MONOTONE CURVES
BERND KIRCHHEIM, EVA KOPECKÁ, AND STEFAN MÜLLER
Abstract. We estimate the rate of convergence of products of
projections on K finite dimensional or finite co-dimensional subspaces in ℓ2 .
Introduction
Let K be a fixed natural number and let L be a family of K closed
affine subspaces of ℓ2 of finite dimension or codimension. Let z ∈ ℓ2
and k1 , k2, · · · ∈ {1, 2, . . . , K} be arbitrary. Consider the sequence of
projections
z1 = Pk1 z,
zn = Pkn zn−1 ,
where Pk denotes the orthogonal projection on the k-th subspace in L.
Notice that all zi ’s are contained in the space Z = span (X ∪ Y ), where
X is the union of the finite dimensional affine spaces in L, and Y is the
union of the finite dimensional orthogonal complements of the infinite
dimensional affine spaces in L.
The orbit {zi } is always bounded according to [ADW], [BGP], and
[Me]. In Theorem 3.1 we show a “local version” of this result:
diam 2 {zi }∞
i=1 ≤ c(K, n)
∞
X
|zi+1 − zi |2 ,
i=1
where the constant c(K, n) > 0 depends on the number K of the spaces
and their maximal dimension or co-dimension n (for each space we
choose the one which is finite) only. If the spaces intersect in the
origin, the result gives a quantitative version, a rate of convergence, in
a theorem of Prager [P]: for all j ≤ k,
(1)
|zj − zk |2 ≤ c(K, n)(|zj |2 − |zk |2 ),
Date: August 4, 2009.
2000 Mathematics Subject Classification. Primary: 46C05; Secondary: 47H09.
Key words and phrases. alternating projections, curve, extension, Hilbert space.
The second author was supported by Grant FWF-P19643-N18.
1
2
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
consequently, the sequence {zi } converges in norm. For closed infinite
dimensional subspaces of ℓ2 both the questions of the rate of convergence, or just plain convergence are open.
If L is a family of K closed linear subspaces of ℓ2 , then any sequence
{zi } of orthogonal projections on the spaces in L converges weakly
[AA]. If K = 2 the sequence of projections even converges in norm
[vN]. If K ≥ 3, this is known only under additional assumptions, for
example, if the sequence {ki } is (quasi) periodic [H, S].
The key to proving the rate of convergence (1) is our derivatives
involving separation Theorem 2.4. Given w in the unit sphere of
Rd , and given K affine subspaces L̃1 , L̃2 , . . . , L̃K of Rd , there exists
a smooth function Φ : Rd → R with a Lipschitz derivative, so that
Φ(w) − Φ(0) = 1, and Φ′ (u) is parallel to L̃i for each u ∈ L̃i . The
current proof gives dependence of the Lipschitz constant of Φ′ on both
the number of the subspaces K and on their maximal dimension n.
Dropping the dependence on n would result in the estimate (1) being
independent of n and thus also in the convergence holding true for any
finite family of closed subspaces of ℓ2 .
The paper is organized as follows. The next section comprises a few
elementary, but for our considerations vital facts about Hilbert spaces.
In the core Section 2 we prove the separation Theorem 2.4 which we
then use to show the rate of convergence of the projections in Section 3.
In the last Section 4 we give another curious application of Theorem 2.4. Let e1 and e2 be two orthogonal vectors in the unit sphere
of ℓ2 . In connection with projections we wondered about the following
question. Given ε > 0 arbitrarily small, does there exist a piecewise
linear curve γ connecting e1 with (1 − ε)e2 , so that the distance from
the origin decreases along γ and all segments of γ are parallel to at
most, say, 5 different vectors? In Theorem 4.1 we show that for small
ε > 0 there is no such a curve.
1. Hilbert space preliminaries
This section comprises a few elementary facts about finite dimensional Hilbert spaces for handy application elsewhere in the paper.
Let X and Y be subspaces of Rd . Then any pair of affine subspaces
X̃ and Ỹ parallel to X and Y can be up to a translation of the whole
pair be represented as X + z and Y , where the vector z is orthogonal
to both X and Y . As a corollary, iterating the orthogonal projections
between X̃ and Ỹ can easily be expressed in terms of iterating the
projections between X and Y , and then, by [P], or by [vN], the sequence
{(PX̃ PỸ )n (p)}∞
n=1 is always convergent. For closed infinite dimensional
MONOTONE CURVES
3
affine subspaces of ℓ2 this is in general no longer the case, as their
distance does not have to be attained (this can happen when the angle
between X and Y is zero, although X ∩ Y = 0). According to [KR],
in such a case the norms {|(PX̃ PỸ )n (p)|}∞
n=1 tend to infinity for any
p ∈ ℓ2 .
Lemma 1.1. Let X̃ = X + u and Ỹ = Y + v be two affine subspaces of
Rd , where X and Y are subspaces and u, v ∈ Rd . There exist w, z ∈ Rd ,
so that z is orthogonal to both X and Y , and X̃ = X + w + z and Ỹ =
Y +w. Moreover, if p ∈ Rd then (PX̃ PỸ )n (p) = (PX PY )n (p−w)+w +z
for n ∈ N.
Proof. Choose x ∈ X and y ∈ Y so that PX+Y (u − v) = x + y and set
z = u − v − (x + y) and w = v + y. Then z is orthogonal to both X
and Y and
X̃ = X + (u − v) + v = (X + x) + y + z + v = X + w + z
Ỹ = Y + y + v = Y + w.
By translating the whole picture by −w, iterating the projections, and
then translating back by w, it is enough to show the equation for the
iterates when w = 0, that is when X̃ = X + z and Ỹ = Y . Then
PX̃ PỸ (p) = PX̃ PY (p) = z + PX (PY (p) − z) = z + PX (PY (p)),
and the rest follows by a straightforward induction.
Any two finite dimensional spaces X, Y ⊂ ℓ2 with dim X ≤ dim Y
n
possess bases {ei }m
i=1 and {fi }i=1 so that X +Y can be written as a sum
of the pairwise orthogonal at most 2-dimensional subspaces defined by
the basis vectors:
span {e1 , f1 } ⊕ · · · ⊕ span {em , fm } ⊕ span {fm+1 } ⊕ · · · ⊕ span {fn }.
Lemma 1.2. Let X and Y be two subspaces of Rd with 1 ≤ dim X =
m ≤ n = dim Y . Then there exist orthonormal bases {ei }m
i=1 and
{fi }ni=1 of X and Y , and 0 ≤ k ≤ m so that
(i) ei = fi if and only if i ≤ k;
(ii) the at most 2-dimensional spaces span {ei }, i ≤ k, span {ei , fi },
k < i ≤ m, and span {fi }, m < i ≤ n are all pairwise orthogonal.
Proof. If the space X ∩ Y is non-trivial, we first choose an orthonormal
basis {ei }ki=1 = {fi }ki=1 of it, and from now on will assume that X ∩Y =
0 and k = 0.
We use the following claim, which we will prove later. Here SX
stands for the unit sphere of X. If x ∈ SX and y ∈ SY realize the
4
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
distance between the two spheres, that is, |x − y| = dist (SX , SY ),
then both vectors x and y are orthogonal to the space ker x ∩ X and,
symmetrically, also to ker y ∩ Y .
Let e1 ∈ SX and f1 ∈ SY be so that 0 < |e1 − f1 | = dist (SX , SY ).
Then e1 and f1 are orthogonal to X1 = ker e1 ∩ X and Y1 = ker f1 ∩ Y .
We choose e2 ∈ SX1 and f2 ∈ SY2 , so that 0 < |e2 −f2 | = dist (SX1 , SY1 ),
and so on, till we have constructed a basis of X. If at this moment still
Yj 6= 0, we choose also an orthonormal basis {fi }ni=j of Yj .
To prove the claim, observe that if x is not already orthogonal to Y ,
then y = PY x/|PY x| and
span {x, y} = span {y, x − PY x}.
The latter space is clearly orthogonal to ker y ∩ Y . Similarly we get
that span {x, y} is orthogonal to ker x ∩ X.
Bases as defined in the above lemma are particularly suitable for
describing the orthogonal projection from X onto Y and vice versa.
Lemma 1.3. Let X and Y be two subspaces of Rd with 1 ≤ dim X =
n
m ≤ n = dim Y and let {ei }m
i=1 and {fi }i=1 be their orthonormal bases
2
as in Lemma 1.2. Let ai = 1 − hei , fi i be the square of the sinus of
the angle between ei and fi for 1 ≤ i ≤ m. Let z ∈ Rd be orthogonal
to both of the spaces X and Y , let w ∈ Rd , and X̃ = X + w + z, and
Ỹ = Y + w be affine subspaces. Let u ∈ X̃. Then
|PỸ u − u|2 = |z|2 +
m
X
ai hei , u − wi2 = |z|2 +
i=1
m
X
ai |P̃i u − u|2 ,
i=1
where P̃i is the orthogonal projection onto X̃i = w + z + ker ei ∩ X.
Proof. We first show the statement for the spaces X and Y . Let x =
P
m
i=1 xi ei ∈ X. Then hx, fj i = xj hej , fj i for 1 ≤ j ≤ m and it is zero
for j > m. Hence
2
|PY x−x| = |
m
X
i=1
m
m
m
X
X
X
2
2
2
hei , fi ixi fi −
xi ei | =
xi |hei , fi ifi −ei | =
ai x2i .
i=1
i=1
i=1
Let Xi = ker ei ∩ X and let Pi be the projection onto Xi . Since z is
orthogonal to X ∪ Y , and PỸ u = w + PY (u − w − z) for u ∈ X̃, and,
similarly, P̃i u = w + z + Pi (u − w), according to what we have just
MONOTONE CURVES
5
proved
|PỸ u − u|2 = |PY (u − w − z) − (u − w − z) − z|2
= |z|2 + |PY (u − w − z) − (u − w − z)|2
m
X
2
= |z| +
ai hei , u − w − zi2
= |z|2 +
i=1
m
X
ai |Pi(u − w − z) − (u − w − z)|2
i=1
= |z|2 +
m
X
ai |Pi(u − w) + w + z − u|2
i=1
= |z|2 +
m
X
ai |P̃iu − u|2.
i=1
2. Extensions
This section is the core of the paper. We prove here our main tool for
estimating lengths of monotone curves, Theorem 2.4. It is a separation
theorem involving derivatives. Given w in the unit sphere of Rd , and
given K affine subspaces L̃1 , L̃2 , . . . , L̃K of Rd , there exists a smooth
function Φ : Rd → R so that Φ(w) − Φ(0) = 1, and the vector Φ′ (u) is
parallel to L̃i for each u ∈ L̃i . Moreover, Φ′ is Lipschitz with a constant
depending on K and d only. A natural candidate for Φ would, of course,
be the linear functional w : Rd → R, just it does not have in general the
property that its derivative, the constant mapping equal to the vector
w, is parallel to all the given spaces L̃i . To modify the function w for
our purpose, we use jets and their established extension properties.
Definition 2.1. Let F be a closed subset of Rd and J = (J0 , J1 ) :
F → R × Rd be a mapping. Let c ≥ 0 be the smallest number so that
|J| ≤ c and for all u, v ∈ F ,
(i) |J1 (u) − J1 (v)| ≤ c|u − v|, and
(ii) |J0 (v) − J0 (u) − hJ1 (u), v − ui| ≤ c|u − v|2 .
We call J a jet on F of norm c.
Notice, that if F = Rd , then J1 is the derivative of J0 . A jet defined
on a closed subset of Rd can be extended to a jet on the entire space
of a somewhat larger norm. How many times larger, does in general
depend on the dimension d. The following Whitney type extension
theorem can be found in [S] on page 177.
6
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
Theorem 2.2. Let F be a closed subset of Rd and J = (J0 , J1 ) : F →
R×Rd a jet of norm c ≥ 0. Then J admits an extension to a jet, which
we again call J, of norm at most Cd · c defined on Rd . In particular,
the mapping J1 = J0′ is Lipschitz on Rd with Lipschitz constant at most
Cd · c. The constant Cd > 0 depends on the dimension d only.
Our crucial Theorem 2.4 is proved by induction. In each induction
step, Φ′ becomes more and more parallel to the spaces Li . To streamline
the proof of Theorem 2.4, we verify its induction step separately.
Lemma 2.3. Let X and Y be two subspaces of Rd with 0 ≤ dim X =
n
m ≤ n = dim Y , and {ei }m
i=1 and {fi }i=1 their orthonormal bases as
in Lemma 1.2. Let z ∈ Rd be orthogonal to both of the spaces X and
Y , w ∈ Rd , and X̃ = X + w + z and Ỹ = Y + z be affine subspaces.
Let Xi = ker ei ∩ X, and X̃i = Xi + w + z for 1 ≤ i ≤ m. Let
J = (J0 , J1 ) : X̃ ∪ Ỹ → R × Rd be a jet of norm c ≥ 0 so that
(i) J1 (X̃) ⊂ X;
(ii) J1 (X̃i ) ⊂ Xi for each i ∈ {1, . . . , m};
(e.g., if X̃ is just a point, then the conditions reduce to J1 (X̃) = 0).
Then the jet K = (K0 , K1 ) : X̃ ∪ Ỹ → R × Rd defined by K0 = J0 and
(
J1
on X̃
K1 =
PY ◦ J1 on Ỹ .
has norm at most 3c.
Proof. Checking that the Lemma holds when m = 0, that is, when X̃
is a point, is just a simpler version of what follows for m ≥ 1 so we
restrict our attention to the latter case.
Let k be as in Lemma 1.2. The spaces X̃ and Ỹ intersect if and only
if z = 0 and they do so in X̃, if k = m and in
span {e1 , . . . , ek } + w =
m
\
X̃i
i=k+1
if k < m. Since J1 (X̃) ⊂ X ⊂ Y by (i) if k = m, and since if k < m
we have by (ii)
!
m
m
\
\
X̃i ⊂
Xi ⊂ Y,
J1
i=k+1
i=k+1
the mapping K1 is well defined.
For this proof we denote PY = P . Clearly, if u, v ∈ X̃, then both
inequalities of Definition 2.1 are satisfied for K.
MONOTONE CURVES
7
If u, v ∈ Ỹ , then (i) of Definition 2.1 is also easily satisfied:
|K1 (v) − K1 (u)| = |P J1 (v) − P J1 (u)| ≤ |J1 (v) − J1 (u)| ≤ c|v − u|.
The core of the proof is checking that (i) holds also if u ∈ X̃ and v ∈ Ỹ .
We then have
|K1 (v) − K1 (u)| = |P J1(v) − J1 (u)|
≤ |P J1 (v) − P J1 (u)| + |P J1 (u) − J1 (u)|
(2)
≤ c|v − u| + |P J1(u) − J1 (u)|.
We denote by Pi the orthogonal projection onto Xi and by P̃i the
orthogonal projection onto X̃i . Since J1 (u) ∈ X and J1 (P̃i u) ∈ Xi by
(ii), we can estimate by Lemma 1.3 as follows:
m
m
X
X
2
2
ai |J1 (u) − Pi J1 (u)| ≤
ai |J1 (u) − J1 (P̃i u)|2
|P J1(u) − J1 (u)| =
i=1
≤ c2
m
X
i=1
ai |u − P̃i u|2 ≤ c2 |PỸ u − u|2 ≤ c2 |v − u|2 .
i=1
Hence by (2),
(3)
|K1 (v) − K1 (u)| ≤ 2c|v − u|.
It remains to verify the second inequality of Definition 2.1. If u ∈ X̃ ∪ Ỹ
and v ∈ Ỹ , then
|K0 (v) − K0 (u) − hK1 (u), v − ui|
=|J0 (v) − J0 (u) − hJ1 (u), v − ui| ≤ c|v − u|2 ,
since for u − v ∈ Y , we have hP J1 (u), v − ui = hJ1 (u), v − ui. If
conversely v ∈ X̃ and u ∈ Ỹ , then by (3),
|K0 (v) − K0 (u) − hK1 (u), v − ui| = |J0 (v) − J0 (u) − hP J1(u), v − ui|
≤ |J0 (u) − J0 (v) − hJ1 (v), v − ui| + |hJ1 (v), v − ui + hP J1 (u), v − ui|
≤ c|u − v|2 + |K1 (u) − K1 (v)| · |u − v| ≤ 3c|u − v|2 .
Here is our main extension result, a Tietze-type theorem involving
derivatives. Given two points a and b in Rd with |b − a| = 1, there is a
differentiable function Φ, so that Φ(b) − Φ(a) = 1. On K given affine
spaces, the derivative of Φ is parallel to these spaces. Moreover, the
Lipschitz constant of Φ′ depends on K and d only. For our applications
it would be even better if the Lipschitz constant of Φ′ depended solely
on K. The current proof, which uses Theorem 2.2, does not provide
this, however.
8
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
Theorem 2.4. Let L1 , L2 , . . . , LK be subspaces of Rd and L̃i their
affine translates. Let a, b ∈ Rd be two points with |b − a| = 1. There
exists a differentiable function Φ : Rd → R, so that
(i) Φ(b) − Φ(a) = 1;
(ii) Φ′ (L̃i ) ⊂ Li for i = 1, . . . , K;
(iii) the mapping Φ′ : Rd → Rd is Lipschitz with a constant c depending on K and d only.
Proof. Here is a brief outline of the proof.
We first use Lemma 1.2 repetitively to construct a family L of affine
subspaces of Rd starting with L̃1 , L̃2 , . . . , L̃K , continuing with a system
of their hyperplanes, then with a system of hyperplanes of the hyperplanes and so on, finishing eventually with a system of lines and finally
with a system of points. The maximal possible number N of the spaces
in the family L depends on K and d only.
The first approximation of Φ is the linear functional w = b − a.
We keep improving on “Φ” in several inductive steps. First, we go
consecutively through all the points in L, and make sure Φ′ vanishes
there, then through all the lines in L, and make sure that Φ′ stays
on each particular line parallel to that line, then take care of the 2dimensional spaces, and so on. In the n-th step we first use Lemma 2.3
to force the derivative to be on the n-th affine space of L parallel to
that space. Then we use Theorem 2.2 to extend the jet (Φ, Φ′ ) from
the first n spaces of L to Rd . At the end we obtain Φ which satisfies
(ii) for all the affine spaces in the scheme L, not just for L̃1 , L̃2 , . . . , L̃K .
The Lipschitz constant of Φ′ increases in every step, but since we have
at most N steps it remains bounded by a function of K and d.
Here is a more detailed proof.
First we describe how two affine subspaces X̃ and Ỹ of dimension at
least one (we do not consider points for this procedure) of Rd give rise
to new affine subspaces of smaller dimension. According to Lemma 1.1,
they can be written in the form X̃ = X + w + z and Ỹ = Y + w, where
X and Y are subspaces and z is orthogonal to both of them. Let {ei }
and {fi } be orthonormal bases of X and Y as specified in Lemma 1.2.
If dim X < dim Y we include in the new family of spaces all affine
spaces X̃i = w + z + X ∩ ker ei . Notice, that if the space X̃ is a line,
these are just points. If dim X = dim Y we include also w + Y ∩ ker fi .
We use the above procedure first for all pairs from the family L1 =
{L̃1 , . . . , L̃K }. As these spaces are at most d − 1 dimensional (a space
of full dimension imposes no condition on Φ), they give rise to a family
L2 of at most (d − 1)K 2 pieces of at most (d − 2)-dimensional affine
spaces.
MONOTONE CURVES
9
Now we apply the above procedure to all those pairs from the family
L1 ∪ L2 , which we did not consider above. As each such a pair involves
at least one space from L2 , the resulting spaces in the family L3 will
have dimension at most d − 3.
In the third step we apply the procedure to all those pairs of spaces
of dimension at least one from the family L1 ∪L2 ∪L3 which we did not
consider yet. This gives rise to a family L4 of affine spaces of dimension
at most d − 4.
We continue in this manner, until after m ≤ d − 1 steps we obtain
a family Lm consisting of points only (we again emphasize that points
do not partake in the procedure). S
We order the family L = {a, b}∪ m
i=1 Li according to the dimensions:
let a, b, A1 , A2 , . . . , Ak be all the points. Let Ak+1 , Ak+2 , . . . , Al be all
the lines in L; let Al+1 , Al+2 , . . . be all the 2-dimensional affine spaces,
and so on, till the last space AN in L. To construct Φ we proceed
by induction. Let M0 = {a, b}. The first approximation of Φ is the
jet J : M0 → R × Rd of norm one, with J0 (a) = 0, J0 (b) = 1 and
J1 (a) = J1 (b) = 0. According to Theorem 2.2, there is Φ0 : Rd → R so
that the jet (Φ0 , Φ′0 ) extends J with norm c0 ≤ Cd .
Assume Φn : Rd → R so that the jet (Φn , Φ′n ) has norm at most cn
and the set Mn of spaces from L has already been constructed. We set
Mn+1 = Mn ∪ {An+1 } and define a jet K = (K0 , K1 ) : Mn+1 → R × Rd
so that K0 = Φn and
(
Φ′n
on Mn ;
K1 =
′
Pn+1 ◦ Φn on An+1 ,
where Pn+1 is the orthogonal projection on a translated copy of An+1
containing the origin. The procedure we used to construct the families
Li ensures that the assumptions of Lemma 2.3 are satisfied for the jet
K, hence it has norm at most 3cn . According to Theorem 2.2, there
exists Φn+1 : Rd → R, so that the jet (Φn+1 , Φ′n+1 ) extends K and has
a norm cn+1 ≤ 3Cd · cn .
When the induction terminates, we conclude by setting Φ = ΦN . We will use the above result in a form which provides a substitute
for the missing property that w = b − a be parallel to all the spaces L̃i .
Corollary 2.5. Let L̃1 , . . . , L̃K be affine subspaces of Rd , a, b ∈ Rd ,
and Φ : Rd → R be as in Theorem 2.4. Let w = b − a and F : Rd → R
be the function defined by F (x) = hw, xi − Φ(x) for x ∈ Rd . Then
F (b) − F (a) = 0, and if i ∈ {1, . . . , K}, then
hw, vi ≤ hF ′ (x), vi + c dist (x, L̃i ),
10
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
for any x ∈ Rd and v orthogonal to L̃i , with |v| = 1.
Proof. For a given i, let x̃ be the orthogonal projection of x onto L̃i .
Then hΦ′ (x̃), vi = 0 and since Φ′ is c-Lipschitz,
|hw − F ′ (x), vi| = |hΦ′ (x), vi| = |hΦ′ (x) − Φ′ (x̃), vi| ≤ |Φ′ (x) − Φ′ (x̃)|
≤ c|x − x̃| = c dist (x, L̃i ).
3. Alternating projections
Let K be a fixed natural number and let L be a family of K closed
affine subspaces of ℓ2 of finite dimension or codimension. Let z ∈ ℓ2
and k1 , k2, · · · ∈ {1, 2, . . . , K} be arbitrary. Consider the sequence of
projections
z1 = Pk1 z,
(4)
zn = Pkn zn−1 ,
where Pk denotes the orthogonal projection on the k-th subspace in
L. The orbit {zi } is always bounded according to [ADW], [BGP], and
[Me].
In this section we prove an estimate of the diameter of the orbit:
qX
∞
(5)
diam {zi }i=1 ≤ c(K, n)
|zi+1 − zi |2 ,
where the constant c(K, n) > 0 depends only on the number K of the
affine spaces and their maximal dimension or codimension n. This is of
interest mainly when L is a family of subspaces containing the origin,
as then by the Pythagorean theorem
(6)
k−1
X
|zi+1 − zi |2 = |zj |2 − |zk |2 ≈ 0,
i=j
if j is large enough, since the norms |zi | decrease and hence converge.
The estimate (5) then means that the sequence {zi } is Cauchy and
hence convergent.
The next result with the affine spaces replaced just by lines appears
in [KKM].
Theorem 3.1. Let L be a finite family of closed affine subspaces of ℓ2
of finite dimension or codimension, and let z1 , z2 , . . . be a sequence of
orthogonal projections on them. Then
∞
X
2
∞
diam {zi }i=1 ≤ c(K, n)
|zi+1 − zi |2 ,
i=1
MONOTONE CURVES
11
where the constant c(K, n) > 0 depends on the number K of the spaces
and their maximal dimension or codimension n (for each space we
choose the one which is finite) only.
Proof. Let X be the union of the finite dimensional affine spaces in L.
Let Y be the union of the finite dimensional orthogonal complements of
the infinite dimensional affine spaces in L. All zi ’s are contained in the
space Z = span ({z1 } ∪ X ∪ Y ) of dimension d ≤ K(n + 1) + 1. This is
easily seen by induction: zi+1 ∈ X, or zi+1 = zi +(zi+1 −zi ) with zi ∈ Z
and zi+1 − zi ∈ Y . In the d-dimensional space Z we consider a family
L′ of at most K affine subspaces: the finite dimensional affine spaces
from the family L, and the intersections of the infinite dimensional
affine spaces from L with Z. Iterating the projections of z1 on the
spaces from L′ gives exactly the sequence {zi }.
For a fixed m ∈ N with z1 6= zm , we can assume that |z1 − zm | = 1 by
scaling the whole picture by 1/|z1 − zm |. Let γ be the piecewise linear
curve defined by the iterates z1 , z2 , . . . , zm . We will use an arc-length
parametrization γ : [0, s] → Z, such that 0 = s1 < s2 < · · · < sm = s
satisfy γ(si ) = zi . We denote
vi =
zi+1 − zi
∈ S d−1 .
|zi+1 − zi |
Then vi is orthogonal to the ki+1 -st space in L′ and γ ′ (t) = vi for
t ∈ (si , si+1 ). Let a = z1 , b = zm , and let F : Z → R be the function
from Corollary 2.5 corresponding to the family L′ of affine spaces L̃i .
If t ∈ (si , si+1 ), then dist (γ(t), L̃ki+1 ) = si+1 − t, and by Corollary 2.5
for w = b − a,
hw, γ ′(t)i = hw, vii ≤ hF ′(γ(t)), vi i + c dist (γ(t), L̃ki+1 )
= hF ′ (γ(t)), γ ′ (t)i + c(si+1 − t).
12
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
Hence,
2
|z1 − zm | = hw, b − ai = hw, γ(s) − γ(0)i =
=
m−1
X Z si+1
i=1
≤
=
m−1
X
s
hw, γ ′(t)i dt
0
hw, viidt
si
m−1
X Z si+1
i=1
Z
′
′
hF (γ(t)), γ (t)idt + c
si
m−1
X Z si+1
F (zi+1 ) − F (zi ) + c
i=1
m−1
X Z si+1 −si
i=1
= F (zm ) − F (z1 ) + c/2
m−1
X
si+1 − t dt
si
i=1
t dt
0
2
(si+1 − si ) = C
i=1
where C > 0 depends on K and n only.
m−1
X
|zi+1 − zi |2 ,
i=1
Let L be a family of closed subspaces (meeting at the origin) of
ℓ2 of finite dimension or codimension and let {zi } be a sequence of
projections on the spaces in L as defined in (4). It follows from [P],
that the sequence converges in norm. We give an estimate of the rate
of convergence, which is sometimes called “condition (K)” (see e.g.
[DR2]). With a different constant such an estimate was proved for
1-dimensional subspaces in [DR1], and conjectured for 2-dimensional
subspaces in [DR2].
Corollary 3.2. Let L be a finite family of closed subspaces of ℓ2 of
finite dimension or codimension. Let {zi } be a sequence of projections
on the spaces in L as defined in (4). Then for all j ≤ k,
|zj − zk |2 ≤ c(K, n)(|zj |2 − |zk |2 ),
where the constant c(K, n) > 0 depends on the number K of the spaces
and their maximal dimension or co-dimension n (for each space we
choose the one which is finite) only. Consequently, the sequence {zi }
converges in norm.
Proof. Using the proof of Theorem 3.1 and (6), we get in the standard
way that
2
|zj − zk | ≤ c(K, n)
k−1
X
|zi+1 − zi |2 = c(K, n)(|zj |2 − |zk |2 ).
i=j
The sequence {|zi |} is decreasing, hence convergent. By the above
inequality the sequence {zi } is Cauchy, hence also convergent.
MONOTONE CURVES
13
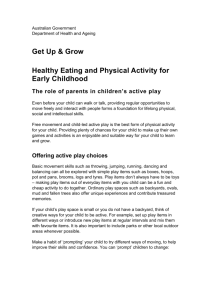
e2
(1 − ε)e2
0
γ1
γ2
e1
Figure 1. A monotone curve γ1 with too many different derivatives and a non-monotone curve γ2 with just
two different derivatives.
4. Monotone curves
We devote the last section of our paper to a somewhat playful question we encountered while wondering about the projections.
Let γ be a curve in ℓ2 such that the distance from the origin decreases as we move along the curve (see Fig. 1). If, for example, {zi }
is a sequence of projections on closed subspaces of ℓ2 , the piecewise
linear curve which arises by connecting these points is monotone in the
above sense. If the subspaces are, moreover, say K hyperplanes, each
segment of the curve is parallel to one of the K normal vectors of these
hyperplanes. We wondered if “long” monotone curves with only a few
different derivatives exist arbitrarily close to the unit sphere of ℓ2 . For
example, given ε > 0 arbitrarily small, does there exist a piecewise linear monotone curve connecting e1 with (1 − ε)e2 the segments of which
are parallel to at most 5 different vectors? The methods developed in
the previous sections enable us to show that for small ε there is no such
a curve.
Theorem 4.1. Let v1 , . . . , vK be unit vectors in ℓ2 . Assume γ : [0, s] →
ℓ2 is an absolutely continuous curve with endpoints a and b so that
(i) the distance |γ(t)| from the origin is a decreasing function of t
on [0, s], and
14
B. KIRCHHEIM, E. KOPECKÁ, AND S. MÜLLER
(ii) γ ′ (t) ∈ {v1 , . . . , vK } for almost all t ∈ [0, s].
Then |a − b|2 ≤ c(|a|2 − |b|2 ), where the constant c = c(K) > 0 depends
only on the number K of the different derivatives of γ.
Proof. We can assume that γ is a curve in RK+1 , because for t ∈ [0, s],
Z t
γ(t) = a +
γ ′ (τ ) dτ ∈ span {a, v1 , v2 , . . . , vK },
0
and the latter is a space of dimension d ≤ K + 1. Scaling the whole
picture by 1/|b − a|, we can assume that |b − a| = 1. Let L̃i = ker vi ⊂
RK+1 for i = 1, . . . , K, let w = b − a, and let F be the function
from Corollary 2.5. Since dist (x, L̃i ) = |hx, vii| for any x ∈ RK+1,
Corollary 2.5 applied to x = γ(t) and v = γ ′ (t) implies that
(7)
hw, γ ′(t)i ≤ hF ′ (γ(t)), γ ′ (t)i + c|hγ(t), γ ′ (t)i|,
for almost all t ∈ [0, s], where c = c(K, K + 1) depends on K only.
Since |γ(t)|2 decreases along [0, s],
0 ≥ (|γ(t)|2 )′ = 2hγ(t), γ ′(t)i,
and we can write (7) equivalently as
hw, γ ′(t)i ≤ hF ′ (γ(t)), γ ′ (t)i − chγ(t), γ ′ (t)i.
Hence
Z
2
s
|a − b| = hw, b − ai = hw, γ(s) − γ(0)i =
hw, γ ′ (t)i dt
0
Z s
Z s
≤
hF ′ (γ(t)), γ ′ (t)i dt − c
hγ(t), γ ′ (t)i dt
0
0
c
= F (γ(s)) − F (γ(0)) − (|γ(s)|2 − |γ(0)|2)
2
c
2
= F (b) − F (a) + (|a| − |b|2 ) = C(|a|2 − |b|2 )
2
for a constant C > 0 depending on K only.
References
[ADW] R. Aharoni, P. Duchet, B. Wajnryb, Successive projections on hyperplanes,
J. Math. Anal. Appl. 103 (1984), 134–138.
[AA]
I. Amemiya and T. Ando, Convergence of random products of contractions
in Hilbert space, Acta. Sci. Math. (Szeged) 26 (1965), 239-244.
[BGP] I. Bárány, J.E. Goodman, R. Pollack, Do projections go to infinity?, Applied geometry and discrete mathematics, 51–61, DIMACS Ser. Discrete
Math. Theoret. Comput. Sci., 4, Amer. Math. Soc., Providence, RI, 1991.
[DR1] J. M. Dye, S. Reich, On the unrestricted iteration of projections in Hilbert
space, J. Math. Anal. Appl. 156 (1991), 101-119.
MONOTONE CURVES
15
[DR2]
J. Dye, S. Reich, Random products of nonexpansive mappings, Pitman
Research Notes in Mathematics Series, Vol. 244, Longman, Harlow, 1992,
106-118.
[H]
I. Halperin, The product of projection operators, Acta Sci. Math. (Szeged)
23 (1962), 96-99.
[KKM] B. Kirchheim, E. Kopecká, S. Müller, Do projections stay close together?,
J. Math. Anal. Appl. 350 (2009), 859-871.
[KR]
E. Kopecká, S. Reich, A note on the von Neumann alternating projections
algorithm, J. Nonlinear Convex Anal. 5 (2004), 379-386.
[Me]
R. Meshulam, On products of projections, Discrete Math. 154 (1996), 307–
310.
[vN]
J. von Neumann, On rings of operators. Reduction theory, Ann. of Math.
50 (1949), 401-485.
[P]
M. Práger, Über ein Konvergenzprinzip im Hilbertschen Raum, Czechoslovak Math. J. 10 (1960), 271-282 (in Russian).
[Sa]
M. Sakai, Strong convergence of infinite products of orthogonal projections
in Hilbert space, Appl. Anal. 59 (1995), 109-120.
[S]
E.M. Stein, Singular integrals and differentiability properties of functions,
Princeton University Press. XIV, Princeton, 1970.
Mathematisches Institut der Heinrich-Heine-Universität, Düsseldorf,
D-40225 Düsseldorf, Germany
E-mail address: kirchheim@math.uni-duesseldorf.de
Mathematical Institute, Czech Academy of Sciences, Žitná 25, CZ11567 Prague, Czech Republic
and
Institut für Analysis, Johannes Kepler Universität, A-4040 Linz,
Austria
E-mail address: eva@bayou.uni-linz.ac.at
Institute for Applied Mathematics, University of Bonn, Poppelsdorfer Allee 82, D-53115 Bonn, Germany
E-mail address: sm@mis.mpg.de
 0
0
advertisement
Related documents








Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users