5-segment square-root approximation - RV
advertisement

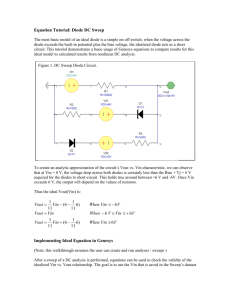
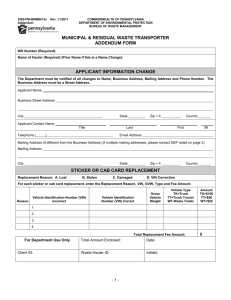
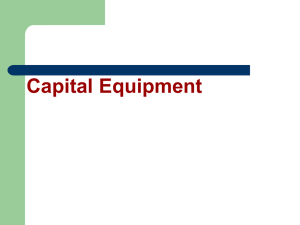
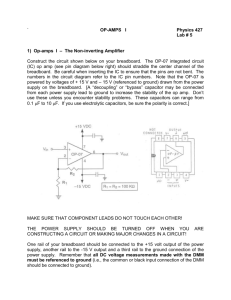
AVS-48 Picobridge® Project Application Note Five-segment square root approximation INTRODUCTION DESIGN GOAL It can be sufficient to approximate an analog square-root function cheaply by a few linear segments in applications, where the function needs not be very accurate. Linearisation of a temperature controller’s heating power vs. its PID output [PH = RH * I2] is an example. In a closed-loop control system, accuracy is mainly determined by circuits other than the power output stage. Without such a linearisation, the closed-loop gain will change with the sample’s heat load [PH = RH * (I + ILOAD)2]. This can make it more difficult to optimise the PID settings in terms of speed and stability. The following simple circuit approximates the function The operational amplifiers in our AVS-48 will be powered with +/- 5 Volts and therefore all signal voltages must be limited to +/- 3 Volts. The square-root circuit is placed after the PID section, which delivers +3V at maximum, and before the heater power stage, which requires +3V for maximum output current. Figure 1 shows sqrt(VIN) where 0.. VIN..+3V (curve a). When sqrt() is approximated by linear segments, each segment line has a smaller slope than its predecessor. We need an attenuator, whose attenuation increases stepwise at each corner point for input voltages that rise higher than the corner voltage. The first segment must naturally start from zero and it has the steepest slope. (1)VOUT = 3 * sqrt(VIN) / sqrt(3) using one quad and one single low-cost operational amplifier plus 12 resistors. The simplest solution would be to design an attenuator for sqrt(VIN), and because sqrt(3)=1.73, amplify the result by 3/1.73. Then +3V input would yield +3V output, as de- SQRT(Vin) 2 1.8 sqrt(Vin)*3/sqrt(3) curve a 1.6 slope=1 Output (V) 1.4 1.2 1 0.8 sqrt(Vin)*0.5/sqrt(3) curve b 0.6 0.4 0.2 the first segment has slope=1, 0 0 0.5 1 1.5 2 2.5 3 Vin (V) Fig. 1. Square root of VIN and the same scaled down RV-Elektroniikka Oy PICOWATT Veromiehentie 14 FI-01510 VANTAA, Finland phone +358 50 337 5192 e-mail: reijo.voutilainen@picowatt.fi Internet: www.picowatt.fi Revised: 2013-09-01 square_root_approximation.indd RV-Elektroniikka Oy PICOWATT Page 1 AVS-48 Picobridge® Project Application Note Five-segment square root approximation sired. But the steepest slope for an attenuator is 1 (= no attenuation). If a line with slope 1 is drawn from the origin, it can be seen that the error to the real sqrt function is very large, see Fig.1. This can be avoided by scaling down the square root so, that the maximum output for 3V input is much less than 1.73V. The scaling factor is a compromise between accuracy of the first segment and offsets of the 5 4 op amp inputs. We chose 0.5V maximum output (Fig.1 curve b ). The attenuator output must then be amplified by (a) a factor of 6.5 4 Vout (a) D P5V D R1 Vin Vc D1 P5V R1 D2 R3 P5V R3 N5V Vout D2 Vc2 N5V R5 Vc2 R5 R2 G=R2/(R1+R2) Vin G=1 Vout (a) R6 G=R2/(R1+R2) (b) G=1 (a) N5V (b) Vout 2 Vref R1 Vin Vc Vc C Vref 3 Vout R2 Vout C 2 Vin P5V Vc Vin 3 R6 D1 R2 R1 some reference voltage VREF so that VC1<VC2. Selection of the corner points is a kind of matter of taste, where one tries to keep the approximation error tolerable within the range where VIN is likely to vary. It is important to notice, that the corner points must be taken from the VOUT axis for calculating the resistors for the VC divider, as shown by Fig. 3b. R2 Vin D3 N5V D3 Vc1 R4 Vc1 R4 Fig. 2. Simple case of two segments B B A A Vc2 PRINCIPLE OF OPERATION The idea is to generate zero-impedance nodes at selected corner voltages. Each node should exhibit infinite impedance for input voltages less than the corner voltage, and zero impedance for input voltages higher than the corner point. These nodes are used for building an attenuator, whose attenuation factor depends on the input voltage. Figure 2a shows the simplest case of only one corner, or two segments. As long as VIN is less than VC, the inverting input is more negative than the non-inverting input. The op amp output is near to the positive supply, diode D1 does not conduct and the right side of R2 sees a very high impedance. VOUT equals VIN because there is no attenuation. But as soon as VIN exceeds the corner voltage VC, the op amp output changes polarity. Diode D1 conducts and the op amp tries to keep its inverting terminal at VC. If the input voltage still increases, the slope of the new growth will be R2/(R1+R2). See Fig. 2b. Figure 3a shows the next step of having two corner points, and it also shows the principle of the final circuit. The two corner points are formed by a simple voltage divider from Revised: 2013-09-01 (b) Vout (b) segment2 Vc1 Vout Vc2 segment1 Vc1 segment3 segment2 segment3 Vin 1: G=1 2: G=R1/(R1+R2) segment1 3: G=R2R3/(R2R3+R1R3+R1R2) Vin 1: G=1 2: G=R1/(R1+R2) Fig. 3. Three segment approximation 3: G=R2R3/(R2R3+R1R3+R1R2) Calculating resistor values for the attenuator is a little tedious. A lot of help is provided by formula (2)VOUT = (VIN /R1 + VC1/R2 + VC2/R3 +…)/ (1/R1 + 1/R2 + 1/R3 +…) Using VIN values corresponding to the corner points, we can solve first for R2, then for R3 and so on, if the circuit has more than two corner points. A spreadsheet program with goal seeking facility is good enough, unless one has to do this calculation frequently. square_root_approximation.indd RV-Elektroniikka Oy PICOWATT Page 2 AVS-48 Picobridge® Project Application Note Five-segment square root approximation Calculating resistor values for the VC divider needs trial and error: one must seek for a combination where all resistors are near to easily available stock values, e.g. from the E96 series (1% metal film). With our stock values, we end up to R6..R10 values shown in Fig. 3. THE FINAL CIRCUIT The function to approximate is (Fig.1 curve b ) (3)VOUT = sqrt(VIN)*0.5/sqrt(3) For calculating the attenuator resistances R1..R5 we use eq. (2) successively, first for R1 and R2, then for R1, R2 and R3 and so on. Each obtained value is replaced by a suitable stock value before the next step in order to prevent errors from cumulating. If no stock value is found, one can try to change R1, but this requires a new start from the beginning. We ended up with values R1.. R5 shown in Fig. 4. The first corner voltage cannot be selected, it is determined by the fact that the first segment starts from zero and its slope is one. The next three corners were chosen visually: for VIN = 0.0834 for VIN = 0.35 for VIN = 0.83 for VIN = 1.6 for VIN = 3 5 The non-inverting amplifier with gain 6 is trivial. Figure 5. shows how this approximation performs. 4 3 INPUT RANGE 0..+3V P5V R1 10K0 0..+0.5V VIN 3 6 1 2 3VREF corner voltages: input output 0.083 0.083 0.35 0.17 0.83 0.265 1.6 0.368 3 0.5 4 R10 100K C U2 TL051 7 D 2 P5V R5 3K57 D4 R12 4K99 4 14 U1D TL054 12 11 0.368V VOUT N5V 1N4148 13 0..+3V 5 VC1 = 0.0834 VC2 = 0.172 VC3 = 0.263 VC4 = 0.365 VC5 = 0.5 R11 1K00 N5V R9 3K92 D3 1N4148 TL054 9 8 10 11 0.265V U1C 4 R4 4K22 R8 3K57 7 5 11 0.172V D2 1N4148 TL054 6 B U1B 4 R3 4K75 R7 3K32 D1 1N4148 TL054 2 1 3 11 0.0834V U1A 4 R2 4K99 A R6 3K16 Title SQUARE ROOT APPR. FI Size A4 Date: Fig. 4. The final circuit Revised: 2013-09-01 square_root_approximation.indd RV-Elektroniikka Oy PICOWATT Document Number <Doc> Friday, July 05, 2013 Page 3 AVS-48 Picobridge® Project Application Note Five-segment square root approximation 5-SEGMENT APPROXIMATION measured performance 3.5 0.25 3 0.2 sqrt(Vin)*3/sqrt(3) Vout (v) 2.5 0.15 2 0.1 segment approximation 1.5 0.05 1 0 error 0.5 -0.05 0 -0.1 0 0.5 1 1.5 2 2.5 3 Vin (v) Fig. 5. Calculated (yellow) and approximated (red) square root. The blue curve and y-axis on the right show approximation error. Picobridge® is a registered trademark of RV-Elektroniikka Oy Picowatt Revised: 2013-09-01 square_root_approximation.indd RV-Elektroniikka Oy PICOWATT Page 4