Solutions
advertisement

CS 151, Written Homework, Set 3, Solutions
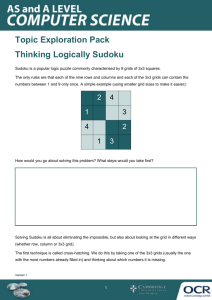
1. This problem returns to the Sudoku game we considered in week 2. In this problem
we’re going to try to formalize the Sudoku game as a Constraint Satisfaction Problem
(CSP).
1. What is the set of variables, and what is the domain of possible values for each?
There is one variable for each square (empty or full). The domain of each variable is
{1, …, 9}. You could also formulate the problem as one variable per empty square
only and eliminate the unary constraints below, and slightly modify the other
constraints to account for the filled in values.
2. List all of the constraints for the problem, including the ones provided by the
starting board. How many variables are involved in each constraint?
There are 4 classes of constraints. One set of constraints ensures that variables in
each row all take a different value. Another set ensures the same for columns and
another set for squares. In each of the previous constraints, 9 variables are involved.
Finally, there is a set of unary constraints that ensures that the initially full squares
take on their original values (i.e., we can’t change the values on the starting board).
3. We said in class that the order in which you consider variables can have a big
impact on the performance of basic backtracking search in CSPs. Which variable
ordering would you expect to work better, the degree heuristic, or the minimum
remaining values heuristic? Why?
The remaining values heuristic. In general this heuristic works better for CSPs. Also,
in Sudoku, the number of remaining values for some variable decreases very quickly.
4. An interesting recent finding about the 3-SAT problem is that the compute time
required to solve a particular problem instance is correlated with the number of
solutions that exist (problems with lots of solutions or exactly one solution are
easy, but it’s the ones in the middle that are hard). However, every Sudoku
problem has exactly one solution. What, then, is the difference between “easy”
and “hard” Sudoku problems?
The difference is that with easy problems, the constraints limit the values of variables
very quickly, making it efficient to find the right assignment because large portions of
the search space can be avoided. In very easy problems, running arc consistency will
yield only one consistent value for each variable. In contrast, “hard” problems do not
limit the values of variables, forcing the algorithm to explore more of the search
space before finding the solution.
2. Another technique that might work well in solving the Sudoku game is local search.
Please design a local search algorithm that is likely to solve Sudoku quickly, and
write it in psuedocode (in C style or in Russell&Norvig style). You may want to look
at theWalkSAT algorithm for inspiration. Do you think it will work better or worse
than the best incremental search algorithm on easy problems? On hard problems?
Why?
function solveSudoku( SudokuBoard game, int numIter)
foreach unbound var in game, assign randChoice([1…9])
for i=0 to numIter:
if checkConstraints(game) return game
choose a variable, v, that violates a constraint
v = randChoice([1…9]) (ensuring v gets a new value)
This algorithm will probably work better than incremental search on hard problems, but
not easy problems because on easy problems, incremental search will direct itself quickly
toward the correct solution, while the random search will needlessly explore fruitless
assignments of values to variables. On the other hand, on hard problems, this approach
might stumble on the right solution pretty quickly, while local search will probably take a
very long time to find it.
3. We presented simulated annealing in lecture as a local search algorithm which uses
randomness to avoid getting stuck in local maxima and plateaus.
1. For what types of problems will greedy local search (hill climbing) work better
than simulated annealing? In other words, when is the random part of simulated
annealing not necessary?
For problems with no local maxima in the cost function, greedy search will work
better.
2. For what types of problems will randomly guessing the state work just as well as
simulated annealing? In other words, when is the hill-climbing part of simulated
annealing not necessary?
For problems where the cost function has no real structure—i.e., the area around the
global maximum looks like any other area of the function, so you would have no idea
that you are even getting close to the solution, nor would the shape of the function
necessarily push you in the right direction to find it.
3. Reasoning from your answers to parts (b) and (c) above, for what types of
problems is simulated annealing a useful technique? What assumptions about the
shape of the value function are implicit in the design of simulated annealing?
Problems with a cost function with an overall global structure, but with some local
maxima.