Fill the parentheses in the following procedures for drawing Root
advertisement

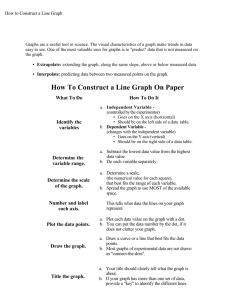
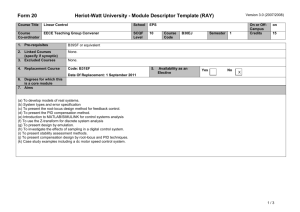
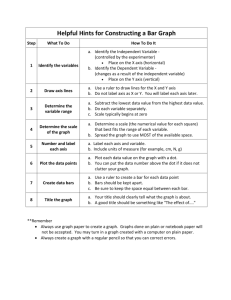
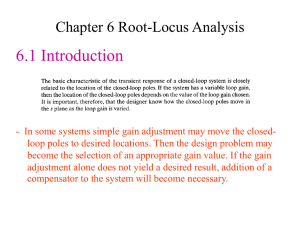
2006’ Automatic Control Class Final Examination 학번: 성명: 점수 Problem 1 Sketch the root loci for the system shown in Figure 1. Figure 1. Solution A root locus exists on the real axis between points s=-1 and s=-3.6. The asymptotes can be determined as follows: 180 2k 1 90 ,90 Angles of asymptotes = 3 1 The intersection of the asymptotes and the real axis is found from a ( 0 0 3.6 1 1 .3 ) 3 1 Since the characteristic equation is s 3 3.6s 2 K s 1 0 We have s 3 3.6s 2 K s 1 The breakaway and break-in points are found from dK ds 3s 2 7.2s s 1 s 3 3.6s 2 0 s 12 from which we get s 0,1.65 j 0.9367 Point s=0 corresponds to the actual breakaway point. But points s=-1.65±j0.9367 are neither breakaway nor break-in points, because the corresponding gain values K become complex quantities. To check the points where root-locus branches may cross the imaginary axis, substitute s=j into the characteristic equation. 1 2006’ Automatic Control Class Final Examination 학번: 성명: K 3.6 2 j K 2 0 점수 Note that this equation can be satisfies only if =(0), K=0. Because of presence of a double pole at the origin, the root locus is tangent to the j axis at =0. The root-locus branches do not cross the j axis. Now draw the root-locus plot. Problem 2 Sketch the root loci for the system shown in Figure 2, following the similar procedure in Problem 1. Figure 2. Solution 2 2006’ Automatic Control Class Final Examination 학번: 성명: 점수 Problem 3 A control system with G s H s 1 K s s 1 2 is unstable for all positive values of gain K. Plot the root loci of the system. By using this plot, show that this system can be stabilized by adding a zero on the negative real axis or by modifying G(s) to G1(s), where G s K s a s 2 s 1 (0 a 1) Solution A root-locus plot for the system with G s H s 1 K s s 1 2 is shown in Figure 3. Since two branches lie in the right half-plane, the system is unstable for any values of K>0. Addition of a zero to the transfer function G(s) bends the right half-plane branches to the left and brings all root-locus branches to the left half-plane, as shown in the root-locus plot in Figure 4. G s K s a s 2 s 1 H s 1 (0 a 1) is stable for all K>0. Figure 3. 3 Thus the system with 2006’ Automatic Control Class Final Examination 학번: 성명: 점수 Figure 4. Problem 4 Draw the Bode Diagram of the following transfer function: G j e jL 1 jT where L=0.5 and T=1. Solution The log magnitude is 20 log G j 0 20 log 1 1 jT The phase angle of G(j) is G j e jL 1 L tan 1 T 1 jT The log magnitude and phase-angle curves for this transfer function with L=0.5 and T=1 are shown in the figure below: 4 2006’ Automatic Control Class Final Examination 학번: 성명: 점수 Problem 5 Draw the Bode diagram of the following nonminimum-phase system: C s 1 Ts Rs Obtain the unit-ramp response of the system and plot c(t) versus t. Solution The Bode diagram of the system is shown in Figure 5. Figure 5. 5 2006’ Automatic Control Class Final Examination 학번: 성명: 점수 For a unit ramp input, C s 1 Ts 1 T 2 s s2 s The inverse Laplace transform of C(s) gives ct t T fo r t 0 Figure 6 shows the response curve c(t) versus t. Figure 6. 6