SQUARE-ROOT WAVELET DENSITIES AND SHAPE ANALYSIS
advertisement

SQUARE-ROOT WAVELET
DENSITIES AND SHAPE ANALYSIS
Anand Rangarajan, Center for Vision, Graphics and Medical Imaging
(CVGMI), University of Florida, Gainesville
Square-root densities
Walking the straight and narrow….on a sphere
Square-root densities
Wavelets
p( x) =
∑
k
Shape is a point on hypersphere
due to Fisher-Rao geometry
α
j0 , k
φ
j0 , k
( x) +
∞
∑
β j ,kψ
j ≥ j0 , k
j ,k
( x)
Wavelet Representations
Father
Mother
Wavelets can approximate
any f∊ℒ2, i.e.
∞
f ( x) =
Translation index
∑
k
α
j0 , k
φ
j0 , k
( x) +
∑
β j ,kψ
j ≥ j0 , k
j ,k
( x)
Resolution level
Only work with compactly supported, orthogonal
basis families: Haar, Daubechies, Symlets, Coiflets
Expand
p,
Not p !
Expand in multi-resolution basis:
∞
p( x) =
∑
k
j0 , k
φ
j0 , k
j0 , k , β
j ,k ) =
∑
k
∑
( x) +
α
β j ,kψ
j ≥ j0 , k
Integrability constraints:
h(α
α
2
j0 , k
+
∞
∑
β
j ≥ j0 , k
2
j ,k
j ,k
( x)
=1
Estimate coefficients using a constrained maximum
likelihood objective:
N
∞
2
2
2
L (Θ ) = − log ∏
p ( xi | Θ ) + λ ∑ α j ,k + ∑ β j ,k − 1
i= 1
Asymptotic Hessian of
negative log likelihood
(
)
E{ H
}=
4I
Objective is
Lconvex
k
0
j ≥ j0 , k
{
where Θ = α
j0 , k
,β
j ,k
}
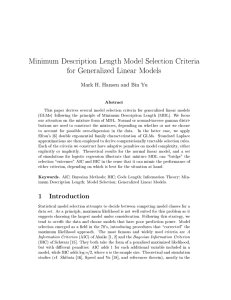
2D Density Estimation
Density
WDE
KDE
Basis
ISE
Fixed BW
ISE
Variable
BW ISE
Bimodal
SYM7
6.773E-03
1.752E-02
8.114E-03
Trimodal
COIF2
6.439E-03
6.621E-03
1.037E-02
Kurtotic
COIF4
6.739E-03
8.050E-03
7.470E-03
Quadrimodal
COIF5
3.977E-04
1.516E-03
3.098E-03
Skewed
SYM10
4.561E-03
8.166E-03
5.102E-03
Peter and Rangarajan, IEEE T-IP, 2008
Shape L’Âne Rouge: Sliding Wavelets
How Do We Select the Number of
Levels?
In the wavelet expansion of p we need set j0
(starting level) and j1 (endingj level)
p( x) =
∑
k
α
j0 , k
φ
j0 , k
( x) +
1
∑
β j ,kψ
j > j0 , k
j ,k
( x)
Balasubramanian [32] proposed geometric
approach by analyzing the posterior of a model
p(M) ∫ p(Θ ) p( E | Θ )dΘ
class
p(M | E ) =
p( E )
The model selection criterion (razor)
is
k N
V (M )
ˆ
ˆ
R(M ) = − ln p( E | ΘR()M
+ ) =ln(− ln p) (+ Eln| Θ∫ ) +det
lng ij (Θ )dΘ +
V ˆ (M )
2 2π
Θ
ML fit
Scales with
parameters and
samples.
Volume of model
class manifold
~ (Θˆ )
det
g
1
ij
ln
ˆ)
detofgdistinguishable
2 Volume
(
Θ
ij
ML
distributions
around
Total volume of manifold
Ratio of expected Fisher
to empirical Fisher
Connections to MDL
Volume around MLE
Last term of razor disappears
k
2
2π det g ij (Θˆ )
VΘˆ (M ) =
N det g~ij (Θˆ )
1
2
det gij (Θˆ )
→ 1, N → ∞
G(Θ ) =
det g~ij (Θˆ )
This simplification leads to
k N
~
ˆ
⇒ R (M ) = MDL = − ln p( E | Θ ) + ln( ) + ln ∫ det gij (Θ )dΘ
2 2π
Geometric Intuition
fe
e
r
p
r
o
ra z e se .
e
Th
th
Space of distributions
rs
Counting volumes
MDL for Wavelet Densities on the
Hypersphere
saupto50Color
Space of distributions
Intuition Behind Shrinking Surface Area
Volume gets pushed into corners as dimensions
increase.
d
Vs/Vc
1
1
2
.785
3
.524
4
.308
5
.164
6
.08
In 100 dimensions diagonal of unit length for
sphere is only 10% of way to the cube diagonal.
Nested Subspaces Lead to Simpler
Model Selection
Hypersphere dimensionality remains the same with
MRA
k=
k
2
+
k
2
=
k
2
+
k
4
+
k
4
=
It is sufficient to search over j0, using only scaling
functions for density estimation.
MDL is invariant to MRA, however sparsity not
considered.
Other Model Selection Criteria
Two-term MDL (MDL2) (Rissanen 1978)
k N
2
ˆ
MDL = − ln p( E | Θ ) + ln
2 2π
Akaike Information Criterion (AIC) (Akaike 1973)
AIC = − 2 ln p( E | Θˆ ) + 2k
Bayesian Information Criterion (BIC) (Schwarz 1978)
BIC = − 2 ln p( E | Θˆ ) + 2k ln( N )
Also compared to other distance measures
Hellinger divergence (HELL)
Mean Squared Error (MSE)
L1
1D Model Selection with Coiflets
Density
Gaussian
Skewed
Uni.
Str.
Skewed
Uni.
Kurtotic
Uni.
Outlier
Bimodal
Sep.
Bimodal
Skewed
Bimodal
Trimodal
Claw
Dbl. Claw
Asym.
Claw
Asym.
Dbl. Claw
COIF1 (j0)
COIF2 (j0)
MDL3
MDL2
AIC
BIC
MSE
HELL
L1
MDL3
MDL2
AIC
BIC
MSE
HELL
L1
0
0
1
0
1
1
1
-1
-1
0
-1
0
0
0
1
1
1
1
2
1
1
0
0
1
0
1
0
1
2
2
3
2
4
3
3
2
2
2
2
4
2
3
2
2
2
1
4
2
2
2
2
2
2
2
2
2
2
2
3
2
5
3
4
2
2
2
2
4
2
4
1
0
1
0
2
1
1
0
0
0
0
1
0
1
1
1
2
1
2
1
2
1
1
1
1
1
1
1
1
1
1
1
2
2
2
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
2
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
1
0
1
0
2
1
1
0
0
0
0
1
0
1
2
1
2
1
3
2
3
2
1
2
1
3
2
3
1
1
1
0
2
1
2
0
0
2
0
2
2
2
BIC, j0=0
MDL3, j0=1
MSE, j0=4
MDL3, j0=2
MDL3 vs. BIC and MSE
Part III Summary
Simplified geometry of p allows us to compute the
model volume term of MDL in closed form.
Misspecified models can be avoided by assuring
we have enough samples relative to the number of
coefficients in the wavelet density expansion.
Leveraged the nested property of the hypersphere
to restrict the parameter search space to only
scaling function start levels.
MDL for WDE provides a geometrically motivated
way to select the decomposition levels for wavelet
densities.
Shape L’Âne Rouge
A red donkey solves Klotski
Shape L’Âne Rouge: Sliding Wavelets
Geometry of Shape Matching
ap
oint Shape
on h is
ype
rsph
ere
Point set representation
Wavelet density estimation
Fast Shape Similarity Using Hellinger Divergence
D( p1 || p2 ) =
∫(
p(x | Θ 1 ) −
(
= 2 − 2 Θ 1T Θ
2
)
)
2
p ( x | Θ 2 ) dx
Or Geodesic Distance
D( p1 , p2 ) = cos − 1 (Θ 1T Θ 2 )
Slidin
Localized Alignment Via
g
1
1
1
0 0 3 0 0 0 3 0 0 0 3 0 0 0 0 0
T
1
1
1
0 0 0 0 0 3 0 0 0 3 0 0 0 3 0 0
Local shape differences will cause coefficients to
shift.
Permutations ⇒ Translations
Slide
coefficients back into alignment.
T
Penalize Excessive Sliding
Location operator, r ( j , k ) , gives centroid of each (j,k) basis.
Sliding cost equal to square of Euclidean distance.
Sliding Objective
Objective minimizes over penalized permutation
assignments
or
(1)
( 2)
(1)
( 2)
t
a
r
E (π ) = − ∑ α j0 , kα j0 ,π ( k ) + ∑ β j , k β j ,π ( k )
pe
o
n
o
j0 , k
j > j0 , k
i
t
n
ca
o
atio
t
L
2
u
2
m
r
e
+ λ ∑ r ( j0 , k ) − r ( π ( j0 , k ) ) + ∑ r ( j , k ) − r (π ( j , k ) )
P
h
e ig
t
W
y
t
l
via
na
PeSolve
j0 , k
j ,k
linear assignment using cost matrix
C = Θ 1Θ + λ D
T
2
Θiis vectorized list of ith shape’s coefficients and
D is the matrix of distances between basis locations.
where
Effects of λ
Peter and Rangarajan, CVPR 2008
Recognition Results on MPEG-7 DB
All recognition rates are based on MPEG-7 bullseye criterion.
D2 shape distributions (Osada et al.) only at
Summary
The geometry associated with the p wavelet
representation allows us to represent densities as
points on a unit hypersphere.
For the first time, non-rigid alignment can be
addressed using linear assignment framework.
Advantages of our method: no topological
restrictions, very little pre-processing, closed-form
metric.
Sliding wavelets provide a fast and accurate
method of shape matching