACEs.
Bypassed —In this mode, the actuator does not respond to commands from its ACE. The actuator is allowed to move freely, so that the redundant actuator(s) on a given surface may position the surface without any loss of authority, i.e., the actuator in the active mode does not have to overpower the bypassed actuator. This mode is present on the aileron, flaperon, and rudder actuators.
Damped —In this mode, the actuator does not respond to the commands from the ACE. The actuator is allowed to move, but at a restricted rate which provides flutter damping for that surface. This mode allows the other actuator(s) on the surface to continue to operate the surface at a rate sufficient for airplane control. This mode is present on elevator and rudder actuators.
Blocked —In this mode, the actuator does not respond to commands from the ACE, and it is not allowed to move. When both actuators on a surface (which is controlled by two actuators) have failed, they both enter the ‘‘Blocked” mode. This provides a hydraulic lock on the surface. This mode is present on the elevator and aileron actuators.
An example using the elevator surface illustrates how these modes are used. If the inboard actuator on an elevator surface fails, the ACE controlling that actuator will place the actuator in the “Damped” mode. This allows the surface to move at a limited rate under the control of the remaining operative
© 2001 by CRC Press LLC
outboard actuator. Concurrent with this action, the ACE also arms the “Blocking” mode on the outboard actuator on the same surface. If a subsequent failure occurs that will cause the outboard actuator to be placed in the ‘‘Damped” mode by its ACE, both actuators will then be in the ‘‘Damped” mode and have their ‘‘Blocking” modes armed. An elevator actuator in this configuration enters the ‘‘Blocking” mode, which hydraulically locks the surface in place for flutter protection.
11.5.2 Mechanical Control
Spoiler panel 4 and 11 and the alternate stabilizer pitch trim system are controlled mechanically rather than electrically. Spoilers 4 and 11 are driven directly from control wheel deflections via a control cable.
The alternate horizontal stabilizer control is accomplished by using the pitch trim levers on the flight deck aisle stand. Electrical switches actuated by the alternate trim levers allow the PFCs to determine when alternate trim is being commanded so that appropriate commands can be given to the pitch control laws.
Spoiler panels 4 and 11 are also used as speedbrakes, both in the air and on the ground. The speedbrake function for this spoiler pair only has two positions: stowed and fully extended. The speedbrake commands for spoilers 4 and 11 are electrical in nature, with an ACE giving an extend or retract command to a solenoidoperated valve in each of the actuators. Once that spoiler pair has been deployed by a speedbrake command, there is no control wheel speedbrake command mixing, as there is on all the other fly-by-wire spoiler surfaces.
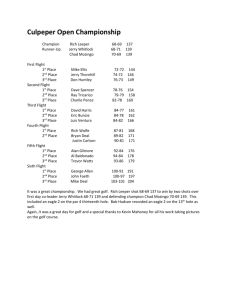
FIGURE 11.4
Schematic representation of the Boeing 777 Primary Flight Control System hydraulic power and electronic control functional distribution.
11.6 Fault Tolerance
‘‘Fault Tolerance” is a term that is used to define the ability of any system to withstand single or multiple failures which results in either no loss of functionality or a known loss of functionality or reduced level of redundancy while maintaining the required level of safety. It does not, however, define any particular method that is used for this purpose. There are two major classes of faults that any system design must
© 2001 by CRC Press LLC
deal with. These are
• A failure which results in some particular component becoming totally inoperative. An example of this would be a loss of power to some electronic component, such that it no longer performs its intended function.
• A failure which results in some particular component remaining active, but the functionality it provides is in error. An example of this failure would be a Low Range Radio Altimeter whose output is indicating the airplane is at an altitude 500 ft above the ground when the airplane is actually 200 ft above the ground.
One method that is used to address the first class of faults is the use of redundant elements. For example, there are three PFCs in the 777 Primary Flight Control System, each with three identical computing ‘‘lanes” within each PFC. This results in nine identical computing channels. Any of the three PFCs themselves can fail totally due to loss of power or some other failure which affects all three computing lanes, but the
Primary Flight Control System loses no functionality. All four ACEs will continue to receive all their surface position commands from the remaining PFCs. All that is affected is the level of available redundancy.
Likewise, any single computing lane within a PFC can fail, and that PFC itself will continue to operate with no loss of functionality. The only thing that is affected is the amount of redundancy of the system.
The 777 is certified to be dispatched on a revenue flight, per the Minimum Equipment List (MEL), with two computing lanes out of the nine total (as long as they are not within the same PFC channel) for 10 days and for a single day with one total PFC channel inoperative.
Likewise, there is fault tolerance in the ACE architecture. The flight control functions are distributed among the four ACEs such that a total failure of a single ACE will leave the major functionality of the system intact. A single actuator on several of the primary control surfaces may become inoperative due to this failure, and a certain number of spoiler symmetrical panel pairs will be lost. However, the pilot flying the airplane will notice little or no difference in handling characteristics with this failure. A total
ACE failure of this nature will have much the same impact to the Primary Flight Control System as that of a hydraulic system failure.
The second class of faults is one that results in erroneous operation of a specific component of the system.
The normal design practice to account for failures of this type is to have multiple elements doing the same task and their outputs voted or compared in some manner. This is sometimes referred to as a “voting plane.’’
All critical interfaces into the 777 FBW Primary Flight Control System use multiple inputs which are compared by a voting plane. For interfaces that are required to remain operable after a first failure, at least three inputs must be used. For example, there are three individual Low Range Radio Altimeter (LRRA) inputs used by the PFCs. The PFCs compare all three inputs and calculates a mid-value select on the three values; i.e., the middle value LRRA input is used in all calculations which require radio altitude. In this manner, any single failure of an LRRA that results in an erroneous value will be discarded. If a subsequent failure occurs which causes the remaining two LRRA signals to disagree by a preset amount, the PFCs will throw out both values and take appropriate action in those functions which use these data.
Additionally, a voting plane scheme is used by the PFCs on themselves. Normally, a single computing lane within a PFC channel is declared as the ‘‘master” lane, and that lane is responsible for transmitting all data onto the data busses for use by the ACEs and other airplane systems. However, all three lanes are simultaneously computing the same control laws. The outputs of all three computing lanes within a single PFC channel are compared against each other. Any failure of a lane that will cause an erroneous output from that lane will cause that lane to be condemned as ‘‘failed” by the other two lanes.
Likewise, the outputs from all three PFC channels themselves are compared. Each PFC looks at its own calculated command output for any particular actuator, and compares it with the same command that was calculated by the other two PFC channels. Each PFC channel then does a mid-value select on the three commands, and that value (whether it was the one calculated by itself or by one of the other
PFC channels) is then output to the ACEs for the individual actuator commands. In this manner, it is assured that each ACE receives identical commands from each of the PFC channels.
© 2001 by CRC Press LLC
By employing methods such as those described above, it is assured that the 777 Primary Flight Control
System is able to withstand single or multiple failures and be able to contain those failures in such a manner that the system remains safe and does not take inappropriate action due to those failures.
11.7 System Operating Modes
The 777 FBW Primary Flight Control System has three operating modes: Normal, Secondary, and Direct.
These modes are defined below:
Normal —In the ‘‘Normal” mode, the PFCs supply actuator position commands to the ACEs, which convert them into an analog servo command. Full functionality is provided, including all enhanced performance, envelope protection, and ride quality features.
Secondary —In the ‘‘Secondary” mode, the PFCs supply actuator position commands to the ACEs, just as in the ‘‘Normal” mode. However, functionality of the system is reduced. For example, the envelope protection functions are not active in the “Secondary” mode. The PFCs enter this mode automatically from the ‘‘Normal” mode when there are sufficient failures in the system or interfacing systems such that the ‘‘Normal” mode is no longer supported. An example of a set of failures that will automatically drop the system into the ‘‘Secondary” mode is total loss of airplane air data from the ADIRU and SAARU. The airplane is quite capable of being flown for a long period of time in the ‘‘Secondary” mode. It cannot, however, be dispatched in this condition.
Direct —In the ‘‘Direct” mode, the ACEs do not process commands from the PFCs. Instead, each ACE decodes pilot commands directly from the pilot controller transducers and uses them for the closed loop servo control of the actuators. This mode will automatically be entered due to total failure of all three PFCs, failures internal to the ACEs, loss of the flight controls ARINC 629 data busses, or some combination of these failures. It may also be selected manually via the PFC disconnect switch on the overhead panel in the flight deck. The airplane handling characteristics in the “Direct” mode closely match those of the ‘‘Secondary” mode.
11.8 Control Laws and System Functionality
The design philosophy employed in the development of the 777 Primary Flight Control System control laws stresses aircraft operation consistent with a pilot’s past training and experience. The combination of electronic control of the system and this philosophy provides for the feel of a conventional airplane, but with improved handling characteristics and reduced pilot workload.
11.8.1 Pitch Control
Pitch control is accomplished through what is known as a maneuver demand control law, which also referred to as a C * U control law. C * (pronounced ‘‘C-Star”) is a term that is used to describe the blending of the airplane pitch rate and the load factor (the amount of acceleration felt by an occupant of the airplane during a maneuver). At low airspeeds, the pitch rate is the controlling factor. That is, a specific push or pull of the column by the pilot will result in some given pitch rate of the airplane. The harder the pilot pushes or pulls on the column, the faster the airplane will pitch nose up or nose down. At high airspeeds, the load factor dominates. This means that, at high airspeeds, a specific push or pull of the column by the pilot will result in some given load factor.
The ‘‘U” term in C * U refers to the feature in the control law which will, for any change in the airspeed away from a referenced trim speed, cause a pitch change to return to that referenced airspeed. For an increase in airspeed, the control law will command the airplane nose up, which tends to slow the airplane down. For a decrease in airspeed, the control law causes a corresponding speed increase by commanding
© 2001 by CRC Press LLC
the airplane nose down. This introduces an element of speed stability into the airplane pitch control.
However, airplane configuration changes, such as a change in the trailing edge flap setting or lowering the landing gear, will NOT result in airplane pitch changes, which would require the pilot to re-trim the airplane to the new configuration. Thus, the major advantage of this type of control law is that the nuisance-handling characteristics found in a conventional, mechanically controlled flight control system which increase the pilot workload are minimized or eliminated, while the desirable characteristics are maintained.
While in flight, the pitch trim switches on the Captain’s and First Officer’s control wheels do not directly control the horizontal stabilizer as they normally do on conventionally controlled airplanes.
When the trim switches are used in flight, the pilot is actually requesting a new referenced trim speed.
The airplane will pitch nose up or nose down, using the elevator surfaces, in response to that reference airspeed change to achieve that new airspeed. The stabilizer will automatically trim, when necessary, to offload the elevator surface and allow it to return to its neutral surface when the airplane is in a trimmed condition. When the airplane is on the ground, the pitch trim switches do trim the horizontal stabilizer directly. While the alternate trim levers (described previously) move the stabilizer directly, even in flight, the act of doing so will also change the C * U referenced trim speed such that the net effect is the same as would have been achieved if the pitch trim switches on the control wheels had been used. As on a conventional airplane, trimming is required to reduce any column forces that are being held by the pilot.
The pitch control law incorporates several additional features. One is called landing flare compensation.
This function provides handling characteristics during the flare and landing maneuvers consistent with that of a conventional airplane, which would have otherwise been significantly altered by the C * U control law. The pitch control law also incorporates Stall and Overspeed Protection. These functions will not allow the referenced trim speed to be set below a predefined minimum value or above the maximum operating speed of the airplane. They also significantly increase the column force that the pilot must hold in order to fly above or below those speeds. An additional feature incorporated into the pitch control law is turn compensation, which enables the pilot to maintain a constant altitude with minimal column input during a banked turn.
The unique 777 implementation of maneuver demand and speed stability in the pitch control laws means that:
• An established flight path remains unchanged unless the pilot changes it through a control column input, or if the airspeed changes and the speed stability function takes effect.
• Trimming is required only for airspeed changes and not for airplane configuration changes.
11.8.2 Yaw Control
The yaw control law contains the usual functionality employed on other Boeing jetliners, such as the yaw damper and rudder ratio changer (which compensates a rudder command as a function of airspeed).
However, the 777 FBW rudder control system has no separate actuators, linkages, and wiring for these functions, as have been used in previous airplane models. Rather, the command for these functions are calculated in the PFCs and included as part of the normal rudder command to the main rudder actuators.
This reduces weight, complexity, maintenance, and spares required to be stocked.
The yaw control law also incorporates several addition features. The gust suppression system reduces airplane tag wag by sensing wind gusts via pressure transducers mounted on the vertical tail fin and applying a rudder command to oppose the movement that would have otherwise been generated by the gust. Another feature is the wheel-rudder crosstie function, which reduces sideslip by using small amounts of rudder during banked turns.
One important feature in the yaw control is Thrust Asymmetry Compensation, or TAC. This function automatically applies a rudder input for any thrust asymmetry between the two engines which exceed
© 2001 by CRC Press LLC
approximately 10% of the rated thrust. This is intended to cancel the yawing moment associated with an engine failure. TAC operates at all airspeeds above 80 kn even on the ground during the take-off roll.
It will not operate when the engine thrust reversers are deployed.
11.8.3 Roll Control
The roll control law utilized by the 777 Primary Flight Control System is fairly conventional. The outboard ailerons and spoiler panels 5 and 10 are locked out in the faired position when the airspeed exceeds a value that is dependent upon airspeed and altitude. It roughly corresponds to the airplane ‘‘flaps up” maneuvering speed. As with the yaw damper function described previously, this function does not have a separate actuator, but is part of the normal aileron and spoiler commands. The bank angle protection feature in the roll control law has been discussed previously.
11.8.4 757 Test Bed
The control laws and features discussed here were incorporated into a modified 757 and flown in the summer of 1992, prior to full-scale design and development of the 777 Primary Flight Control System.
The Captain’s controls remained connected to the normal mechanical system utilized on the 757. The
777 control laws were flown through the First Officer’s controls. This flying testbed was used to validate the flight characteristics of the 777 fly-by-wire system, as was flown by Boeing, customer, and regulatory agency pilots. When the 777 entered into its flight test program, its handling characteristics were extremely close to those that had been demonstrated with the 757 flying testbed.
11.8.5 Actuator Force-Fight Elimination
One unique aspect of the FBW flight control system used on the 777 is that the actuators on any given surface are all fully powered at all times. There are two full-time actuators driving each of the elevator, aileron, and flaperon surfaces, just as there are three full-time actuators on the rudder. The benefit of this particular implementation is that each individual actuator was able to be sized smaller than it would have had to have been if each surface was going to be powered by a single actuator through the entire flight regime. In addition, there is not a need for any redundancy management of an active/standby actuation system. However, this does cause a concern in another area. This is a possible actuator forcefight condition between the multiple actuators on a single flight control surface.
Actuator force-fight is caused by the fact that no two actuators, position transducers, or set of controlling servo loop electronics are identical. In addition, there always will be some rigging differences of the multiple actuators as they are installed on the airplane. These differences will result in one actuator attempting to position a flight control surface in a slightly different position than its neighboring actuator.
Unless addressed, this would result in a twisting moment upon the surface as the two actuators fight each other to place the surface in different positions. In order to remove this unnecessary stress on the flight control surfaces, the Primary Flight Computer control laws include a feature which ‘‘nulls out” these forces on the surfaces.
Each actuator on the 777 Primary Flight Control System includes what is referred to as a Delta Pressure, or Delta P, pressure transducer. These transducer readings are transmitted via the ACEs to the PFCs, which are used in the individual surface control laws to remove the force-fight condition on each surface.
The PFCs add an additional positive or negative component to each of the individual elevator actuator commands, which results in the difference between the two Delta P transducers being zero. In this way, the possibility of any force-fight condition between multiple actuators on a single surface is removed.
The surface itself, therefore, does not need to be designed to withstand these stresses, which would have added a significant amount of weight to the airplane.
© 2001 by CRC Press LLC
11.9 Primary Flight Controls System Displays and Annunciations
The primary displays for the Primary Flight Control System on the 777 are the Engine Indication and
Crew Alerting System (EICAS) display and the Multi-Function Display (MFD) in the flight deck. Any failures that require flight crew knowledge or action are displayed on these displays in the form of an
English language message. These messages have several different levels associated with them, depending upon the level of severity of the failure.
Warning (Red with accompanying aural alert) : A nonnormal operational or airplane system condition that requires immediate crew awareness and immediate pilot corrective compensatory action.
Caution (Amber with accompanying aural alert) : A nonnormal or airplane system condition that requires immediate crew awareness. Compensatory or corrective action may be required.
Advisory (Amber with no accompanying aural alert) : A nonnormal operational or airplane system condition which requires crew awareness. Compensatory or corrective action may be required.
Status (White) : No Dispatch or Minimum Equipment List (MEL) related items requiring crew awareness prior to dispatch.
Also available on the MFD, but not normally displayed in flight, is the flight control synoptic page, which shows the position of all the flight control surfaces.
11.10 System Maintenance
The 777 Primary Flight Control System has been designed to keep line maintenance to a minimum, but when tasks do need to be accomplished, they are straightforward and easy to understand.
11.10.1 Central Maintenance Computer
The main interface to the Primary Flight Control System for the line mechanic is the Central Maintenance
Computer (CMC) function of AIMS. The CMC uses the Maintenance Access Terminal (MAT) as its primary display and control. The role of the CMC in the maintenance of the Primary Flight Control
System is to identify failures present in the system and to assist in their repair. The two features utilized by the CMC that accomplish these tasks are maintenance messages and ground maintenance tests.
Maintenance messages describe to the mechanic, in simplified English, what failures are present in the system and the components possibly at fault. The ground maintenance tests exercise the system, test for active and latent failures, and confirm any repair action taken. They are also used to unlatch any EICAS and Maintenance Messages that may have become latched due to failures.
The PFCs are able to be loaded with new software through the Data Loader function on the MAT. This allows the PFCs to be updated to a new software configuration without having to take them out of service.
11.10.2 Line Replaceable Units
All the major components of the system are Line Replaceable Units (LRU). This includes all electronics modules, ARINC 629 data bus couplers, hydraulic and electrical actuators, and all position, force, and pressure transducers. The installation of each LRU has been designed such that a mechanic has ample space for component removal and replacement, as well as space for the manipulation of any required tools.
Each LRU, when replaced, must be tested to assure that the installation was accomplished correctly.
The major LRUs of the system (transducers, actuators, and electronics modules) have LRU Replacement
Tests that are able to be selected via a MAT pull-down menu and are run by the PFCs. These tests are
© 2001 by CRC Press LLC
user-friendly and take a minimum amount of time to accomplish. Any failures found in an LRU replacement test will result in a maintenance message, which details the failures that are present.
11.10.3 Component Adjustment
The primary surface actuators on the 777 are replaced in the same manner as on conventional airplanes. The difference is how they are adjusted. Each elevator, aileron, flaperon, and rudder actuator has what is referred to as a null adjust transducer, which is rotated by the mechanic until the actuator is positioned correctly. For example, when a rudder actuator is replaced, all hydraulic systems are depressurized except for the one that supplies power to the actuator that has just been replaced. The Null Adjust Transducer is then adjusted until the rudder surface aligns itself with a mark on the empennage, showing that the actuator has centered the rudder correctly.
The transducers used on the pilot controls are, for the most part, individual LRUs. However, there are some packages, such as the speedbrake lever position transducers and the column force transducers, which have multiple transducers in a single package. When a transducer is replaced, the Primary Flight
Controls EICAS Maintenance Pages are used to adjust the transducer to a certain value at the system rig point. There are CMC-initiated LRU replacement tests which check that the component has been installed correctly and that all electrical connections have been properly mated.
11.11 Summary
The Boeing 777 fly-by-wire Primary Flight Control System utilizes new technology to provide significant benefits over that of a conventional system. These benefits include a reduction in the overall weight of the airplane, superior handling characteristics, and improved maintainability of the system. At the same time, the control of the airplane is accomplished using traditional flight deck controls, thereby allowing the pilot to fly the airplane without any specialized training when transferring from a more conventional commercial jet aircraft. The technology utilized by the 777 Primary Flight Control System has earned its way onto the airplane, and is not just technology for technology’s sake.
Defining Terms
ACE: Actuator Control Electronics
ADIRU: Air Data Inertial Reference Unit
ADM: Air Data Module (Static and Total Pressure)
AFDC: Autopilot Flight Director Computer
AIMS: Airplane Information Management System
ARINC: Aeronautical Radio Inc. (Industry Standard)
C:
C * U:
Center
Pitch Control Law utilized in the Primary Flight Computer
CMC: Central Maintenance Computer Function in AIMS
DCGF: Data Conversion Gateway Function of AIMS
EDIU: Engine Data Interface Unit
EICAS: Engine Indication and Crew Alerting System
ELMS: Electrical Load Management System
FBW: Fly-By-Wire
FCDC: Flight Controls Direct Current (power system)
FSEU: Flap Slat Electronic Unit
L:
L1:
L2:
Left
Left 1
Left 2
© 2001 by CRC Press LLC
LRRA: Low Range Radio Altimeter
LRU: Line Replaceable Unit
MAT:
MEL:
Maintenance Access Terminal
Minimum Equipment List
MFD:
MOV:
PCU:
PFC:
Multi-Function Display
Motor-Operated Valve
Power Control Unit (hydraulic actuator)
Primary Flight Computer
PMG:
PSA:
R:
RAT:
Permanent Magnet Generator
Power Supply Assembly
Right
Ram Air Turbine
SAARU: Standby Attitude and Air Data Unit
TAC: Thrust Asymmetry Compensation
WEU: Warning Electronics Unit
© 2001 by CRC Press LLC