Estimating through Monte Carlo Methods in n-dimensions
Brian Reece
Iowa State University
MSM Creative Component
June 30, 2006
Heather Thompson, Co-Major Professor
Irvin R. Hentzel, Co-Major Professor
Alejandro Andreotti, Committee Member
1
Introduction
The number has intrigued mathematicians for more than 4000 years. In the
pursuit of , mathematicians have used geometry, trigonometry, algebra, calculus and
probability. This interaction between different branches of mathematics is one of things
that makes interesting to study. This paper begins by looking at different ways of
calculating that have been used throughout history. Next, it looks at the Monte Carlo
method and its applications. Next, a method of estimating with Monte Carlo methods
in n-dimensional space is presented. The paper ends with a discussion of how the topics
can be incorporated into the classroom.
The number has not always had a name. It wasn’t until 1706, when William
Jones wrote 3.14159 , that the world had a symbol for the ratio of a circle’s
circumference to its diameter. Euler adopted the symbol in 1737 and it became the
standard symbol.
The ratio of a circle’s circumference to its diameter has long been understood as a
constant.
Then he made the molten sea; it was round, ten cubits from brim to brim,
and five cubits high, and a line of thirty cubits measure its circumference
(I Kings 7:23)
This passage from the Bible places that constant at
30
3 . This estimate was most
10
likely achieved through measurement, so it is quite reasonable given the likely precision
of measurement. An Egyptian document called the Rhind papyrus, which dates to 1650
2
8
B.C., gives a value of 4 , or 3.1605. It was written by a scribe named Ahmes, who
9
2
copied it from a document that is 200 years older. Some even believe that the Rhind
papyrus can trace its origin back to 3400 B.C.
Sets of numbers
To understand what makes special, one should look at where it fits into the
realm of all numbers. The number is a transcendental number. The transcendental
numbers are so called because they transcend the algebraic numbers.
Algebraic numbers are roots of a polynomial equation of the
form a0 X n a1 X n 1 a2 X n 2 ... an 1 X an 0 , where ai are integers.
For example, 2 , an irrational number, is a solution to the quadratic
equation x 2 2 0 . Algebraic numbers also include complex numbers. Using the
simplest example, i is a solution of the polynomial equation x 2 1 0 .
Transcendental numbers are not the root of any integer polynomial equation. In
1844, Joseph Liouville proved that transcendental numbers exist by finding examples.
Here is an example of one such number, called Liouville’s constant in honor of its
discoverer:
1
10
n 1
n!
1
1
1
2! 3! ... 0.110001000000000000000001000...
1!
10 10
10
This number contains 0’s in every place except for the n! decimal places. So the 1st, 2nd,
6th, 24th, … decimal places contain 1’s. The next 1 will occur in the 5! = 120th decimal
place. In 1850, Liouville proved that this number cannot be a solution of a polynomial
equation with integer coefficients and thus is a transcendental number.
3
The number e was proven to be transcendental in 1873 by Charles Hermite.
Ferdinand Lindemann used Hermite’s results to prove that was transcendental in 1882.
This proof by Lindemann also had a powerful byproduct. Since is transcendental, it
follows that cannot be the solution to a polynomial equation with integer coefficients;
therefore, one of the earliest math mysteries was proven an impossibility.
Since antiquity, mathematicians had tried to construct a square of area equal to the
area of a given circle using only a straightedge and compass. Lindemann’s discovery that
is not the root of any polynomial equation proves this exercise impossible. In order to
do this, one must construct , which is only a possibility if is an algebraic number.
With Lindemann proving that is a transcendental number, he showed that the problem
of squaring a circle was unsolvable in Euclidean geometry.
Archimedes’ Method of Trapping
Archimedes was the first to develop a formal approximation of . He constructed
two series of polygons, one that inscribed a given circle and one that superscribed the
given circle. Using these polygons he created an interval for .
Archimedes first showed that the area of a regular polygon
1
is apothem perimeter . An n-gon would have exactly n congruent triangles drawn from
2
the circumcenter of the polygon to each vertex. Figure 1 shows the first three regular ngons divided into n congruent triangles.
4
Figure 1: Regular n-gons divided into n congruent triangles.
1
The area of a triangle is, of course bh . When this formula is applied to one of
2
the congruent triangles, the area of the triangle is AT
1
sa , where s is a side length and
2
a is the apothem. The apothem is the perpendicular distance from the center to one side
of the polygon. The area of the entire n-gon can be found then by multiplying this area
by n , resulting in
1
An gon n sa .
2
The perimeter of a regular n-gon is just ns , so substituting results in
An gon
1
ap .
2
Figure 2 helps illustrate that as n , a R and p C , and therefore
Acircle
1
RC .
2
This result was Archimedes’ formula for the area of a circle.
5
R
R
R
a
a
a
…
Figure 2: Regular triangle, square and 30-gon with apothem and radius of the
circumscribed circle marked.
From Euclid, Archimedes knew that the ratio of a circle’s area to the square of its
diameter was a constant. Let k be that constant. Then
k
Area
.
d2
Substituting the previous result for the area of a circle, one gets
1
RC
C
2
,
k
2
4d
d
which results in
C
4k (Linn and Neal, March 2006).
d
This constant 4k is of course now known as .
Consider the unit circle. The diameter would be 2 and
1
C . Using
2
construction, one can inscribe a regular polygon of 3 2n sides, with semiperimeter an ,
and superscribe a regular polygon of 3 2n sides, with semiperimeter bn . By constructing
these regular polygons, one obtains an increasing sequence a1 , a2 , a3 ,... and a decreasing
6
sequence b1 , b2 , b3 ,... such that as n , an and bn . This traps between
two numbers, an bn .
Starting with n 1 , one has a regular polygon with 6 sides, or a hexagon.
Choosing a point A on the circle and copying the radius, one can find two more points of
the inscribed hexagon by drawing an arc centered at A. Figure 3 shows the results of this
construction, points B and D. Repeating this process with each resulting point as a center
for the arc results in the inscribed hexagon.
B
R
A
C
D
Figure 3: Construction of vertices of inscribed hexagon.
To get the superscribed hexagon, a line is constructed perpendicular to the radius
at each of the vertices of the inscribed hexagon. Where the perpendicular lines intersect
are the vertices of the superscribed hexagon. Figure 4 illustrates the construction of one
such vertex. Point H is a vertex of the superscribed hexagon.
E
B
H
R
F
A
C
G
D
Figure 4: Construction of a vertex of the superscribed hexagon.
7
Figure 5 shows the circle with the inscribed and superscribed hexagons.
Figure 5: Archimedes’s first attempt at trapping .
A side length in the inscribed hexagon would be 1. So the perimeter is 6, and a1 3 .
Figure 6 shows the length of one half-side of the inscribed hexagon expressed in terms of
a trigonometric ratio. Figure 7 shows a similar result for the superscribed hexagon.
s
2
=cos 60 °
60 °
R=1
Figure 6: Inscribed regular hexagon with radius and half-side length represented.
8
R=1
60 °
s
2
=cot 60 °
Figure 7: Superscribed regular hexagon with radius and half-side length represented.
If n is increased to 2, a dodecagon must be constructed. First, one has to draw a
ray from the center, O, to a vertex of the superscribed hexagon. The point of intersection
between this ray and the circle is a point on the inscribed dodecagon. Drawing 6 of these
rays results in 6 new points, or 12 in total. These 12 points are the vertices of the
inscribed dodecagon. Figure 8 illustrates the construction of one of these vertices.
Figure 8: Construction of a new vertex of the inscribed regular dodecagon.
Figure 9 illustrates the construction of a vertex of the superscribed dodecagon.
First the midpoint of HC and the midpoint of GC are constructed. Then two rays are
drawn from the center of the circle, O, through points B and D. The point of intersection
of OB and
O is point A and the intersection of OD and
O is point E. Next a line
9
perpendicular to OA is constructed through point A; the same is done for OE through
point E. The intersection of these two lines is point I, a vertex on the superscribed
dodecagon.
F
I
E
C
A
D
G
B
H
Figure 9: Construction of a vertex on the superscribed regular dodecagon.
This process can be repeated from each 3 2n -gon to gain vertices of the 3 2 n1 gons.
In general terms an and bn can be expressed as
1 3 2n 2 180
an 3 2n cos
2
3 2n
1 3 2n 2 180
bn 3 2 cot
2
3 2n
n
Using these expressions for an and bn , the first five terms of each sequence can be
found.
an 3,3.105,3.1326,3.139,3.14103,...
bn 3.464,3.2154,3.1597,3.14609,3.1427,...
What makes Archimedes’ work incredible is that he did not have the use of
trigonometry or algebra to develop his interval for . These had not been developed
before his lifetime. Beginning with a hexagon and increasing the number of sides by a
10
factor of two, Archimedes used a 96-gon, when n=5, to obtain this
interval:
223
22
.
71
7
For many years Archimedes’s method remained the only formal method
for calculating . The next section looks at mathematicians’ attempts to calculate
using infinite series.
Gregory’s Infinite Series
James Gregory (1638-1675) and Gottfried Leibniz (1646-1716) both
independently developed an infinite series to calculate . They used the Taylor series
expansion of arctangent to find an infinite series that equals
. The Taylor series
4
x3 x5 x 7
polynomial for arctangent is tan x x ... . Choosing x 1 , one has
3 5 7
1
4
1
n 1
n 1
1
.
2n 1
Proof That the Series Converges
The alternating series test, or the Leibniz criterion, states that for an alternating
series of the form (1) n an if the sequence an , an an1 is monotone decreasing, and
n 1
lim an 0 , then the series
n
therefore, the series
(1)
n 1
1
n 1
n 1
n
an converges. Here an
1
1
0 ; and
; lim
2n 1 n 2n 1
1
converges. In particular, it converges to .
4
2n 1
11
Table 1 shows the partial sums for the first n terms of the Gregory/Leibniz series
multiplied by 4.
n
4 Sn
100
3.1(315929035585537)
1000
3.14(0592653839794)
1,000,000
3.14159(16535897743)
1,000,000,000
3.1415926(2525880504)
2,000,000,000
3.14159265(8505181)
Table 1
As one can see, the series does converge to
, but it does so rather slowly.
4
More Gregory/Leibniz, John Machin and Machin-Like Formulae
In 1706 John Machin improved upon the Gregory/Leibniz series by finding a
series with an increased rate of convergence. The formula that Machin developed was
1
1
4 arctan arctan
.
4
5
239
Machin combined his formula with the Taylor series expansion of arctangent to
calculate (Jovanovic, 2005).
12
4
(1)k
(1)k
2 k 1
2 k 1
k 0 (2k 1) 5
k 0 (2k 1) 239
4
Table 2 shows that this series converges much quicker than the Gregory/Leibniz
series. By term 11, the limits of the Java primitive data types have been reached. There
are two ways of representing decimals in Java. The two data types are called floating
point data types, which in Java, are float and double. Data of type float can take
values from [ 3.4 1038 , 3.4 1038 ], resulting in approximately seven digits of accuracy.
Variables of type double can assume values [ 1.7 10308 , 1.7 10308 ], resulting in
approximately 17 digits of accuracy. Therefore, the best one could hope to do with Java
is 17 digits. However, with rounding error the optimal number of decimal places is
actually 16.
n
4 Sn
2
3.14(05970293260603)
4
3.14159(1772184773)
10
3.14159265358979(22)
11
3.14159265358979(4)
Table 2
The current record for the most digits of , 1,241,100,000,000, was obtained in
2002 by Yasumasa Kanada of Tokyo University. Kanada used a 64-node Hitachi
supercomputer with 1 terabyte of main memory to evaluate a Machin-like formula.
4
12 arctan
1
1
1
1
32 arctan 5arctan
12 arctan
49
57
239
110443
13
The previous three methods all dealt with calculating . While one may use the
previous methods to calculate , one may also use simulations to estimate . In the
following section discussion proceeds as to how and why simulations can be used to
estimate .
Monte Carlo Method
A Monte Carlo method can be described as a method that solves a problem by
generating suitable random numbers and noting that proportion of the numbers obeying
some property. Named after the city in Monaco known for its casinos, the method was
dubbed Monte Carlo method by Nick Metropolis. Credit for the invention of the method
generally goes to Stanislaw Ulam, but there is evidence of its use before the 1940s when
it was formalized.
Ulam, inspired by the recent development of the second electronic computer (the
ENIAC), suggested to John von Neumann that statistical sampling could be used with
more efficiency to solve problems. In particular, von Neumann outlined a statistical
approach to solve the problem of neutron diffusion in fissionable material.
The most common application of the Monte Carlo method is Monte Carlo
integration. Consider the following integral.
1 1
1
0 0
0
... f (u1 ,u2 ,..., un ) du1du2 ...dun
(0,1)
f (u )du
n
14
This integral represents a non-random problem, but suppose there is a random
vector U, which is uniformly distributed over the region of integration. Applying the
function to U, random variable f (U ) is obtained and the expected value of f (U )
is f (U )
(0,1)
f (u) (u)du , where (u ) is the probability density function of U. Being a
n
pdf, (u ) will equal 1 over the region of integration and, therefore, we
have f (U )
(0,1)
f (u )du . Using substitution, f (U ) (Monte Carlo Method).
n
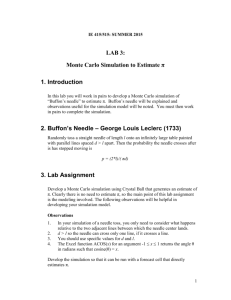
As an example, one can use Monte Carlo integration to find the area under the
curve f ( x) x3 on the interval 1,3 . This is a problem that can be solved with analytical
methods and then can be compared to the results when Monte Carlo integration is applied
to approximate the area.
The area of the bounded region is given by
3
1
3
1
x dx x 4 =20.
4 1
3
For Monte Carlo integration, we will determine the maximum value of the
function on the interval 1,3 . This will correspond to the height of the rectangle. The
width of the rectangle will be 2, the width of the interval over which we are integrating.
Figure 10 shows the rectangle from which random points will be selected. The number
of points that fall under the curve will be counted.
15
Figure 10: Example of Monte Carlo integration.
Monte Carlo integration suggests that
3
1
x3dx P A ,
where P is the proportion of points found below the curve and A is the area of the
rectangular region. Using Monte Carlo integration with 10,000 points, the area is 19.845.
Of course, the true usefulness of Monte Carlo integration comes in integrating a
continuous function that is not integrable by analytical means. For example, the normal
1 x
1
curve is given by the function, g ( x)
e 2
2
2
. Consider the standard normal
curve, when 0 and 1 . This function cannot be integrated. The following
demonstrates the use of Monte Carlo integration to estimate
1
0
1 12 x2
.
e
2
The maximum of g(x) occurs at g(0) .3989. Figure 11 illustrates the integrable
region bounded by a 1 X 1 square.
16
Figure 11: Standard normal curve. The square represents the space from which random
points are chosen for Monte Carlo integration.
Using 10,000 points generated inside the square,
1
0
1 12 x2
e dx .336.
2
The empirical rule states that approximately 68% of the area in a normal curve
falls within one standard deviation of the mean. With symmetry this means that
approximately 34% of the area is between the mean and one standard deviation above the
mean. The Monte Carlo method performed very well in both of our examples.
There are two ways to use the Monte Carlo method. One way applies the Monte
Carlo method to solve a problem that is deterministic. This was illustrated by the
previous two examples of Monte Carlo integration. The second takes advantage of the
law of large numbers. Suppose there is an event, A , for which one wishes to determine
the probability. Let ( A) be the theoretical probability that event occurs. The empirical
17
probability of event A, P( A) , can be found by designing a controlled experiment that will
reduce or eliminate bias. Suppose that n trials of the experiment are performed. The law
of large numbers implies that as n , P( A) ( A) .
One possible source of bias in Monte Carlo methods relates to the random number
generator that is used. Numbers used in Monte Carlo methods are not truly random but
are pseudorandom. This means that they use an algorithm of some sort to generate the
random numbers. A random number generator usually needs a seed value to create a
pseudorandom number. The random number generator in Java uses the clock for the seed
value.
The following example is presented to illustrate how Monte Carlo methods can be
used to estimate .
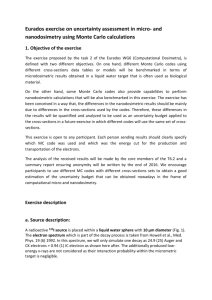
Buffon’s Needle
In 1733, French naturalist Comte de Georges Buffon posed this question:
Suppose a floor is made of parallel strips of wood, each the same width,
and a needle is dropped onto the floor. What is the probability that the
needle will lie across a line between two strips?
Buffon presented a solution in 1777. The following is a treatment of the
mathematics involved in that solution.
18
There are two random variables, the angle at which the needle falls ( 0, )
d
and the distance from the midpoint of the needle to the closest line ( s 0, ). The
2
needle crosses one of the lines if and only if s < sin .
2
Figure 12: Illustration of Buffon’s Needle.
Assuming that and s are independent and uniformly distributed; their joint
distribution would also be uniformly distributed. Let f ( x) be the probability function for
the random variable and g ( x ) be the probability function for s. Then, f ( x)
and g ( x)
1
2
1 2
. Their joint probability function is f ( x ) g ( x )
. Let C be the
d d
d
2
event that the needle crosses one of the parallel lines, then P(C) can be found by
integrating this joint probability function.
P(C )
0
2
0
sin
2
dsd
d
19
2
2
sin
sin
2
1dsd
s 02 d
0 d
0 d 0
2
sin d
0
d 2
sin d
d 0
cos 0
d
2
d
Letting x
d
, the probability function P ( x )
2
x is obtained.
Three possibilities exist for this problem:
Case 1:
d (the simplest case)
In this case the ratio
Case 2:
Here,
d
d
1 ; therefore P(x) =
2
.63662.
d
1 , which means that P(x) <
2
, and as
0 or as d , then P( x) 0 . The
probabilities follow the straight line relationship given above by P ( x ) .
Case 3:
d
20
This is the most difficult probability to calculate. But in general terms, since
implies P(x)>
2
. And it follows that as
d
d
1 , this
, P ( x) 1 . However after graphing P ( x ) ,
two problems become apparent.
P ( x) 1 at x
2
and P ( x) 1 when x
2
. Both of these statements are not
true. Regardless of the distance between the lines and the length of the needle, is
still a possible outcome of the random variable . This means that the needle would lie
parallel to the two parallel lines, which does not result in a cross.
Also, in order for P ( x ) to be a valid probability function, the following inequality
must be satisfied: 0 P( x) 1 . Therefore, a different rule for P ( x ) must be found,
when x 1 .
Define y sin . When y d , the needle will cross one of the parallel lines.
Figure 13 shows the feasible region bounded by the rectangle of width and height d .
The favorable region, when the needle crosses one of the lines, is shaded. Finding the
area of this shaded region will reveal the probability of a cross.
21
y sin
Figure 13: The feasible region bounded by the rectangle of width and height d .
The shaded region can be separated into three regions, two congruent parts and a
rectangle. Figure 14 shows the rectangle in black surrounded on the left and right by the
two congruent regions. The height of the rectangle is obviously d . The width of the
rectangle is the difference between the x-coordinates of the intersection of y sin
and y d . This width can be found by subtracting the combined width of the congruent
d
regions from the width of the feasible region or 2sin 1 .
22
y sin
Figure 14: The area below the curve y sin bounded by the horizontal lines y d
and y 0 is separated into three regions, the rectangle in black surrounded on the left
and right by two congruent regions.
The area of the two congruent regions can be found by finding the area of the first
region and doubling it. The area of the first region is found by integrating the curve
d
y sin from 0 to sin 1 . Thus the area of the favorable region is
d
sin 1
0
d
sin d d 2sin 1
2
d
sin 1
2 cos 0
d
d 2sin 1
d
d
2 cos sin 1 1 d 2sin 1
23
2
d
d
2 1 1 d 2sin 1
.
The area of the total feasible region is d .
Substituting x
d
, one gets
2
1
1
2 1 1 d 2sin 1
x
x
P( x)
d
2
1
2 1 1
x d 2 csc1 x
d
d
2
x2 1 1
x 1
2 csc1 x
2
x
2
x 1
x
2
x
2
x2 1 1
1
2 csc x
x
x2 1 1
2
csc 1 x
2 2 csc
x2 1
x
2
x 2 1 sec 1 x
1
x
.
Combining this result with the previous expression for P ( x ) when x 1 yields a piecewise function. The function is graphed in Figure 15(Weisstein, Buffon’s Needle Problem
and Kunkel, September, 4 2003).
24
Figure 15: Probability function for Buffon’s needle, where n is the ratio of needle length
to distance between lines.
Monte Carlo simulation and this probability function can be utilized to obtain an
estimate of . Of course, this is not a terribly efficient means of finding , especially if
one is actually dropping needles. To ensure independence of each trial one would have to
remove the dropped needle before dropping the next needle. There are many Java applets
online which allow one to simulate the needle dropping with a great deal more efficiency.
An experiment of this nature was conducted by O.C. Fox in 1864 while
recovering from wounds sustained during the Civil War. His results are shown in the
table below (Monte Carlo Method).
25
d inches
Surface
Estimate of
3
4
Stationary
3.1780
253
3
4
Rotated
3.1423
939
5
2
rotated
3.1416
n drops
m crosses
500
236
530
590
inches
Table 3
Using an online applet to simulate the dropping of 100,000,000 needles an
estimate of =3.1415(528912708703) was found, accurate to five digits (Pilana, n.d.).
Results and Mathematics
This paper illustrates a different way to use the Monte Carlo method. Starting by
selecting random “points” in a unit n-cube, one counts the number of points that fall
inside of a partial n-sphere, centered at the origin. Using this proportion one can obtain
an estimate of by using newly developed functions. In two-dimensional space, one
actually chooses points from a unit square with its left vertex at the origin and calculates
the proportion of points that fall inside of the ¼ circle with center (0, 0) and radius 1.
Figure 16: Quarter circle centered at the origin with radius 1 bounded by a unit square.
In three-dimensional space, one chooses points from a unit 3-cube with a vertex at
the origin and three edges along the x1 , x2 and x3 -axes. Then one must calculate the
26
proportion of points that fall inside the 1/8-sphere. In general, this method involves
choosing points from a unit n-cube with a vertex at the origin and with n-edges along the
x1 , x2 ,..., xn axes and calculating the proportion of points that fall within the
1
n-sphere.
2n
First, find the volume of each n-sphere, starting with n=2.
R
V2sphere 2 R2 w2 dw
R
Using integration by parts, let u R2 w2 and dv dw .
du
2w
dw and v w
R 2 w2
2w2
R 2 w2 w R 2 w 2
R 2 w2
dw
w
w R 2 w2 R 2 sin 1
R
Now evaluate the definite integral as follows.
R
V2 sphere
w
2 w R 2 w2 R 2 sin 1
R 0
= R2
The volume of a 2-sphere is R 2 . This is the area of a circle. A 2-sphere is in
fact a circle and the “volume” is the area. A sphere is generated when a semicircle is
rotated about the x-axis. Consider the function f ( x) R 2 x 2 rotated about the x-axis.
The volume of the sphere is given by
R
V3 sphere
R
2
R
0
R
2
R 2 w2
dw
2
w2 dw
27
R
1
2 R 2 w w3
3 0
4
= R 3.
3
Figure 17: Cross-sections of a 4-sphere (Fuquay, 2002).
The disk method can be generalized to any n-sphere if one knows a formula for
the volume of a cross-section. The volume formula from the (n-1)-sphere is used to
represent the cross-sectional volume. Figure 17 shows various cross-sections for the 4sphere. These cross sections would be 3-spheres. The volume of a 4-sphere can be
obtained by using
4
R 3 as the formula for the cross-sectional volume.
3
4
R 3
V
R
R 2 w2
dw 2 43
3
R
0
R 2 w2
dw
3
Substituting w R sin and dw R cos d ,
2
8
V 2 R 2 R sin
0
3
3
2
R cos d
3
2
8
2 R 2 1 sin 2 R cos d
3 0
3
2
8
2 R3 1 sin 2 R cos d
3 0
3
2
8
2 R 4 1 sin 2 cos d
3 0
28
8
3
3
2
4 2
2
R 0 1 sin cos d
8
3
4 2
3
R 0 cos cos d
8
3
4 2
4
R 0 cos d.
Using the power reducing identity cos 2
1 cos 2
, obtains the following results
2
8 4 2 1 cos 2
V R
d
0
2
3
2
2
3
2
4 2
R 0 1 cos 2 d
2 4 2
2
R 0 1 2cos 2 cos 2 d
3
1 cos(4 )
2 4 2
2
2
R
1
d
2cos
2
d
d
0
0
0
2
3
1 2
2 4 2
2
2
R
1
d
2
cos
2
d
1
d
cos 4 d
0
0
0
2 0
3
2
1
1
4 2
2
2
R
sin
2
sin
4
0 2
0
0 8
0
1
2 4
1
R 0 sin sin 0 0 sin 2 sin 0
2 2
3 2
8
2
3
2
3
=
2 R4
2
4
R
2 4
(Weisstein, Hypersphere)
.
29
Unfortunately as the dimensions increase it becomes harder if not impossible to
visualize what is taking place. One more example may help clarify this concept. For a 5sphere, the volume is given by
V5 sphere 2
2
R
R 2 w2
2
0
2
R
0
2
R
0
R
4
R
2
dw
4
w2 dw
2
2R2 w2 w4 dw
R
2
1
R 4 w R 2 w3 w5
3
5 0
2
2
1
2 R5 R5 R5
3
5
V5 sphere
8 2 5
R.
15
So what does this look like in general? Can it even be generalized? To develop a
formula for the volume of an n-sphere, begin by stating that
Vnsphere
R
0
Sn R n
,
Sn r dr
n
n 1
where S n is the surface area of an n-sphere with a radius of 1. The unit n-sphere must
satisfy
Sn e r r n 1dr ... e
2
0
x12 ... xn2 dx1 ...dxn
n
e x dx (Weisstein, Hypersphere)
2
.
30
A function can now be introduced that will be very helpful in the development of
the volume of an n-sphere. The gamma family of distributions is a flexible family of
distributions on [0, ).The gamma function is defined as
( ) t 1e t dt .
0
Letting t r 2 , one has
( ) 2 e r r 2 1dr .
2
0
2
1
n 2 r n 1e r dr , so
0
2
1
1
1 1
S n n 2
2
2 2
n
n
n
2 2
,
Sn
1
n
2
substituting results in
n
Vn sphere
S Rn
2 2 R n
n
n
1
n n
2
1
1
Substituting n
2
n 1
2
2
n 1
2
n !!
n 2 !! 2
Rn
n 1
2
, results in
2
, n _ is _ odd
31
n
Vn sphere
2
n
!
2
R n , n _ is _ even
(McDonald, 2003)
Table 4 summarizes the work to the 10th dimension.
n
Vv sphere
2
V2sphere R2
3
4
V3 sphere R 3
3
4
2
V4 sphere
5
V5 sphere
6
2
8 2 5
R
15
3
V6 sphere
7
V7 sphere
8
6
4
V9 sphere
10
R6
16 3 7
R
105
V8 sphere
9
R4
V10 sphere
24
R8
32 4 9
R
945
5
120
R10
Table 4
The development of the volume of an n-cube is a much easier venture. One must
first look at the volume of a 2-cube or a square. The volume of a 2-cube is an area, and
32
the area of a square is s 2 , where s is the length of an edge. Similarly, the volume of a 3cube is s 3 . In general, the volume of an n-cube is represented by s n . While visualizing ncubes beyond n=3, two figures have been included to help with that visualization. Figure
18 shows the 4-cube projected into the plane, and Figure 19 shows how Mathematica
represents n-cubes from n=1 to n=5.
Figure 18: The graph of the 4-cube (tesseract) symmetrically projected into the plane
(Weisstein, Hypercube).
Figure 19: n-cube, from n=1 to n=5 (Weisstein, Hypercube).
Probabilities
33
Notation must first be clarified. Let n be the theoretical probability that a
random point chosen from U[0, 1) along the unit n-cube will fall inside or on the
1
n2n
sphere centered at the origin.
P = The empirical probability that a random point chosen from U[0, 1) along the unit n-
cube will fall inside or on the
1
hyper-sphere centered at the origin.
2n
1
R2
1 4 2
R
4
1 4
R3
8
3 3 3
R
6
1 1 2 4
R
2
4 16 2 4
R
32
Probabilities of 2 .7854 , 3 .5236 , 4 .3084 , have been calculated so far.
One will notice that the probabilities decrease as n increases. The volume of the
n-cube is then Vn cube s n . It’s easy to see that when s 1 , as n ,Vncube .
When s 1 , the volume of an n-cube remains constant at 1. What happens to the volume
of the n-sphere as n ? For the ease of calculations, let R 1 .
V2 sphere 3.1415
4
V3 sphere 4.1888
3
34
V4 sphere
2
4.9348
2
V5 sphere 5.2638
V6 sphere
V7 sphere
5.1677
6
16 3
4.7278
105
V8 sphere
V9 sphere
3
4
24
4.0587
32 4
3.2985
945
V10 sphere
5
120
2.5502
After the 5-sphere, the volume of the n-sphere begins to decrease. So while the
volume of the unit n-cube is fixed at 1, the volume of the unit n-sphere decreases for
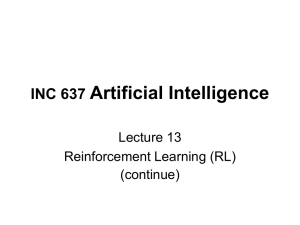
dimensions higher than five. Figure 20 shows the results graphically.
35
Figure 20: The volume of an n-sphere as a function of n.
This result is potentially troubling. As the dimensions increase, the number of
points that are available to be chosen also increases. A greater number of these points are
likely to fall outside of the n-sphere. This means that the number of trials required will
increase as the dimensions increase. Is the value of estimated to be the same in higher
dimensions?
After developing probabilities through 10-space one can develop formulas to
calculate . Once the program has generated N random points, the number of points
that are within one unit of the origin are counted, represented by C. The proportion of
points that fall inside the
1
C
n-sphere can now be calculated: P .
n
N
2
The law of large numbers implies that as N , P . Substituting Pn for n
into the probabilities formulas found earlier, one can solve for n to obtain a random
variable function that will estimate n .
Let n be the estimate for the value of in the n dimension.
P2
2
4
, solving for 2 , we get 2 4P2 .
P3
P4
3
6
42
32
3 6P3 .
4 32P4
5 60P5
6 3 372P6
36
3255P7
4
7 3
8 4 5952P 8
9 4
29295P9
2
10 5 119040P10
Table 5 shows the results of the procedure. The computer was programmed to
choose 1 million random points and calculate an estimate for . This process was
repeated for 100 trials to obtain the overall estimate for , second column. The third
column represents the closest estimate for in the 100 trials.
100,000,000 random points
Dimension
Closest estimate
2
3.14(33749)
3.1415(04)
3
3.14(247652)
3.141(672)
4
3.14(6113371)
3.1415(76674219491)
5
3.1(38861693)
3.1415(410231286174)
6
3.1(068389807461223)
3.1(1653955588751)
7
3.1(09551964626265)
3.1(19758209812801)
8
3.1(177043676024003)
3.1(321549271198452)
9
3.1(16178352559674)
3.1(368318687296557)
37
10
3.1(21780390406692)
3.141(414241794067)
Table 5
As evident from the table, this process does not perform well in dimensions
higher than five. This seems to fit with the previous calculations that the volume of the
sphere decreases in dimensions higher than five. Though the estimates seem to be getting
stronger again, this could easily be attributed to the increase in variation as more
variables are added.
So does choosing a larger number of points improve these estimates for higher
dimensions? If it does not, then does the value of remain constant for higher
dimensions? It does not seem possible that a constant could change value. But again it
seems counterintuitive that the volume of a sphere decreases as one increases dimension
beyond n 5 . If one believes that is in fact still 3.14159265358979.., then how can
one improve this process to obtain a closer estimate of ?
A blog was found that discussed n-dimensional cubes and spheres (Lippert, May
11, 2005). One participant mentioned an article that dealt with a similar problem by
restricting the size of the n-cube from which points are selected (Goldstein, Platt, and
Burges). After contemplating this notion, experiments were constructed in which the
section of the Java code that selects the random values that make up the coordinates of
the random point was altered. By restricting the values of each coordinate to the intervals
represented in the third column of Table 6, instead of the interval [0, 1), one is able to
obtain a closer estimate of .
n
interval
38
6
3.14(3589458142209)
[0, .9946]
7
3.14(5864865018313)
[0, .995]
8
3.141(8563412346634)
[0, .9951]
9
3.154878413601465
[0, .9952]
10
3.1556855946042437
[0, .995]
Table 6
Use in the Classroom
Geometry
For a geometry course, there are two lessons that can be used from this topic. In a
chapter on geometric probability, students can be motivated to find the analytical solution
to a probability question through numerical means. The use of the Monte Carlo method
in two dimensions can be a way of gaining this numerical solution. This provides for an
opportunity to teach through problem solving.
Using constructing software (Geometer’s Sketchpad), students can duplicate
Archimedes’s method of trapping . This lesson appears in the appendix.
AP Statistics
In an AP Statistics course, this topic can be used as a way of approaching two
concepts that are vital in AP Statistics, the use of Monte Carlo methods to approximate
solutions and the idea of confidence intervals. By having students construct confidence
intervals for their estimate, students are given practice in these constructions. In addition,
as a class some students’ confidence intervals will contain the true value of and some
won’t. This allows me to reemphasize what a C-level of confidence actually means.
39
Since students actually know the parameter that they are trying to estimate, the concept
becomes more concrete. Normally throughout the unit on confidence intervals students
have no idea what the parameter is. This is good; it’s what they would encounter in
practice using statistical methods. However, it is very easy for a student to think that
95% confidence means that there is a 95% chance that once a confidence interval is
found, the parameter is inside of that interval. I constantly have to repair that
misconception with students. Using the lesson plan that is attached in the appendix
allows them to see my point that the parameter is either in the interval or it is not. The
confidence comes in the procedure that is used to construct the confidence interval.
When I used the lesson attached this last spring, 13/15 students had 95%
confidence intervals that captured . I was able to talk about sample size and how that
affects our ability to gain a good estimate of the parameter. Students could see that by
increasing the sample size, we were able to decrease the width of the confidence interval.
By this time, most students had a firm grasp of that concept, but this is another way of
bringing across that point.
We also discussed the limits of this method for calculating . On the TI-83 Plus
calculator, using as few as 500 points causes an overload in the memory. The random
number generator on the TI-83 calculator also contains some flaws that are revealed
when conducting the lesson. This spring, three students obtained the exact same results.
This allowed me to talk about seeds and why there might be bias in our class wide results.
By using the TI-Navigator system, I was able to quickly collect everyone’s data in a few
seconds.
AP Computer Science
40
The major goals of the AP Computer Science program are laid out as:
Design and implement computer-based solutions to problems in a variety of
application areas
Use and implement well-known algorithms and data structures
Develop and select appropriate algorithms and data structures to solve problems
Code fluently in an object-oriented paradigm using the programming language
Java. Students are expected to be familiar with and be able to use standard Java
library classes from the AP Java subset.
Read and understand a large program consisting of several classes and interacting
objects. Students should be able to read and understand a description of the design
and development process leading to such a program
(College Board)
The assignment that I have included in the appendix addresses several of these
goals. Students are asked to design and implement a solution based on a description of
the problem. Students need to use “helper” classes to fully complete the assignment.
The Point class is from a previous assignment. Students create a variety of classes that
deal with geometry. Point is the first class that the students create and they are well
versed in its implementation. The Random class is a standard Java library class from the
AP Java subset. It is important that students can read the documentation for standard
classes and be able to implement them into their programs.
This project asks that they work in the object-oriented paradigm. It is an objectoriented assignment and not procedural.
41
References
Bohr, J. (2000, August 29). Machin’s method of approximating pi. Retrieved May 20,
2006, from http://ic.net/~jnbohr/java/Machin.html
Buffon’s Needle. (2006, April 29). Retrieved May 20, 2006, from http://en.wikipedia.org/
wiki/Buffon's_needle
Clawson, C. C. (1996). Mathematical mysteries: The beauty and magic of numbers.
Cambridge, MA: Perseus Books.
Coexeter, H. S. M. (1973). Regular Polytopes (3rd ed.). New York: Dover.
CollegeBoard AP. (2006). Computer Science Course Description. Accessed at
http://apcentral.collegeboard.com/courses/descriptions/1,,151-162-0-8879,00.html
Fuquay, J. (2002). The Hypersphere. Retrieved June 2, 2006, from
http://www.geocities.com/jsfhome/Think4d/Hyprsphr/hsphere.html
Goldstein, Platt, and Burges. (n.d.). Redundant bit vectors for quickly searching highdimensional regions. Microsoft Research.
Groleau, R. (2003, September). Approximating pi. Retrieved May 24, 2006, from
http://www.pbs.org/wgbh/nova/archimedes/pi.html
Gusmorino, P.A., III. (1998). Paul’s page of pi: Gregory, Leibniz, and Machin. Retrieved
June 1, 2006, from http://www.escape.com/~paulg53/math/pi/greg/index.html
John Machin. (2006, March 12). Retrieved May 16, 2006, from http://en.wikipedia.org/
wiki/John_Machin
Jovanovic, R. (2005, January). Machin’s Formula. Retrieved June 10, 2006, from
http://milan.milanovic.org/math/english/pi/machin.html
42
Khamis, H. (n.d.). Buffon’s Needle problem. Retrieved June 2, 2006, from Wright State
University’s Web site: http://www.math.wright.edu/People/Harry_Khamis/
buffons_needle_problem/index.htm
Kunkel, P. (2003, September 4). Buffon’s Needle. Retrieved May 20, 2006, from
http://whistleralley.com/buffon.buffon.htm
Larson, Hostetler, and Edwards. (2006). Calculus of a Single Variable Eighth Edition.
Boston, MA: Houghton Mifflin Company.
Linn, S., and Neal, D. (2006). Approximating π with the Golden Ratio. Mathematics
Teacher, 99(7), 472–477.
Lippert, E. (2005, May 13). High-dimensional spaces are counterintuitive, part two.
Message posted to http://blogs.msdn.com/ericlippert/archive/
2005/05/13/417250.aspx
McDonald, K. T. (2003, February). Volume and surface area of an N-Sphere. Lecture
given at Princeton University, Princeton, NJ.
Metropolis, N. (1987). Los Alamos Science. [Special issue].
Monte Carlo Method. (n.d.). Retrieved May 13, 2006, from
http://www.riskglossary.com/link/monte_carlo_method.htm
O’Connor, J. J, and Robertson, E. F. (2001, August). A history of pi. Retrieved April 30,
2006, from http://www-groups.dcs.stand.ac.uk/~history/HistTopics/Pi_through_the_ages.html
Ortiz, A. L. (1998, February 23). Formula for the surface area of a sphere in Euclidean
N-Space. Retrieved May 17, 2006, from University of Waterloo David R.
43
Cheriton School of Computer Science’s Web site:
http://www.cs.uwaterloo.ca/~alopez-o/math-faq/node75.html
Peterson, I. (2003). The bias of random-number generators. MAA Online. Retrieved May
3, 2006, from http://www.maa.org/mathland/mathtrek%5F09%5F29%5F03.html
Pilana, S. (n.d.) Buffon’s Needle experiment. Retrieved May 22, 2006, from
http://www.geocities.com/CollegePark/Quad/2435/buffon.html
Reese, G. (n.d.). Buffon’s Needle: An analysis and simulation. Retrieved May 22, 2006,
from the Office of Mathematics, Science, and Technology Education at the
University of Illinois at Urbana-Champaign’s Web site:
http://www.mste.uiuc.edu/reese/buffon/buffon.html
Smoller, L. (2001, February). The amazing history of pi. Retrieved June 3, 2006, from
University of Arkansas at Little Rock Department of History’s Web site:
http://www.ualr.edu/lasmoller/pi.html
Weissten, E. (1999). Hyperspace. MathWorld—A Wolfram Web Resource. Retrieved May
1, 2006 from http://mathworld.wolfram.com/Hyperspace.html
Weisstein, E. (1999). Machin’s Formula. MathWorld—A Wolfram Web Resource.
Retrieved May 1, 2006 from
http://mathworld.wolfram.com/MachinsFormula.html
Weisstein, E. (1999). Monte Carlo Method. MathWorld—A Wolfram Web Resource.
Retrieved May 1, 2006 from http://mathworld.wolfram.com/
MonteCarloMethod.html
44
Weisstein, E. (2004, January 25). Machin-like formulas. MathWorld—A Wolfram Web
Resource. Retrieved May 3, 2006 from http://mathworld.wolfram.com/MachinLikeFormulas.html
Weisstein, E. (2005, December 12). Buffon’s Needle Problem. MathWorld—A Wolfram
Web Resource. Retrieved May 7, 2006, from
http://mathworld.wolfram.com/BuffonsNeedleProblem.html
Weisstein, E. (2006, March 15). Hypercube. MathWorld—A Wolfram Web Resource.
Retrieved May 3, 2006 from http://mathworld.wolfram.com/Hypercube.html
Weisstein, E. (2006, April 17). Transcendental numbers. MathWorld—A Wolfram Web
Resource. Retrieved May 1, 2006 from http://mathworld.wolfram.com/
TranscendentalNumbers.html
Weisstein, Eric. (2006, April 28). Algebraic numbers. MathWorld—A Wolfram Web
Resource. Retrieved May 1, 2006 from
http://mathworld.wolfram.com/AlgebraicNumbers.html
45
Archimedes’s Estimation of
Geometric Constructions Project
Brian Reece
Johnston High School
brian.reece@johnston.k12.ia.us
APPENDIX
NCTM Standards
Geometry
Analyze characteristics and properties of two-dimensional geometric shapes
and develop mathematical arguments about geometric relationships
Use visualization, spatial reasoning, and geometric modeling to solve
problems
Archimedes was the first to formalize an approximation of . You are going to duplicate
the first few steps of his method.
1. Begin by opening Geometer’s Sketchpad
2. Construct a circle with an arbitrary radius
3. Construct a hexagon that is inscribed inside of the circle that you
constructed. (You may want to hide some objects as you go)
4. Construct a hexagon that superscribes the circle
46
5. Using the measurement tool of Sketchpad, calculate the semi-perimeter of
each of the two hexagons that you constructed.
6. Now using what you’ve already done construct a dodecagon that is inscribed
in the circle and one that superscribes the circle.
7. Calculate the semiperimeters of the two dodecagons.
1
Archimedes gave the area of a circle as Acircle rC . Using this formula for the area of a
2
circle and the more familiar formula for the area of a circle ( r 2 ) find an equation for .
Then use the semiperimeters you found and any other information you need to find an
estimate for .
47
Estimating Pi through Simulation
Brian Reece
Johnston High School
brian.reece@johnston.k12.ia.us
NCTM Standards:
Data Analysis and Probability
use simulations to explore the variability of sample statistics from a known population and
to construct sampling distributions
use simulations to construct empirical probability distributions
Geometry
use geometric models to gain insights into, and answer questions in, other areas of
mathematics
AP Statistics Content covered:
“Law of large numbers” concept
Simulation of probability distributions
Large sample confidence interval for a proportion
Materials needed:
TI-83 or TI-84
Pencil
TI-Navigator System
1.
The program SIM is distributed to students from Instructor using the TINavigator System. This program is included in this handout.
2. Talk about what the calculator is doing. I share the program with the class so that
they realize how the process is working. The calculator is selecting random xvalues between 0 and 1 and random y-values between 0 and 1. The calculator is
then going to count the number of times a point is in the region bounded by the
first quadrant of the x-y plane and a circle centered at the origin with a radius of
1.
3. Students are asked to run 10 trials of size 50 on their calculator. Students are then
asked to record the number of points in this bounded region for each simulation in
list L4.
4. Next students run 10 simulations of size 100 on their calculator. Record the
number of points in the bounded region in list L5.
48
Region bounded by 1st
Quadrant and a circle centered
at the origin with a radius of
1.
Notice in this example that there are
5 points outside of the region and
45 inside the region.
Depending on the objectives of your class there are different directions you can take
at this point. The handout I have included is for my AP Statistics course and uses
the concept of confidence intervals. This could also be used in geometry by
removing the construction of confidence intervals and instead focusing on the
probability of selecting a point that is inside of the bounded region (Ä/4). I also focus
on the drawbacks of this process (memory, time, efficiency, etc.)
49
PROGRAM: SIM
0L
0I
Disp “HOW MANY POINTS?”
Prompt N
rand(N)L1
rand(N)L2
ClrDraw
FnOff
0Xmin
1Xmax
.1Xscl
0Ymin
1Ymax
.1Yscl
Plot1(Scatter,L1,L2)
Circle(0,0,1)
Pause
((L1 - 0)2 + (L2 - 0)2)L3
For(I,1,N,1)
If (L3(I) < 1 or L3(I) = 1)
Then
L+1 L
End
End
ClrHome
Disp “THE NUMBER
Disp “OF POINTS IN
Disp “THE REGION
Disp “IS
Disp L
50
Estimating through Simulation
Student Handout
1. Get program SIM from Instructor
2. The calculator is selecting random x values between 0 and 1 and random y-values
between 0 and 1. The calculator is then going to count the number of times a
point is in the region bounded by the first quadrant of the x-y plane and a circle
centered at the origin with a radius of 1. You are to record the number of points in
this bounded region for each of ten simulations in list L4.
3. You are going to run 10 trials of size 50 on your calculator.
4. Now run 10 simulations of size 100 on your calculator. Record the number of
points in the bounded region in list L5.
Region bounded by 1st
Quadrant and a circle centered
at the origin with a radius of
1.
Notice in this example that there are
5 points outside of the region and
45 inside the region.
51
5. Using your 10 simulations of size 50 as one large sample of size 500, construct a
95% confidence interval for the proportion of points that can be found inside the
bounded region.
6. Using your 10 simulations of size 100 as one large sample of size 1000, construct
a 95% confidence interval for the proportion of points that can be found inside the
bounded region.
7. Multiply the bounds of each confidence interval by 4. What have we just
estimated? Why?
52
Estimating Pi through Simulation
AP Computer Science
Brian Reece
Johnston High School
brian.reece@johnston.k12.ia.us
AP Computer Science Objectives:
Design and implement computer-based solutions to problems in a variety of
application areas
Use and implement well-known algorithms and data structures
Develop and select appropriate algorithms and data structures to solve problems
Code fluently in an object-oriented paradigm using the programming language
Java. Students are expected to be familiar with and be able to use standard Java
library classes from the AP Java subset.
Read and understand a large program consisting of several classes and interacting
objects. Students should be able to read and understand a description of the design
and development process leading to such a program
Specifications:
Your program should
use the Random class (Built-in Java class) Review API online.
use the Point class (user defined- you should already have this class)
choose n random points from [0,1). n is defined by the user
test whether the points are inside of the circle defined by the equation x 2 y 2 1.
calculate the proportion of total points that lie inside of the circle.
estimate (Hint: Geometric probability)
Output the estimated value of .
include all necessary comments
Extra credit:
Alter your code so that the user can define the center and the radius of the circle.
53
import java.util.*;
import java.io.*;
public class PiEstimator {
/**
* Method main
*
*
* @param args
*
*/
public static void main(String[] args) {
File file = null;
long timeBefore = System.currentTimeMillis();
int repetitions =1000000;
int numberOfTrials = 100;
double OverallEstimate = 0;
if (args.length > 0) file = new File (args[0]);
if (file == null ) {
System.out.println ("Default: 10_DtextOutput.txt");
file = new File ("10_DtextOutput.txt");
}
try {
// Create a FileWriter stream to the file
FileWriter file_writer = new FileWriter (file);
// Put a buffered wrapper around it
BufferedWriter buf_writer = new BufferedWriter (file_writer);
// In turn, wrap the PrintWriter stream around this output stream
// and turn on the autoflush.
PrintWriter print_writer = new PrintWriter (buf_writer,true);
print_writer.println("1,000,000 points in 10-D space");
print_writer.println();
for(int j=0;j<numberOfTrials;j++){
int count =0;
for(int i =0;i<repetitions;i++){
Point point = SelectRandomPoints();
double distance =
Point.Distance(point,Point.Origin);
if(1>distance || 1 == distance){
count = count + 1;
//keeps a running
count of the
//"successes"
}
}
//Calculates the proportion of successes
double proportion = (double)count/(repetitions);
//Calculates the estimate of pi using the function
generated
//in the paper
double pi= Math.pow((double)119040*proportion,(double)1/5);
OverallEstimate = OverallEstimate + pi;
print_writer.println("pi = " + pi);
double error = Math.abs((double)(Math.PI -pi)/Math.PI);
long timeAfter = System.currentTimeMillis();
long elapsed = timeAfter - timeBefore;
print_writer.println("Elapsed time in milliseconds: " +
elapsed);
print_writer.println();
if (print_writer.checkError ()) {
System.out.println ("An output error occurred!" );
}
timeBefore = System.currentTimeMillis();
}
print_writer.println((double)OverallEstimate/numberOfTrials);
54
}
catch (IOException ioe){
System.out.println("IO Exception");
}
}
/**
*Method SelectRandomPoints
*
creates a new instance of the Random class
*
then a double value is pseudorandomly generated and returned from
* an approximately uniform [0,1) distribution.
*
*
A Point is then generated using these n random values
*
*
Depending on the dimension, coordinates can from randomly generated or
*
locked at 0.
*/
public static Point SelectRandomPoints()
{
Random randomizer = new Random();
double randomY = randomizer.nextDouble();
double randomX = randomizer.nextDouble();
double randomZ = randomizer.nextDouble();
double randomW = randomizer.nextDouble();
double randomV = randomizer.nextDouble();
double randomU = randomizer.nextDouble();
double randomT = randomizer.nextDouble();
double randomS = randomizer.nextDouble();
double randomR = randomizer.nextDouble();
double randomP = randomizer.nextDouble();
Point aPoint = new Point(randomX,randomY,randomZ,randomW,
randomV,randomU,randomT,randomS,
randomR,randomP);
return aPoint;
}
}
55
public class Point {
private
private
private
private
private
private
private
private
private
private
double
double
double
double
double
double
double
double
double
double
XCoordinate
YCoordinate
ZCoordinate
WCoordinate
VCoordinate
UCoordinate
TCoordinate
SCoordinate
RCoordinate
PCoordinate
=
=
=
=
=
=
=
=
=
=
0;
0;
0;
0;
0;
0;
0;
0;
0;
0;
public static final Point Origin = new Point(0,0,0,0,0,0,0,0,0,0);
/**
* Point Constructor
*
Input: 10 double values
*
*
Output: point
*/
public Point(double X, double Y, double Z, double W,double V,double U,
double T,double S, double R, double P) {
XCoordinate = X;
YCoordinate = Y;
ZCoordinate = Z;
WCoordinate = W;
VCoordinate = V;
UCoordinate = U;
TCoordinate = T;
SCoordinate = S;
RCoordinate = R;
PCoordinate = P;
}
/**
*Method Distance
*
*
input - two points
*
output - distance between the two points
*
*
*/
public static double Distance(Point pointA, Point pointB){
double distance =
Math.sqrt(Math.pow(pointA.XCoordinate - pointB.XCoordinate,2)
+Math.pow(pointA.YCoordinate - pointB.YCoordinate,2)
+Math.pow(pointA.ZCoordinate - pointB.ZCoordinate,2)
+Math.pow(pointA.WCoordinate - pointB.WCoordinate,2)
+Math.pow(pointA.VCoordinate - pointB.VCoordinate,2)
+Math.pow(pointA.UCoordinate - pointB.UCoordinate,2)
+Math.pow(pointA.TCoordinate - pointB.TCoordinate,2)
+Math.pow(pointA.SCoordinate - pointB.SCoordinate,2)
+Math.pow(pointA.RCoordinate - pointB.RCoordinate,2)
+Math.pow(pointA.PCoordinate - pointB.PCoordinate,2));
return distance;
}
}
56
 0
0
advertisement
Related documents






Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users