A Review of Computational techniques for Rotor Wake Modeling
advertisement

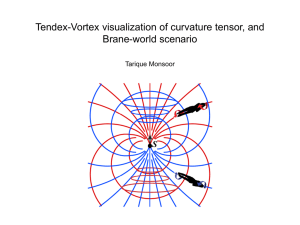
AIAA-00-0114 A REVIEW OF COMPUTATIONAL TECHNIQUES FOR ROTOR WAKE MODELING Nathan Hariharan* CFD Research Corporation, Huntsville, AL 35805 Lakshmi N. Sankar † School of Aerospace Engineering Georgia Tech, Atlanta, GA 30332-0150 ABSTRACT This paper discusses existing techniques for modeling the rotor wake in hover and in forward flight. It also briefly review extensions of these methods for modeling complete rotorcraft. The review is followed by results from promising high order overset methods for wake capturing, and efficient hybrid near field Navier-Stokes wake capturing/far-field potential flow wake convecting methodologies. The paper concludes with some speculations on the likely advances in rotorcraft flowfield modeling in the forthcoming years. INTRODUCTION The flow field around a rotor, whether in forward flight or hover, is difficult to model due to the presence of strong vorticity. The flow phenomena for a rotor differ from that for a wing in forward flight, because of the differing influence of their respective wakes. For a wing in forward flight, the generated tip vortex and the vortex sheet are quickly convected away from the wing, and the wake influence on the flow field in the vicinity of the wing is small. For an adequate numerical simulation of a wing in forward flight, it is sufficient to capture the generated tip vortex in the vicinity of the wing. In contrast, in the flow field around a rotor, the strong vortex wake system lingers in the vicinity of the rotor. In hover, the strong tip vortex coils beneath the rotor, and significantly alters the effective angle of attack seen by the rotor [1]. Accurate numerical prediction of aerodynamic parameters such as thrust coefficient and induced torque coefficient requires an accurate modeling of the tip vortex. In forward flight the entire vortex system is * Senior Engineer, AIAA member † Regents Professor, AIAA Associate Fellow Copyright© 2000 by CFD Research Corporation. Published by the American Institute of Aeronautics and Astronautics, Inc., with permission. swept back leading to strong interaction between bladetip vortices with successive blades, a phenomenon known as the blade-vortex interaction (BVI). These blade vortex interactions results in rapid changes in local flow conditions and are a major source of aerodynamic noise and structural vibration. In addition, in high-speed forward flight, the advancing blade experiences transonic flow conditions leading to the formation of shocks and shock-boundary layer interactions. The retreating blade experiences a rapid variation in the effective pitch angle that causes a threedimensional dynamic stall. "First-principles" based analyses are needed to understand and predict the highspeed phenomenon. Methodologies that solve for the flow field from the basic conservation laws without using additional information (information from analyses such as other numerical formulations, analytical formulations, or experimental observations) are generally referred to as "First-principles" based methods. In modern helicopter designs, the rotor disk is placed very close to the fuselage for compact configurations, and to reduce drag associated with the mast. In such configurations the vortex system generated by the rotorblades interacts with the body surface in a complex unsteady manner. Rotors and airframes designed without taking into effect the rotor-airframe aerodynamic-interaction often tend to perform much below their design capability [2]. The underlying issue in modeling these flows is the necessity to properly account for the complex vortex system generated by the rotor. Researchers in the past two decades have adopted a broad class of methodologies with various levels of complexity to model the vortex system. This paper will review the existing methodologies for modeling rotors in hover, forward flight, and rotor and airframe interactions. Particular attention will be given to Navier-Stokes based methods for modeling the rotor wake. The next section presents a brief summary of this paper. 1 American Institute of Aeronautics and Astronautics AIAA-00-0114 SCOPE OF THE PRESENT WORK Several excellent survey articles [McCroskey[46], Srinivasan and Sankar[71], Landgrebe[79] are available that summarize rotorcraft flow simulation efforts. The present work is not intended to be an all-inclusive survey of rotorcraft wake modeling. In this effort we briefly review recent efforts at modeling rotor-wake, with the emphasis on Navier-Stokes based “firstprinciples” wake capturing. This is followed by some of our cent results in high order NS methods and hybrid NS/Potential free wake methods that hold good promise in the forthcoming years. We conclude the paper with some speculation on the future makeup of NavierStokes rotorcraft wake-capturing in terms of research and design utility. REVIEW OF ROTORCRAFT FLOWFIELD SIMULATION METHODOLOGIES Simulation of Rotor in Hover and Forward Flight The earliest methods for modeling rotors were based on an extension of Prandtl's lifting line theory for wings. In these techniques, the individual blades were modeled as "lifting line" vortices, and the wake was modeled as a deformed helix. During 1970's, Gray[1], Landgrebe[2,3] and others developed a prescribed wake model to define this helical geometry. Their models were based on experimental observations, such as smoke visualization of the wake. Kocurek and Tangler[4] and Shenoy[5] refined the lifting line method by using a lifting surface representation of the rotor with an improved prescribed tip vortex and inner vortex geometry. The prescribed wake technique is simple and effective but its applicability is limited to rotors having geometry similar to those used in experiments. The lifting line methods require a table look up of airfoil load data, and modeled the unsteady blade wake interactions in a quasi-steady manner. Free wake analysis methods were subsequently developed by Scully[6], Summa[7,8], Bliss and Miller[9] and others. In these methods the tip vortex was modeled as a series of line vortex filaments and was tracked using a Lagrangian technique. These free wake methods accounted for self induced distortions of a rotor wake in forward flight such as roll up. The velocity field was computed using the Biot-Savart law and numerical integration techniques. Johnson [10] used the free wake technique as an option in his computer program CAMRAD (Comprehensive Analytical Model of Rotorcraft Aerodynamics and Dynamics). This program is widely used even to this date to compute inflow velocities, airloads, and rotorcraft performance, stability and control. Caradonna and Isom[11] extended the transonic small disturbance theory which became available during the early 1970's to transonic flow over rotors. This methodology allowed a first principles based study of forward flight conditions and tip effects. In this approach, the effect of the vortex wake was modeled as a table of angle of attack changes, computed from a comprehensive analysis case such as CAMRAD. During early 1980's, Chang[12] modified the full potential flow solver FLO22 for isolated wings to model rotors. Egolf and Sparks[13] modified Chang's work by embedding the vortex element associated with the tip vortex with the potential flow field. Their approaches solved either the steady or quasi-steady form of the potential flow equation. Sankar and Prichard[14], Sankar et al.[15], Strawn[16], Bridgeman et al.[17], Strawn and Caradonna[18] developed unsteady full potential flow based rotor solvers. In all these applications the rotor wake effects ere computed either using a prescribed wake model or a free wake model such as CAMRAD. The full potential solvers could analyze transonic flow with mild shocks, though in an isentropic manner. Viscous effects were accounted only through a boundary layer correction. Ramachandran et al.[19,20] solved the full potential equation and included the rotor wake effects using a Lagrangian based approach for tracking the vortex filaments. During late 1980's, Euler methods matured to a point where calculation of the rotor flowfield in hover and forward flight was feasible. These methods solved the mass, momentum and energy conservation equations in a time dependent fashion using finite-difference or finite-volume methods. These solvers did not include viscous effects but could analyze the transonic flow with non-isentropic shocks. Sankar et al.[21], Agarwal and Deese[22], and Hassan et al. [23] developed Euler solvers for isolated rotors. Again, the wake effects were modeled as an inflow angle of attack table supplied from a separate comprehensive analysis. Wake and Sankar[24] were one of the first few researchers to develop a Navier-Stokes code to analyze rotor flow fields in hover and forward flight[25]. They used a C-H computational grid and a hybrid ADI implicit time marching algorithm. These terminologies will be explained in the full paper. The rotor wake effects were accounted for using the inflow table. These solvers were computationally expensive, but had all the features required for modeling the advancing blade transonic flow and the retreating blade dynamic stall phenomena. The only drawback of these codes was that they were dependent on external wake models for calculation of inflow velocities. Smith and Sankar and 2 American Institute of Aeronautics and Astronautics AIAA-00-0114 Tsung et al.[26,27] extended this Navier-Stokes code to include the aeroelastic effects and improved the spatial accuracy from second to fourth order using a compact operator implicit scheme. Narramore et al.[28] used Navier-Stokes methods to investigate viscous phenomena over rotors-blades such as flow separation and dynamic stall. Chen, McCroskey and Obayashi[29] used an implicit L-U factorization scheme and an external free wake model to solve forward flight rotor flows. Mello[30], Berezin[31] and Moulton et al.[32] have developed hybrid Navier-Stokes/Full Potential Equation based solvers in an effort to reduce the computation time. Here, the computational domain is divided in to an inner domain comprising of the body and the near wake and an outer domain far from the body. NavierStokes equations are solved in the inner domain and the full potential equation is solved in the outer domain where viscous effects are negligible. They were successful in reducing the computation time by 50% when compared to the full Navier-Stokes computation times. Mello[30] also developed a non-reflective interface boundary condition procedure to eliminate the false acoustic reflections at the Navier-Stokes/Full potential interface boundary. More recently, Moulton et al.[72], Berkman and Sankar et al.[78] have used overset grids for the Navier-Stokes and Potential free wake solutions. During the early 1990's, taking advantage of the enormous improvement in computing capabilities during the 1980s, a new class of Euler/Navier-Stokes codes were developed in an effort to capture the rotor wake from first principles without any need for external wake models. Removing the need for external information that depends on rotor geometry is a big step in the true simulation of the rotor flowfield. These firstprinciples based solvers are particularly useful in analyzing new or complex rotor blades where no experimental data available. Strawn and Barth[33], Srinivasan and McCroskey[34], Srinivasan et al.[35], Srinivasan and Baeder[36], Srinivasan et al.[37], Duque[38], and Duque and Srinivasan[39] solved the hovering rotor flowfields by capturing the rotor wake in an Eulerian fashion, and from first principles. Hariharan and Sankar[40] used high order methods to solve the flow field of rotor in hover from first principles. Bangalore[41] used first-principles based methods to investigate high-lift rotor systems in hover and forward flight. Ahmad and Duque[42] analyzed the AH-1G two bladed rotor in forward flight mode using structured embedded grids. The tip vortices in most of the analyses were captured up to one revolution, beyond which the vortex diffused due to numerical dissipation. In an effort to reduce the numerical dissipation, Steinhoff et al.[43], Wang et al.[44] used vorticity confinement techniques to prevent the tip vortex diffusion. Their idea was to add artificial convective velocities that drive the vorticity field towards the centroid of the vortices. A structured/unstructured grid approach was tried by Duque[45] to solve hovering rotors. A structured grid was used near the blade surface to resolve the boundary layers and unstructured grids were used in the wake. Unstructured grids[46] have a better potential for grid adaptation. It is also easier to add/delete grid cells as required, compared to structured grid methods. However grid adaptation/fine control are difficult to handle in context of unsteady vortex-wake, and hence these methods have not been well developed in the context of rotor-blade wake. In the recent past overset grid structured methods have (Ahmed, Strawn[72], Hariharan[75]) have moved far ahead of unstructured methods for wake capturing. The relative ease of construction of high order schemes with structured grids and the simplicity of using Cartesian background overset wake grids have thrust high order overset methods of various flavors[74-77] as the most likely candidate to capture the entire wake of a rotorblade without resorting to Lagrangean free-wake modeling. Simulation of Rotor-Airframe Interaction Because of the complexity of the rotor-airframe interaction, much of the initial research was based on experiments. Sheridan and Smith[47] reviewed the interactional problem, and classified the categories of interactions. Smith and Betzina[48] studied the interaction between a helicopter rotor and a model fuselage at low speeds. Brand, Komerath, and McMahon[49], Liou et al.[50], Brand[51], Liou[52], Kim[53], and Liou et al.[54] at Georgia Tech have extensively documented the interactional effects of a rotor with a model airframe through a systematic series of experimental studies. Crouse, Leishman, and Bi[55] and his coworkers at the University of Maryland performed similar experiments on an airframe with a simulated tail boom. Researchers at NASA Langley have studied a full scale main rotor and body-ofrevolution airframe model[56]. Egolf and Landgrebe[57] used an uncoupled prescribed wake/source panel analysis to study the interactional problem. Clark and Maskew[58] developed a fully coupled analytical method using a vortex sheet of the rotor wake and the rotor, and doublet panels for the airframe. Mavris[59], Lorber and Egolf[60], and Quackenbush and Bliss[61] used variations of analytical representation of the rotor wake, in their attempt to simulate the rotor-airframe interaction. These 3 American Institute of Aeronautics and Astronautics AIAA-00-0114 methods could accurately model the first order effects of the rotor on the airframe and vice versa, but could not model secondary, viscous effects such as vortexsurface interactions. Eulerian approaches to the interaction problem soon followed. Chaffin and Berry[62], and Zori, Mathur and Rajagopalan[63] used embedded body forces to represent the rotor while solving the viscous flow over the airframe. This approach modeled the rotor as an actuator disk, and was quasi-steady. Affes and Conlisk[64], used a combination of potential flow methods and three dimensional unsteady boundary layer analyses to resolve the central features of strong vortices interacting with curved surfaces. Modeling both the rotor which rotates in space, and the stationary fuselage requires two or more grids that are overset on top of each other and are in relative motion. Following a suggestion from McCroskey[65], Duque[66] analyzed the flow field over the Comanche rotorcraft using overset grids. With this approach, Meakin[68] used overset grids to simulate the flowfield around the Osprey rotorcraft. In these approaches, the formulas that transfer information from one grid to the next, known as the domain connectivity data, were precomputed and stored as tables of influence coefficients. Srinivasan and Ahmad[69] used overset grids to study rotor-center body interaction. The single most determinant factor in rotor performance is the behavior of the shed wake which dominates the rotor acoustics and vibratory loads. Hariharan and Sankar[67] used high order unsteady overset mechanism to study the vortex impingement for an experimental rotor-body setup tested at Georgia Tech. In the next section, we discuss some of our recent results from first-principles high order overset methods and hybrid Navier-Stokes/Potential methodologies for rotor-blade tip-vortex wake capturing. HIGH-ORDER METHODS FOR ACCURATE PREDICTION OF THE WAKE temporal accuracy. The viscous fluxes are computed using central differences. The inviscid fluxes are updated using an approximate Riemann solver, i.e., the numerical flux on the cell faces is given by, F q F1 q R F 1 L A q R q L 2 Baseline Fifth Order ENO Scheme The fifth order formulation in the solver has been developed along the lines of Essentially NonOscillatory (ENO) methods [Hariharan, Ref. 40,67]. The higher order reconstruction comes in the projection stage of the conservative variable, i.e., qL and qR. For a smoothly varying function, these projections are based on the support stencils as shown in the Figure 1a below. Figure 1a. Fifth Order Stencils for Computing Left and Right Primitive Variables The details of the economic implementation of this scheme discussed in [Hariharan, Ref. 67]. The increase in the cost of computation was found to be less than 10% more than the time required for computations of similar flowfield solutions with the third order spatially accurate MUSCL projection. In case a discontinuity is present in the sampling region, i.e., as illustrated in Figure 1b, the sampling stencils are automatically shifted to avoid sampling across the discontinuity, as shown in the Figure 1c below. The discretized form of 3D, unsteady finite-volume version of the Navier-Stokes equation is solved. 6 q J VF VG q F S t i 1 6 (2) (1) Fv S i 1 The above formulation allows for arbitrary motion of the grids. The temporal discretization is done using a three point stencil, and the solution update process uses a Newton iterative solver to achieve third order 4 American Institute of Aeronautics and Astronautics AIAA-00-0114 The stencil shifting near the boundaries and discontinuities is similar to the baseline implementation. Study of Tip Vortex of Rotor in Hover Figure 1b. Illustration of a Distribution with a Discontinuity This study focuses upon the vortex dissipation characteristics using the baseline fifth order ENO scheme for the Caradonna-Tung[11] rotor in hover. This has been simulated widely, including firstprinciples based Navier-Stokes simulations by Srinivasan[36], Hariharan and Sankar[48,75]. In this simulation we look into the velocity distribution across the tip vortex and assess what is needed to resolve a potential BVI in forward flight. A 120*40*60 (streamwise, spanwise, normal) H-H grid system as shown in Figure 3 was used for this simulation. Periodic boundary conditions were used to simulate the second blade. The tip Mach number was 0.44 and the collective pitch was eight degrees. Figure 4a shows iso-vorticity contour (top and side views) showing the captured tip vortex. The tip vortex contraction and descent are very well captured as shown in Figure 4b over the first 180 degrees. The tip vortex is seen to acquire a downward kick as it approaches the following blade. Figure 1c. Adaptive Stencil for Uniformly High Order Solution A third order Newton iterative scheme is used to integrate in time. The time stepping is done in an implicit manner using directional factorization [Hariharan, Ref. 40,67]. Seventh Order Scheme The seventh order extension is considered along similar lines as above. A wider stencil as shown below in Figure 2 is used for the left and right projection. Figure 3. Boundary Conditions for the Solution of Rotor in Hover Figure 2. Seventh Order Stencil for Smooth Flow Conditions Figures 5a-f show the evolution of the vortex over the blade (Figures 5a-c — view from behind the rotor) and its transport underneath the next blade (Figures 5e-f). The vortex strengths are compared by ascertaining the tangential velocity variation across the vortex at zero degree azimuth (right off the blade) and at around 180 degree azimuth (as it passes underneath the next blade). The comparison is shown in Figures 5g-h. It is clearly seen that even though the fifth order scheme (with the current grid structure) has maintained the vortex 5 American Institute of Aeronautics and Astronautics AIAA-00-0114 structure well, the strength itself is well reduced over 180 degrees of vortex convection. A much higher fidelity of the vortex is required if interactional effects such as BVI are to computed with any accuracy. One of the main reasons for the tangential velocity dissipation is that the tip vortex in its natural inboard/downward motion moves out of “high density” grid region near the Top View blade and out into “lower density” grid region in the HH grid system. In the next study, we avoid this by using overset refinement to a wing-tip vortex and make sure that enough points are always provided across the face of the vortex. Side View Figure 4a. Vorticity Iso-Surfaces Showing the Tip Vortex Figure 4b. Comparison of Tip Vortex Position Figure 5. Vortex Evolution and Strength Comparison for Fifth Order Computation with a Single H. Grid (120 x 40 x 60 6 American Institute of Aeronautics and Astronautics AIAA-00-0114 Evaluation of a Baseline Fifth Order ENO Scheme: Wing tip vortex capture for 18 chord lengths A wing grid-vortex grid overset system, as shown in Figure 6a is considered here. The vortex grid extends up to 18 chord length behind the wing trailing edge. In this computation a NACA0015 wing at = 15°, M = 0.18 (tested by McAllister et al. 1991) was used. The vortex formation using high order methods have been validated in an earlier study (Hariharan, Ref. 70). The existing fifth order spatial ENO/third order temporal implicit scheme was used for this study. The purpose of this study is to demonstrate the feasibility of using rotor grids (C or H-H) with self-deforming vortex grid systems to fully capture BVI effects, i.e., capture the tip vortex over 180 degrees of revolution (for a two bladed rotor) with less than 5-10% dissipation of the peak to peak variation of the tip vortex. For a typical rotor blade of aspect ratio (AR) of 6, a 180 degree convection would entail ~18 (pi*AR) chord lengths of vortex transport, which is the same length as the one considered here. The vortex is generated by the wing grid and transferred to the vortex grid. The vortex grid used for this study had 100 streamwise points and 30*30 points at every streamwise station. Movement of a Streamwise Plane Grid-1 Grid-2 Tip Vortex Figure 6b. Schematic of Unsteady Vortex Grid System Figures 7a and 7b show the top and rear view of the self adapted vortex grid and the starting vortex grid. Figure 8 shows the axial momentum component on a crosssection of the vortex. The captured vortex has a positive axial momentum (jetlike) till around the halfway mark of the 18 chords. Then it switches over to a negative axial momentum exhibiting wake like behavior. A real physical vortex exhibits a similar behavior due to viscosity. However, the current simulation is inviscid and such a transition is incorrectly triggered by the dissipation in the numerics. The axial velocity component in a realistic vortex (over a wing or a rotor) plays a important role in the determination of the vortex structure A closer look at the variation of the axial and tangential velocity components reveal the need for accurately capturing the axial velocity. Figures 9a-g shows the axial (black) and tangential (red) velocity components across the vortex at several streamwise stations. Top View Figure 6a. Wing Grid-Vortex Grid Overset System Figure 6b shows a schematic of the self-adaptive vortex tracking grid. The vortex grid adapts itself in the following manner. Initial As the computation progresses, each streamwise crosssection of the vortex grids sense the maximum vorticity and correspondingly shift their position within the streamwise plane of that station. Vortex Grid-2 (as shown in Figure 3.1-2) will derive its position from the position of the streamwise station of Grid-1 that lies in the periodic plane. As the vortex evolves, the vortex grids will ensure that the required 8-10 points across the face of the vortex required by the fifth order computation is made available, thus preventing diffusion. Adapted Figure 7a. Adapted Vortex Grid 7 American Institute of Aeronautics and Astronautics AIAA-00-0114 Back View Adapted Initial Figure 7b. Initial and Adapted Vortex Grid Figure 8. Streamwise Momentum Contours Across Spanwise Section of the Vortex Grid a. x/c = 1.0 b. x/c = 4.0 e. x/c = 9.0 c. x/c = 6.0 f. x/c = 11.0 d. x/c = 8.0 g. x/c = 15.0 Figure 9. Comparison of Axial (red) and Tangential (black) Momentum Variation Across the Vortex Structure of a 3D Vortex and Its Numerical Resolution The following can be ascertained from picture sequences Figures 9a-g. The vortex forming over a wing (or a rotor) is a three dimensional entity as shown in Figure 10. It has a distinct axial velocity component across the vortex, apart from the peak-to-peak tangential velocity variation. The fifth order Euler simulation capturing the vortex (Figures 9a-g) exhibits the following behavior. If the axial velocity is correctly represented, i.e., jetlike, then the peak-to-peak tangential velocity variation remains at a certain value. If the axial velocity dissipates (due to numerical dissipation) below zero, it switches to a wakelike structure changing the peak-to-peak tangential velocity variation to a different lower value. In the current study the axial velocity component switches mode around the 40% mark of the required length of the vortex grid. Thus, to capture the right variation of the peak-to-peak tangential variation, it is necessary to capture the correct axial mode (jetlike versus wakelike). Even if the axial velocity component does not play a big role in a certain physical interaction (say BVI under some conditions), for the purpose of correctly capturing the tangential peak-to-peak variation, the axial velocity component has to be captured correctly. The axial component has much steeper gradients and hence it dissipates faster. The vortex grid used in the current study had 30*30 points in the cutting plane across the vortex. This has to be enhanced twice or thrice the size to capture the vortex without any dissipation using the baseline fifth order ENO scheme. Alternatively we can increase the spatial accuracy further and capture the vortex with the current or even smaller grids. We 8 American Institute of Aeronautics and Astronautics AIAA-00-0114 analyze the performance of a seventh order scheme in the next study. Table 1. Comparison of Run Time Dec Alpha 500 Workstation SCHEME CPU TIME/ITERATION Fifth ENO 13.5 seconds Seventh ENO 17.2 seconds Overset System: Grid-1 - 90x40x30 Grid-2 - 100x30x30 1 iteration - 3 sub-iterations The increased computational expense for the cost of enhancing the fifth to the seventh order scheme is 27% more compared to the fifth order scheme. Figure 10. Schematic of Structure of a 3D Tip-Vortex of a Wing or Rotor Seventh Order ENO Scheme: Wing Tip Vortex Capture for 18 Chord Lengths The analysis of wing vortex convection using fifth order ENO in the previous sections gave definite pointers towards the endgame of this complex puzzle of which method is most practical (at present) towards capturing rotor-tip vortices accurately. With around 810 points across the vortex core the fifth order scheme captures the tangential velocity variation, but the axial velocity tends to get dissipated when the convection distances are more than 10 chord lengths. The question arises if increasing the order of accuracy further will be more effective. To this end the seventh order ENO scheme as outlined earlier was implemented. Of direct interest are the three queries, (i) stability, (ii) increased cost of computation per iteration, and (iii) the pay-offs in terms of its ability to resolve the vortex. The same grid system as in the study for fifth order scheme was considered. To keep the comparisons fair and simple the vortex itself is generated using the baseline fifth order scheme and transferred to the vortex grid. The seventh order scheme is applied to the vortex grid alone. The computation inside the vortex grid is uniformly seventh order accurate, using one-sided stencil shift near the boundaries. The stability was not affected in any way, given that the vortex grid is fairly simple. The same time stepping that was applied using the fifth order computation was retained (the time stepping translates to a movement of one chord length for 50/[Mach number] iterations). The timing comparison between the two schemes is shown in Table 1 below. Finally, we consider the pay-offs. The vortex grid is still 100*30*30. Figure 11 shows the axial momentum contour across a spanwise plane cutting the vortex. The axial momentum variation is captured with very little dissipation over the entire ~18 chord lengths. The axial momentum contour appear diminished in patches towards the 70% mark and the 90% mark. This is because the vortex “wiggles” sideways and the maximum does not always stay in the same plane. Figure 12a-c compare the axial (black) and tangential (red) velocity variation at the 5,50, and 100 percent mark of the length of the vortex grid respectively. The axial component has very little dissipation and the tangential component has no noticeable dissipation. The objective of “realistically” capturing the tip vortex over 180 degrees of revolution has been achieved and bettered. The seventh order scheme requires around 3-5 points across the vortex face to capture both the axial and tangential velocity accurately. Figure 11. u (axial) Momentum Contours Across a Spanwise Section of the Vortex Grid Comparison with the fifth order solution is rather redundant. The seventh order solution vastly outperforms the fifth order solution for the extra effort involved. With the given grid, the fifth order convects up to a distance of ~7 chord lengths before axial momentum is totally mis-captured. The seventh order solution has captured up to ~18 chord lengths with little dissipation and could potentially capture ~40-50 chord lengths (or in terms of the average rotor ~3-4 half-revolutions) with the given grid. 9 American Institute of Aeronautics and Astronautics AIAA-00-0114 Figure 13 shows the axial momentum contours at several streamwise stations. Even the vortex sheet rollup is captured and can be seen eighteen chord length away. Seventh Order ENO Scheme: Wing tip vortex capture for 50 chord lengths As a final demonstration of high order vortex capturing, the simulation in the last section was repeated with the vortex grid extended to 50 chord lengths. The streamwise number of points was increased to 300 to a. x/c = 1.0 keep the streamwise point density approximately the same. The spanwise distribution was retained at 30*30. All the other flow conditions were identical to the simulation in section 4 above. The length of the vortex grid roughly represents 3-4 half-revolutions of rotor-tip vortex, for a rotor of aspect ratio 6. Figure 14 shows the axial momentum iso-surface contour inside the vortex, over the fifty chord lengths of simulation. The axial and tangential momentum variation across the vortex at x/c = 2, 25, and 50 are also shown in the figure. b. x/c = 9.0 c. x/c = 18.0 Figure 12. u (axial), w (tangential) Momentum Variation Across the Vortex at Various Streamwise Sections Figure 13. U-Momentum Contours at Several Streamwise Stations 10 American Institute of Aeronautics and Astronautics AIAA-00-0114 a. x/c =2 b. x/c = 25 c. x/c = 50 Figure 14. Axial-Momentum Iso-Surface Showing the Vortex. Graphs Show Axial (black) and Tangential (red) Momentum Distribution across Vortex The seventh order scheme captures the vortex in its entirety with 3-5 points across the vortex. This simulation has clearly demonstrated the ability of firstprinciples based high order scheme in conjunction with overset refinement (either vortex grid adaptation or placing new overset grid wherever the vortex happens to be) to resolve the vorticity laden flowfields of rotorcrafts. It has been achieved with grid sizes reasonable enough for most workstations and even PC’s in the near future. Even if such high order methods are used capturing 1520 revolutions of the tip vortex is still a daunting task. The helical structure a. is highly unsteady and interacts with itself. Tracking vortices to such lengths using vortex-grids becomes very complex and is fraught with geometrical difficulties and algorithm robustness issues. Vortex-tracking overset grids demonstrated in this paper are best suited for the first few revolutions when it is relatively easy to track the tip vortex. For capturing 15-20 revolutions it is probably best if grid point density is increased uniformly all over the wake – e.g., uniform Cartesian wake grids in a rotor in hover simulation by Ahmad and Strawn[72]. Even with the use of high order methods, this will still entail millions of grid points and routine design computations may be too costly, at present and in the near future. In the next section, we describe a hybrid methodology which tackles wake capturing using a near-field Navier-Stokes and an efficient far-field potential free wake hybrid methodology to take the best out of both the methods. NS/POTENTIAL FREE WAKE HYBRID METHODOLOGY The existing finite difference methodologies for rotorcraft aerodynamics can be divided into two categories depending on their treatment of wake effects. First generation finite difference codes [11,14,18] solved full potential, Euler or Navier-Stokes equations coupled with an external free or rigid wake model. In the second generation Navier-Stokes codes, an attempt was made to capture the shed vorticity and the tip vortex entirely from first principles [33-36]. This approach requires significant computer resources even when high order spatial accuracy schemes are used, due to the high levels of numerical viscosity present in these schemes, particularly on coarse grids far away from the rotor disk. Although some attempts in the past have been made to reduce the computer time through the use of a hybrid Navier-Stokes/full potential method [31] in such methods the rotor wake is captured by Eulerian approaches and is not adequately resolved away from the rotor. The only exception to these methods is a hybrid Navier-Stokes/full potential method of Moulton and Caradonna [73], where a Lagrangean approach was used to track the vortex filaments once they leave the Navier-Stokes zone and enter the potential flow zone. In this approach, a hybrid method is developed to solve for the flow field over multi-blade rotors in hover or forward flight. In the present study, only the hover calculations are considered. 11 American Institute of Aeronautics and Astronautics AIAA-00-0114 The flow is divided into three regimes: (a) a small viscous region surrounding individual rotor blades, (b) a potential flow region which carries the acoustic and pressure waves generated by the rotor to far field, and (c) a Lagrangean scheme for capturing the vorticity that leaves the viscous region and convecting it away to the far field. Figure 15 shows the Navier-Stokes and potential flow zones, and a typical vortex trajectory. In the viscous region, the unsteady compressible Navier-Stokes equations are solved in a finite volume form. In the inviscid region, the isentropic potential flow equations are solved. The effect of vorticity embedded in the potential flow region is computed using Biot-Savart law. Mathematical details of all the equations involved is described in Reference 18. Although there are many similarities between the present work and earlier works of Berezin [31] and of Moulton [73], there are several notable differences. For example in Berezin’s work only the near wake was captured. The effects of far wake had to be implemented as a user-supplied induced angle of attack table. In Moulton’s work, the Navier-Stokes zone was modeled using a C-grid which extended from one blade periodic boundary to next, and was large. The present work uses a very small H-grid enclosing the blade which can potentially grow or shrink with time. Finally, the present formulation is cast as an unsteady problem, so that steady and unsteady forward flight calculations may be done with a single solver. Of course, time saving approaches such as use of local time stepping may be used in our work in hover applications to accelerate convergence. UH-60A Rotor in Hover The hover solver is also validated for a typical current generation rotor, the four bladed UH-60A rotor. The blade has an aspect ratio of 15.3 and a maximum twist of 13. The blade has a rearward sweep of 20 starting from a rotor radius of 93%. The blade is made up of two airfoil sections, SC1095 as the main airfoil and SC1095R8 section in the mid-span [80]. The H-O grid is shown in Figure 15 has a size of 90*43*80. Approximately 37% of the nodes lie in the NavierStokes zone. In these calculations, the tip vortex strength was chosen initially to be the bound circulation at 99% radius. After several hundred iterations, the peak bound circulation was used as the tip vortex strength. The calculations were started with a rigid, non-contracting wake. At every 10 blade rotation wake geometry and the wake induced velocity were updated. Figure 16 shows the surface pressures at 4 radial stations. The rotor is at a collective pitch angle of 9 and M tip 0.628 . The results are in reasonable agreement with the experimental measurements, except that the suction peak is underestimated at the tip section. No trimming was used to match the thrust coefficient values. Figure 15. H-H Grid Computation for Hybrid NS/Potential Free-Wake Methodology 12 American Institute of Aeronautics and Astronautics AIAA-00-0114 Figure 16. Surface Pressure Coefficients for UH-60A Rotor at Various Radial Stations FUTURE OUTLOOK Rotorcraft wake modeling efforts are at an interesting juncture. In the coming years one can expect a multitude of methodologies — high order overset, vorticity confinement, compact schemes, hybrid wake capturing/Lagrangian convection, etc. — being assembled together to tackle the issue of wake resolution at different levels. In this paper the advantages of ENO based high order methods in capturing wake vorticity were outlined. In the recent years various other approaches to building high order schemes for rotor wake capturing have been proposed. Schemes such as DRP schemes [Hall, Long Ref. 76] and projected MUSCL [Tang and Baeder, Ref. 77] have been tried out rotorcraft wakes with varying degree of success. Compact high order schemes – schemes that use information only from any given cell and its neighbours – such as Discontinuous Galerkin[ Hariharan, Ref. 81] have been only moderately successful for 3D unsteady vortex capturing so far. More research is needed to refine high order methods further to arrive at an optimal scheme applicable uniformly in overset grid settings. An alternative to using high order methods without resorting entirely to Lagrangean markers is the use of vorticity confinement [Steinhoff, Ref. 74]. This method modifies momentum equations to prevent vortex diffusion. It should be further explored to see how such methods perform for full-fledged rotor computations. Eventually the gains of the higher order methods, confinement methods needs to be incorporated into full-fledged first-principles computations such as the hover simulation by Ahmed and Strawn[72]. In this simulation they used approximately 20 million overset grid cells for solving rotor flow in hover, and still the wake was far from adequately resolved. At present, structured overset grid framework is possibly best equipped to capture the rotor wake adequately enough and enable correlation study correlations between rotor-blade shape and tip vortex strength/trajectory. It is becoming quite clear that any forthcoming increases in memory/CPU will be in form of distributed systems rather than monolithic systems. Therefore the wake capturing grid points will have to be broken up with each processor convecting a part of the wake. Hence any non-dissipative high order scheme - within the context of structured grids – will have to be accurate all the way up to the block boundaries. Even if all the current advances in high order methods are properly built in a multi-processor, overset framework and accurate NS computations capturing 1520 revolutions of the tip vortex is accomplished, it may be impractical and unnecessary for design applications in the near future. Such computations are necessary for establishing benchmark computational results and fundamental confidence that first-principles based schemes are indeed capable of resolving the highly unsteady wake for complex rotor-blade shapes. Fullfledged wake capturing methodologies is also essential for interactional problems. Once such an option is 13 American Institute of Aeronautics and Astronautics AIAA-00-0114 available – it is still going to be a costly option in the near future – one can step back and use more approximate methods for specific design problems. Blade-vortex interactional characteristic studies, for instance, require an accurate computation of the first couple of revolutions. However, to accurately predict the position even for the first couple of revolutions it is essential to correctly represent the far-wake with Lagrangean techniques apart from resolving the near wake from first-principles. Hybrid inner-zone (or zones fully capturing the first couple of revolutions) NS and outer-zone Lagrangean solutions such as Berkman and Sankar[78], Moulton and Caradonna[73] with high order accurate NS zones – Hariharan[75], Tang and Baeder[77] - promises to be a useful tool in the near future. For industrial purposes further grid point reduction by using tip vortex tracking overset grids can be employed. As faster CPU becomes affordable, more of the wake can be directly computed and less of it convected using Lagrangean techniques. ACKNOWLEDGMENTS Parts of results presented in this paper were done under NASA SBIR contract NAS2-14226. Dr. Hariharan would also like to thank Dr Z.J. Wang, and Dr A.J. Przekwas of CFD Research for their support, and Dr. Roger Strawn of NASA Ames Research Center for the various discussions, during this effort. The second author was supported by the National Rotorcraft Technology Center (NRTC). REFERENCES 1. 2. 3. 4. 5. Gray, R. B., "On the Motion of the Helical Vortex Shed from a single bladed Hovering Model rotor and its Application to the calculation of the spanwise aerodynamic loading," Princeton University Aero. Engineering Department, Report No. 313, September 1955. Landgrebe, A. J. and Cheney, M. C., "Rotor Wakes - Key to Performance Prediction," AGARD Conference on Aerodynamics of Rotary Wings, AGARD-CPP-111, February 1973. Landgrebe, A. J., "The Wake geometry of a Hovering Helicopter Rotor and its influence on Rotor Performance, " Journal of the American Helicopter Society, Vol. 17, No. 4, October 1972, pp. 3-15. Kocurek, J. D. and Tangler, J. L., "A prescribed Wake Lifting Surface Hover Performance Analysis," Journal of the American Helicopter Society, Vol. 22, No. 1, January 1977, pp. 24-35. Shenoy, K. R. and Gray, R. B., "Iterative Lifting surface method for thick bladed hovering helicopter rotors," Journal of Aircraft, Vol. 18, No. 6, June 1981, pp. 417-424. 6. Scully, M. P., "Computation of Helicopter Rotor Wake geometry and its influence on Rotor Harmonic Airloads," MIT, ASRL-TR-178-1, March 1975. 7. Summa, J. M. " Potential Flow about threedimensional lifting configurations, with applications to wings and rotors," AIAA paper 75125, 1975. 8. Summa, J. M., " Advanced Rotor analysis methods for the aerodynamics of vortex blade interactions in hover, " Vertica, Vol. 9, No. 4, 1985, pp. 331-343. 9. Bliss, D.B. and Miller, W. O., " Efficient free wake calculations using analytical/numerical matching and far-field linearization, " presented at the 45th Annual American Helicopter Society Forum, Boston, MA, May 1989. 10. Johnson, W., "A Comprehensive Analytical Model of Rotorcraft Aerodynamics and Dynamics, " NASA TM-81182, 1982. 11. Caradonna, F. X. and Isom, M. P., "Subsonic and Transonic Potential Flow over Helicopter Rotor Blades, AIAA Journal, No. 12, December 1972, pp. 1606-1612. 12. Chang, I. C., "Transonic Flow Analysis for Rotors, " NASA TP 2375, July 1984. 13. Egolf, T. A. and Sparks, S. P., " A Full Potential Rotor Analysis with Wake Influence using an Inner-Outer Domain Technique, " 42nd Annual AHS Forum, June 1986. 14. Sankar, L. N. and Prichard, D., " Solution of Transonic Flow past rotor blades using the Conservative Full Potential Equation, " AIAA Paper 85-5012, October 1985. 15. Sankar, L. N., Malone, J. B. and Tassa, Y., " A Strongly Implicit Procedure for Steady Threedimensional Transonic Potential Flow, " AIAA Journal, Vol. 20, No. 5, 1982. 16. Strawn, R.C., " Numerical Modelling of Rotor Flows with a Conservative form of the Full Potential Equation, " AIAA Paper 86-0079, July 1986. 17. Bridgeman, J. O., Strawn, R. C. and Caradonna, F. X., " An Entropy and Viscosity Corrected Potential Method for Rotor Performance prediction, " 44th Annual AHS Forum, June 1988. 18. Strawn, R. C. and Caradonna, F. X., "Conservative full potential model for unsteady transonic rotor flows, " AIAA Journal, Vol. 25, February 1987, pp. 193-198. 19. Ramachandran, K., Tung, C. and Caradonna, F. X., "Rotor hover performance prediction using a freewake computational fluid dynamics method, " Journal of Aircraft, Vol. 26, December 1989, pp. 1105-1110. 14 American Institute of Aeronautics and Astronautics AIAA-00-0114 20. Ramachandran, K., Moffitt, R. C., Owen, S. J. and Caradonna, F. X., " Hover Performance Prediction using CFD, " 50th Annual AHS Forum, June 1994. 21. Sankar, L.N., Wake, B.E. and Lekoudis, S.G.," Solution of the Unsteady Euler equations for fixed and rotor wing configurations," Journal of Aircraft, Vol23,No.4, April 1986, pp283-289. 22. Agarwal, R. K. and Deese, J. E., " An Euler solver for calculating the flowfield of a Helicopter Rotor in Hover and Forward Flight, " AIAA 19th Fluid Dynamics, Plasma Dynamics and Laser Conference, June 1987. 23. Hassan, A. A., Tung, C. and Sankar, L. N., " An Assessment of Full Potential and Euler Solutions for Self generated Blade-Vortex Interactions, " 46th Annual AHS Forum, May 1990. 24. Wake, B.E. and Sankar, L.N., "Solution of NavierStokes equations for the flow over a rotor blade ", Journal of the American Helicopter Society, April 1989. 25. Wake, B. E. and Egolf, T. A., " Initial Validation of an Unsteady Euler/Navier-Stokes Solver for Helicopter Rotor Airloads in Forward Flight, " Proceedings of the AHS International Specialists' Meeting on Rotorcraft Basic Research, March 1991. 26. Smith, M. J. and Sankar, L. N., " Evaluation of a Fourth-Order Compact Operator Scheme for EulerNavier-Stokes Simulations of a Rotor in Hover, " AIAA Paper 91-0766, January 1991. 27. Tsung, F. L. and Sankar, L. N., " Numerical Simulation of Flow Separation for Rotors and Fixed Wings, " AIAA Paper 92-0635, January 1992. 28. Narramore, J. C., Sankar, L. N. and Vermeland, R., " An Evaluation of a Navier-Stokes Code for calculations of Retreating Blade Stall on a Helicopter Rotor, " 44th Annual AHS Forum, Washington D. C., January 1988. 29. Chen, C. L., McCroskey, W. J. and Obayashi, S., "Numerical solutions of forward flight rotor flow using an upwind method, " Vol. 28, June 1991, pp. 374-380.Journal of Aircraft, 30. Mello, O. A. F., "An Improved Hybrid NavierStokes/Full Potential Method for Computation of Unsteady Compressible Flows, " Ph. D Thesis, Georgia Institute of Technology, Atlanta, GA, November 1994. 31. Berezin, C. R. and Sankar, L. N., "An Improved Navier-Stokes/Full Potential Coupled Analysis for Rotors, " Mathematical Computational Modelling, Vol. 19, No. 3/4, 1994, pp. 125-133. 32. Moulton, M. A., Hafez, M. M. and Caradonna, F. X., "Zonal procedure for predicting the hovering performance of a helicopter, " ASME Journal, Vol. 184, 1984. 33. Strawn, R.J and Barth, J.T "A finite-volume Euler solver for computing rotary-wing aerodynamics on unstructured meshes", presented at the 48th Annual forum of the American Helicopter Society, Washington D.C, June 1992. 34. Srinivasan, G. R. and McCroskey, W. J., " NavierStokes Calculations of Hovering Rotor Flowfields, " Journal of Aircraft, Vol. 25, No. 10, October 1988, pp. 865-874. 35. Srinivasan, G.R., Baeder, J. D., Obayashi, S. and McCroskey, W. J., "Flowfield of a Lifting Rotor in Hover : A Navier-Stokes Simulation, " AIAA Journal, Vol. 30, No. 10, October 1992. 36. Srinivasan, G.R and Baeder, J.D "TURNS: A free wake Euler/Navier-Stokes numerical method for helicopter rotors", AIAA Journal, Volume 31, Number 5 May 1993. 37. Srinivasan, G.R, Raghavan, V., Duque, E.P.N and McCroskey, W.J "Flowfield analysis of modern helicopter rotors in hover by Navier-Stokes method", presented at the AHS International Technical Specialists meeting on Rotorcraft Acoustics and Rotor Fluid dynamics, Oct 1991, Philadelphia, PA. 38. Duque, E. P. N., " A Numerical Analysis of the British Experimental Rotor Program Blade, " 45th Annual AHS Forum, Boston, MA, May 1989. 39. Duque, E. P. N. and Srinivasan, G. R., " Numerical Simulation of a Hovering Rotor using Embedded Grids, " 48th Annual AHS Forum, Washington D.C., June 1992. 40. Hariharan, N., Sankar, L. N., "Higher Order Numerical Simulation of Rotor Flow Field," AHS Forum and Technology Display, Washington, DC., May 1994. 41. Bangalore, A., "Computational Fluid Dynamic Studies of High Lift Rotor Systems Using Distributed Computing, " Ph. D Thesis, Georgia Institute of Technology, Atlanta, GA, May 1994. 42. Ahmad, J. and Duque, E. P. N., " Helicopter Rotor Blade Computation in Unsteady Flows using Moving Embedded Grids, " AIAA Paper 94-1922, June 1994. 43. Steinhoff, J., Yonghu, W., Mersch, T. and Senge, H., " Computational Vorticity Capturing Application to Helicopter Rotor flow, " AIAA 30th Aerospace Sciences Meeting, Reno, NV, January 1992. 44. Wang, C. M., Bridgeman, J. O., Steinhoff, J. S. and Yonghu, W., "The Application of Computational Vorticity Confinement to Helicopter Rotor and Body flows, " 49th Annual AHS Forum, St. Louis, MO, May 1993. 45. Duque, E. P., " A Structured/Unstructured Embedded Grid solver for Helicopter Rotor Flows, " 50th Annual AHS Forum, June 1994. 15 American Institute of Aeronautics and Astronautics AIAA-00-0114 46. McCroskey, W. J., " Wake Vortex System of Helicopters," AIAA-95-0530, Reno, NV, January 1995. 47. Sheridan, P. F., and Smith, R.P., "Interactional Aerodynamics- A New Challenge to Helicopter Technology", Journal of the AHS, Vol. 25, No. 1, p. 3-21, January 1980. 48. Smith, C.A., Betzina, M.D., "Aerodynamic Loads Induced by a Rotor on a Body of Revolution", Journal of the AHS, Vol. 31, No. 1, January 1986. 49. Brand, A. G., Komerath, N. M., and McMahon, H.M., "Surface Pressure Measurement on a Body Subject to Vortex Wake Interaction", AIAA Journal, Vol. 27, No. 5, May 1989. 50. Liou, S. G., Komerath, N. M. and McMahon, H. M., " Measurement of the Interaction Between a Rotor Tip Vortex and a Cylinder", AIAA Journal, Vol. 28, No. 6, June 1990. 51. Brand, A. G., " An Experimental Investigation of the Interaction between a Model Rotor and Airframe in Forward Flight," PhD Thesis, School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, Georgia, May 1989. 52. Liou, S. G., "Velocity Measurements on a Lifting Rotor/Airframe Configuration in Low Speed Forward Flight," PhD Thesis, School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, Georgia, December 1988. 53. Kim, J., "An Experimental Study of the Interaction Between a Rotor Wake and an Airframe With and Without Flow Separation," PhD Thesis, School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, Georgia, May 1993. 54. Liou, S. G., Komerath, N. M. and McMahon, H. M., " The Velocity Field of a Circular Cylinder in the Wake of a Rotor in Forward Flight", Journal of Aircraft, Vol. 27, No. 9, September 1989. 55. Crouse, G. L., Leishman, J. G., and Bi, N., " Theoretical and Experimental Study of Unsteady Rotor/Body Aerodynamic Interactions," Proceedings of the 46th Annual Forum of the AHS, May 1990. 56. Berry, J. D., and Althoff, S. L., " Inflow Velocity Perturbations Due to Fuselage Effects in the Presence of a Fully Interactive Wake ," AHS Forum and Technology Display, Washington, DC., May 1990. 57. Egolf, T. A., and Landgrebe, A. J., " Helicopter Rotor Wake Geometry and Its Influence in Forward Flight, Volume 1,2-Generalized Wake Geometry and Wake Effect on Rotor Airloads and Performance," NASA CR 3726, October 1983. 58. Clark, D. R., and Maskew, B., "A Re-Examination of the Aerodynamics of Hovering Rotors Including the Presence of the Fuselage," Proceedings of the 47th Annual Forum of the AHS, May 1991. 59. Mavris, D. N., "An Analytical Method for the Prediction of Unsteady Rotor/Airframe Interactions in Forward Flight," PhD Thesis, School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, Georgia, November 1988. 60. Lorber, P. F., and Egolf, T.A., "An Unsteady Helicopter Rotor-Fuselage Aerodynamic Interaction Analysis," Journal of the AHS, Vol. 35, No. 3, July 1990. 61. Quackenbush, T. R., Lam, C-M.G., Bliss, D.B., Katz, A.," Vortex Methods for the Computational Analysis of Rotor-Airframe Interaction,", 48th AHS Annual Forum, Washington D.C., June 1992. 62. Chaffin, M. S., Berry J. D., "Navier-Stokes and Potential Theory Solutions for a Helicopter Fuselage and Comparison With Experiment," ATCOM TR-94-A-013, June, 1994. 63 Zori, L. A. J., Mathur, S. A., Rajagopalan, R. G.," Three-Dimensional Calculations of Rotor-Airframe Interaction in Forward Flight,", 48th AHS Annual Forum, Washington D.C., June 1992. 64. Affes, H., Conlisk , A.T., Kim, J.M., Komerath, N. M., " An Experimental and Analytical Study of the Interaction of a Vortex With an Airframe", AIAA 92-0319, Reno, Nevada, January 1992. 65. McCroskey, W. J., " Some Rotorcraft Applications of Computational Fluid Dynamics," USAAVSCOM Technical Report 88-A-001, March 1988. 66. Meakin, R. L., "Moving Body Overset Grid Methods for Complete Aircraft Tiltrotor Simulations," AIAA-93-3350, July 1993. 67. Hariharan, N., Sankar, L., N., "Numerical Simulation of Rotor-Airframe Interaction", 33rd AIAA Aerospace Sciences Meeting, Reno, NV, January 1995. 68. Duque, E. P. N. and Dimanlig, A. C. B., "NavierStokes Simulation of the AH-66 Comanche Helicopter, " AHS Aeromechanics Specialists Conference, San Francisco, CA, January 1994. 69. Srinivasan, G. R., and Ahmad, J. U., " NavierStokes Simulation of Rotor-Body Flowfield in Hover Using Overset Grids," Paper No. C15, 19th European Rotorcraft Forum, Cernobbio, Italy, September 1993. 70. Hariharan, N., Sankar, L.N., “Application of ENO Schemes to Rotary Wing Problems,” 13th AIAA Applied Aerodynamics Conference, San Diego, CA, June 1995. 71. Srinivasan, G.R., Sankar, L.N., “Status of Euler and Navier-Stokes CFD Methods for Helicopter Applications,” AHS Aeromechanics Specialist Meeting, October 1995. 72. Ahmad J.U., Strawn, R.C., "Hovering Rotor and Wake Calculations with an Overset-Grid Navier- 16 American Institute of Aeronautics and Astronautics AIAA-00-0114 73. 74. 75. 76. 77. 78. 79. 80. 81. Stokes Solver," AHS 55th Annual Forum, May 2527, 1999. Moulton, M.A., Wenren, Y., Caradonna, F.X., "Free-Wake Hover Flow Prediction with a Hybrid Potential/Navier-Stokes Solver, AHS 55th Annual Forum, May 25-27, 1999. Steinhoff et al., “Computation of Thin Features Over Long Distances Using Solitary Waves”, AIAA-97-1976, Snowmass, CO. Hariharan, N. and Sankar, L.N. “ First-Principles Based High Order Methodologies for Rotorcraft Flowfield Studies, “AHS 55th Annual Forum, Montreal, Canada, May 1999. Hall, C.M., Long, L.N., “High-Order Accurate Simulations of Wake and Tip Vortex Flowfields, “ AHS 55th Annual Forum, Montreal, Canada, May 1999. Tang, L., and Baeder, J.D., “ Improved Euler Simulation of Hovering Rotor Tip Vortices with Validation,” AHS 55th Annual Forum, Montreal, Canada, May 1999. Berkmann, M.E., Sankar, L.N., Berezin, C., Torok, M.S., “A Navier-Stokes/Full Potential Free Wake Method for Rotor Flows,” AIAA-97-0112. Landgrebe, A.J., “ New Directions in Rotorcraft Computational Aerodynamics Research in the U.S.,” Proceedings of the AGARD 75th Fluid Dynamics Panel Symposium on Aerodynamics and Aeroacoustics of Rotorcraft, Berlin, Germany, October 1994. Lorber, P. F., Stauter, R. C., and Landgrebe, A. J., “A Comprehensive Hover Test of the Airloads and Airflow of an Extensively Instrumented Model Helicopter Rotor,” Proceedings of 45th Annual Forum of the AHS, MA, May, 1989. Hariharan, N.,”A First-Principles Based High Order Discontinuous Galerkin (DG) Methodology for Rotorcraft Flowfield Studies,” NASA SBIR Phase-I Report NAS2-98062, CFD Research Corporation. 17 American Institute of Aeronautics and Astronautics