Carbon Fibre Electrodes and their Qualities in Salt Water
advertisement

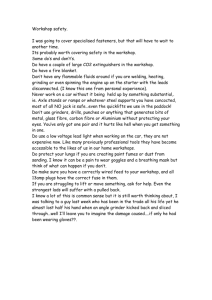
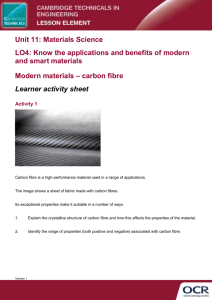
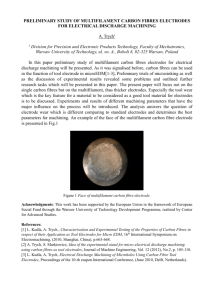
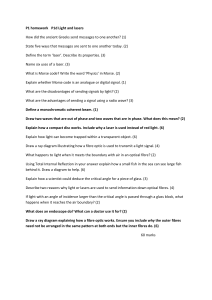
Carbon Fibre Electrodes and their Qualities in Salt Water Lennart Crona and Anders Brage Defence Research Establishment Stockholm, Sweden Abstract: For many years zinc electrodes have been used to measure electric fields in ocean environments. Typical stabilisation times are of the order of one week. However, it is necessary in certain application to have electrode sensors operational immediately after deployment. This requirement initiated the development of a new type of electrode based on carbon fibres. Carbon fibres are very homogenous with much lower impurity levels than bulk graphite. Moreover, the surface in contact with water can easily be large and well controlled by creating a bundle of fibres. Measurements of impedance and sensor noise have been made in a small water tank. The electrode impedance is found to increase rapidly with decreasing frequency, indicating that the electrodes behaves like a large capacitor, i.e. are insensitive to the DC component of the electric field. Sea trials have shown that electrodes are operational within 15 minutes after deployment. Background and sensor noise have been measured in the archipelago of Stockholm. Keywords: Carbon fibre, electrodes, electric sensors, sensor noise, ELF 1. INTRODUCTION In some applications there is a requirement for an electric sensor to be in full function immediately after deployment. For standard electrode materials e.g. Ag/AgCl or zinc plates, the main problem is the slow electrochemical process before a steady equilibrium potential is obtained [1-3]. A process that may take up to one week for zinc. This problem may be overcome by special treatment and storage of the electrodes. The conductivity varies between 0.3 and 3.3 S/m along the coast of Sweden. Therefore, there was a need for a dry sensor which could easily be stored, handled and deployed and taken out of the water repeatedly without degrading. It must have low self noise and fulfil the requirement of being operational in any water immediately after deployment. The carbon fibre electrodes seem to fulfil our requirements. 2. ELECTRODE DESIGN Carbon fibres have some advantages over bulk graphite plates. The carbon fibres are very homogeneous, have a large surface to weight ratio and are chemically inert in water. The type of fibre used is TORAY T300 with 7 micrometer diameter and the surface to weight ratio is about 0.5 m²/gram. One electrode can consist of totally 1.2 million fibres with the length of 10 to 20 cm. One end of the fibres are impregnated with epoxy. After hardening the ends are ground to lay bare the fibre ends for metal plating for the leads to connect to, making an electric contact with the fibres. The fibre tufts are solvent washed to take away the finish of insulating epoxy coating in order to enhance the fibre surface contact with water. The contact area between lead and fibre ends are protected from water migration by another epoxy potting. Signal leads insulation have to be inert to water and pressure variations and yet it should be possible to seal it in an ordinary epoxy operation. Etched PTFE mantled signal leads of silver coated copper would work, and further more give a local corrosion element if the mantling would be damaged, preventing erroneous signals to be collected. In Fig. 1 there is a picture of a 20 cm carbon fibre electrode. A plastic net is used to keep fibres on place. The electrodes are then covered with a cap of a fibre material in order to be protected from water movements, intrusion of mud, small animals and plants. Water moving near the electrode surface will give rise to noise. We have not seen any growth of living material on the fibres after 8 month in water. The carbon fibre diameter, 7 micrometer, is too small for larvae to settle. The cap have to be thick enough to be completely dark inside to minimise the growth of algae. The fibres in the cap also seem to be too small for settling of small animals on the outer surface of the cap. It is necessary to make some small holes in the cap to get rid of the air inside the cap during deployment. 3. ELECTRODE IMPEDANCE At frequencies above 1 Hz the impedance is almost resistive and for a pair of electrodes below 10 ohms. Typically the resistance water-electrode is about 3 ohms and the resistance electrode-wire is below 1 ohm. The measurements were made in a small water tank with the same conductivity as in the archipelago of Stockholm, 0.8 S/m. The impedance was measured with a carbon electrode sensor as a receiver by using a transmitter in the same tank. |Z| (ohms) 1000 100 10 1 0,001 With decreasing frequency the impedance is increasing fast. The carbon fibre electrodes acts almost like a capacitor. If the electrodes are charged and left unloaded the voltage remains for a long time. To discharge and stabilise the sensor a shunt resistor was used at the input of the amplifier. In a typical application a 330 ohms resistor was used. At 1 mHz the impedance is about 400 ohms. In that case the voltage will be attenuated by the factor 330/730. For frequencies lower than 1 mHz the impedance will be too big. Thus, the carbon fibre sensor can be used down to 1 mHz. Fig. 2 and 3 shows examples of the absolute value of impedance and phase shift as a function of frequency. 0,1 1 10 Frequency (Hz) Fig. 2. The absolute value of the impedance as a function of the frequency in a water tank with the conductivity 0.8 S/m Phaseshift (degree) Fig. 1. Carbon fibre sensor. The fibres (1.2 million) are seen inside the net. The lead is connected to the fibre ends in an epoxy coating. 0,01 0 -10 -20 -30 -40 0,001 0,01 0,1 1 10 Frequency (Hz) Fig.3. Phase shift as a function of the frequency in a water tank with the conductivity 0.8 S/m 4. SENSOR NOISE Amplifier noise have been measured by putting a 10 ohms resistor at the input of the amplifier and connecting a FFT-analyser to the output. The resistor was exchanged with a pair of carbon fibre electrodes placed in the earlier mentioned small tank. The result from the measurement shows that in the interval 3 mHz to 1000 Hz it was not possible to see any difference in noise between 10 ohms and the carbon fibre sensor. At 1 mHz the sensor gave 5 dB more noise than the 10 ohms. The conclusion is that in the tank the sensor noise is determined by the amplifier noise down to 3 mHz. The sensor noise was also measured out in the sea. The natural background field is strong and has to be effectively suppressed. One way is to place two pairs of electrodes in parallel near each other and subtract the signals. What is left is noncoherent noise consisting of amplifier noise, electrode noise, noise from water waves and currents, misalignment of sensors and other sources of noise. For this test a 6 m plastic pipe was used. At each end a pair of electrodes was attached with 1 m electrode distance. This sensor system was deployed at the depth of 37 m in the archipelago of Stockholm. The result after subtraction of the two sensor signals was a reduction of the background noise with 20 -27 dB in the range 0.1 - 10 Hz. This noise reduction can also be used as an alternative measure of sensor noise. More noise reduction means that the coherent part of the signals is bigger. It also means that the S/N ratio is good for both sensors. If one of the sensors is getting noisier the coherency will decrease and also the noise reduction. Therefore, it is possible to make comparisons at different occasions to see if something have happened to the sensors. The remaining noise level lies 5 - 14 dB over amplifier noise. In Fig. 4 curves are drawn for amplifier noise, sensor noise in a tank, the raw signal and the subtracted signal from the sea measurement. Fig. 5 shows examples of time series and spectra for raw signals and subtracted signals. Furthermore, the coherency is calculated and it is very high. Sensor systems have been in use since September 1995. During this time they have also been out of the water for some week. In May 1997, after 1½ year they were still working without any degradation of its performance. Voltage dBV/(Hz)½ -100 -110 -120 -130 -140 -150 -160 -170 -180 -190 -200 0,001 C in water (1 m) C in water, diff (1 m) C in a tank amp-noise (10 ohms) 0,01 0,1 1 10 100 1000 Frequency (Hz) Fig. 4. Amplifier noise with 10 ohms at the input and sensor noise in a water tank with the conductivity 0.8 S/m coincide with one exception for 1 mHz where sensor noise is higher. The uppermost line is an example of background noise in the archipelago of Stockholm with the electrode distance 1 m. The water depth was 37 m and the conductivity 0.8 m/s. The middle line shows the noise level after subtracting signals from two parallel closely placed sensors. Fig. 5. Background noise for two parallel, closely placed, sensors in the archipelago of Stockholm. The electrode distance was 1 m, the water depth 37 m and the conductivity 0.8 S/m. Amplifier gain was set to 80 dB and high pass filter to 0.1 Hz. (a) and (b) show time series and spectra. In (c) the signals from the two sensors have been subtracted. (d) shows the coherency between the sensors. Note that the scale interval is 0.9 to 1. 5. RAPID DEPLOYMENT The most important aim for developing the carbon fibre sensor was to get a low noise sensor that could be used immediately after deployment. To test this quality we used the earlier described 6 m pipe with two sensors. Fig. 6 shows raw signal (upper) and difference or subtracted signal (lower) 15, 30 and 120 minutes after deployment. A 80 dB ac-amplifier with a high pass filter at 0.1 Hz was used. After 120 minutes the sensor has reached full performance. At 1 Hz the noise reduction is 27 dB. Already after 15 minutes the corresponding figure is 20 dB. The conclusion is that the carbon fibre sensor is satisfyingly working after 15 minutes and it is in full function within 2 hours. Fig. 6. Electric fields (dB re 1V/m) in water as a function of frequency (Hz). Raw signal (upper) and subtracted signal (lower) after 15 minutes (a ), after 30 minutes (b) and after 2 hours (c). 6. APPLICATIONS In connection with measurements of the induced electrical field across a narrow channel caused by moving water, at the West Coast of Sweden, carbon fibre electrodes were used [4]. One of the goals was to compare carbon fibre electrodes with Ag/AgCl electrodes. The electrodes were connected to a high impedance multimeter. The result confirmed that carbon fibre electrodes can not be used for frequencies much lower than 1 mHz. The tide that was easily detected by the Ag/AgCl could not be seen at all by the carbon fibre sensor. It was possible to use the carbon electrodes as a, low noise, reference sensor to a Ag/AgCl sensor to reduce mutual electric field noise for frequencies where the coherency was good. Triaxial carbon fibre sensors are in use at a magnetic range station to measure electric field ship signatures. Se Fig. 7. In the future carbon fibre electrodes can be used as alternatives to zinc and Ag/AgCl in applications where their is now demand for dc-measurements. The following list gives some applications. near field sensor at ranges buoy-sensor surveillance sensor mine sensor rapidly deployable sensor 7. SUMMARY AND CONCLUSIONS Carbon fibre electrodes was developed and tested. The problem with connecting the fibres to a lead have been solved. They can be stored dry without any special arrangement and be deployed in any water independent of the salinity. The sensor can be used within 15 minutes and its performance is very good within 2 hours. Currently, the experience is that they are still in full function after 1½ year in water. The operational frequency range is down to 1 mHz. The upper frequency cut-off is not tested but is higher than 3 kHz. Under 1 mHz the behaviour is limited by the increasing impedance. The electrode noise is lower than the amplifier noise. It is therefore important to construct amplifiers with even lower noise, especially at frequencies below 10 Hz. It is important to continue long time tests to see if they are degrading and if biologic activity may influence the performance. 8. PATENTS The international patent application PCT SE 96 / 01202 has been launched, for the carbon fibre electrode sensor, with priority demanded from the date of the Swedish patent application 950325-4 launched September 9, 1995. Inventor Anders Brage, Applicant National Defence Research Establishment. 9. REFERENCES [1] D.J.G. Ives, G.J. Janz, Reference Electrodes. New York and London: Academic Press, 1961. [2] J.H. Filloux, Instrumentation and experimental methods for oceanic studies, in Geomagnetism, vol.1, edited by J.A.Jacobs. San Diego: Academic, 1987, pp. 143-248. [3] G. Petiau and A. Dupis, ”Noise, temperature coefficient and long time stability of electrodes for telluric observations,” Geophysical Prospecting, 1980, 28, pp. 792-804. [4] L. Crona, T. Fristedt, P. Lundberg and P. Sigray, to be published. 10. BIOGRAPHIES Lennart Crona was born in 1944 in Stockholm, Sweden. He received the M.Sc. in 1971 in engineering physics from the University of Uppsala, Sweden. Since 1970, he has been employed by the Defence Research Establishment in Stockholm, where he has been engaged in research and development of electric sensor systems. Anders Brage was born in 1946 in Motala, Sweden. He received the M.Sc. in 1987 in Material Science from the Royal Institute of Technology in Stockholm, Sweden. Since 1979 he has been employed by the Defence Research Establishment in Stockholm. He works at the Department of Materials. Fig. 7. Triaxial carbon fibre sensor. Electrode distance 1 m.