Optimal Gabor filter subset using a genetic algorithm
advertisement

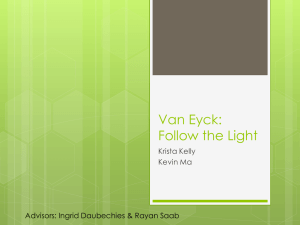
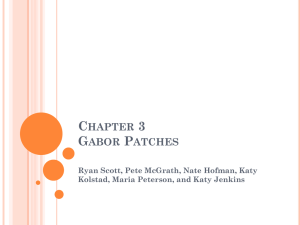
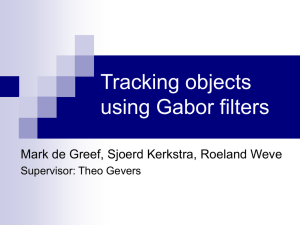
Optimal Gabor filter subset using a genetic algorithm C. Mandriota, N. Ancona, E. Stella, A. Distante Institute of Intelligent Systems for Automation– C.N.R. Via Amendola, 166/5 – 70126 Bari (Italy) Abstract: - This paper investigates an approach for analyzing textured material, as rail surface, using an “optimal subset” of Gabor filters. A hybrid system, that ensemble Genetic Algorithm (GA) and Support Vector Machine (SVM), is used to find optimal subset of Gabor filters. Basically, this problem represents an optimization problem; in fact, we search, within the space of a large pool of Gabor filters, the optimal solution for our classification problem. GA offers an interesting approach to solve the optimization problem. Moreover, SVM classifier offers an efficient support to evaluate the fitness measure, used as feedback by GA. Our aim is to evolve optimal Gabor filter subset and simultaneously to reduce the computational cost for real time implementations. Key Words: - Gabor filters, Texture analysis, 1 Introduction In this paper, a new defect detection algorithm for textured images is presented. The defects, in general, can be characterized as anomalies in the frequency domain of the texture. Moreover, for having the accurate localization of defects is need that the filters used are well localized in the spatial domain. Gabor filters are one of the most successful tool used in texture analysis and achieve optimal joint localization and resolution in spatial and spatial frequency domain, as consequence they are well suitable for defect detection application. 2D Gabor filters have been successfully used in several image analysis and computer vision applications [1,2,3]. Jain and Farroknia in [2] have used a pool of Gabor filters, named Gabor filter bank, for solving texture segmentation task. This approach requires a large set of filters with predetermined Gabor parameters, independent of the textures in the images, to tessel the whole frequency plane. As consequence, we have a high dimensional feature space. Although such approach voids a sampling without overlapping of the frequency domain, it can dramatically affect the computational costs and time. Teuner and Pichler in [4] have used tuned matched Gabor filters for unsupervised texture segmentation task of images, for avoiding the disadvantages of the filter bank approach. The parameters of tuned Gabor filter set are suitable for classification task because are matched closely to textural features that to be detected, and as consequence high dimensionality is reduced but the choice of those parameters can be crucial for the particular task. Defect detection, Genetic Algorithm, SVM. Our aim is both to obtain a more robust and efficient filter selection strategy and to improve simultaneously the efficiency and the detection rate of the final classifier. Filter selection problem is basically an optimization problem. Genetic algorithm offers an interesting approach to Gabor filter selection problem and is based on mechanism of evolution in nature. This paper focus on the Gabor filter subset selection for texture analysis of rail defects through the use of GA in conjunction with a Support Vector Machine. In Section 2, a particular class of rail defect is briefly described. Gabor filters are introduced in Section 3. In Section 4 is considered the hybrid approach for determining optimal Gabor filter subset presenting an overview of GA and SVM. The paper is concluded in Section 5 with experimental results. 2 Rail Defects We address the problem of finding a technique based on texture analysis, that allows to detect a particular class of surface defect on the rail track, in particular on the rail head. This class of defect presents a privilege (as cracking, welding, shelling) or none privilege direction (corrugation, blob, spot). In the following sections we consider only a type of track defect is the so-called rail corrugation that is an undulatory deformation on the head of the rail. Fig. 3 shows rail image of the corrugation extracted from a long strip image of 512x2048 pixels. In high-speed train, the corrugation induces harmful vibrations on wheel and on its components, reducing the lifetime. and are depicted in Fig. 1. Next, for each filtered image is evaluated the feature image as magnitude . 3 Gabor Filters The 2D Gabor functions are complex functions given by the following expression j 1 : h σ , , F 0 x g1 ,2 , (x) exp 2jF0x1' with = (1, 2), where x’ is rotated coordinate of x ( x1' , x2' x1 cos x2 sin ,x1 sin x2 cos ). g1, 2, represents a 2D Gaussian function with standard deviations 1, 2 given by following expression: g 1 , 2 , x F0= f f 0 2 1 0 2 2 1 x 2 x 2 1 exp 12 22 212 2 1 2 Fig. 1: Frequency (B) and half peak radial () bandwidths. (1) f 20 0 f1 and = tg–1 are the frequency and orientation of sinusoidal plane. In the hypothesis that = , that is the modulating Gaussian has the same orientation of the complex sine grating, the Gabor function is always elongated in the direction of the vector f0. The Fourier transform of a 2D Gabor function, as in equation (1), is given by the following expression: H ,,F0 (f1 , f 2 ) 4 2 exp(2 2 (12 (f1' F 0 ) 2 22 (f 2' ) 2 )) (2) where f1' , f 2' f1 cos f 2 sin ,f1 sin f 2 cos .. Note that, the Fourier transform of a 2D Gabor function is a 2D Gaussian function shifted in the frequency plane. For characterizing the spectral proprieties of a Gabor filter, we compute its passing bandwidth that is defined in terms of spatial frequency and orientation bandwidths. Taking in account the definition of octave, the frequency and orientation half-peak bandwidths of the “daisy petal” Gabor filter are given by following expressions: B octave log 2 2 1F 0 2 ln 2 2 1F 0 2 ln 2 2tg 1 (3) 2 ln 2 2 2 F 0 (4) 4 Determining Optimal Gabor Filter Subset In this section is defined the hybrid approach used to compute an optimal subset of Gabor filters to detect rail defects. As previous said, sampling of the frequency domain, with Gabor filter bank approach, is achieved with a tessellation of the whole frequency plane, consequently is computationally prohibitive exhaustively trying all the subsets for finding an “optimal” subset of Gabor filters. By other hand, tuned/matched Gabor filters approach is dependent on choice of Gabor parameters for that particular texture to be detected. Our aim is both to obtain a more robust and efficient filter selection strategy, having as few filters as possible, and to improve simultaneously the efficiency and the detection rate of the final classifier. Note that, filter selection problem is basically an optimization problem and Genetic Algorithm offers an interesting approach to search the space of possible subsets of a large pool of candidate Gabor filters. Moreover, the classification performance of SVM, an unknown data, together with filtering cost are used as measure of fitness that is used as feedback by GA to evolve optimal Gabor filter subsets. This assembled system iterates until filter subset is found with a satisfactory performance and a significant reduced number of Gabor filters. The Fig. 2 shows the hybrid system. Genetic Algorithm Fitness individual Sto crite Fig. 2: Hybrid system using Genetic Algorithm and Support Vector Machine. Fig. 3: Rail image of corrugation for extracting the patch examples. 4.1 Genetic Algorithm In this section, we present a brief introduction about genetic algorithm, initially introduced by Holland in [5]. More details can be found in [6]. Genetic algorithms are inspired by mechanisms of evolution in nature. An initial population of potential solutions that correspond to elements of high dimensional search space is created. Individuals in the population, represented by chromosomes, are character strings that are analogous to the chromosomes that we observe in our own DNA. Each individual represents a candidate solution to the optimization problem being solved. If we are solving a target problem, we are looking for some solution that would be the best among others. Solutions from one population are taken and used to form a new population. This is motivated by a hope, that the new population would be better than the old population. Commonly, the initial population is randomly generated as collection of individuals representing samples of the high dimension space to be searched. Each individual, named chromosome is represented as a binary string with a fixed length l, where l corresponds to dimension of the search space. Each bit, in the binary string, represents the absence or inclusion of the associated feature [7]. For example, for a binary individual X, Xi=0 represents elimination of the i-th feature, while Xi=1 represents inclusion of the same feature. GA maintains a constant number of individuals in the population and these are in competition for resources in the environment. The “goodness” of an individual is typically defined using a simple function measure named fitness function. This function indicates how well particular combinations of genes in the chromosome solve the optimization problem. Those chromosomes, which represent a better solution to the target problem, have more chances to be reproduced than those chromosomes that are poorer solutions. GAs use a form of fitness-dependent probabilistic selection of individuals from the current population to form the next generation. New individuals (offspring) are reproduced for the next generation using two main genetic operators: crossover and mutation. Mutation operates on a single string and generally changes a bit random while crossover operates on two parent strings to produce two offspring. Consequently, a string 11010 changes to 11110 as consequence of random mutation. This operator perturbs the individuals of the population introducing new information into itself. Moreover, mutation operator does not allow any form of stagnation. Considering the two strings 01101 and 11000, setting a crossover position 4, the result of application the crossover operator are the offspring 01100 and 11001. An iteration of the GA cycle depicted in Fig. 4 is referred to as a generation. Replacement Selection Gen For our aims, each member of the current GA population represents a competing Gabor filters subset that must be evaluated to provide fitness feedback to the evolutionary process. This is achieved by invoking SVM with the particular specified Gabor filters subset and a set of training data. With a set of unseen data is evaluated the classification accuracy. Accuracy together with the filtering cost is used as GA fitness. The accuracy of the classification phase is estimated by calculating the percentage of patterns in the test set that are correctly classified by SVM classifier in question [8]. The fitness function is defined as follows: cos t ( X ) fitness( X ) accuracy( X ) accuracy( X ) 1 (5) 4.2 Support Vector Machine In this section, we present a brief introduction about Support Vector Machine (SVM), introduced by V.Vapnik [8]. SVM is based on structural risk minimization principle from computational learning theory, or better, on minimization of the misclassification probability of unseen patterns with an unknown probability distribution of data. SVMs are simple hyperplanes that separate the data maximizing the distance between the hyperplane and the closest points of the training set. Considering the problem of separating the set of training vectors belonging to the separate classes S = x1, x2, …, xN, where xi RN with i=1, 2, …, N, are given also their labels y1, y2, …, yN with yi -1, 1. There are many possible classifiers that can separate the data with hyperplane w x +b = 0, but there is only one that maximizes the distance between the closest vectors to hyperplane and hyperplane itself. SVM finds the optimal separating hyperplane: w* x +b* = 0 maximizing the margin and minimizing the number of misclassified patterns. The optimal weight vector w* RN is expressed as linear combination of the examples: N w * *i y i x i i 1 where the optimum * *1 , *2 , , *N is a solution of a quadratic programming problem. The points xi with i >0 are called support vectors. The classification of a new data x involves the evaluation of the decision function: y = sign( f(x) ) where f(x) = w* x +b* or in equivalent way: * N f (x) *i x i x b * i 1 Then the class y -1, 1 of x is expressed evaluating the dot product between the data and some elements (support vectors) of the training set S. The same construction can be extended to the case of non-linear separating surfaces, where each point x in the input space is mapped to a point of a higher dimensional space, named feature space, and looking for the optimal separating hyperplane in this new space. Let (x) be the mapped point x in the feature space, the mapping () is subject to the condition that the dot product of two points in the feature space (x) (y) can be rewritten as kernel function K(x ,y). Then the optimal separating hyperplane in the feature space can be written as a non-linear separating surface in the input space: N f (x) *i K (x i , x) b * i 1 represented as linear combination of kernel functions centred on the support vectors only [9]. Because f(x) does not depend on the dimensionality of the feature space, SVM classifier represents an attractive choice for experimenting with GA for selecting optimal Gabor filter subset. 5 Implementation Details Our experiments were run employing a genetic algorithm [10] using a stochastic universal sampling (SUS) proposed by Baker in [11]. This selection method avoids that each member of current generation could be chosen more times or fewer times than expected number. Moreover, it selects the population according to some given probability in a way that minimize chance fluctuations. The individuals are mapped to contiguous arcs of a roulette wheel, such that each individual’s arc is equal in size to its fitness. Equally spaced pointers are placed over the wheel, as many as there are individuals to be selected (see Fig. 5). Consider N the number of selections required, then the distance between the pointers are 1/N, and the position of the first pointer is given by a randomly generated number in the range [0, 1/N]. Individuals whose positions span the positions of the pointers are selected. The training set consists of 710 (355 positive examples without defect and 355 negative examples with corrugation defect) patch examples extracted by rail images as in Fig. 3. Each patch example is been extracted randomly with a fixed size of 32x32 pixels. While the validation set consists of 836 patch examples (400 positive examples and 436 negative examples) with the same fixed size of 32x32 pixels. The goal of this set of experiments is to find the optimal Gabor filter subset capable of being used to correctly classify with a low computational cost based on number of Gabor filter used. In our experiments, the relevant parameters are: population size = 20, crossover rate = 0.6, mutation rate = 0.0001. Let n the total number of Gabor filters (or equivalently, let n the fixed length of each individual), then exist 2n possible Gabor filter subset. A binary vector of dimension n represents each individual, if i-th bit is set to 1, it means that the corresponding i-th Gabor filter is selected. While a value of 0 indicates that the corresponding i-th Gabor filter is not selected. The fitness of each individual is determined in accord to (5). Considering B=1 octave, four radial frequencies ( 2 4, 2 8, 2 16 , 2 32 ), angular resolution =22.5, we have 32 different Gabor filters, then 232 possible Gabor filter subsets as candidates to solve our optimisation problem. Fig. 6 shows daisy petal configuration of our 2D Gabor filter bank. The ellipses show the passing bandwidth with 1 =1.59, 3.18and 2 =2.66, 5.33. Note that, for the central symmetry in the frequency plane of Gabor filters, there is no need to cover the entire frequency plane but only half of it is needed. As consequence, we have considered only eight values of orientation . The results reported in Table 1 are based on 10 independents runs of the GA. When the entire set of Gabor filters is used (i.e. each ellipses in the daisy petal configuration is active), the accuracy of the classifier is equal to 96%. Also, table 1 shows several accuracies of SVM for some Gabor filter subsets, where for each chromosome is indicated the corresponding number of Gabor filter used. Note that, the appropriate selection of Gabor filters permits to eliminate redundant or irrelevant properties that are not necessary to improve classification performance and to reduce the execution time. In particular, to verify the efficiency of the whole system, we have obtained accuracy equals to 98% on the test set, with 615 patch negative examples and 554 patch positive examples, using Gabor filter subset with eight filters (see figure relating to Table 1 for particular daisy petal configuration), that means a good generalization on test set. In conclusion, the method presented here can be used for automated real-time flaw detection, when the computational time for classification phase needs to be low as possible. Moreover, it is important to note that our method requires only a small number of Gabor filters instead of the entire Gabor filter bank. pntr 1 randomly pntr 4 1 6 2 3 5 4 Fig. 6: Daisy petal configuration of a 2D Gabor filter bank. Chromosome Accuracy N.ro of Gabor filters 11111111111111111111111111111111 96% 10100001000101010001010110000000 10100000001011100010000110000000 11010001000101000000000110000000 10010000011010000000000000010001 98.9% 98.92% 98.2% 96.4% 32 10 9 8 7 Table 1: Experimental results References: [1] A.C. Bovik, M. Clark, and W.S. Geisler, “Multichannel texture analysis Using Localized Spatial Filters”, IEEE Trans. On PAMI, vol. 12, pp.55-73, 1990. [2] A.K. Jain, and F. Farrokhnia, “Unsupervised texture segmentation using Gabor filters”, Pattern Recognition, 24,pp.1167-1186, 1990. [3] D.F. Dunn, and W.E. Higgins, “Optimal Gabor Filters for Texture Segmentation”, IEEE Trans. Image Processing, vol. 4, pp. 947-964, July 1995. [4] A. Teuner, O. Pichler, B.J. Hosticka, “Unsupervised texture segmentation using Gabor filters“, IEEE Trans. Image Process, 4 (16), pp. 863-870,1995. [5] J.H. Holland, Adaptation in Natural Artificial Systems, University of Michigan Press, Ann Arbor, MI., 1975. [6] M. Mitchell, An Introduction to genetic algorithm, MIT PRESS, Cambridge – MA, 1996. [7] H. Vafaie and K. De Jong, “Improving the Performance of a Rule Induction System Using Genetic Algorithms”, Proceedings of the First International Workshop on Multistrategy Learning, Harpere Ferry, W.Virginia, USA, 1991 [8] V. Vapnik, The Nature of Statistical Learning Theory, Springer Verlag, 1995. [9] N. Ancona, ”Costruzione di Support Vector Machines e risultati sperimentali”. Technical Report RI-IESI/CNR - Nr. 07/98, ISSIA, C.N.R., Bari, Italy, 1998. [10] D. Goldberg, Genetic Algorithms in Search, Optimisation, and Machine Learning. AddisonWesley, New York. [11] J.E. Baker, “Reducing bias and inefficiency in the selection algorithm”, In Proc. of the Second Intern. Conf. On Genetic Algorithm, 1987.